Изобретение относится к машиностроению, в частности к механизмам для преобразования вращательного движения в возвратно-поступательное, и может быть использовано в качестве суммирующего механизма.
Известен суммирующий механизм, содержащий корпус, в котором установлены элементы ввода, выполненные в виде толкателей и сопряженные с суммирующим элементом, пластину с выступом, ролики и пружины, в корпусе выполнен паз, а суммирующий элемент выполнен в виде клиньев, сопряженных с выступом пластины, на которой установлены ролики, размещенные в пазу корпуса, паз расположен перпендикулярно выступу пластины, элементы ввода и элемент вывода соединены с корпусом посредством соответствующей пружины (авт. свид. СССР N 746564, кл. G 06 G 3/00, 1980).
Данный механизм отличается конструктивной сложностью, невысокой точностью и неудобен в работе.
Известен суммирующий механизм, содержащий корпус и винтовые пары, взаимосвязанные между собой, винты расположены телескопически с возможностью осевого перемещения одного относительно другого и относительно корпуса, гайка большей пары установлена неподвижно в осевом направлении относительно корпуса, а гайки последующих винтовых пар установлены так же относительно винтов предыдущих пар (авт. свид. СССР N 316885, кл. F 16 H 25/02, 1970). Известный механизм имеет сложную конструкцию.
Наиболее близким по технической сущности к изобретению является эксцентриковый механизм, содержащий два эксцентрика, один из которых расположен внутри другого, причем один из них шарнирно установлен в корпусе, привод относительного вращения эксцентриков, эксцентрик, установленный в корпусе, является внешним и также снабжен приводом вращения относительно корпуса (авт. свид. СССР N 1573271, кл. F 16 H 21/18, 1990, прототип). Данный механизм обладает недостаточным диапазоном перемещения ведомого звена и не позволяет осуществлять суммирование перемещений.
Цель изобретения - расширение диапазона перемещений ведомого звена без изменения эксцентриситета его ведущих звеньев и обеспечение суммирования перемещений.
Для этого эксцентриковый механизм, содержащий два эксцентрика, один из которых расположен внутри другого, ведомое звено, установленное с возможностью вращения внутри внутреннего эксцентрика, и привод относительного вращения эксцентриков, снабжен "n" дополнительными парами эксцентриков, расположенных в одной плоскости с основной парой эксцентриков, так что основная пара эксцентриков расположена внутри первой дополнительной пары, при этом во всех парах внешний эксцентрик расположен концентрично относительно ведомого звена и эксцентрично относительно внутреннего эксцентрика последующей пары, при этом последний внешний эксцентрик шарнирно установлен в корпусе.
Такое выполнение эксцентрикового механизма расширяет диапазон перемещений ведомого звена и позволяет осуществлять суммирование перемещений.
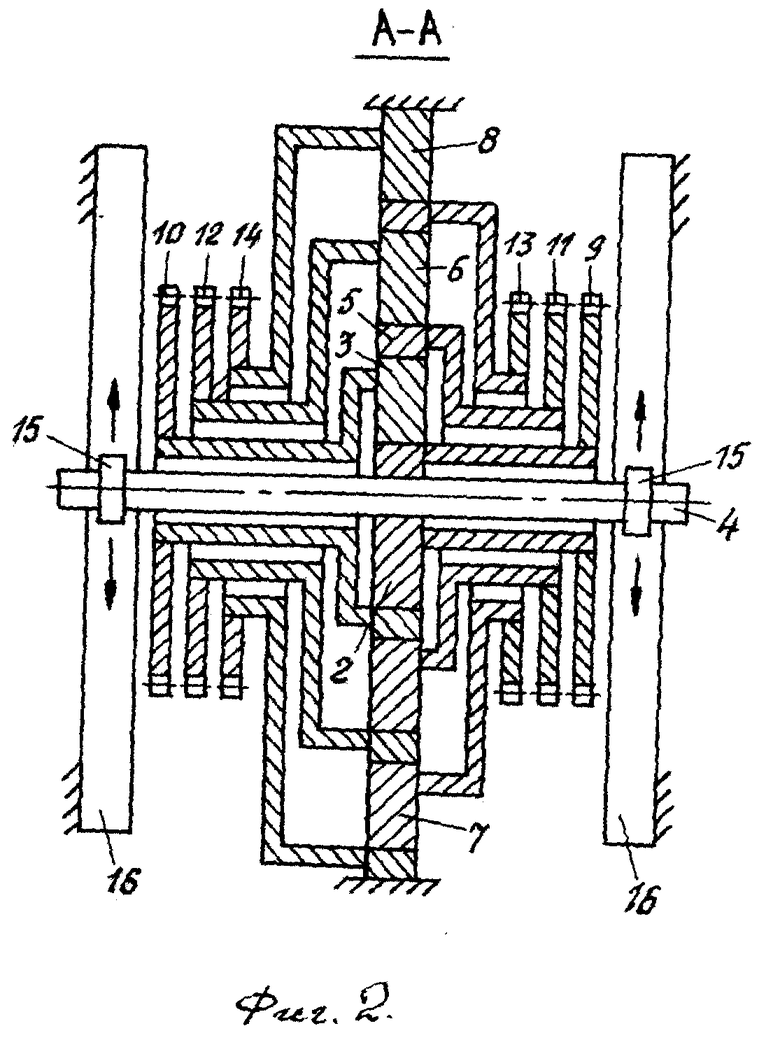
На фиг. 1 изображена схема предложенного механизма; на фиг. 2 - разрез А-А на фиг. 1. Эксцентриковый механизм содержит корпус 1, эксцентрики 2 и 3 и установленное внутри эксцентрика 2 ведомое звено 4.
Механизм снабжен n дополнительными парами аналогичных эксцентриков, расположенных в одной плоскости с основными эксцентриками 2 и 3. На чертеже показаны две пары дополнительных эксцентриков 5, 6 и 7, 8. Все внешние эксцентрики в парах расположены концентрично, а все внутренние эксцентрики - эксцентрично относительно ведомого звена 4. Последний внешний эксцентрик 8 с возможностью вращения установлен в корпусе 1, а ведомое звено 4 также с возможностью вращения установлено в эксцентрике 2. Все последующие внутренние эксцентрики 5 и 7 также с возможностью вращения расположены внутри внешних эксцентриков 6 и 8 соответственно. Последний эксцентрик 8 снабжен приводом его вращения относительно корпуса 1, а находящийся в паре с ним эксцентрик 7 - приводом его вращения относительно эксцентрика 8. В другой крайней паре эксцентрик 2 снабжен приводом его вращения относительно эксцентрика 3, а эксцентрик 3 - приводом его вращения относительно эксцентрика 2. Аналогичными приводами в каждой паре снабжены и эксцентрики, расположенные между крайними парами. Кинематическая связь эксцентриков с соответствующими приводами (не показаны) осуществляется через редукторные шестерни 9-14 соответственно.
Ведомое звено 4 снабжено роликами 15, расположенными в направляющих 16, выполненных в корпусе 1.
Механизм работает следующим образом. При вращении по взаимосвязанным законам (по стрелкам А и Б), например, эксцентриков 2 и 3, ведомое звено 4 (точнее некоторая его точка, например точка "0" - центр осей) перемещается по прямой линии. Изменяя начальную фазу положения каждого эксцентрика можно изменять положение траектории в плоскости перемещения. В случае равенства эксцентриситетов обоих эксцентриков можно обеспечить перемещение ведомого звена 4 через геометрический центр эксцентрика 2 на длину, равную четырем эксцентриситетам. Механизм работает аналогично, если по взаимосвязанным законам осуществлять вращение эксцентриков какой-либо другой пары. При этом заметим, что при вращении эксцентриков 5 и 6 (вторая пара) ведомым звеном будет эксцентрик 3, а при вращении эксцентриков 7 и 8 (третья пара) ведомым звеном будет эксцентрик 6. При этом вместе с указанными ведомыми звеньями одновременно будет перемещаться и основное ведомое звено 4. При одновременном вращении эксцентриков во всех парах ведомыми звеньями одновременно будут: основное ведомое звено 4 и эксцентрики 3 и 6, т.е. те звенья механизма, которые расположены концентрично основному ведомому звену 4. В случае равенства эксцентриситетов всех эксцентриков можно обеспечить перемещение ведомого звена 4 через геометрический центр эксцентрика 2 на длину S, равную
S = 4nε, (I)
где n - число пар эксцентриков;
ε - величина эксцентриситета отдельного эксцентрика.
Формула (I) предусматривает согласное направление эксцентриситетов (например, так, как показано на фиг. 1) и одинаковое направление вращения приводов. При несоблюдении этого будет происходить не арифметическое, а алгебраическое сложение перемещений ведомого звена 4. Очевидно, что при этом суммируются также и усилия перемещения.
При четном числе пар эксцентриков в идеальном случае (одновременность включения приводов, равенство скоростей вращения и других электромеханических характеристик, например времени разгона привода и др.) при соответствующем включении эксцентриков и приводов, перемещения ведомого звена 4, вызываемые отдельными парами эксцентриков будут компенсировать друг друга, в результате чего ведомое звено 4 не будет перемещаться, а будет оставаться на месте.
Если же в данном случае отдельные привода включать не одновременно, а поочередно, то можно получить возвратно-поступательное движение ведомого звена 4, причем с разными длинами перемещения в том и другом направлении.
Изобретение относится к механизмам для преобразования вращательного движения в возвратно-поступательное и может быть использовано также в качестве суммирующего механизма. Механизм представляет собой расположенные последовательно одна в другую n пар эксцентриков, в которых внутренние эксцентрики расположены концентрично, а внешние - эксцентрично ведомому звену, расположенному в центре устройства. Каждый эксцентрик в паре снабжен приводом его вращения относительно другого эксцентрика, а последний внешний эксцентрик шарнирно установлен в корпусе. При вращении по взаимосвязанным законам любой пары эксцентриков ведомое звено перемещается по прямой линии, а при вращении нескольких пар эксцентриков ведомое звено перемещается на расстояние, равное алгебраической сумме эксцентриситетов отдельных эксцентриков. Таким образом, расширяется диапазон перемещений ведомого звена без изменения эксцентриситета эксцентриков. 2 ил.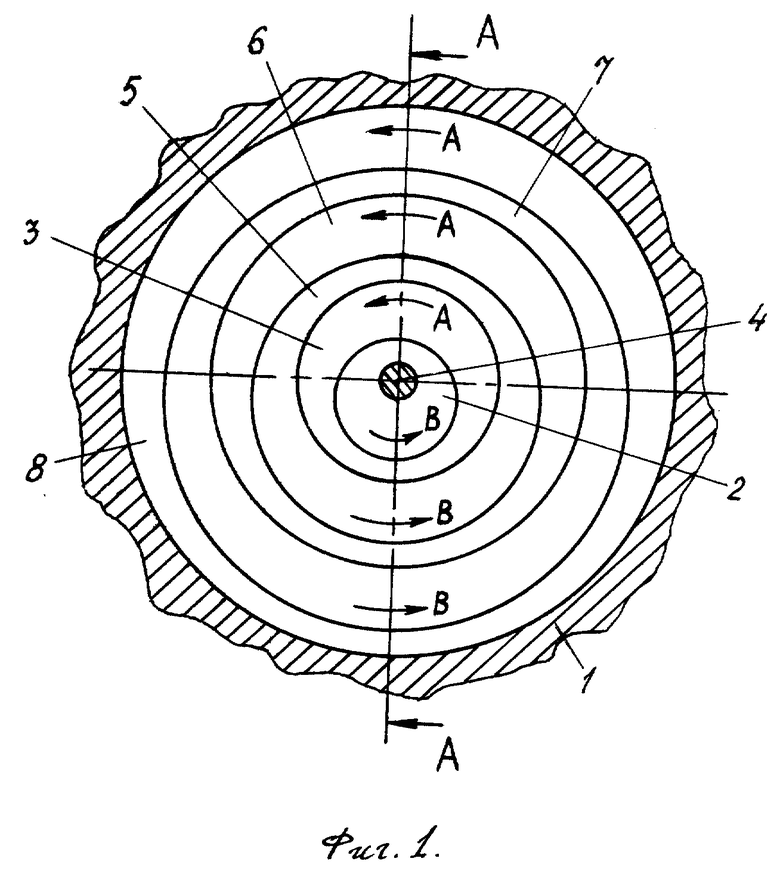
Эксцентриковый механизм, содержащий два эксцентрика, один из которых расположен внутри другого, ведомое звено, установленное с возможностью вращения внутри внутреннего эксцентрика, и привод относительного вращения эксцентриков, отличающийся тем, что он снабжен n дополнительными парами эксцентриков, расположенных в одной плоскости с основной парой эксцентриков так, что основная пара эксцентриков расположена внутри первой дополнительной пары, при этом во всех парах внешний эксцентрик расположен концентрично относительно ведомого звена и эксцентрично относительно внутреннего эксцентрика последующей пары, при этом последний внешний эксцентрик шарнирно установлен в корпусе.
| Эксцентриковый механизм Митрофанова А.А. | 1986 |
|
SU1573271A1 |
| СУММИРУЮЩИЙ ВИНТОВОЙ МЕХАНИЗМ | 0 |
|
SU316885A1 |
| Эксцентриковый механизм | 1985 |
|
SU1237833A2 |
| Эксцентриковый механизм | 1982 |
|
SU1057722A1 |

