Предложение относится преимущественно к области транспортной техники, подъемного оборудования и станкостроения, а более конкретно - к регулируемым и программируемым передачам вращательного движения нефрикционного типа для автомобилей, тракторов, тепловозов, лифтов, станков и т.д. Оно может быть использовано также в измерительной технике и приводных системах любых инерционных устройств, например, с асинхронными электродвигателями.
Пределы совершенствования шестеренчатой передачи ограничены принципом рычага и последовательной работой соединительных элементов - зубьев, соединенных с рычагами. В то же время известны клиновые передачи вращения с более свободными соединительными элементами (см., например, F.P.Soprunoff, Патент Германии N 236138 от 12.05.1910, kl.: 47h-14). Здесь в основе принципа - взаимодействие трех тел вращения, снабженных направляющими, через дополнительные подвижные соединительные тела. Эти передачи усовершенствованы путем придания телам вращения и системе подачи соединительных элементов более совершенных форм (см., например, L.Mackta, Патент США N 2764030 от 25.09.56 по НКИ 74-216.3), а также выполнением направляющих у двух из трех тел в виде замкнутых синусоид (см., например, Р.М.Игнатищев и др., А.С. СССР N 605926 от 14.01.1975 по МКИ: E 21 B 4/00), в результате чего потребность в системе подачи вообще отпадает. Однако каждая из данных кинематических схем может быть реализована только с фиксированным передаточным отношением.
Ближайшим прототипом предложенному устройству является передача с бесступенчатым изменением крутящего момента, предложенная В.Сердюковым и Н.Сесюниным (см. А.С СССР N 1578401 от 10.03.88 по МКИ: F 16 H 25/06). Она содержит два тела вращения, ведущее и ведомое, и третье, опорное, снабженные каждое направляющими, две из которых выполнены периодическими по углу поворота (синусоидальными), а также соединительные элементы, помещенные в направляющие трех тел одновременно. Два из трех тел соединены соответственно с ведущим и ведомым валами. В качестве соединительных элементов использованы шарики. Изменение передаточного отношения производится изменением скорости подвижного опорного тепа, для чего применено дополнительное приводное устройство.
Недостатком устройства-прототипа является чрезмерно высокая мощность дополнительного приводного устройства, которая по необходимости равна или соизмерима с мощностью, транслируемой передачей. Здесь по существу использованы дифференциальные свойства передачи для суммирования (вычитания) двух движений. Кроме того, в данном устройстве велики потери на трение и износ направляющих, т. к. условия качения для шаровых соединительных элементов в трех разнонаправленных системах направляющих никогда не могут быть выполнены.
Целью данного предложения является снижение мощности в системе управления, повышение КПД и расширение функциональных возможностей.
Поставленная цепь достигается тем, что по крайней мере одна периодическая направляющая имеет переменный по углу поворота период.
Она может содержать системы ввода и вывода соединительных элементов, соединенные с органом управления, три тела могут быть расположены соосно, направляющие двух из трех тел могут иметь форму спиралей, по крайней мере одна из которых может иметь переменный по углу поворота шаг.
Направляющие двух из трех тел могут быть синусоидальными и по крайней мере одна из них имеет переменный по углу поворота период.
Ориентация направляющей третьего тела может иметь перпендикулярную вращательному движению компоненту.
Цель достигается также тем, что соединительный элемент содержит три свободных соосных колеса, контактирующих каждое с одной направляющей соответствующего тела.
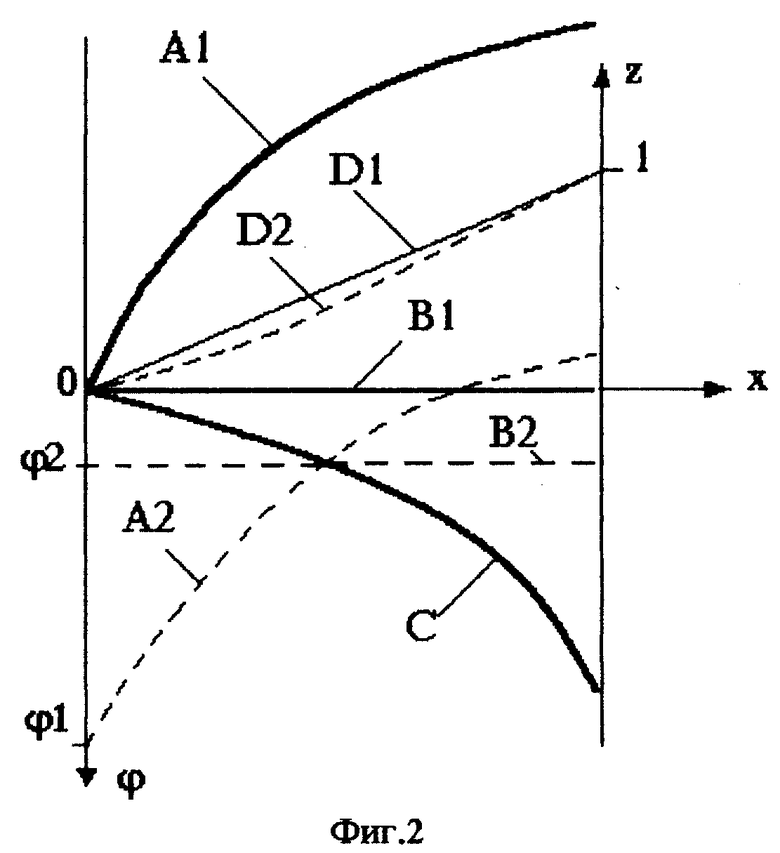
На Фиг.1 представлена цилиндрическая передача вращения с двумя спиральными направляющими переменного шага.
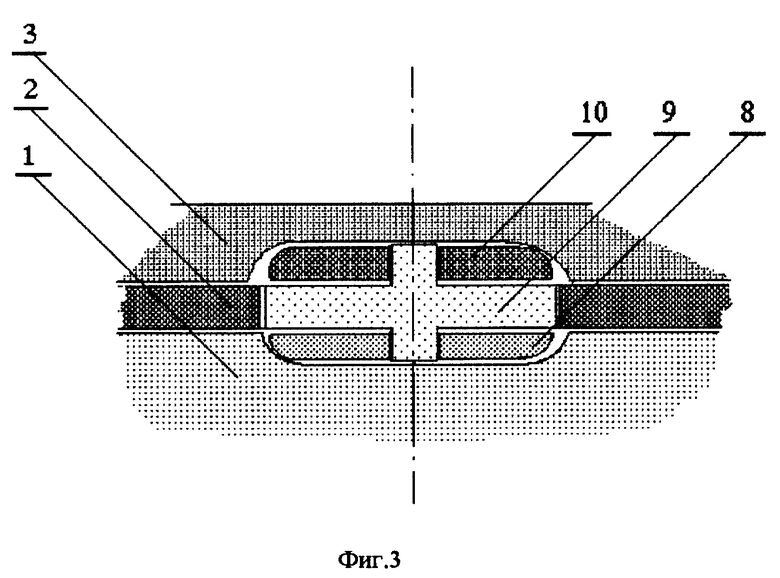
На Фиг. 2 представлены графики, поясняющие работу передачи с двумя спиральными направляющими по Фиг.1.
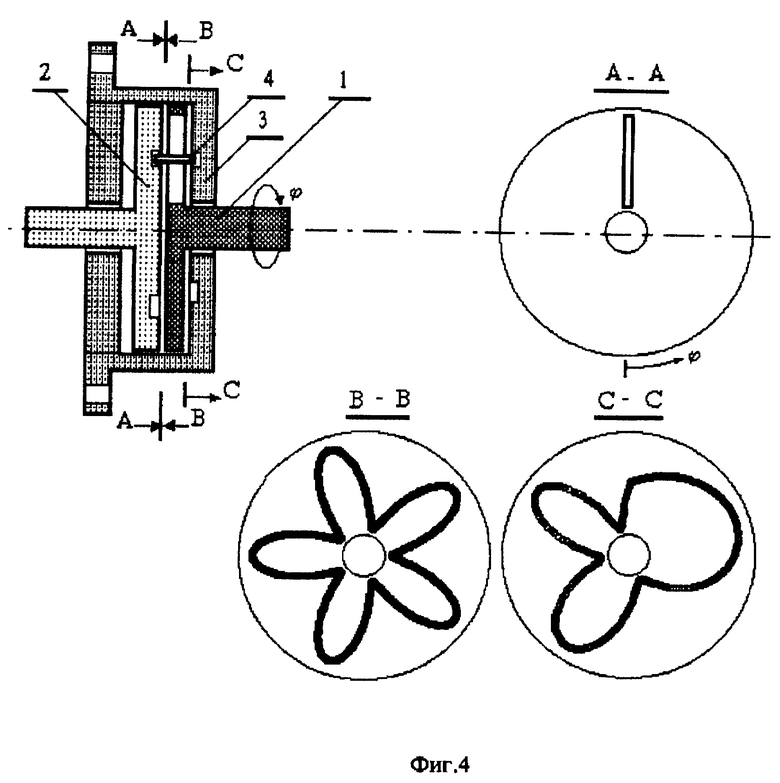
На Фиг. 3 представлен схематически составной соединительный элемент в плоской системе направляющих трех тел.
На Фиг.4 представлена дисковая передача вращения с двумя синусоидальными направляющими, одна из которых имеет переменный по углу период.
Цилиндрическая спиральная передача вращения (см. Фиг.1) состоит из ведущего цилиндрического тела 1 со спиральными направляющими, соосного с ним ведомого тела 2, которое имеет форму трубы с направляющей в виде продольного сквозного паза в одной из стенок, а также опорного тела 3, на внутренней цилиндрической поверхности которого расположена спиральная направляющая. В месте пересечения всех трех направляющих расположен соединительный элемент 4. Для обеспечения управления рабочими циклами передача имеет систему ввода соединительных элементов 5 и систему их вывода 6, которые связаны с органом управления 7. Здесь ϕ - угол поворота вокруг общей оси, x - координатная ось вдоль нее.
На Фиг. 2 в координатах (x, ϕ ) графически представлены положения направляющих в исходном состоянии: A1, B1 и C - положения для ведущего, ведомого и опорного тел соответственно. После поворота ведущего тела 1 на угол ϕ1 его направляющая занимает положение A2, соответственно ведомое тело 2 поворачивается на угол ϕ2 и его направляющая занимает положение B2. Здесь же в координатах (x, z) изображены графически два варианта программирования изменения коэффициента передачи z: линейный D1 и криволинейный D2, удовлетворяющие и тот и другой требованиям бесфрикционной муфты сцепления.
Представленный схематически на Фиг.3 соединительный элемент осуществляет связь между телами следующим образом. Колесо 8 соединительного элемента контактирует только с направляющей ведущего тела 1, а колеса 9 и 10 - с направляющими тел 2 и 3 соответственно, Положение самих колес относительно друг друга ограничено условием соосности.
На Фиг. 4 представлен дисковый вариант передачи вращения. Здесь ведущим телом является средний диск 1 с направляющей в виде радиальной прорези (см. проекцию A - A). Ведомый диск 2 и опорное тело 3 снабжены синусоидальными направляющими, как указано, соответственно на проекциях B - B и C - C, причем последняя имеет удлиняющийся период. Здесь ϕ - угол поворота ведущего тела 1, а 4 - соединительный элемент, изображенный схематично.
Устройство, представленное на Фиг. 1, работает следующим образом. При вращении ведущего тела 1 в сторону увеличения угла ϕ его спиральная направляющая вытесняет соединительный элемент 4 в направлении оси x, т.е. вдоль направляющей ведомого тела 2. При этом соединительный элемент 4, перемещаясь в спиральной направляющей опорного тела 3, вращает ведомое тело 2. Графически в координатах (ϕ,x) на Фиг.2 спирали с переменным шагом для тел 1 и 3 представлены кривыми A и C. Кривая C связана с опорным телом 3 и стоит на месте, а кривая A при повороте тела 1 на угол ϕ1 может перемещаться по координате ϕ из положение A1 в положение A2. При этом направляющая B ведомого тела 2 из положения B1 перемещается в положение B2 с поворотом на угол ϕ2. Конструктивный выбор шагов спиральных направляющих, т.е. кривых A и C, позволяет варьировать закон изменения передаточного отношения z в широких пределах, от линейного D1 до любого криволинейного, например D2. Данная передача работает циклически. Начало цикла и его конец определяются работой системы ввода 5 и системы вывода 6 соединительных элементов 4. Эти системы могут быть выполнены, например, как и в изобретении L.Mackta, но должны быть снабжены управляемыми перегородками, чтобы действовать по командам от органа управления 7.
Соединительный элемент, представленный на Фиг.3, выполняет те же функции, что и обычный шар. Однако во время движения колесо 8 катится только по направляющей тела 1, а колеса 9 и 10 - по направляющим тел 2 и 3 соответственно, что исключает трение скольжения, которое очень велико у шара.
Дисковая передача, представленная на Фиг. 4, работает аналогично цилиндрической передаче. Здесь ведущий средний диск 1 перемещает соединительный элемент 4 в синусоидальных направляющих тел 2 и 3. Там, где периоды синусоид отличаются мало, передаточное отношение z минимально, а с возрастанием разницы к концу цикла доходит до 1. По сравнению с передачей, представленной на Фиг.1, здесь имеются две принципиальных особенности. Во-первых, для исключения кинематических неопределенностей это устройство требует параллельного включения двух или более передач с разными начальными фазами синусоид, что усложняет весь механизм. Во-вторых, замкнутый характер направляющих позволяет обходиться без систем ввода и вывода соединительных элементов, что, наоборот, упрощает его. Что же касается таких конкретных характеристик, как количество оборотов тел вращения на цикл, то они зависят от выбора параметров направляющих и схемы их расположения с учетом того, что тела 1, 2 и 3 кинематически симметричны относительно их функциональных перестановок.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2084727C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174202C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2005 |
|
RU2279596C1 |
| АВТОМАТИЧЕСКАЯ ПЕРЕДАЧА Б.Ф.КОЧЕТКОВА | 1992 |
|
RU2029185C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174201C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2178107C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277653C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171931C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171930C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277656C1 |
Передача вращения направлена на снижение мощности в системе управления, повышение КПД и расширение функциональных возможностей. Каждое из тел вращения и опорное тело имеют направляющие, по крайней мере одна из которых периодическая по углу поворота. Периодическая направляющая имеет переменный по углу поворота период. По крайней мере один соединительный элемент помещен в направляющие трех тел одновременно. 4 з.п. ф-лы, 4 ил.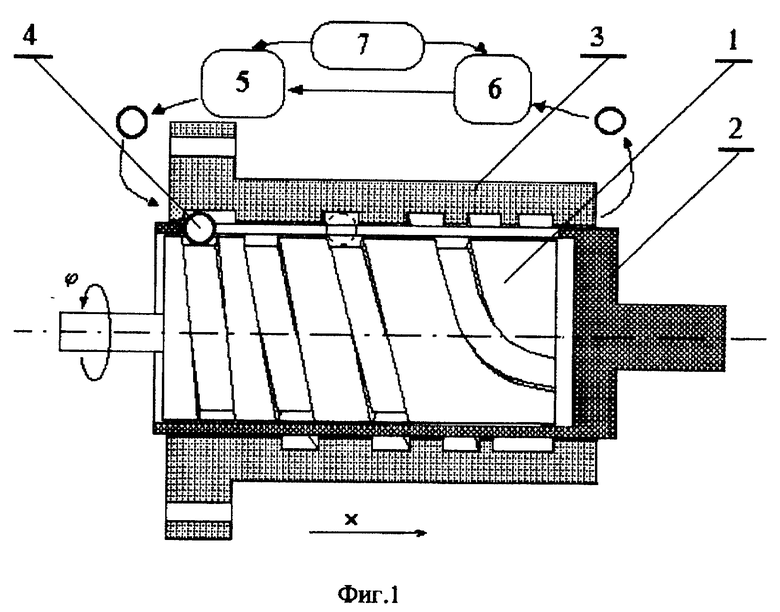
| DE, 236138, 1910, кл | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| US, 2764030, 25.09.56, кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
| SU, 605926, 14.10.75, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| SU, 1578401, 10.03.88, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
