Изобретение относится к общему машиностроению, в частности к передачам, и может быть использовано в транспортном машиностроении, преимущественно в автомобилестроении, а также в станкостроении.
Известна инерционная передача, содержащая установленное с возможностью вращения вокруг оси передачи водило с радиальными осями, размещенные по разные стороны от радиальных осей конические зубчатые центральные колеса, закрепленные на соосных ведущем и ведомом валах, конические зубчатые сателлиты, введенные в зацепление с центральными колесами и образующие с последними пары колес, и маховики, установленные на радиальных осях водила. Передача снабжена жестко соединенным с корпусом передачи опорным коническим зубчатым центральным колесом, установленными на радиальных осях водила сателлитами, жестко соединенными с маховиками и введенными в зацепление с опорным колесом, и установленными на осях водила по разные стороны от оси передачи сблокированными по два сателлитами, введенными порознь в зацепление с разными центральными колесами, при этом блоки сателлитов и сателлиты с маховиками размещены с возможностью независимого друг от друга вращения вокруг радиальных осей водила (см. патент РФ 2072715, МПК 6 F 16 Н 33/10, 3/74, 27.01.97, Бюл. №3).
Недостатком этой инерционной передачи является то, что при максимальной частоте вращения ведомого вала водило неподвижно и сателлиты не вращаются вокруг его радиальных осей, что сводит к минимуму величину передаваемого на ведомый вал вращающего момента.
Наиболее близкой по совокупности признаков является автоматическая бесступенчатая механическая передача, у которой на соосных ведущем и ведомом валах установлены соответственно ведущее и ведомое центральные зубчатые колеса, введенные в зацепление со сблокированными основными сателлитами, размещенными по разные стороны от линии оси передачи на радиальных осях водила, которое установлено на ведущем валу. На других радиальных осях водила размещены по разные стороны от линии оси передачи маховики, сблокированные с сателлитами, введенными в зацепление с опорным колесом, закрепленном на полом промежуточном валу, установленном коаксиально с ведущим валом с возможностью независимого от него вращения. Промежуточный вал связан с приводом опорного колеса, который содержит зубчатые колеса, установленные соответственно на ведущем и промежуточном валах и введенные в зацепление с промежуточным колесом, ось которого установлена в корпусе передачи. Центральные колеса размещены по разные стороны от радиальных осей водила (см. патент РФ 2171927, МПК 7 F 16 Н 33/14, 3/74, 10.08.2001, Бюл. №22).
Недостатком этой автоматической бесступенчатой механической передачи является размещение массивных сателлитов, выполняющих роль маховиков или инерционных грузов, в стороне от линии оси передачи, что приводит к возникновению больших центробежных сил при их вращении вокруг линии оси передачи и создает необходимость усиления всех элементов передачи с соответствующим усложнением устройства и увеличением их массы. В составе передачи имеется полый промежуточный вал, несущий закрепленные на нем два зубчатых колеса и установленный коаксиально с ведущим валом, что усложняет устройство указанной передачи, увеличивает его массу и размеры в осевом направлении.
Предлагаемое изобретение обеспечивает достижение технического результата, который заключается в уменьшении динамических нагрузок на элементы передачи с возможностью уменьшения при этом прочности этих элементов, а соответственно и их массы, уменьшении размеров и упрощении устройства передачи.
Указанный технический результат достигается тем, что автоматическая бесступенчатая механическая передача содержит соосные ведущий и ведомый валы, на которых установлены соответственно ведущее и ведомое центральные конические зубчатые колеса, введенные в зацепление с основными сателлитами, размещенными на радиальных валах водила с возможностью вращения относительно этих валов. Водило размещено соосно с ведущим и ведомым валами с возможностью независимого от них вращения. На радиальном валу водила размещен конический дополнительный сателлит, введенный в зацепление с опорным колесом, которое размещено на ведущем валу с возможностью вращения относительно этого вала. Упомянутое опорное колесо связано с приводом опорного колеса, содержащим зубчатые колеса, основное из которых установлено на ведущем валу и введено в зацепление с промежуточным колесом, ось которого размещена в корпусе передачи в стороне от линии оси передачи, а само промежуточное колесо имеет связь с опорным колесом. Ведущее и ведомое центральные колеса размещены по разные стороны от радиальных валов водила.
Согласно изобретению опорное колесо имеет два зубчатых венца, расположенных на противоположных сторонах диска колеса. Первый из упомянутых зубчатых венцов введен в зацепление с дополнительным сателлитом, а второй зубчатый венец введен в зацепление с промежуточным колесом привода опорного колеса, при этом опорное колесо размещено непосредственно на ведущем валу. Водило имеет упомянутые выше радиальные валы, проходящие в пределы совмещенного с линией оси передачи рамочного корпуса водила, внутри которого размещен инерционный груз в виде маховика водила, закрепленного на упомянутых радиальных валах водила. Рамочный корпус водила имеет соосные с ведущим и ведомым валами оси с возможностью вращения рамочного корпуса и водила в целом относительно и независимо от упомянутых ведущего и ведомого валов. Центр массы маховика водила совмещен с линией оси передачи. Дополнительный сателлит закреплен на конце радиального вала водила и уравновешен относительно линии оси передачи соответствующим грузом, расположенным на противоположном радиальном валу водила.
Как частный случай выполнения, привод опорного колеса содержит только конические зубчатые колеса, при этом ось промежуточного зубчатого колеса установлена в корпусе передачи под углом, в том числе под прямым углом, к линии оси передачи, а оба зубчатых венца опорного колеса выполнены также коническими.
Как частный случай выполнения, привод опорного колеса содержит цилиндрические зубчатые колеса, а ось промежуточного зубчатого колеса установлена в корпусе передачи параллельно линии оси передачи, при этом один зубчатый венец опорного колеса, входящий в зацепление с дополнительным сателлитом, выполнен коническим, а другой зубчатый венец опорного колеса, введенный в зацепление с промежуточным зубчатым колесом привода опорного колеса, выполнен цилиндрическим с внутренним зацеплением.
Основные сателлиты выполнены с массивными ободами.
Линия оси передачи и продольная линия валов маховика пересекаются в центральной точке, совмещенной с упомянутыми линиями.
Как частный случай выполнения, основные сателлиты выполнены в виде жестко соосно соединенных между собой в единый блок двух зубчатых конических колес, внутреннего и внешнего относительно линии оси передачи, одно из которых находится в зацеплении с ведущим колесом, а другое - с ведомым колесом, и указанные зацепляющиеся пары колес имеют разные по величине передаточные отношения.
Как частный случай выполнения, каждый из основных сателлитов выполнен в виде одного зубчатого колеса и находится в зацеплении одновременно с ведущим и ведомым колесами, образуя при этом с каждым из них пары колес, имеющие одинаковые по величине передаточные отношения.
Передача снабжена размещенным на линии оси передачи механизмом свободного хода, ведущий элемент которого связан с водилом или валами маховика водила, а ведомый элемент закреплен в корпусе передачи и не допускает вращения водила в направлении вращения ведомого вала.
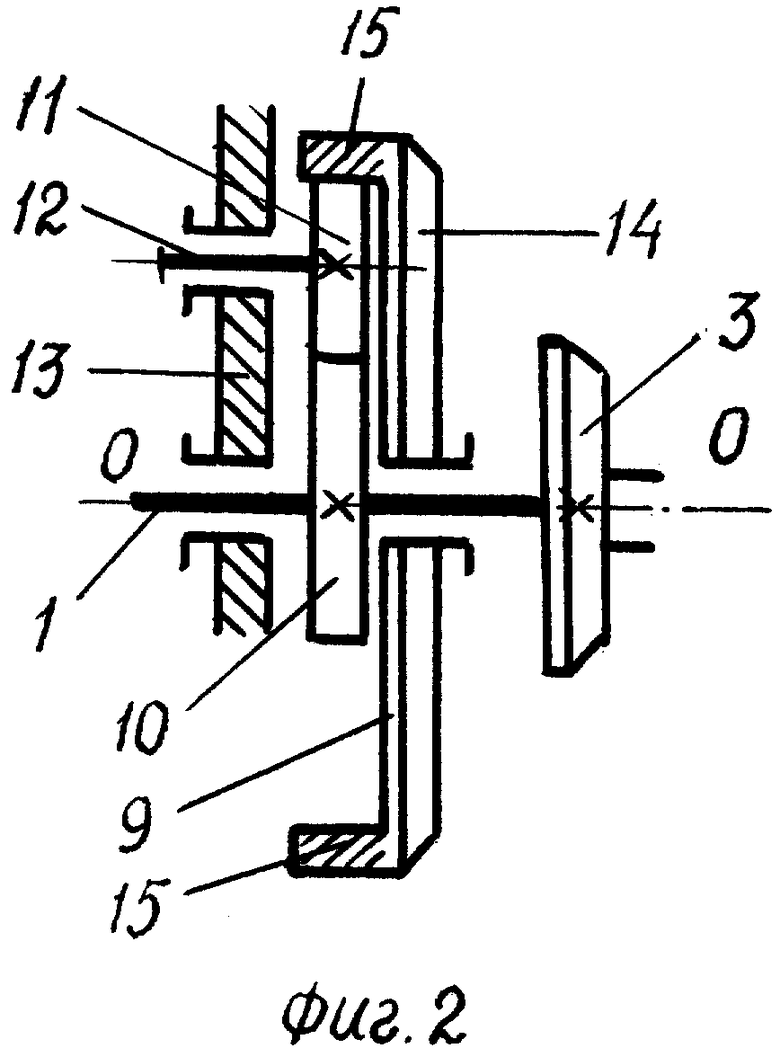
На чертеже фиг.1 показано в общем виде устройство автоматической бесступенчатой механической передачи. На фиг.2 дано изображение привода опорного колеса, выполненного, как частный случай, из цилиндрических зубчатых колес.
Автоматическая бесступенчатая механическая передача содержит соосные ведущий 1 и ведомый 2 валы, на которых установлены соответственно ведущее 3 и ведомое 4 центральные конические зубчатые колеса, введенные в зацепление с основными сателлитами 5, 6, размещенными на радиальных валах 7 водила с возможностью вращения относительно этих валов. Водило размещено соосно с ведущим 1 и ведомым 2 валами с возможностью независимого от них вращения. На радиальном валу 7 водила размещен конический дополнительный сателлит 8, введенный в зацепление с опорным колесом 9, которое размещено на ведущем валу с возможностью вращения относительно этого вала. Упомянутое опорное колесо связано с приводом опорного колеса, содержащим зубчатые колеса, основное 10 из которых установлено на ведущем валу и введено в зацепление с промежуточным колесом 11, ось 12 которого размещена в корпусе 13 передачи в стороне от линии оси О-О передачи, а само промежуточное колесо имеет связь с опорным колесом. Ведущее 3 и ведомое 4 центральные колеса размещены по разные стороны от радиальных валов водила. Опорное колесо 9 имеет два зубчатых венца, расположенных на противоположных сторонах диска колеса. Первый 14 из упомянутых зубчатых венцов введен в зацепление с дополнительным сателлитом 8, а второй 15 зубчатый венец введен в зацепление с промежуточным колесом 11 привода опорного колеса, при этом опорное колесо 9 размещено непосредственно на ведущем валу 1. Водило имеет упомянутые выше радиальные валы 7, проходящие в пределы совмещенного с линией оси О-О передачи рамочного корпуса 16 водила, внутри которого размещен инерционный груз в виде маховика 17 водила, закрепленного на упомянутых радиальных валах 7 водила, которые являются валами маховика 17. Рамочный корпус 16 водила имеет соосные с ведущим 1 и ведомым 2 валами оси 18 с возможностью вращения рамочного корпуса и водила в целом вместе с радиальными валами 7 и маховиком 17 относительно и независимо от упомянутых ведущего и ведомого валов. Центр массы маховика 17 водила совмещен с линией оси О-О передачи, дополнительный сателлит 8 закреплен на конце радиального вала 7 водила и уравновешен относительно линии оси О-О передачи соответствующим грузом 19, расположенным на противоположном радиальном валу водила.
Как частный случай выполнения, привод опорного колеса 9 содержит только конические зубчатые колеса (см. фиг.1), при этом ось 12 промежуточного зубчатого колеса 11 установлена в корпусе 13 передачи под углом, в том числе под прямым углом, к линии оси О-О передачи, а оба зубчатых венца опорного колеса выполнены также коническими.
Как частный случаи выполнения, привод опорного колеса 9 содержит цилиндрические зубчатые колеса (см. фиг.1), а ось 12 промежуточного зубчатого колеса 11 установлена в корпусе 13 передачи параллельно линии оси О-О передачи. При этом один зубчатый венец 14 опорного колеса, входящий в зацепление с дополнительным сателлитом 8, выполнен коническим, а другой зубчатый венец 15 опорного колеса, введенный в зацепление с промежуточным зубчатым колесом 11 привода опорного колеса, выполнен цилиндрическим с внутренним зацеплением.
Основные сателлиты выполнены с массивными ободами, что способствует увеличению момента количества движения при их вращении.
Линия оси О-О передачи и продольная линия О1-О1 валов маховика пересекаются в центральной точке О1, совмещенной с упомянутыми линиями.
Как частный случай выполнения, основные сателлиты 5, 6 выполнены в виде жестко соосно соединенных между собой в единый блок двух зубчатых конических колес, внутреннего 5 и внешнего 6 относительно линии оси О-О передачи, одно из которых 5 находится в зацеплении с ведущим колесом 3, а другое 6 - с ведомым колесом 4, и указанные зацепляющиеся пары колес имеют разные по величине передаточные отношения.
Как частный случай выполнения, каждый из основных сателлитов 5, 6 выполнен в виде одного зубчатого колеса и находится в зацеплении одновременно с ведущим 3 и ведомым 4 колесами, образуя при этом с каждым из них пары колес, имеющие одинаковые по величине передаточные отношения.
Груз, уравновешивающий дополнительный сателлит 8 относительно линии оси О-О передачи, прикреплен к концу вала 7 маховика и выполнен в виде диска с массивным ободом, наличие которого увеличивает момент количества движения при вращении указанного уравновешивающего груза 19.
Передача снабжена размещенным на линии оси О-О передачи механизмом свободного хода 20, ведущий элемент которого связан с водилом или валами 7 маховика, а ведомый элемент закреплен в корпусе 13 передачи и не допускает вращения водила в направлении вращения ведомого вала 2.
Автоматическая бесступенчатая механическая передача работает следующим образом.
При вращении ведущего вала 1 с ведущим центральным колесом 3 и неподвижном ведомом вале 2 в связи с приложенной к нему нагрузкой или началом вращения из неподвижного положения происходит вращение основных сателлитов 5, 6 вокруг продольной линии О1-О1 радиальных валов 7 водила, которые являются радиальными валами маховика 17. При этом внешние основные сателлиты 6 перекатываются по неподвижному ведомому центральному колесу 4 и вовлекают водило с маховиком 17, дополнительным сателлитом 8 и уравновешивающим грузом 19 во вращение вокруг линии оси О-О передачи в направлении вращения ведущего вала 1. Привод 10, 11 опорного колеса 9 обеспечивает постоянное вращение опорного колеса при любом режиме работы в противоположном направлении по сравнению с ведущим валом 1.
При этих условиях находящийся в зацеплении с опорным колесом 9 дополнительный сателлит 8 вместе с маховиком 17 и уравновешивающим грузом 19 совершает вращение вокруг продольной линии О1-О1 радиальных валов 7 с увеличенной частотой по сравнению с основными сателлитами 5, 6 и в противоположном направлении.
Одновременное вращение маховика 17, дополнительного сателлита 8 и уравновешивающего груза 19 вокруг двух пересекающихся осей - линии оси О-О передачи и продольной линии О1-О1 радиальных валов 7 равнозначно их вращению относительно центральной точки О пересечения этих линий. Известно, что вращающееся тело имеет определенный момент количества движения, который проявляется с соблюдением всеобщего закона сохранения, согласно которому момент количества движения может быть изменен только под воздействием внешних сил. Известно также, что момент количества движения при вращении тел относительно точки является векторной величиной. При указанном выше характере вращения маховика, дополнительного сателлита и уравновешивающего груза относительно центральной точки О1 векторы их моментов количества движения постоянно изменяют свое направление. Действия над векторами являются отражением соответствующих действий над векторными величинами.
Из сказанного следует, что проявление всеобщего закона сохранения момента количества движения противодействует вращению водила с его радиальными валами 7 вокруг линии оси О-О передачи. В связи с этим водило и его радиальные валы являются опорой для передачи вращающего момента от ведущего центрального колеса 3 через основные сателлиты 5, 6 на ведомое центральное колесо 4 и далее на ведомый вал 2.
При неподвижном ведомом центральном колесе 4 частота вращения дополнительного сателлита 8, маховика 17 и уравновешивающего груза 19 относительно центральной точки О1 является наибольшей. Частота вращения блоков основных сателлитов 6, 6 вокруг линии оси О-О передачи также является наибольшей. Следовательно, при данных условиях противодействие вращению радиальных валов 7 вокруг линии оси О-О передачи также будет максимальным, что обеспечит передачу на неподвижное ведомое центральное колесо 4 и далее на ведомый вал 2 максимального по величине момента силы. При этом обеспечивается возможность работы двигателя и вращения ведущего вала 1 при неподвижном ведомом вале 2. Внешней опорой для обеспечения передачи и преобразования вращающего момента в конечном счете является корпус 13 передачи, в котором установлена параллельная линии оси О-О передачи ось 12 промежуточного колеса 11 привода опорного колеса 9.
Из сказанного следует, что величина указанного выше тормозящего момента силы зависит от совокупной массы вращающихся маховика 17, дополнительного сателлита 8, уравновешивающего груза 19 и в определенной мере основных сателлитов 5, 6 и от частоты их вращения относительно центральной точки О, а также от передаточных отношений всех включенных в состав передачи пар колес. Этим определяются основные параметры передачи.
Под действием максимального по величине момента силы, приложенного к ведомому центральному колесу 4, оно начинает вращаться в противоположном направлении по сравнению с ведущим валом 1. Это приводит к замедлению вращения дополнительного сателлита 8, маховика 17 и уравновешивающего груза 19 вокруг линии оси О-О передачи и продольной линии О1-О1 радиальных валов 7, а следовательно, и относительно центральной точки О с соответствующим уменьшением тормозящего момента силы на водило. При этом величина передаваемого вращающего момента уменьшается в обратной зависимости от частоты вращения ведомого вала 2.
При максимальной частоте вращения ведомого вала 2 водило со всеми входящими в его состав элементами 7, 8, 17 и 19 вокруг линии оси О-О передачи не вращается. Однако и при этом к нему приложен тормозящий момент силы, обеспечивающий передачу вращающего момента на ведомое центральное колесо 4. Это обусловлено тем, что опорное колесо 9 постоянно вращается при любом режиме работы передачи и приводит во вращение дополнительный сателлит 8, маховик 17 и уравновешивающий груз 19 вокруг продольной линии О1-О1 радиальных валов 7. При этом блоки основных сателлитов также вращаются с максимальной частотой.
Устойчивость водила и его радиальных валов 7 при данном режиме работы обеспечивается тем, что даже при их незначительном повороте вокруг линии оси О-О передачи происходит изменение направления векторов моментов количества движения всех упомянутых выше вращающихся элементов водила с проявлением при этом всеобщего закона сохранения момента количества движения.
При необходимости передачи вращающего момента и вращения от ведомого вала 2 на ведущий вал 1 с целью торможения рабочей машины работа двигателя прекращается. При этом под воздействием вращающегося ведомого вала 2 происходит замыкание механизма свободного хода 20, который обеспечивает передачу потока мощности от вращающегося ведомого вала на ведущий вал и далее на двигатель, который оказывает сопротивление вращению его вала при неработающем режиме. Это же обеспечивает пуск двигателя путем буксировки рабочей машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2005 |
|
RU2277654C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277657C1 |
| ИНЕРЦИОННАЯ МУФТА | 1992 |
|
RU2047017C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277653C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277655C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2003 |
|
RU2247885C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171927C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 1999 |
|
RU2163317C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2003 |
|
RU2247274C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2172438C2 |
Изобретение относится к машиностроению, транспортному машиностроению, станкостроению. Передача содержит соосные ведущий 1 и ведомый 2 валы, ведущее 3 и ведомое 4 зубчатые колеса, водило с радиальными валами 7, основные сателлиты 5, 6, дополнительный сателлит 8, размещенные на радиальных валах 7 водила, маховик 17, уравновешивающий груз 19, опорное колесо 9, размещенное на ведущем валу с возможностью вращения относительно него и имеющее два зубчатых венца 14, 15. Зубчатый венец 14 зацеплен с дополнительным сателлитом 8. Зубчатый венец 15 зацеплен с промежуточным колесом 11 привода опорного колеса. Привод опорного колеса содержит основное колесо 10 и промежуточное колесо 11, ось 12 которого размещена в корпусе 13 передачи вне пределов линии оси О-О передачи. Ведущее и ведомое колеса размещены по разные стороны от радиальных валов. Технический результат - обеспечение широкого диапазона автоматического регулирования величины передаваемого вращающего момента и частоты вращения ведомого вала в зависимости от нагрузки. 8 з.п. ф-лы, 2 ил.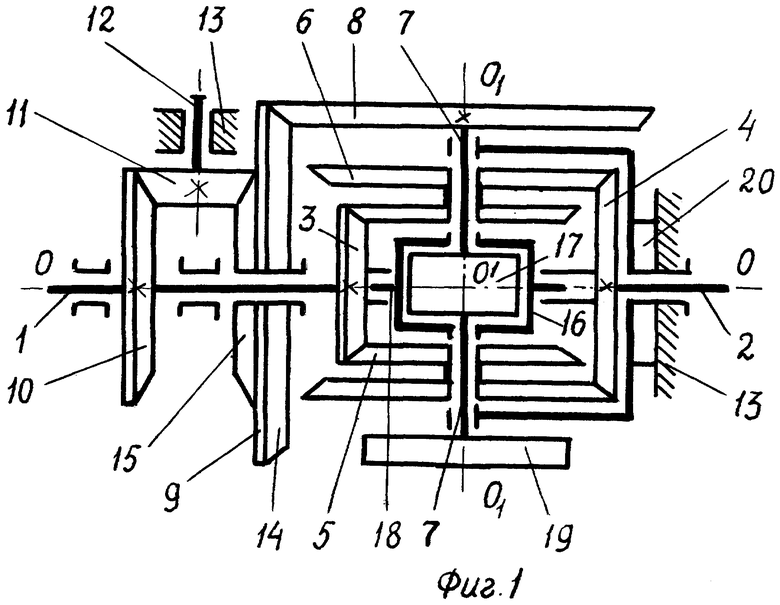
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171927C2 |
| ИНЕРЦИОННАЯ ПЕРЕДАЧА | 1994 |
|
RU2072715C1 |
| ИНЕРЦИОННАЯ МУФТА | 1992 |
|
RU2047017C1 |
| Планетарная прецессионная передача с выборной зазора | 1989 |
|
SU1703902A1 |
| Циклическая передача | 1981 |
|
SU981739A1 |
| В.Н.КУДРЯВЦЕВ | |||
| «Планетарные передачи» | |||
| М.-Л.: Машиностроение, 1966, с.39, рис.22б. | |||

