Изобретение относится к электротехнике, в частности к низкооборотным высокомоментным электрическим двигателям, электроприводам и генераторам, касается конструктивного исполнения бесконтактных магнитоэлектрических машин с электромагнитной редукцией, и может быть использовано в системах автоматики, в качестве мотор-колес, мотор-барабанов, стартер-генераторов, электроусилителей руля, прямых приводов в бытовой технике (электромясорубки, электросоковыжималки, стиральные машины и пр.), электроприводов бетоносмесителей, грузоподъемных механизмов, ленточных транспортеров, насосов для перекачки жидкостей, механизмов с высокими моментами на валу и низкими частотами вращения вала, а также в качестве ветрогенераторов, гидрогенераторов, высокочастотных электрических генераторов и синхронных преобразователей частоты.
Известен бесколлекторный синхронный генератор с постоянными магнитами (Патент RU 2303849 С1, МПК Н02K 21/18, Н02K 21/14, автор Шкондин В.В.), содержащий, по крайней мере, одну круговую секцию, включающую ротор с круговым магнитопроводом, на котором с одинаковым шагом закреплено четное количество постоянных магнитов, образующих два параллельных ряда полюсов с продольно и поперечно чередующейся полярностью, статор, несущий четное число подковообразных электромагнитов, расположенных попарно напротив друг друга, устройство для выпрямления электрического тока, где каждый из электромагнитов имеет по две катушки с последовательно встречным направлением обмотки, при этом каждая из катушек электромагнитов расположена над одним из параллельных рядов полюсов ротора и количество полюсов в одном ряду n удовлетворяет соотношению n=10+4·k, где k - целое число, принимающее значения 0, 1, 2, 3 и т.д. Недостатком аналога является сложность конструкции и невысокие энергетические показатели, обусловленные нерациональным использованием полезного объема машины.
Известна индукторная электрическая машина (Патент RU 2009599 С1, МПК 5 Н02K 19/06, Н02K 19/24, авторы: Жуловян В.В.; Новокрещенов О.И.; Шаншуров Г.А.), содержащая явнополюсный с числом полюсов Z0 зубчатый статор с многофазной катушечной обмоткой, каждая катушка которой размещена на одном полюсе статора, безобмоточный ферромагнитный зубчатый ротор и преобразователь, к которому подключена обмотка статора, статор и ротор выполнены с четными и не равными друг другу числами зубцов и каждая фаза обмотки выполнена из р встречно включенных катушек, размещенных со сдвигом на двойное полюсное деление 2·τ, где 2·τ=Z0/p, р - число четное.
Известен синхронный редукторный двигатель (Патент RU 2054220 С1, МПК 6 Н02K 37/00, Н02K 19/06, авторы: Шевченко А.Ф.; Калужский Д.Л.), содержащий ротор с Zp зубцами и статор с 4·р полюсами (р=1, 2, 3, …), на внутренней поверхности которых выполнены элементарные зубцы по Zs зубцов на каждом полюсе, причем Zr=4·p·(Zs+K)±р (где K=0, 1, 2, … - целое число), в большие пазы между полюсами уложены катушки однофазной обмотки по одной на каждом полюсе, катушки, расположенные на одноименных полюсах с номерами, различающимися на 4, соединены последовательно "конец" с "началом" и образуют четыре ветви, "конец" первой ветви, образованной 1, 5, …, 1+4·(р-1) катушками, соединен с "началом" третьей ветви, образованной 3, 7, …, 3+4·(р-1) катушками, и точка соединения этих ветвей подключена к первому выводу обмотки, "конец" второй ветви, образованной 2, 6, …, 2+4·(р-1) катушками, соединен с "началом" четвертой ветви, образованной 4, 8, …, 4+4·(р-1) катушками и точка соединения этих ветвей через последовательно включенный конденсатор также подключена к первому выводу, а ко второму выводу подключены два диода таким образом, что с анодом первого из них соединены первая и четвертая ветви, а с катодом второго диода - вторая и третья ветви.
Недостатком описанной индукторной электрической машины и синхронного редукторного двигателя являются невысокие энергетические показатели. Кроме этого, указанные технические устройства чаще всего выполняют с малыми воздушными зазорами, что затрудняет их изготовление при массовом (серийном) производстве.
Известна сверхпроводниковая вентильная индукторная машина (Патент RU 2178942 С1, МПК 7 Н02K 55/00, Н02K 55/02, авторы: Ковалев Л.К., Илюшин К.В., Полтавец В.Н., Семенихин B.C., Пенкин В.Т., Ковалев К.Л., Егошкина Л.А., Ларионов А.Е., Конеев С.М.-А., Модестов К.А., Ларионов С.А.), содержащая статор с шихтованным сердечником, размещенную на его полюсных выступах многофазную катушечную обмотку, цилиндрический ротор, содержащий шихтованный сердечник с полюсными выступами, снабженная вторым статором с шихтованным сердечником, на полюсных выступах которого расположена многофазная катушечная обмотка, и вторым ротором, расположенным на одном валу с первым ротором, на валу между двумя роторами размещена цилиндрическая вставка из высокотемпературного сверхпроводникового (ВТСП) материала с «вмороженным» магнитным потоком, представляющая собой криомагнит, намагниченный в осевом направлении и обеспечивающий однополярность полюсных выступов первого и второго роторов, на статорах установлен соленоид, охватывающий вышеуказанную цилиндрическую вставку для «вмораживания» в нее магнитного потока, статоры соединены цилиндрическим магнитопроводом, а их многофазные катушечные обмотки снабжены коммутатором, обеспечивающим однополярность намагничивания полюсов каждого статора, разнополярность полюсов первого и второго статоров, совпадение направления магнитного потока в полюсах статоров с направлением магнитного потока вышеуказанной вставки, а также поочередность включения катушечных обмоток каждой фазы в заданной последовательности. Недостатком описанного технического устройства является сложность конструкции ротора, наличие двух статоров с соленоидом между ними, каждый статор имеет свою многофазную обмотку якоря, низкая ремонтопригодность при пробое какой-либо из обмоток из-за расположения всех обмоток (якоря и возбуждения) только на статоре, небольшой по сравнению с заявляемым изобретением удельный (отнесенный к массе активных материалов) момент на валу.
Известен, принятый за прототип, бесконтактный моментный электродвигатель (Патент RU 2285322 С1, МПК Н02К 21/00, автор Епифанов O.K.), содержащий магнитомягкий кольцевой пазовый статор с Р явно выраженными зубчатыми полюсами и с сосредоточенной m-фазной обмоткой якоря, выполненной в виде катушек, охватывающих полюса статора, и ротор, выполненный в виде двух соосно расположенных кольцевых зубчатых магнитомягких магнитопроводов ротора, развернутых относительно друг друга на половину своего зубцового деления, между которыми размещен кольцевой слой аксиально намагниченных в одном направлении постоянных магнитов, причем зубчатые полюса статора и зубчатые магнитопроводы ротора обращены друг к другу и разделены воздушным зазором δ, а зубцы на магнитопроводах ротора и на полюсах статора выполнены с равномерными и равными друг другу зубцовыми делениями TZ, ротор снабжен немагнитной втулкой толщиной, большей половины толщины bM слоя постоянных магнитов, на которой установлены и закреплены неподвижно относительно друг друга зубчатые магнитопроводы ротора равной друг другу активной осевой длиной Lp и кольцевой слой постоянных магнитов, при этом число m фаз m-фазной обмотки якоря выполнено кратным трем, определяемым как m=2f±1, где f равно 1, 2, 3,…, а явно выраженные зубчатые полюса на пазовом статоре расположены равномерно, при этом их число определяется как Р=2m·2s, где s равно 0, 1, 2,…, а на каждом зубчатом полюсе статора симметрично относительно его оси размещено нечетное число зубцов Zc толщиной bzc, при этом оси зубцов соседних зубчатых полюсов статора смещены относительно друг друга на величину, пропорциональную отношению ±Тz к m, причем соседние полюса статора разделены шлицом шириной bш не менее десятикратной величины воздушного зазора, определяемой из соотношения bш=Tz-[(1±1/m)-bzc/Tz], a число зубцов ZR на каждом из зубчатых магнитопроводов ротора выполнено кратным 2n при n, равном 2, 3, 4, …, определяемым как ZR=Р·(Zc±1/m), при этом толщина зубцов bzp каждого из зубчатых магнитопроводов ротора выполнена равной половине его зубцового деления Tz и связана с толщиной зубцов зубчатых полюсов статора bzc соотношением 2/3≤bzc/bzp≤1, а катушки обмотки якоря одной фазы, отстоящие друг от друга на число полюсных делений статора, равное числу m фаз, соединены последовательно-согласно, при этом активная осевая длина Lc кольцевого пазового статора с зубчатыми полюсами определяется из соотношения Lc=(2Lр+bм), причем кольцевые зубчатые магнитопроводы ротора расположены относительно кольцевого пазового статора аксиально симметрично. Недостатком прототипа является выполнение числа m фаз m-фазной обмотки якоря только кратным трем, числа явно выраженных зубчатых полюсов статора только четным, числа зубцов на каждом из зубчатых магнитопроводов ротора только кратным 2n при n, равном 2, 3, 4, …, числа зубцов, размещенных на каждом полюсе статора, только нечетным, толщины зубцов bzp каждого из зубчатых магнитопроводов ротора равной только половине его зубцового деления TZ, при этом питание m-фазной обмотки якоря осуществляется только от источника напряжения с таким же числом m фаз, что и у обмотки якоря. Это снижает возможные конструктивные исполнения данного технического устройства и возможности его использования.
Целью настоящего изобретения является создание при выполнении достаточно простой, надежной в эксплуатации, технологичной и высокоремонтопригодной с расширенными возможностями конструктивного исполнения и расширенными возможностями использования бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором при сохранении высоких энергетических показателей и большого удельного вращающего момента на валу при высокой электромагнитной редукции частоты вращения в режиме электрического двигателя и при большой удельной мощности и высокой электромагнитной редукции частоты ЭДС в режиме электрического генератора.
Задачей настоящего изобретения является оптимальный выбор числа полюсов якоря, общего числа зубцов якоря и числа зубцов индуктора при выполнении сосредоточенной на полюсах якоря m-фазной катушечной обмотки якоря бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором.
Техническим результатом настоящего изобретения является получение высоких эксплуатационных характеристик бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором. С этой целью статор содержит шихтованный сердечник якоря с явно выраженными полюсами, на внутренней поверхности которых выполнены элементарные зубцы, катушечную m-фазную обмотку якоря, каждая катушка которой размещена на соответствующем явно выраженном полюсе якоря, безобмоточный ферромагнитный ротор содержит индуктор с нечетными и четными зубчатыми сердечниками с одинаковым числом зубцов на каждом сердечнике, сердечники индуктора выполнены в виде пакетов, набранных из изолированных листов электротехнической стали с высокой магнитной проницаемостью, число сердечников индуктора не менее двух, длина крайних сердечников индуктора в аксиальном направлении одинакова, при наличии пакетов индуктора более двух, длина сердечников в аксиальном направлении, находящихся между крайними сердечниками индуктора, в два раза больше длины крайних сердечников, четные сердечники индуктора смещены относительно нечетных сердечников индуктора в тангенциальном направлении на половину зубцового деления индуктора, сердечники индуктора напрессованы на соответствующие втулки, выполненные из магнитомягкой стали с высокой магнитной проницаемостью и являющиеся магнитопроводами индуктора, которые крепятся к немагнитной втулке, толщина которой в радиальном направлении значительно больше величины воздушного зазора между статором и ротором, явно выраженные зубчатые полюса якоря и зубчатые сердечники индуктора обращены друг к другу и разделены воздушным зазором, между магнитопроводами индуктора расположены кольцевые слои аксиально намагниченных в одном направлении сегментарных постоянных магнитов, для машин с малыми диаметрами роторов возможно применение цельных кольцеобразных постоянных магнитов, постоянные магниты прилегают к магнитопроводам индуктора в аксиальном направлении и расположены таким образом, чтобы к втулкам с нечетными сердечниками прилегали постоянные магниты полюсами одной полярности, например, южной «S», а к втулкам с четными сердечниками прилегали постоянные магниты полюсами другой полярности, например, северной «N», число кольцевых слоев сегментарных постоянных магнитов на один меньше числа сердечников индуктора, ширина коронок зубцов сердечников индуктора определяется выражением bz2=k·tz2, a ширина коронок элементарных зубцов, расположенных на явно выраженных полюсах якоря, может определяться выражением bz1=k·tz1, а также, выражением bz1=k·tz2, при этом tz1 и tz2 представляют собой зубцовые деления явно выраженных полюсов якоря и сердечников индуктора соответственно, k=0,38÷0,5 и выбирается в зависимости от формы переменного тока якоря при работе машины в режиме электрического двигателя и от формы переменной ЭДС якоря при работе машины в режиме электрического генератора.
При применении бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором в качестве синхронного электрического двигателя питание обмотки якоря осуществляется:
- от источника трехфазного переменного напряжения,
- от источника однофазного переменного напряжения при помощи фазосдвигающего элемента,
- от m-фазного источника переменного напряжения постоянной частоты,
- от m-фазного источника переменного напряжения регулируемой частоты,
- от источника постоянного напряжения посредством управляемого инвертора, подающего синусоидальное напряжение на фазы обмотки якоря в зависимости от показаний датчика углового положения ротора для достижения максимального вращающего момента.
При применении бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором в качестве двигателя постоянного тока питание обмотки якоря осуществляется прямоугольными импульсами напряжения от электронного коммутатора по определенному алгоритму в зависимости от показаний датчика углового положения ротора для достижения максимального вращающего момента.
Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором может также работать в качестве синхронного m-фазного генератора синусоидальной ЭДС и в качестве синхронного m-фазного генератора переменной ЭДС прямоугольной формы без постоянной составляющей.
В настоящем изобретении индуктор является ротором, а якорь - статором. Возможны исполнения бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором с внешним якорем и внутренним индуктором, с внутренним якорем и внешним индуктором.
Сущность изобретения поясняется чертежами:
фиг.1 - общий вид бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором с внешним якорем и внутренним индуктором с тремя сердечниками индуктора,
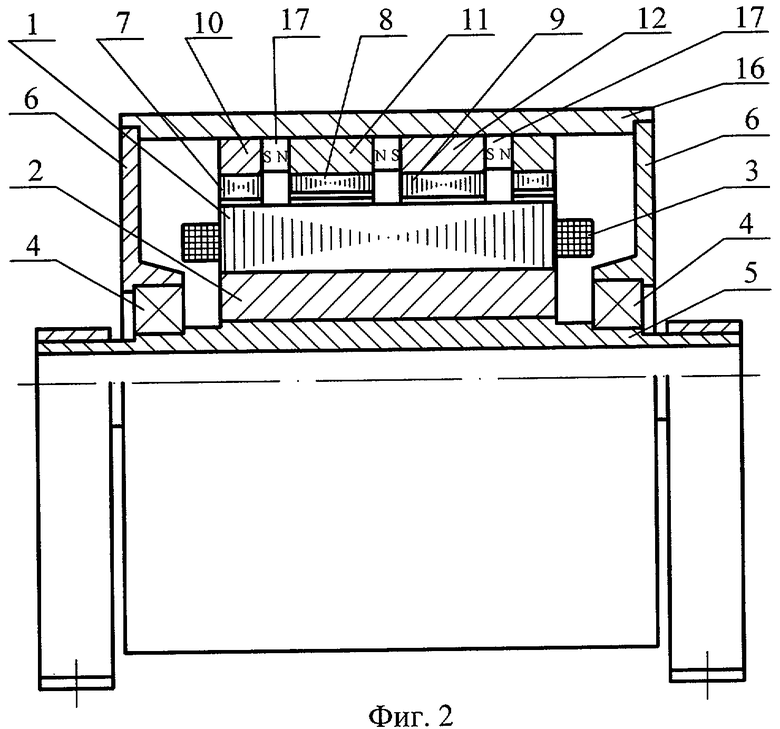
фиг.2 - общий вид бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором с внутренним якорем и внешним индуктором с четырьмя сердечниками индуктора,
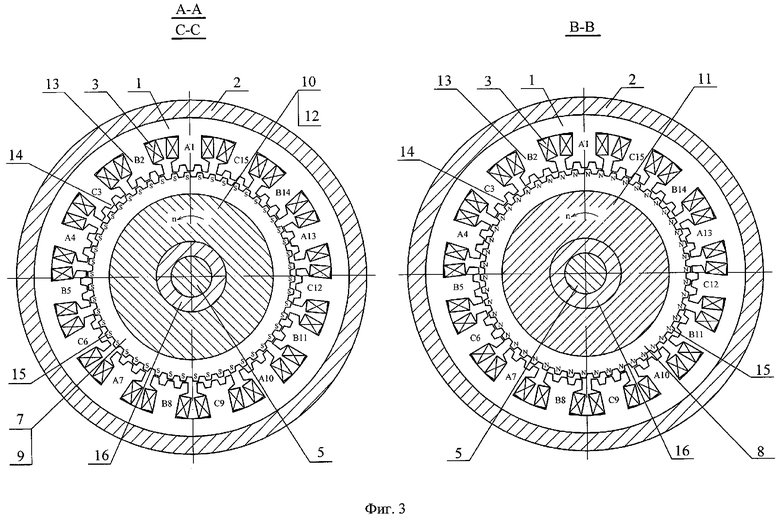
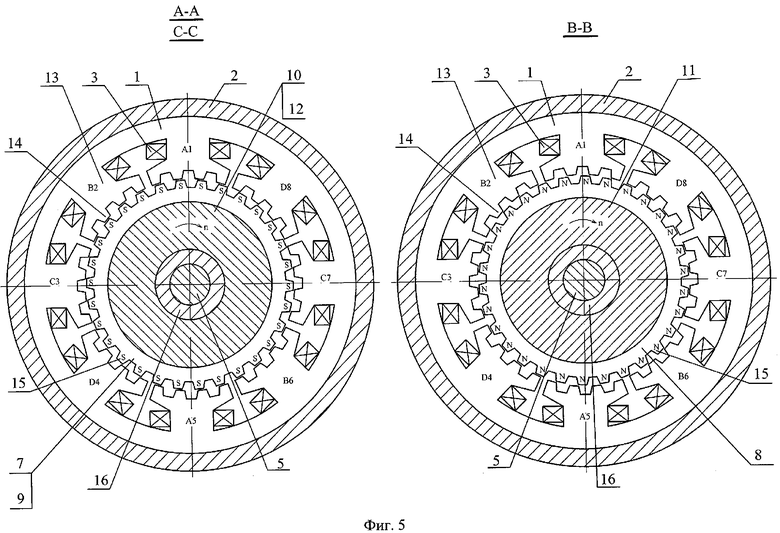
фиг.3÷15 - примеры реализации изобретения в виде поперечных сечений сердечников якоря и индуктора, схем соединения катушек m-фазных обмоток якоря и включение m-фазных обмоток якоря на источники напряжений с различным числом фаз и диаграмм токов (МДС).
В соответствии с настоящим изобретением для получения наилучших энергетических показателей при максимальном удельном моменте на валу бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором число явно выраженных полюсов якоря Zlp, число элементарных зубцов на явно выраженном полюсе якоря Zls=1, 2, 3, 4 …, число фаз m-фазной обмотки якоря m=3, 4, 5, 6 …, число явно выраженных полюсов якоря в фазе Zlm=1, 2, 3, 4 …, общее число зубцов якоря Z1, число зубцов на каждом сердечнике индуктора Z2 связаны равенствами (1), (2), (3):



Катушки m-фазной обмотки якоря в фазе должны быть соединены между собой таким образом (согласно или встречно), чтобы векторы наведенных в них ЭДС, геометрически складываясь, образовывали максимальную суммарную ЭДС фазы якоря бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором.
На фиг.3÷15 представлены примеры реализации изобретения в соответствии с формулами (1), (2), (3) в виде поперечных сечений сердечника якоря и нечетных и четного сердечников индуктора бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором, схем соединения катушек m-фазных обмоток якоря при включении m-фазных обмоток якоря в двигательном режиме на источники напряжений с различным числом фаз и диаграмм токов (МДС). Соответствие фигур поперечных сечений сердечника якоря и нечетных и четного сердечников индуктора и схем соединения катушек m-фазных обмоток якоря поясняется в таблице 1. Буква m в таблице 1 обозначает количество фаз m-фазной обмотки якоря бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором, а mист - количество фаз источника напряжения. Положение нечетных и четного сердечников индуктора относительно сердечника якоря на фигуре в двигательном режиме соответствует моменту времени, при котором показано положение векторов токов на соответствующей схеме соединения катушек m-фазной обмотки якоря бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором (таблица 1).
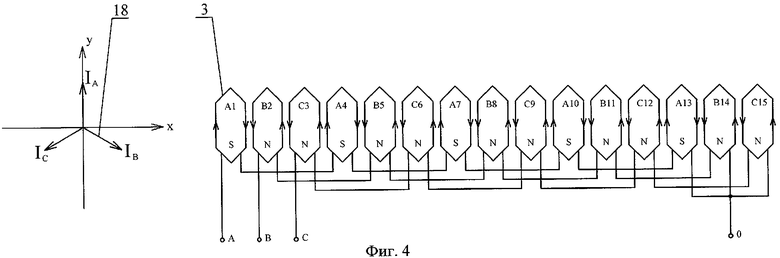
На фиг.4 представлена схема соединений катушек 3-фазной обмотки якоря с подключением на 3-фазный источник напряжения.
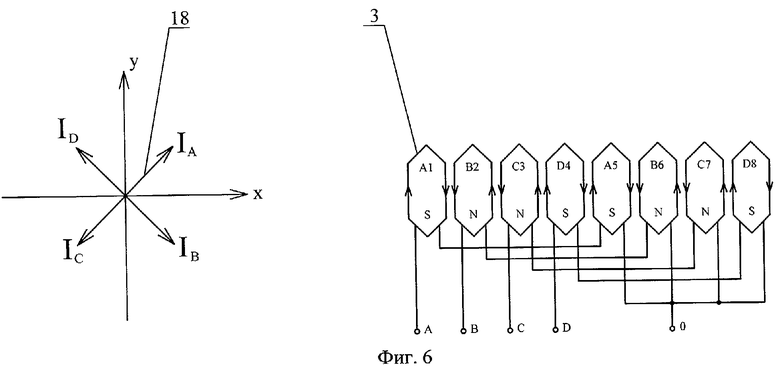
На фиг.6 представлена схема соединений катушек 4-фазной обмотки якоря с подключением на 4-фазный источник напряжения.
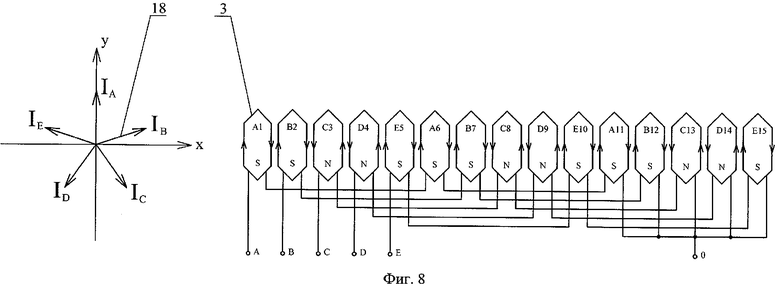
На фиг.8 представлена схема соединений катушек 5-фазной обмотки якоря с подключением на 5-фазный источник напряжения.
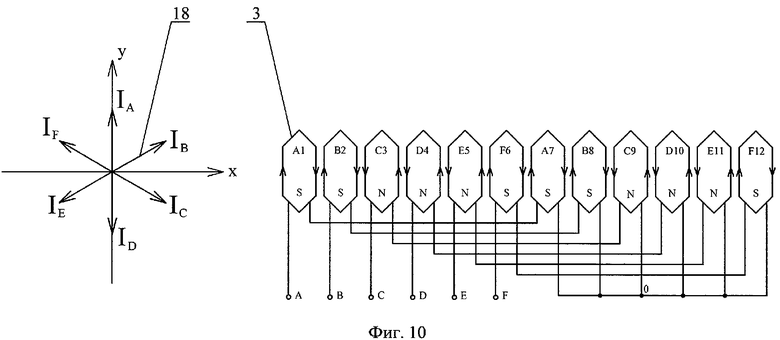
На фиг.10 представлена схема соединений катушек 6-фазной обмотки якоря с подключением на 6-фазный источник напряжения.
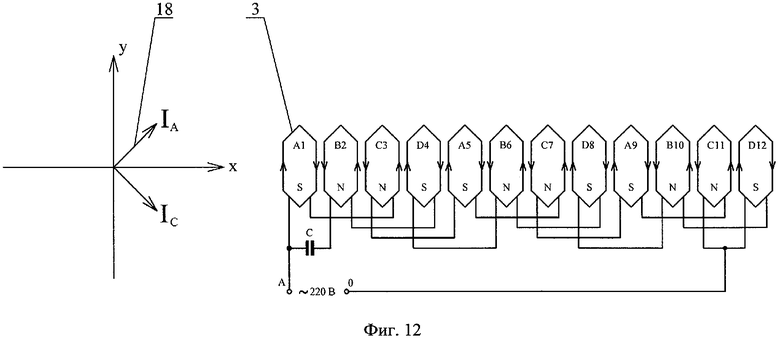
На фиг.12 представлена схема соединений катушек 4-фазной обмотки якоря с подключением в однофазную сеть переменного тока промышленной частоты. Сдвиг фаз источника напряжения, необходимый для работоспособности машины, обеспечивается при помощи фазосдвигающего элемента, в данном случае при помощи емкости С. При этом wAN - это числа витков катушек обмотки якоря, подключенных непосредственно к фазе «А» и нулю, wCN - это числа витков катушек обмотки якоря, подключенных к фазе «А» и нулю через фазосдвигающую емкость С. Коэффициент трансформации обмоток фаз якоря лежит в пределах kтp=wCN/wAN=1÷2.
Таблица 1
Соответствие фигур чертежей поперечных сечений сердечника якоря, нечетных и четных сердечников индуктора и фигур схем соединения катушек m-фазных обмоток якоря
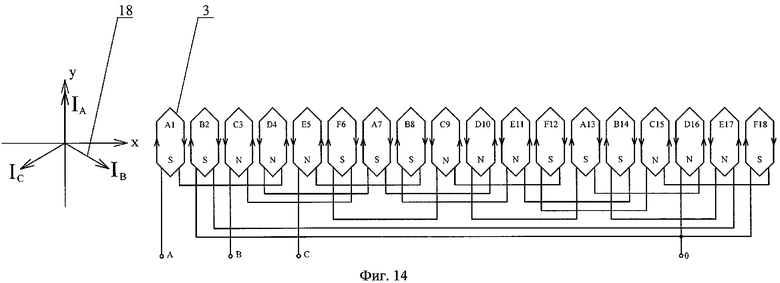
На фиг.14 представлена схема соединений катушек 6-фазной обмотки якоря с подключением на 3-фазный источник напряжения.
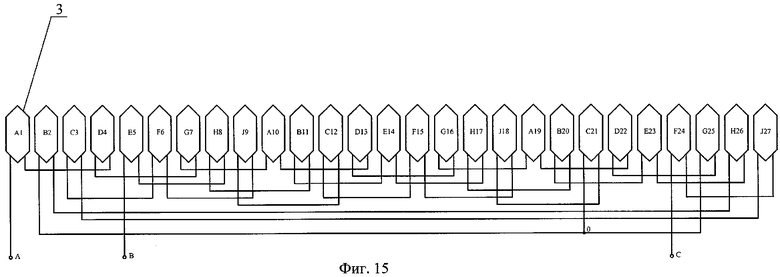
На фиг.15 представлена схема соединений катушек 9-фазной обмотки якоря с подключением на 3-фазный источник напряжения.
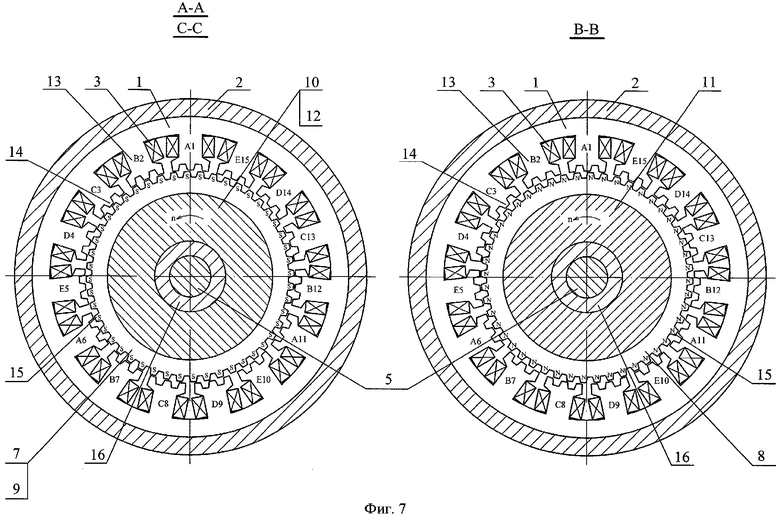
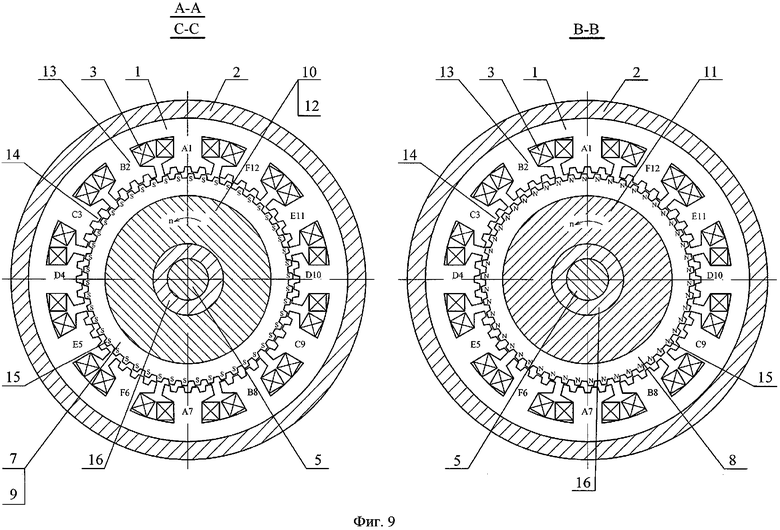
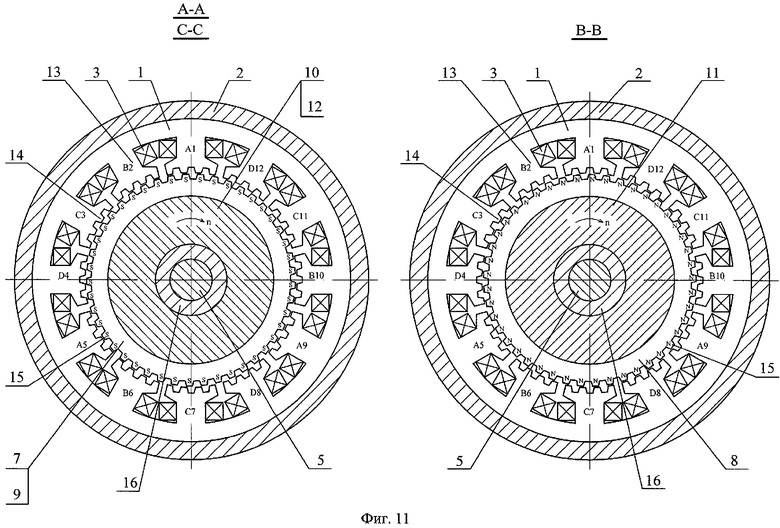
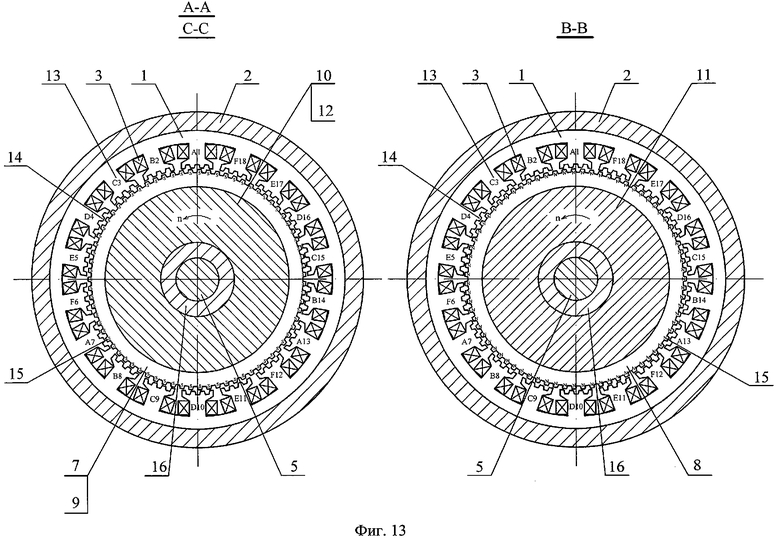
Рассмотрим конструкцию бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором с внешним якорем и внутренним индуктором (фиг.1, 3, 5, 7, 9, 11, 13). Перемагничиваемый с высокой частотой сердечник 1 якоря выполнен шихтованным из электротехнической стали с высокой магнитной проницаемостью и запрессован в магнитопроводе 2, являющегося корпусом, выполненного из стали с высокой магнитной проницаемостью. На каждом явно выраженном полюсе 13 якоря выполнены элементарные зубцы 14. На явно выраженных полюсах 13 якоря размещена катушечная m-фазная обмотка 3 якоря. Катушки m-фазной обмотки 3 якоря выполняются из обмоточного медного провода или медной обмоточной шины. Индуктор при помощи подшипников 4, вала 5 и подшипниковых щитов 6 позиционирован относительно якоря. Вал 5 выполнен из магнитной или немагнитной стали или из титана. Если вал 5 магнитный, то на нем закреплена немагнитная втулка 16, толщина которой в радиальном направлении значительно превышает воздушный зазор между статором и ротором. Немагнитная втулка 16 может быть выполнена из сплавов алюминия, из меди, из титана, из нержавеющей стали. Если вал 5 выполнен из немагнитной стали или титана, то немагнитная втулка 16 может не устанавливаться. На немагнитной втулке 16 насажены втулки 10, 11 и 12, выполненные из магнитомягкой стали с высокой магнитной проницаемостью и являющиеся магнитопроводами индуктора, на втулках 10 и 12 напрессованы соответственно нечетные 7 и 9 сердечники индуктора, на втулке 11 напрессован четный сердечник 8 индуктора. Длина двух крайних сердечников 7 и 9 индуктора в аксиальном направлении одинакова, длина находящегося между ними сердечника 8 индуктора в два раза больше длины крайних сердечников 7 и 9. Сердечники 7, 8 и 9 индуктора представляют собой пакеты, набранные из изолированных листов электротехнической стали с высокой магнитной проницаемостью, и имеют одинаковое число на каждом сердечнике равномерно распределенных по окружности зубцов 15. С целью удешевления конструкции сердечники 7, 8 и 9 могут быть выполнены металлообработкой из цельных кусков стали с высокой магнитной проницаемостью. В этом случае втулки 10, 11 и 12 не устанавливаются. Четный 8 сердечник индуктора смещен относительно нечетных 7 и 9 сердечников индуктора в тангенциальном направлении на половину зубцового деления tz2 индуктора. Между магнитопроводами 10, 11 и 12 индуктора расположены кольцевые слои аксиально намагниченных в одном направлении сегментарных постоянных магнитов 17. Для машин с малыми диаметрами роторов возможно применение цельных кольцеобразных постоянных магнитов 17. Постоянные магниты 17 прилегают к магнитопроводам 10, 11 и 12 индуктора в аксиальном направлении и расположены таким образом, что к втулкам 10 и 12 с нечетными 7 и 9 сердечниками индуктора соответственно постоянные магниты прилегают южными полюсами «S», а к втулке 17 с четным сердечником 8 индуктора соответственно постоянные магниты прилегают северными полюсами «N», вследствие этого зубцы нечетных 7 и 9 сердечников индуктора намагничены как южные полюса «S», а зубцы четного сердечника 8 индуктора намагничены как северные полюса «N>. Число кольцевых слоев сегментарных постоянных магнитов при этом на один меньше числа сердечников индуктора. Созданный постоянными магнитами 17 магнитный поток замыкается униполярно через сердечники и магнитопроводы индуктора, воздушный зазор между якорем и индуктором и через сердечник и магнитопровод якоря.
В случае конструкции бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором с внутренним якорем и внешним индуктором (фиг.2) роль корпуса играет немагнитная втулка 16.
Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором работает в двигательном и генераторном режимах.
Рассмотрим двигательный режим (фиг.1, 3, 5, 7, 9, 11, 13). Возбуждение индуктора создается кольцевыми слоями сегментарных постоянных магнитов 17. При этом образуется постоянное магнитное поле индуктора с постоянной во времени МДС индуктора и постоянным магнитным потоком индуктора, униполярно замыкающимся через сердечники индуктора 7, 8 и 9, магнитопроводы 10, 11, 12 индуктора, воздушный зазор между якорем и индуктором, сердечник 1 якоря и магнитопровод 2 якоря. Зубцы 15 нечетных сердечников 7 и 9 индуктора намагничиваются и образуют полюса одной полярности, например, южные полюса «S», а зубцы 15 четного сердечника 8 индуктора намагничиваются и образуют полюса другой полярности, например, северные полюса «N». На фазы m-фазной обмотки 3 якоря подают переменное напряжение, по m-фазной обмотке 3 якоря протекает переменный ток, создающий переменное магнитное поле якоря. При этом образуется переменная во времени МДС якоря и переменный во времени магнитный поток якоря. На фиг.4, фиг.6, фиг.8, фиг.10, фиг.12, фиг.14 представлены векторные диаграммы токов 18 источников питания для соответствующих m-фазных обмоток 3 якоря, представленных на этих же фигурах. Симметричные m-фазные напряжения, поданные на зажимы m-фазных обмоток 3 якоря, изменяются во времени, и векторы токов 18 поворачиваются в осях координат ху против часовой стрелки. Рассмотрим момент времени, когда токи проецируются на ось ординат. Катушки m-фазной обмотки 3 якоря названы буквой, обозначающей принадлежность к соответствующей фазе, и цифрой, обозначающей номер явно выраженного полюса 13 сердечника 1 якоря. Например, катушка В2 - катушка фазы В, расположенная на втором явно выраженном полюсе 13 сердечника 1 якоря. На фиг.4, 6, 8, 10, 12, 14 обозначены направления токов в катушках m-фазной обмотки якоря в соответствии с проекцией векторов токов на ось у. При этом элементарные зубцы 14, расположенные на соответствующих явно выраженных полюсах 13 якоря, на которых расположены катушки m-фазной обмотки 3 якоря, образуют южные полюса «S» и северные полюса «N». Вследствие взаимодействия переменного магнитного поля якоря с постоянным магнитным полем индуктора к ротору приложен однонаправленный в течение всего времени работы электрического двигателя вращающий момент, т.е. при изменении питающих m-фазных напряжений, поданных на m-фазную обмотку якоря с частотой ƒ (Гц), ротор вращается с синхронной частотой вращения n=60·ƒ/Z2 (об/мин). Направление вращения ротора на фигурах показано стрелкой с буквой «n». При Z1<Z2 ротор вращается согласно с магнитным полем якоря, а при Z1>Z2 ротор вращается против вращения магнитного поля якоря.
Рассмотрим генераторный режим (фиг.1, фиг.3, фиг.5, фиг.7, фиг.9, фиг.11, фиг.13). При вращении ротора сторонним источником момента с частотой вращения n постоянный магнитный поток индуктора, созданный кольцевыми слоями сегментарных постоянных магнитов 17, пронизывает воздушный зазор и явно выраженные полюса 13 якоря то со стороны индуктора, то со стороны якоря, создавая при этом в явно выраженных полюсах 13 якоря переменный магнитный поток, наводящий в катушках m-фазной обмотки 3 якоря переменную во времени ЭДС. Если внешняя цепь - цепь нагрузки замкнута, то по m-фазной обмотке 3 якоря протекает переменный электрический ток, электрическая мощность отдается потребителю.
Фазы m-фазной обмотки якоря могут быть соединены в звезду, а также в многоугольник.
Изобретение относится к области электротехники, в частности к низкооборотным высокомоментным электрическим двигателям, электроприводам и генераторам, касается особенностей конструктивного исполнения бесконтактных магнитоэлектрических электрических машин с электромагнитной редукцией и может быть использовано в системах автоматики, в качестве мотор-колес, мотор-барабанов, стартер-генераторов, электроусилителей руля, прямых приводов в бытовой технике, электроприводов бетоносмесителей, грузоподъемных механизмов, ленточных транспортеров, насосов для перекачки жидкостей, механизмов с высокими моментами на валу и низкими частотами его вращения, а также в качестве ветрогенераторов, гидрогенераторов, высокочастотных электрических генераторов и синхронных генераторов преобразователей частоты. Предлагаемая бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором содержит статор, сердечник якоря которого набран из изолированных листов электротехнической стали с высокой магнитной проницаемостью и имеет явно выраженные полюса, на внутренней поверхности которых выполнены элементарные зубцы, катушечную m-фазную обмотку якоря, каждая катушка которой размещена на соответствующем явно выраженном полюсе якоря, и безобмоточный ферромагнитный ротор, содержащий индуктор с нечетными и четными зубчатыми сердечниками с одинаковым числом зубцов на каждом сердечнике, нечетные и четные зубчатые сердечники индуктора выполнены в виде пакетов, набранных из изолированных листов электротехнической стали с высокой магнитной проницаемостью, число сердечников индуктора не менее двух, четные сердечники индуктора смещены относительно нечетных в тангенциальном направлении на половину зубцового деления индуктора, между магнитопроводами индуктора расположены кольцевые слои аксиально намагниченных в одном направлении сегментарных постоянных магнитов. При этом выполненяются определенные соотношения между числом явно выраженных полюсов якоря, числом элементарных зубцов на явно выраженном полюсе якоря, числом явно выраженных полюсов якоря в фазе, общим числом зубцов якоря, числом зубцов на каждом сердечнике индуктора и числом фаз m-фазной обмотки якоря бесконтактной редукторной магнитоэлектрической машины с многопакетным индуктором. Технический результат, достигаемый при использовании данного изобретения, состоит в обеспечении высоких энергетических и эксплуатационных показателей, большого удельного вращающего момента на валу и высокой электромагнитной редукции частоты вращения в режиме электрического двигателя, а также большой удельной мощности при высоких частотах ЭДС в режиме электрического генератора. 11 з.п. ф-лы, 15 ил., 1 табл.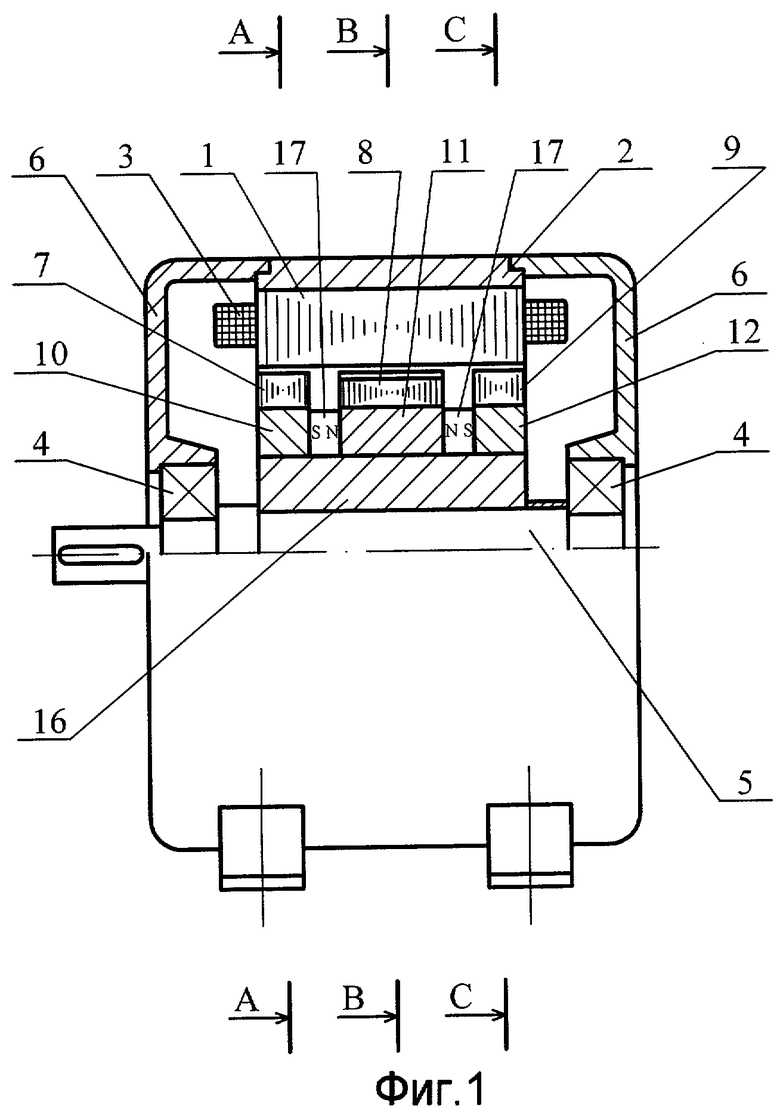
1. Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором, содержащая статор с явно выраженными зубчатыми полюсами и с сосредоточенной m-фазной обмоткой якоря, выполненной в виде катушек, охватывающих полюса статора, и зубчатый ротор, выполненный в виде двух соосно расположенных кольцевых зубчатых магнитомягких магнитопроводов ротора, развернутых относительно друг друга на половину своего зубцового деления, между которыми размещен кольцевой слой аксиально намагниченных в одном направлении постоянных магнитов, причем зубчатые полюса статора и зубчатые магнитопроводы ротора обращены друг к другу и разделены воздушным зазором δ, ротор снабжен немагнитной втулкой, отличающаяся тем, что статор содержит шихтованный сердечник якоря с явно выраженными полюсами, на внутренней поверхности которых расположены элементарные зубцы по Z1s зубцов на каждом полюсе, причем Z1s=1, 2, 3, 4 …, обмотка якоря является m-фазной катушечной обмоткой, каждая катушка которой размещена на соответствующем явно выраженном полюсе якоря, причем m=3, 4, 5, 6 …, безобмоточный ферромагнитный ротор содержит индуктор с нечетными и четными зубчатыми сердечниками с одинаковым числом зубцов на каждом сердечнике, сердечники индуктора выполнены в виде пакетов, набранных из изолированных листов электротехнической стали с высокой магнитной проницаемостью, число сердечников индуктора не менее двух, длина крайних сердечников индуктора в аксиальном направлении одинакова, четные сердечники индуктора смещены относительно нечетных сердечников индуктора в тангенциальном направлении на половину зубцового деления индуктора tZ2, ширина коронок зубцов сердечников индуктора определяется выражением bZ2=k·tZ2, а ширина коронок элементарных зубцов, расположенных на явно выраженных полюсах якоря, определяется выражением bZ1=k·tZ1, при этом tZ1 представляет собой зубцовое деление явно выраженных полюсов якоря, а k=0,38÷0,5, между магнитопроводами индуктора расположены кольцевые слои аксиально намагниченных в одном направлении сегментарных постоянных магнитов, число кольцевых слоев сегментарных постоянных магнитов на один меньше числа сердечников индуктора, число явно выраженных полюсов якоря определяется равенством Z1p=m·Z1m, где Z1m=1, 2, 3, 4 … - число явно выраженных полюсов якоря в фазе, общее число зубцов якоря определяется равенством Z1=Z1p·Z1s, число зубцов на каждом сердечнике индуктора определяется равенством Z2=Z1±Z1m.
2. Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором по п.1, отличающаяся тем, что ширина коронок элементарных зубцов, расположенных на явно выраженных полюсах якоря, определяется выражением bZ1=k·tZ2.
3. Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором по п.1 или 2, отличающаяся тем, что при наличии сердечников индуктора более двух длина сердечников в аксиальном направлении, находящихся между крайними сердечниками индуктора, в два раза больше длины крайних сердечников.
4. Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором по п.1 или 2, отличающаяся тем, что якорь расположен снаружи, индуктор - внутри.
5. Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором по п.1 или 2, отличающаяся тем, что индуктор расположен снаружи, якорь - внутри.
6. Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором по п.1 или 2, отличающаяся тем, что при применении ее в качестве синхронного двигателя питание обмотки якоря осуществляется от m-фазного источника переменного напряжения постоянной частоты.
7. Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором по п.1 или 2, отличающаяся тем, что при применении ее в качестве синхронного двигателя питание обмотки якоря осуществляется от m-фазного источника переменного напряжения регулируемой частоты.
8. Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором по п.1 или 2, отличающаяся тем, что при применении ее в качестве синхронного двигателя питание обмотки якоря осуществляется от источника постоянного напряжения посредством управляемого инвертора, подающего синусоидальное напряжение на фазы обмотки якоря в зависимости от показаний датчика углового положения ротора для достижения максимального вращающего момента.
9. Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором по п.1 или 2, отличающаяся тем, что при применении ее в качестве двигателя постоянного тока питание обмотки якоря осуществляется прямоугольными импульсами напряжения от электронного коммутатора по определенному алгоритму в зависимости от показаний датчика углового положения ротора для достижения максимального вращающего момента.
10. Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором по п.1 или 2, отличающаяся тем, что при применении ее в качестве синхронного двигателя питание обмотки якоря осуществляется от однофазного источника переменного напряжения постоянной частоты при помощи фазосдвигающего элемента.
11. Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором по п.1 или 2, отличающаяся тем, что фазы обмотки якоря соединены в звезду.
12. Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором по п.1 или 2, отличающаяся тем, что фазы обмотки якоря соединены в многоугольник.
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
| СВЕРХПРОВОДНИКОВАЯ ВЕНТИЛЬНАЯ ИНДУКТОРНАЯ МАШИНА | 2001 |
|
RU2178942C1 |
| СИНХРОННЫЙ РЕДУКТОРНЫЙ ДВИГАТЕЛЬ | 1991 |
|
RU2054220C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2009599C1 |
| БЕСКОЛЛЕКТОРНЫЙ СИНХРОННЫЙ ГЕНЕРАТОР С ПОСТОЯННЫМИ МАГНИТАМИ | 2005 |
|
RU2303849C1 |
| Синхронный редукторный электродвигатель | 1988 |
|
SU1674312A1 |
| Трехфазный синхронный редукторный электродвигатель | 1989 |
|
SU1737643A1 |
| СИНХРОННЫЙ РЕДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2044384C1 |
| СПОСОБ ИНКАПСУЛЯЦИИ ФЕНБЕНДАЗОЛА | 2012 |
|
RU2522267C2 |
| US 3535604 А, 20.10.1970 | |||
| JP 10136607 А, 22.05.1998. | |||

