Изобретение относится к области электротехники, в частности к низкооборотным высокомоментным электрическим двигателям, электроприводам и генераторам, касается конструктивного исполнения бесконтактных магнитоэлектрических машин с электромагнитной редукцией с аксиальным возбуждением от постоянных магнитов и может быть использовано в системах автоматики, в военной технике, в космической технике, в бытовой технике, в качестве мотор-колес, мотор-барабанов, стартер-генераторов, электроусилителей руля, грузоподъемных механизмов, электроприводов бетоносмесителей, ленточных транспортеров, насосов для перекачки жидкостей, механизмов с высокими моментами на валу и низкими частотами вращения вала, в качестве прямых приводов без применения механических редукторов, а также в качестве ветрогенераторов, гидрогенераторов, высокочастотных электрических генераторов, синхронных преобразователей частоты и в качестве управляемых шаговых гибридных двигателей.
Известен синхронный редукторный двигатель (Патент RU 2054220 C1, МПК6 H02K 37/00, H02K 19/06, авторы: Шевченко А.Ф.; Калужский Д.Л.), содержащий ротор с Zp зубцами и статор с 4·р полюсами (р=1, 2, 3, …), на внутренней поверхности которых выполнены элементарные зубцы по Zs зубцов на каждом полюсе, причем Zr=4·p·(Zs+K)±p (где K=0, 1, 2, … - целое число), в большие пазы между полюсами уложены катушки однофазной обмотки по одной на каждом полюсе, катушки, расположенные на одноименных полюсах с номерами, различающимися на 4, соединены последовательно «конец» с «началом» и образуют четыре ветви, «конец» первой ветви, образованной 1, 5, …, 1+4·(p-1) катушками, соединен с «началом» третьей ветви, образованной 3, 7, …, 3+4·(p-1) катушками, и точка соединения этих ветвей подключена к первому выводу обмотки, «конец» второй ветви, образованной 2, 6, …, 2+4·(p-1) катушками, соединен с «началом» четвертой ветви, образованной 4, 8, …, 4+4·(p-1) катушками и точка соединения этих ветвей через последовательно включенный конденсатор также подключена к первому выводу, а ко второму выводу подключены два диода таким образом, что с анодом первого из них соединены первая и четвертая ветви, а с катодом второго диода - вторая и третья ветви. Недостатком описанного синхронного редукторного двигателя являются невысокие энергетические показатели. Кроме этого, указанные технические устройства чаще всего выполняют с малыми воздушными зазорами, что затрудняет их изготовление при массовом (серийном) производстве.
Известен принятый за прототип бесконтактный моментный электродвигатель (Патент RU 2285322 C1, МПК H02K 21/00, автор Епифанов O.K.), содержащий магнитомягкий кольцевой пазовый статор с Р явно выраженными зубчатыми полюсами и с сосредоточенной m-фазной обмоткой якоря, выполненной в виде катушек, охватывающих полюса статора, и ротор, выполненный в виде двух соосно расположенных кольцевых зубчатых магнитомягких магнитопроводов ротора, развернутых относительно друг друга на половину своего зубцового деления, между которыми размещен кольцевой слой аксиально намагниченных в одном направлении постоянных магнитов, причем зубчатые полюса статора и зубчатые магнитопроводы ротора обращены друг к другу и разделены воздушным зазором δ, а зубцы на магнитопроводах ротора и на полюсах статора выполнены с равномерными и равными друг другу зубцовыми делениями TZ, ротор снабжен немагнитной втулкой толщиной, большей половины толщины bM слоя постоянных магнитов, на которой установлены и закреплены неподвижно относительно друг друга зубчатые магнитопроводы ротора равной друг другу активной осевой длиной Lp и кольцевой слой постоянных магнитов, при этом число m фаз m-фазной обмотки якоря выполнено кратным трем, определяемым как m=2f±1, где f равно 1, 2, 3, …, а явно выраженные зубчатые полюса на пазовом статоре расположены равномерно, при этом их число определяется как Р=2m·2S, где s равно 0, 1, 2, …, а на каждом зубчатом полюсе статора симметрично относительно его оси размещено нечетное число зубцов ZC толщиной bZC, при этом оси зубцов соседних зубчатых полюсов статора смещены относительно друг друга на величину, пропорциональную отношению ±TZ к m, причем соседние полюса статора разделены шлицом шириной bШ не менее десятикратной величины воздушного зазора, определяемой из соотношения bШ=TZ·[(1±1/m)-bZC/TZ], а число зубцов ZR на каждом из зубчатых магнитопроводов ротора выполнено кратным 2n при n, равном 2, 3, 4, …, определяемым как ZR=Р·(ZC±1/m), при этом толщина зубцов bZP каждого из зубчатых магнитопроводов ротора выполнена равной половине его зубцового деления TZ и связана с толщиной зубцов зубчатых полюсов статора bZC соотношением 2/3≤bZC/bZP≤1, а катушки обмотки якоря одной фазы, отстоящие друг от друга на число полюсных делений статора, равное числу m фаз, соединены последовательно-согласно, при этом активная осевая длина LC кольцевого пазового статора с зубчатыми полюсами определяется из соотношения LC=(2LР+bM), причем кольцевые зубчатые магнитопроводы ротора расположены относительно кольцевого пазового статора аксиально симметрично. Недостатком прототипа является выполнение числа m фаз m-фазной обмотки якоря только кратным трем, числа явно выраженных зубчатых полюсов статора только четным, числа зубцов на каждом из зубчатых магнитопроводов ротора только кратным 2n при n, равном 2, 3, 4, …, числа зубцов, размещенных на каждом полюсе статора, только нечетным, толщины зубцов bZP каждого из зубчатых магнитопроводов ротора равной только половине его зубцового деления TZ. Это снижает возможные конструктивные исполнения данного технического устройства и возможности его использования.
Целью настоящего изобретения является создание при выполнении достаточно простой, надежной в эксплуатации, технологичной и высокоремонтопригодной с расширенными возможностями конструктивного исполнения и расширенными возможностями использования бесконтактной редукторной магнитоэлектрической машины с аксиальным возбуждением при сохранении высоких энергетических показателей и большого удельного вращающего момента на валу при высокой электромагнитной редукции частоты вращения в режиме электрического двигателя и при большой удельной мощности и высокой электромагнитной редукции частоты ЭДС в режиме электрического генератора.
Задачей настоящего изобретения является установление связи между числом полюсов якоря, числом фаз сосредоточенной на полюсах якоря m-фазной катушечной обмотки якоря, общим числом зубцов якоря и числом зубцов каждого сердечника индуктора, а также разработка алгоритма построения схемы соединений m-фазной катушечной обмотки якоря бесконтактной редукторной магнитоэлектрической машины с аксиальным возбуждением.
Техническим результатом настоящего изобретения является получение высокотехнологичных конструкций бесконтактных редукторных магнитоэлектрических машин с аксиальным возбуждением с высокой электромагнитной редукцией и расширенными возможностями их применения при сохранении высоких энергетических показателей и эксплуатационных характеристик.
С целью достижения задачи и технического результата изобретения статор содержит шихтованный сердечник якоря с явно выраженными полюсами, на внутренней поверхности которых выполнены элементарные зубцы, катушечную m-фазную обмотку якоря с возможностью применения каркасных катушек, каждая катушка которой размещена на соответствующем явно выраженном полюсе якоря по одной на полюсе, безобмоточный ферромагнитный ротор, содержащий индуктор с нечетными и четными зубчатыми сердечниками с одинаковым числом зубцов на каждом сердечнике, сердечники индуктора могут быть выполнены в виде пакетов, набранных из изолированных листов электротехнической стали с высокой магнитной проницаемостью, число сердечников индуктора не менее двух, активная длина крайних сердечников индуктора в аксиальном направлении одинакова, при наличии сердечников индуктора более двух, активная длина сердечников в аксиальном направлении, находящихся между крайними сердечниками индуктора, в два раза больше активной длины крайних сердечников, четные сердечники индуктора смещены относительно нечетных в тангенциальном направлении на половину своего зубцового деления, сердечники индуктора, выполненные в виде шихтованных пакетов, напрессованы на соответствующие втулки, изготовленные из магнитомягкой стали с высокой магнитной проницаемостью, являющиеся магнитопроводами индуктора и насаженные на немагнитную втулку, толщина которой в радиальном направлении значительно превышает величину воздушного зазора между статором и ротором, явно выраженные зубчатые полюса якоря и зубчатые сердечники индуктора обращены друг к другу и разделены воздушным зазором, между магнитопроводами индуктора расположены кольцевые слои аксиально намагниченных в одном направлении сегментарных постоянных магнитов, создающих униполярное постоянное магнитное поле возбуждения индуктора в воздушном зазоре, для машин с малыми диаметрами роторов возможно применение цельных кольцеобразных постоянных магнитов, число кольцевых слоев сегментарных постоянных магнитов на один меньше числа сердечников индуктора, зубцово-пазовая зона якоря выполнена «гребенчатой» распределенной, ширина коронок зубцов каждого сердечника индуктора определяется равенством bZ2=k·tZ2, ширина коронок элементарных зубцов, расположенных на явно выраженных полюсах якоря, определяется равенством bZ1=k·tZ1, при этом tZ1 и tZ2 представляют собой зубцовые деления явно выраженных полюсов якоря и сердечников индуктора соответственно, коэффициент k=0,38÷0,5 и его значение выбирается в зависимости от формы переменного тока источника питания при работе машины в режиме электрического двигателя и от формы переменной ЭДС якоря при работе машины в режиме электрического генератора.
Бесконтактная редукторная магнитоэлектрическая машина с аксиальным возбуждением может работать в режиме неуправляемой и управляемой синхронной машины, в режиме управляемого шагового двигателя и в режиме управляемого двигателя постоянного тока с независимым возбуждением.
При применении бесконтактной редукторной магнитоэлектрической машины с аксиальным возбуждением в качестве синхронного электрического двигателя питание обмотки якоря может осуществляться:
- от источника трехфазного переменного напряжения,
- от источника однофазного переменного напряжения при помощи фазосдвигающего элемента,
- от m-фазного источника переменного напряжения постоянной частоты,
- от m-фазного источника переменного напряжения регулируемой частоты,
- от источника постоянного напряжения посредством управляемого инвертора, подающего синусоидальное напряжение на фазы обмотки якоря в зависимости от показаний датчика углового положения ротора для достижения максимального вращающего момента.
При применении бесконтактной редукторной магнитоэлектрической машины с аксиальным возбуждением в качестве шагового двигателя питание обмотки якоря может осуществляется от источника питания, подающего на обмотку якоря импульсы напряжения по определенному алгоритму в определенный момент времени. При этом для удержания ротора в необходимом положении может быть применен механизм пофазного электромагнитного арретирования.
При применении бесконтактной редукторной магнитоэлектрической машины с аксиальным возбуждением в качестве двигателя постоянного тока с независимым возбуждением питание обмотки якоря осуществляется прямоугольными импульсами напряжения от электронного коммутатора по определенному алгоритму в зависимости от показаний датчика углового положения ротора для достижения максимального вращающего момента. При этом коэффициент k выбирается равным 0,5.
Бесконтактная редукторная магнитоэлектрическая машина с аксиальным возбуждением может также работать в качестве синхронного m-фазного генератора синусоидальной ЭДС и в качестве синхронного m-фазного генератора переменной ЭДС прямоугольной или трапециедальной формы без постоянной составляющей.
В настоящем изобретении индуктор является ротором, а якорь - статором. Возможны исполнения бесконтактной редукторной магнитоэлектрической машины с аксиальным возбуждением с внешним якорем и внутренним индуктором, с внутренним якорем и внешним индуктором.
Сущность изобретения поясняется чертежами:
фиг.1÷4 - примеры реализации изобретения в виде поперечных разрезов сердечников якоря и индуктора, схем соединений катушек m-фазных обмоток якоря и векторных диаграмм токов, протекающих по обмоткам якоря,
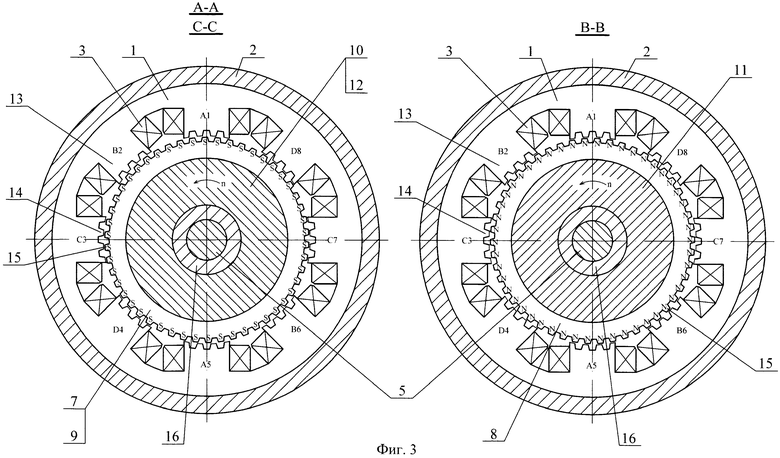
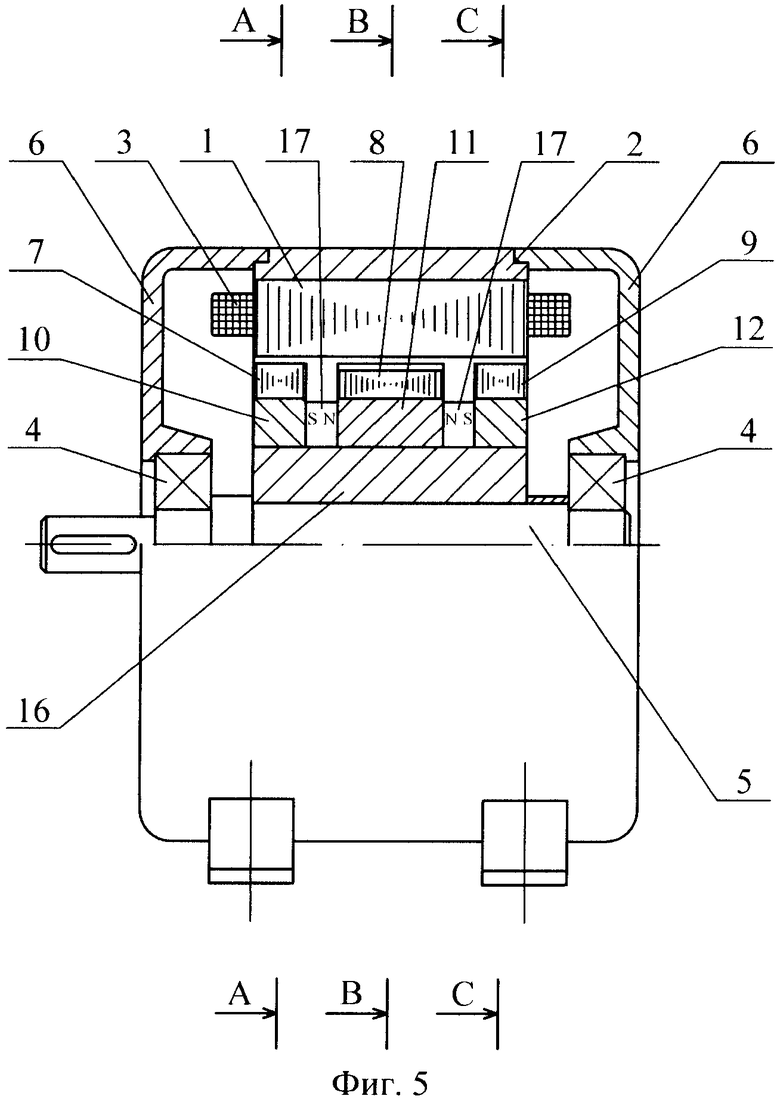
фиг.5 - общий вид бесконтактной редукторной магнитоэлектрической машины с аксиальным возбуждением с внешним якорем и внутренним индуктором с тремя сердечниками индуктора.
В соответствии с настоящим изобретением между числом явно выраженных полюсов якоря Z1P, числом фаз m-фазной катушечной обмотки якоря m=3, 4, 5, 6, …, общим числом зубцов якоря Z1 и числом зубцов каждого сердечника индуктора Z2 бесконтактной редукторной магнитоэлектрической машины с аксиальным возбуждением установлена предельная связь, необходимая для работоспособности машины и получения наилучших энергетических показателей при максимальном удельном моменте на валу, которая выражается равенствами (1), (2), (3):



где Z1m=1, 2, 3, 4, … - число явно выраженных полюсов якоря в фазе, Z1S=1, 2, 3, 4, … - число зубцов на явно выраженном полюсе якоря, K=0, 1, 2, 3, … - целое неотрицательное число, tZ1=360°/(Z1P·(Z1S+K)) и tZ2=360°/Z2 определяются в угловом измерении.
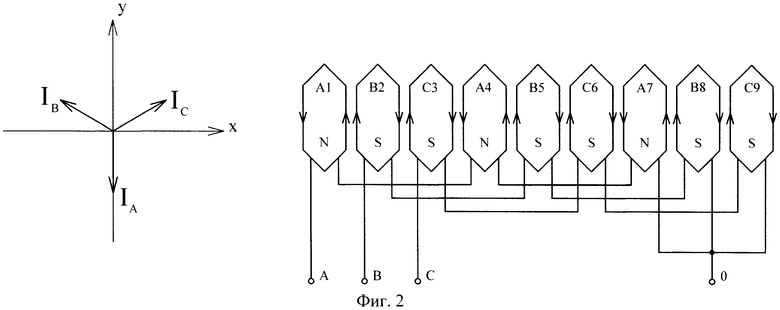
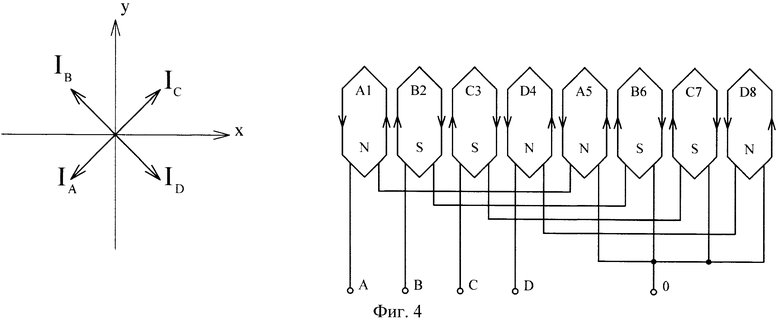
Катушки m-фазной обмотки якоря в фазе соединены между собой встречно в магнитном отношении. Начало фазы обмотки может принадлежать любой катушке в фазе. Расположение катушек фаз на полюсах якоря вдоль расточки статора осуществляется в соответствии с чередованием фазных токов на векторной диаграмме. Фазы обмотки якоря могут быть соединены между собой «в звезду» либо «в многоугольник».
На фиг.1÷4 представлены примеры реализации изобретения в соответствии с формулами (1), (2), (3) в виде поперечных разрезов сердечника якоря и нечетных и четного пакетов индуктора бесконтактной редукторной магнитоэлектрической машины с аксиальным возбуждением, схем соединений катушек m-фазных обмоток якоря при их включении на источники напряжений в двигательном режиме и векторных диаграмм токов, протекающих по обмотке якоря. Соответствие фигур чертежей поперечных разрезов сердечников якоря и индуктора и фигур схем соединений катушек m-фазных обмоток якоря поясняется в таблице 1. Положение сердечников индуктора относительно сердечника якоря на фигуре в двигательном режиме, положение векторов токов на векторной диаграмме и направления токов, протекающих по катушкам обмотки якоря, на соответствующей фигуре схемы соединений катушек m-фазной обмотки якоря бесконтактной редукторной магнитоэлектрической машины с аксиальным возбуждением показаны в один и тот же момент времени.
разреза
Рассмотрим конструкцию бесконтактной редукторной магнитоэлектрической машины с аксиальным возбуждением с внешним якорем и внутренним индуктором (фиг.1, фиг.3, фиг.5). Перемагничиваемый с высокой частотой сердечник 1 якоря выполнен шихтованным пакетом из изолированных листов электротехнической стали с высокой магнитной проницаемостью и запрессован в магнитопроводе 2, изготовленном из магнитомягкой стали с высокой магнитной проницаемостью. На каждом явно выраженном полюсе 13 якоря размещены элементарные зубцы 14. На полюсах 13 сосредоточена катушечная m-фазная обмотка 3 якоря, катушки которой выполнены из обмоточного медного провода или обмоточной медной шины. При изготовлении якоря с открытыми пазами катушки обмотки могут быть намотаны на станках на неэлектропроводящие каркасы и, затем, вместе с каркасами закреплены на полюсах якоря. Индуктор при помощи подшипников 4, вала 5 и подшипниковых щитов 6 позиционирован относительно якоря. Вал 5 выполнен из стали или из титана. Если вал 5 магнитный, то на нем закреплена немагнитная втулка 16, толщина которой в радиальном направлении значительно превышает воздушный зазор между статором и ротором. Немагнитная втулка 16 может быть выполнена из сплавов алюминия, из меди, титана, нержавеющей стали. Если вал 5 выполнен немагнитным, то втулка 16 может не устанавливаться. На немагнитной втулке 16 насажены втулки 10, 11 и 12, выполненные из магнитомягкой стали с высокой магнитной проницаемостью и являющиеся магнитопроводами индуктора, на втулках 10 и 12 напрессованы соответственно нечетные 7 и 9 сердечники индуктора, на втулке 11 напрессован четный сердечник 8 индуктора. Активная длина двух крайних сердечников 7 и 9 индуктора в аксиальном направлении одинакова, длина находящегося между ними сердечника 8 индуктора в два раза больше длины крайних сердечников 7 и 9. Сердечники 7, 8 и 9 индуктора могут представлять собой шихтованные из изолированных листов электротехнической стали с высокой магнитной проницаемостью пакеты и имеют одинаковое число на каждом пакете равномерно распределенных по окружности зубцов 15. С целью удешевления конструкции сердечники 7, 8 и 9 могут быть выполнены металлообработкой из цельных кусков стали с высокой магнитной проницаемостью. В этом случае втулки 10, 11 и 12 не устанавливаются. Четный 8 сердечник индуктора смещен относительно нечетных 7 и 9 сердечников индуктора в тангенциальном направлении на половину своего зубцового деления. Между магнитопроводами 10, 11 и 12 индуктора расположены кольцевые слои аксиально намагниченных в одном направлении сегментарных постоянных магнитов 17. Для машин с малыми диаметрами роторов возможно применение цельных кольцеобразных постоянных магнитов 17. Постоянные магниты 17 прилегают к магнитопроводам 10, 11 и 12 индуктора в аксиальном направлении и расположены таким образом, чтобы созданное ими постоянное магнитное поле возбуждения индуктора замыкалось через рабочий воздушный зазор униполярно. Число кольцевых слоев сегментарных постоянных магнитов на один меньше числа сердечников индуктора.
Бесконтактная редукторная магнитоэлектрическая машина с аксиальным возбуждением работает в двигательном и генераторном режимах.
Рассмотрим двигательный режим (фиг.1, фиг.3, фиг.5). Возбуждение индуктора создается кольцевыми слоями сегментарных постоянных магнитов 17, намагниченных в аксиальном направлении. При этом образуется постоянное магнитное поле индуктора с постоянной во времени МДС индуктора и постоянным магнитным потоком индуктора, униполярно замыкающимся через магнитопроводы 10, 11, 12 индуктора, сердечники 7, 8 и 9 индуктора, воздушный зазор между якорем и индуктором, сердечник 1 якоря и магнитопровод 2 якоря. Зубцы 15 нечетных сердечников 7 и 9 индуктора намагничиваются и образуют полюса одной магнитной полярности, например, южные полюса «S», а зубцы 15 четного сердечника 8 индуктора намагничиваются и образуют полюса другой магнитной полярности, например, северные полюса «N». На фазы m-фазной обмотки 3 якоря подают переменное напряжение, по m-фазной обмотке 3 якоря протекает переменный ток, создающий переменное вращающееся магнитное поле якоря. При этом образуется переменная во времени МДС якоря и переменный во времени магнитный поток якоря. На фиг.2 и фиг.4 представлены векторные диаграммы токов, протекающих по соответствующим m-фазным обмоткам 3 якоря, схемы соединений которых представлены на этих же чертежах. Векторы токов во времени поворачиваются в осях координат xy против часовой стрелки. Рассмотрим момент времени, когда токи проецируются на ось ординат. B соответствии с этими проекциями на фиг.2 и фиг.4 обозначены направления токов в катушках m-фазных обмоток якоря. При этом элементарные зубцы 14, выполненные на соответствующих явно выраженных полюсах 13 якоря, на которых расположены катушки m-фазной обмотки 3 якоря, образуют южные магнитные полюса «S» и северные магнитные полюса «N». Вследствие взаимодействия переменного магнитного поля якоря с постоянным магнитным полем индуктора к ротору приложен однонаправленный в течение всего времени работы электрического двигателя вращающий момент. Согласно изобретению за один период изменения магнитного поля якоря ротор перемещается на одно зубцовое деление сердечника индуктора. Отсюда следует, что при изменении питающих m-фазных напряжений, поданных на m-фазную обмотку якоря с частотой f (Гц), ротор вращается с синхронной частотой n=60·f/Z2 (об/мин). Этим и достигается высокая электромагнитная редукция частоты вращения ротора, направление движения которого на чертежах показано стрелкой с буквой «n». Нетрудно заметить, что в данной конструкции ротор вращается согласно с направлением вращения магнитного поля якоря.
Рассмотрим генераторный режим (фиг.1, фиг.3, фиг.5). При вращении ротора сторонним источником момента с частотой вращения n постоянный магнитный поток индуктора, созданный кольцевыми слоями сегментарных постоянных магнитов 17, пронизывает воздушный зазор и явно выраженные полюса 13 якоря то со стороны индуктора, то со стороны якоря, создавая при этом в явно выраженных полюсах 13 якоря переменный магнитный поток, наводящий в катушках m-фазной обмотки 3 якоря переменную во времени ЭДС. Если внешняя цепь - цепь нагрузки замкнута, то по m-фазной обмотке 3 якоря протекает переменный электрический ток, электрическая мощность отдается потребителю.
Изобретение относится к области электротехники, в частности к низкооборотным высокомоментным электрическим двигателям, электроприводам и генераторам, касается конструктивного исполнения бесконтактных магнитоэлектрических машин с электромагнитной редукцией с аксиальным возбуждением от постоянных магнитов и может быть использовано в системах автоматики, в военной технике, в космической технике, в бытовой технике, в качестве мотор-колес, мотор-барабанов, стартер-генераторов, электроусилителей руля, грузоподъемных механизмов, электроприводов бетоносмесителей, ленточных транспортеров, насосов для перекачки жидкостей, механизмов с высокими моментами на валу и низкими частотами вращения вала, в качестве прямых приводов без применения механических редукторов, а также в качестве ветрогенераторов, гидрогенераторов, высокочастотных электрических генераторов, синхронных преобразователей частоты и в качестве управляемых шаговых гибридных двигателей. Бесконтактная редукторная магнитоэлектрическая машина с аксиальным возбуждением содержит статор, сердечник якоря которого набран из изолированных листов электротехнической стали с высокой магнитной проницаемостью и имеет явно выраженные полюса, на внутренней поверхности которых выполнены элементарные зубцы, катушечную m-фазную обмотку якоря, каждая катушка которой размещена на соответствующем явно выраженном полюсе якоря, и безобмоточный ферромагнитный ротор, содержащий индуктор с нечетными и четными зубчатыми сердечниками с одинаковым числом зубцов на каждом сердечнике, нечетные и четные зубчатые сердечники индуктора выполнены в виде пакетов, набранных из изолированных листов электротехнической стали с высокой магнитной проницаемостью, число сердечников индуктора не менее двух, четные сердечники индуктора смещены относительно нечетных в тангенциальном направлении на половину своего зубцового деления, между магнитопроводами индуктора расположены кольцевые слои аксиально намагниченных в одном направлении сегментарных постоянных магнитов. При этом для работоспособности бесконтактной редукторной магнитоэлектрической машины с аксиальным возбуждением должны выполняться определенные соотношения между числом явно выраженных полюсов якоря, числом элементарных зубцов на явно выраженном полюсе якоря, числом явно выраженных полюсов якоря в фазе, общим числом зубцов якоря, числом зубцов на каждом сердечнике индуктора и числом фаз m-фазной обмотки якоря. Технический результат, достигаемый при использовании данного изобретения, состоит в получении высокотехнологичных конструкций бесконтактных редукторных магнитоэлектрических машин с аксиальным возбуждением с высокой электромагнитной редукцией и расширенными возможностями их применения при сохранении высоких энергетических показателей и эксплуатационных характеристик. 4 з.п. ф-лы, 5 ил., 1 табл.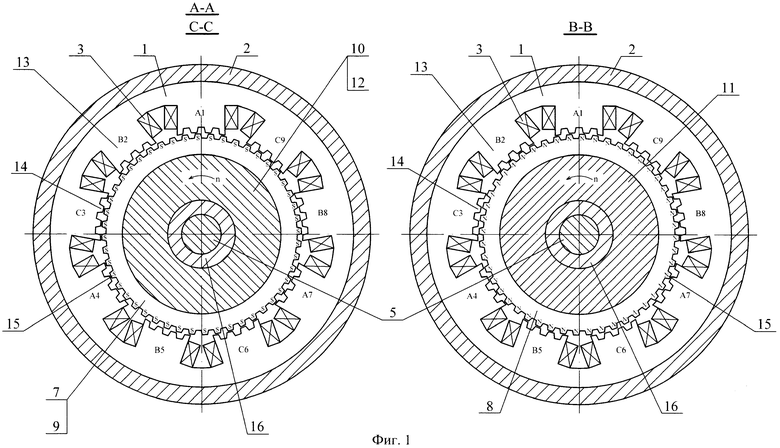
1. Бесконтактная редукторная магнитоэлектрическая машина с аксиальным возбуждением, содержащая статор с явно выраженными зубчатыми полюсами якоря и с сосредоточенной m-фазной обмоткой якоря, выполненной в виде катушек, охватывающих полюса статора, и зубчатый ротор, выполненный в виде двух соосно расположенных кольцевых зубчатых магнитомягких магнитопроводов ротора, развернутых относительно друг друга на половину своего зубцового деления, между которыми размещен кольцевой слой аксиально намагниченных в одном направлении постоянных магнитов, причем зубчатые полюса статора и зубчатые магнитопроводы ротора обращены друг к другу и разделены воздушным зазором δ, ротор снабжен немагнитной втулкой, отличающаяся тем, что статор содержит шихтованный сердечник якоря с явно выраженными полюсами, на внутренней поверхности которых выполнены элементарные зубцы по Z1S зубцов на каждом полюсе, причем Z1S=1, 2, 3, 4, …, обмотка якоря является m-фазной катушечной обмоткой, каждая катушка которой размещена на соответствующем явно выраженном полюсе якоря по одной на полюсе, причем m=3, 4, 5, 6, …, безобмоточный ферромагнитный ротор содержит индуктор с нечетными и четными зубчатыми сердечниками с одинаковым числом зубцов на каждом сердечнике, число сердечников индуктора не менее двух, четные сердечники индуктора смещены относительно нечетных в тангенциальном направлении на половину своего зубцового деления, между магнитопроводами индуктора расположены кольцевые слои аксиально намагниченных в одном направлении сегментарных постоянных магнитов, создающих униполярное постоянное магнитное поле возбуждения индуктора в рабочем воздушном зазоре, число кольцевых слоев сегментарных постоянных магнитов на один меньше числа сердечников индуктора, зубцово-пазовая зона якоря выполнена «гребенчатой» распределенной, ширина коронок зубцов каждого сердечника индуктора определяется равенством bZ2=k·tZ2, ширина коронок элементарных зубцов, расположенных на явно выраженных полюсах якоря, определяется равенством bZ1=k·tZ1, при этом tZ1 и tZ2 представляют собой зубцовые деления явно выраженных полюсов якоря и сердечников индуктора соответственно, между числом явно выраженных полюсов якоря Z1P, числом фаз m-фазной катушечной обмотки якоря m, общим числом зубцов якоря Z1 и числом зубцов каждого сердечника индуктора Z2 установлена предельная связь, необходимая для работоспособности машины и получения наилучших энергетических показателей при максимальном удельном моменте на валу, которая выражается равенствами (1), (2), (3)



где Z1m=1, 2, 3, 4, … - число явно выраженных полюсов якоря в фазе, K=0, 1, 2, 3, … - целое неотрицательное число, tZ1=360°/(Z1P·(Z1S+K)) и tZ2=360°/Z2 определяются в угловом измерении, катушки m-фазной обмотки якоря в фазе соединены между собой встречно в магнитном отношении.
2. Бесконтактная редукторная магнитоэлектрическая машина с аксиальным возбуждением по п.1, отличающаяся тем, что якорь расположен снаружи, индуктор - внутри.
3. Бесконтактная редукторная магнитоэлектрическая машина с аксиальным возбуждением по п.1, отличающаяся тем, что индуктор расположен снаружи, якорь - внутри.
4. Бесконтактная редукторная магнитоэлектрическая машина с аксиальным возбуждением по п.1, отличающаяся тем, что фазы обмотки якоря соединены «в звезду».
5. Бесконтактная редукторная магнитоэлектрическая машина с аксиальным возбуждением по п.1, отличающаяся тем, что фазы обмотки якоря соединены «в многоугольник».
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
| СИНХРОННЫЙ РЕДУКТОРНЫЙ ДВИГАТЕЛЬ | 1991 |
|
RU2054220C1 |
| СВЕРХПРОВОДНИКОВАЯ ВЕНТИЛЬНАЯ ИНДУКТОРНАЯ МАШИНА | 2001 |
|
RU2178942C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2009599C1 |
| БЕСКОЛЛЕКТОРНЫЙ СИНХРОННЫЙ ГЕНЕРАТОР С ПОСТОЯННЫМИ МАГНИТАМИ | 2005 |
|
RU2303849C1 |
| Синхронный редукторный электродвигатель | 1988 |
|
SU1674312A1 |
| Трехфазный синхронный редукторный электродвигатель | 1989 |
|
SU1737643A1 |
| СИНХРОННЫЙ РЕДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2044384C1 |
| СПОСОБ ИНКАПСУЛЯЦИИ ФЕНБЕНДАЗОЛА | 2012 |
|
RU2522267C2 |
| US 3535604 А, 20.10.1970 | |||
| JP 10136607 A, 22.05.1998. | |||

