Изобретение относится к электротехнике, а именно, к торцевым электрическим машинам с короткозамкнутыми роторами или постоянными магнитами и двумя статорами и может найти применение в электроприводе промышленных роботов, транспорте, робокарах или в электрокарах и электромобилях.
Известно универсальное мотор-колесо с возбуждением от постоянных магнитов, содержащее два подшипниковых щита, закрепленных на внутренней поверхности подшипниковых щитов дисковые магнитопроводы с выступающими зубцами для размещения обмоток, между которыми с зазором размещены намагниченные аксиально постоянные магниты чередующейся полярности, установленные в держателе, а также колесо с ободом. /см. заявку PCT N 0 091/033385, B 60 K 7/00, фиг.5, 1991 г.
Недостатком известного мотор-колеса является наличие двух подвижных статоров.
Целью изобретения является устранение этого недостатка и повышение надежности.
В предлагаемых безредукторных мотор-колесах число пар полюсов должно быть p ≥ 7, что возможно только при обмотках, наматываемых с зубцовым шагом. Именно такие обмотки по форме получаются простыми с минимальным вылетом лобовых частей, прижатым к зубцам в максимальной мере.
Например, если мотор-колесо питается от сети переменного тока частотой f = 50 Гц и имеет высоту оси вращения h=150 мм для приемлемой линейной скорости v = 10 км/ч, что соответствует быстрой ходьбе человека, должно быть p = 13. Такое выполнение ротора вполне невозможно. Например, при тех же условиях но для v = 15 км/ч число пар полюсов p = 11. Следует отметить, что линейная скорость перемещения мотор-колеса зависит от высоты оси вращения. При уменьшении этой величины также удается уменьшить число пар полюсов. По крайней мере нет никаких проблем для конструирования ротора с большим p≥7 и для конструирования обмоток на такое большое число пар полюсов. Число пазов на полюс и фазу в таких обмотках должно быть меньше единицы  Как показывает опыт проектирования обмоток q < 1 это число должно лежать в пределах 1/2 - 1/3 для m = 3 и в пределах 1/4 - 1/6 для m = 6. Например, при p = 11 и при m = 3 число Z должно лежать в пределах 30 - 22. Это вполне выполнимо.
Как показывает опыт проектирования обмоток q < 1 это число должно лежать в пределах 1/2 - 1/3 для m = 3 и в пределах 1/4 - 1/6 для m = 6. Например, при p = 11 и при m = 3 число Z должно лежать в пределах 30 - 22. Это вполне выполнимо.
Таким образом, вполне промышленно выполнимо мотор-колесо торцевого типа с двумя статорами с зубцовыми обмотками на магнитопроводах с применением порошковой формовки. Магнитопровод имеет выступающие зубцы для обмоток, как показано на фиг. 1. Для фиксации обмоток можно предусмотреть ферромагнитные листы толщиной 0,5-1 мм как крайние фиксирующие детали. Для согласования моментов двух половин статоров обмотки статора сдвинуты по отношению друг к другу ровно на одно полюсное деление постоянных магнитов.
Конструкция предлагаемого безредуктороного двустороннего мотор-колеса ясна из эскиза фиг. 1.2
Как видно из чертежа, синхронный, асинхронный или вентильный мотор-колесо состоит из одного ротора, выполненного из прочной стали в виде ступиц. Одновременно ступицы 1 являются держателями постоянных магнитов 2, расположенных между ступицами 1. Ступицы переходят в обод 8, на который насажен резиновый корд 9, легко восстанавливаемый в процессе износа. Между подшипниковым щитом 3 и ступицей предусмотрены специальные окна для прохождения луча оптоэлектронной пары. Сами датчики и приемник оптоэлектронной пары расположены на внутренней стороне подшипниковых щитов 3. Подшипниковые щиты с подшипниками 4 крепятся к корпусу 5. Корпус выполнен открытым в секторе 35 - 40o со стороны поверхности качения - пола для соприкосновения и качения колеса. На внутренней стороне подшипниковых щитов 3 закреплены два дисковых магнитопровода 6 из электротехнической стали или из порошкового магнитопровода. На зубцах выступах магнитопровода расположена зубцовая обмотка 7 с q < 1 Мотор-колесо скомпановано из прочной стали для корпуса 5, подшипниковых щитов 3, а колесо вращается на валу 10 в подшипниках 4.
Между подшипниковым щитом и ступицей в окна проходит луч оптоэлектронной пары. На кольце с внутренней стороны левого подшипникового щита расположен оптодатчик, а на таком же кольце правого щита расположен оптоприемник. Положение как приемника, так и датчика регулируемы поворотом кольца.
Мотор-колесо может работать в режиме питания как переменным током, так и постоянным током. В последнем случае обмотки соединены в многоугольник с включением в них управляемых полупроводниковых элементов. Направление вращения на постоянном токе определяется полярностью напряжения, и на переменном токе - порядком чередования фаз. Ротор асинхронного мотор-колеса состоит из ступиц и заполненных между ними порошкового магнитопровода. Во время трогания с места ступицы являются мощной клеткой. Для улучшения пускового режима статор может быть включен по 6 или 12-фазной схеме. При работе на переменном токе оптопара является простым счетчиком частоты вращения.
При работе на постоянном токе оптопара является датчиком положения ротора и определителем полярности полюсов и находится между полюсами. Сигнал с оптодатчиков может быть усилен при значительных мощностях и моментах. В ступицах колеса расположены аксиально постоянные магниты чередующейся полярности.
При питании от сети переменного тока частота перемагничивания магнитопровода f = 50 Гц. При использовании мотор-колеса в электромобилях с линейной скоростью v = 100 км/ч частота возрастает до 500 Гц. При таких частотах возникает проблема охлаждения мотор-колеса. Для этой цели магнитопровод с обмоткой статора со всеми управляемыми полупроводниковыми элементами может помещен в специальную капсулу, состоящую из двух частей при одном роторе. Капсулы заполняются специальной смесью из трансформаторного масла с керосином для уменьшения вязкости. Все утилизированное тепло может быть подано на обогрев салона и лобового стекла, с принудительной или естественной циркуляцией.
В условиях использования таких мотор-колес в электромобилях в целях дробления мощности можно использовать двойные, тройные секции. Например, двойные секции мотор-колеса состоят из двух роторов и из четырех статоров с магнитопроводами и обмотками, причем средние части магнитопроводов на общем подшипниковом щите могут быть капсулированы в общую капсулу. При мощности 20 кВт одна секция мотор-колеса на одну сторону имеет мощность 10 кВт, а при двухсекционном исполнении только 5 кВт. При гибридном исполнении дизель-двигатель может быть сочленен с маховиком генератором такой же конструкции, но без корда и с выпрямителями. Выпрямленное напряжение подается в борт сети постоянного тока и работает совместно с аккумуляторной батареей. Мощность такого дизель генераторного устройства может быть уменьшена в полтора-два раза. При такой компановке полностью отпадает необходимость в маховике с коробкой передач, в карданной трансмиссии и заднего моста с дифференциалом. Даже пропадает необходимость в рулевой колонке, ибо изменения направления движения можно достичь форсировкой и торможением правых и левых колес или наоборот.
Наиболее трудным в техническом отношении является сохранение двустороннего воздушного зазора между ротором и двумя статорами. Для защиты этого зазора от пыли и грязи следует предусмотреть лабиринтные канавки между ободом и магнитопроводом с нижней, открытой части мотор-колеса в секторе 40 - 50o. Таким образом происходит двойное капсулирование мотор-колеса.
При жесткой конструкции внешней капсулы и при использовании мощных амортизаторов подвески (верхней или боковой) корпус мотор-колесо будет перемещаться только в вертикальной плоскости, сохраняя двусторонний воздушный зазор.
При достаточной доработке конструкции мотор-колесо можно перейти к абсолютно экологически чистым конструкциям электромобилей без двигателей внутреннего сгорания с использованием энергии лобового сопротивления, спуска и подъема профиля дороги и энергии солнечных батарей на поверхности кузова.
Принцип действия и функционирования мотор - колеса.
При подаче на зубцовые обмотки перемешанного шестифазного напряжения и при соответствующей ориентации двух половин статоров с целью согласования моментов двусторонее вращающееся магнитное поле увлекает за собой дисковый ротор. Дисковый ротор мотор-колесо имеет порошковый магнитопровод и в этом порошковом магнитопроводе будут расположены ступицы, стержни замкнутые накоротко втулкой и ободом мотор-колеса.
При питании переменным током двух половин статоров ротор-диск мотор-колеса может быть выполнен на постоянных магнитах, помещенных в промежутках ступиц колес постоянных магнитов чередующейся полярности. Для согласования моментов статоры с зубцовыми отботками должны быть сдвинуты на одно полюсное деление. В этом случае мотор-колесо работает как двусторонний синхронный двигатель. Для облегчения пускового режима возможен шестифазный пуск и в постоянных магнитах можно предусмотреть канавки как пусковой решетки, которые одновременно могут служить для фиксации постоянных магнитов в пространстве между ступицами мотор-колеса. Пуск такого синхронного двигателя - асинхронный. Датчик положения - простой счетчик частоты вращения.
Мотор-колесо работает и как двигатель постоянного тока. На обмотку якоря, две половины которой так же сдвинуты на одно полюсное деление, в соответствии с полярностью и направлением вращения подается постоянное напряжение в соответствующий момент времени, определяемый датчиком положения ротора. При достаточном дроблении мощности сигнал от датчика положения ротора может непосредственно подавляться на управляемый полупроводниковый элемент, включающий данную зубцовую катушку. При больших мощностях необходимо промежуточное усиление сигнала. В этом случае мотор-колесо работает как двусторонний двигатель постоянного тока с питанием от борт-сети постоянного тока или от аккумуляторной батареи с управляемыми полупроводниковыми элементами.
По существу двигатель является вентильным дисковым двусторонним двигателем постоянного тока.
При линейной скорости автомобиля v = 200 км/ч или v = 55,4 м/с и при диаметре обода колеса d = 0,6 м частота вращения мотор-колеса  При этом частота токов в обмотке f=p•n-7•55=384 Гц. Как видно из расчетов, для транспортных средств еще достаточен запас по частоте. Обычно для транспортных средств частоту выбирают f=400 Гц.
При этом частота токов в обмотке f=p•n-7•55=384 Гц. Как видно из расчетов, для транспортных средств еще достаточен запас по частоте. Обычно для транспортных средств частоту выбирают f=400 Гц.
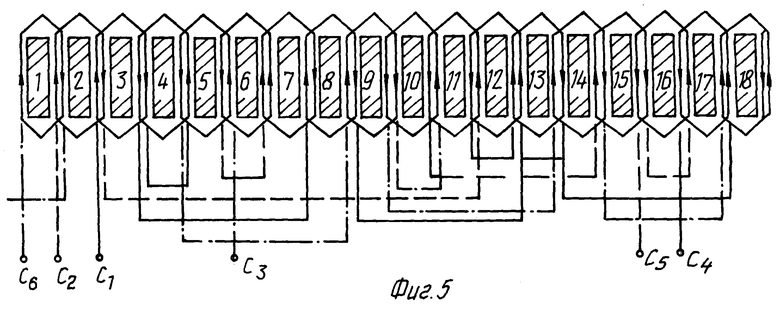
На фиг.5 показана схема 3 фазной обработки с зубцовым шагом.
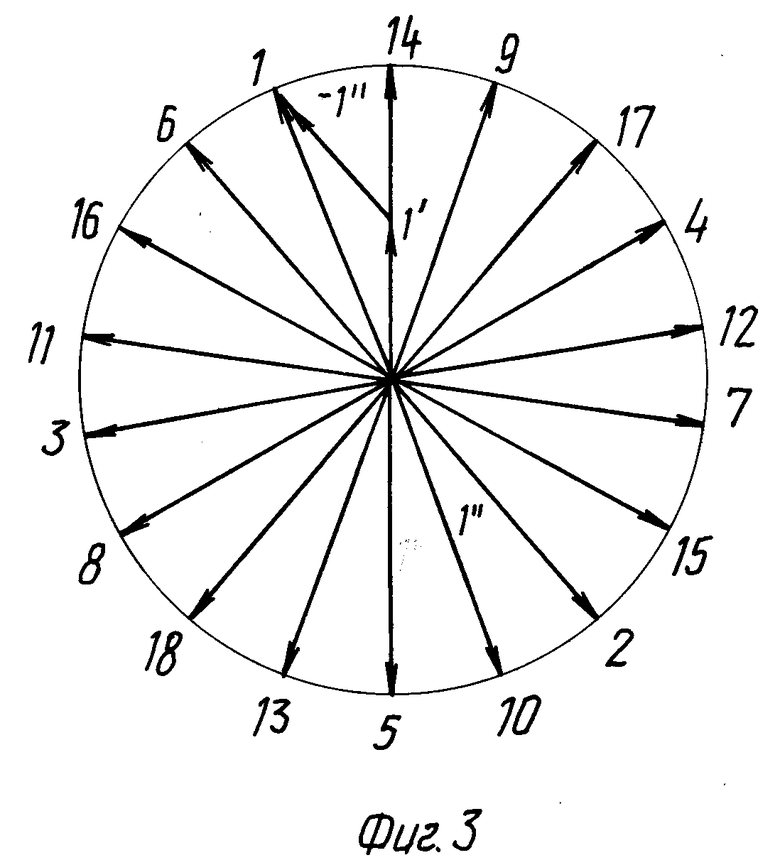
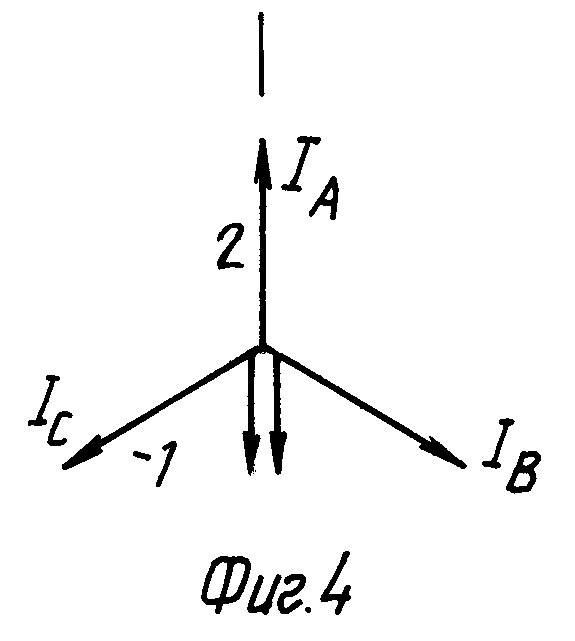
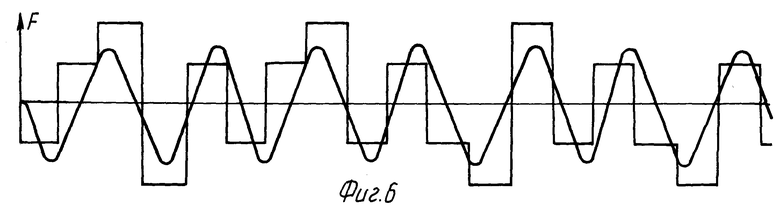
Соединение катушек A, B, C: фаза A - сплошная линия, фаза B - пунктирная линия, фаза C - штрихпунктирная линия. На фиг.3 показана векторная диаграмма токов фаз, а на фиг.4 пример построения векторов ЭДС катушек. Например, активные стороны катушки, лежащей на зубце 1 имеет вектор 1' и 1''. Сложением векторов 1' и -1'' образуется ЭДС катушки 1. При допущении, что ток в фазе A составляет две единицы тока, а в фазах B и C единица с отрицательным знаком, то на фиг.6 представлена ступенчатая кривая магнитодвижущей силы с выделением основной гармонической с 14 полосами, сто соответствует 14 брускам постоянных магнитов поочередной противоположной полярности полюсов. На фиг. 7 показано условно разрезанная и развернутая схема с направлениями токов в слоях.
При питании постоянным током в каждую катушку включаются управляемый и не управляемый полупроводниковые элементы. Сами катушки могут быть включены по схеме многолучевой звезды с нулем или по схеме многоконтурного многоугольника.
В двигательном режиме работают управляемые п/п элементы по сигналам датчиков опто-электронных пар, а в генераторном режиме - неуправляемые п/п элементы. Следовательно, мотор-колесо может работать как в двигательном, так и в генераторном режиме с рекуперацией электроэнергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ С ЖИДКОСТНЫМ ОХЛАЖДЕНИЕМ | 2010 |
|
RU2422969C1 |
| Дисковый вентильный двигатель индукторного типа с униполярным возбуждением | 2023 |
|
RU2821265C1 |
| Магнитоэлектрический моментный двигатель | 1989 |
|
SU1642557A1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2673587C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416861C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОМБИНИРОВАННЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2390086C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |


Использование: в транспортных средствах, автоматике. Сущность изобретения: ступицы 1 колеса с расположенными в них постоянными магнитами 2 являются источником многополюсного осевого магнитного поля. Двусторонний дисковый статор с зубцовыми обмотками 7, расположенными на выступах порошкового магнитопровода 6, крепятся на подшипниковых щитах 3 с двух сторон ротора. На внутренней поверхности подшипниковых щитов 3 расположены датчик и приемник оптопары. При работе на переменном токе оптопара является определителем направления вращения и датчиком частоты вращения. На постоянном токе оптопара является датчиком положения ротора, определителем направления вращения и полярности полюсов. На основе предложенных мотор-колес основывается концепция гибридных автомобилей без коробок передач, без механической трансмиссии, без мостов и дифференциалов и концепция электромобиля без двигателя внутреннего сгорания и даже без рулевой колонки. 6 з.п. ф-лы, 7 ил.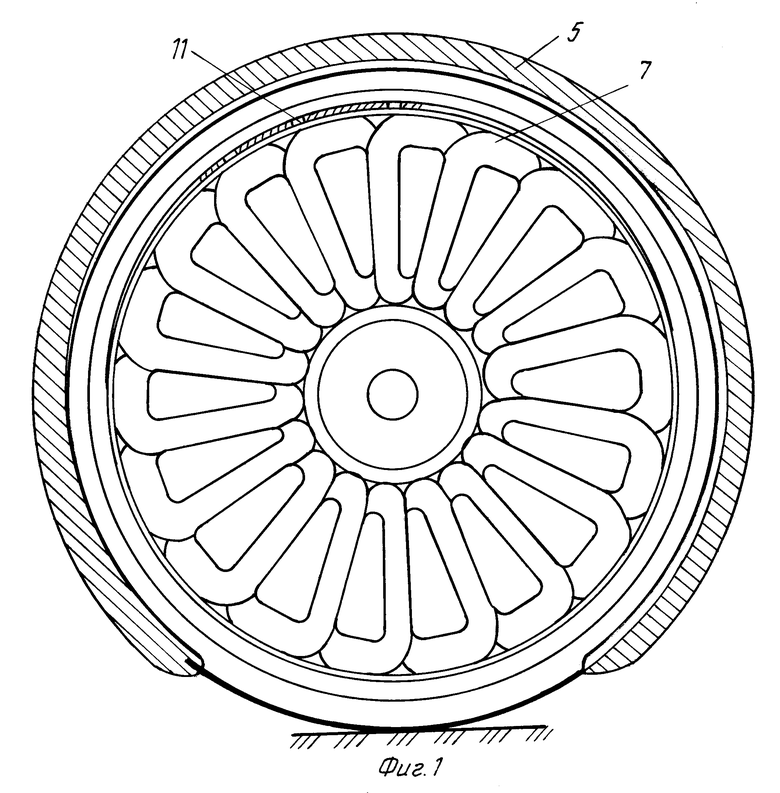
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Огнетушитель | 0 |
|
SU91A1 |
