Изобретение относится к машиностроению, а именно к эксцентриковым преобразователям вращательного движения в возвратно-поступательное, может быть использовано в поршневых машинах, станках-автоматах и т.п. и является дополнительным к авт. св. № 1057722.
Цель изобретения - расширение кинематических возможностей механизма за счет увеличения его передаточного отношения, т.е. снижения числа двойных ходов исполнительного звена по отношению к числу оборотов ведущего вала. Такая конструкция механизма упрощает общую конструкцию поршневой машины за счет исключения или упрощения понижающей передачи от привода.
На фиг. 1 показан предлагаемый механизм, продольньй разрез , на фиг. 2 - разрез А-А на фиг. 1.
Механизм содержит корпус 1 с прямолинейными направляющими 2, размещенный в корпусе 1 ведущий вал 3 с размещенным на нем эксцентриковым Кривошипом в виде эксцентрикового подшипника, включающего жестко закрепленную на валу 3 внутреннюю обойму 4, ролики 5 разного диаметра, сепаратор 6 и наружную обойму 7.
Шатун-эксцентрик механизма также выполнен в виде эксцентрикового подшипника, внутренняя обойма 8 которого концентрична наружной обойме 7 кривошипа и жестко закреплена на ней или вьшолнена заодно. Наружная обойма 9 подшипника шатун-эксцентрика
размещена так, что её ось лежит в одной плоскости с осью вала 3 и с продольной осью исполнительного звена 10, размещенного с возможностью возв- ратно-поступательного движения в направляющих 2 корпуса 1. Обойма 9 и звено 10 жестко связаны между собой.
Механизм работает следующим образом.
Радиальная нагрузка, приложенная к исполнительному звену 10 вдоль его оси через эксцентриковые подшипники, передается на ведущий вал 3. При этом
по крайней мере один из роликов 5 каждого подшипника сжат между соответствующими обоймами нормальными силами, а ведущий вал 3, вращаясь вместе с обоймой 4 со скоростью cJ ,
передает вращение остальным звеньям обоих подшипников (кроме обоймы 9), связанным с ним и между собой силами трения.
Если принять радиусы соответствующих обойм как г, г, г и Гд, то по методу обращенного движения (методу Виллиса) после преобразований получим выражение для определения передаточного числа механизма:
и -(+ 2) + 1. i в
При этом ход Н исполнительного звена 10 определяется по формуле Н гЕ, где Е - эксцентриситет вала- кривошипа и шатуна-эксцентрика, т.е. эксцентриситет эксцентриковых подшипников.
Редактор Т.Митенко
Составитель В.Савицкий
Техред О.Гортпай Корректор А.Обручар
Заказ 3271/37
Тираж 880Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. 2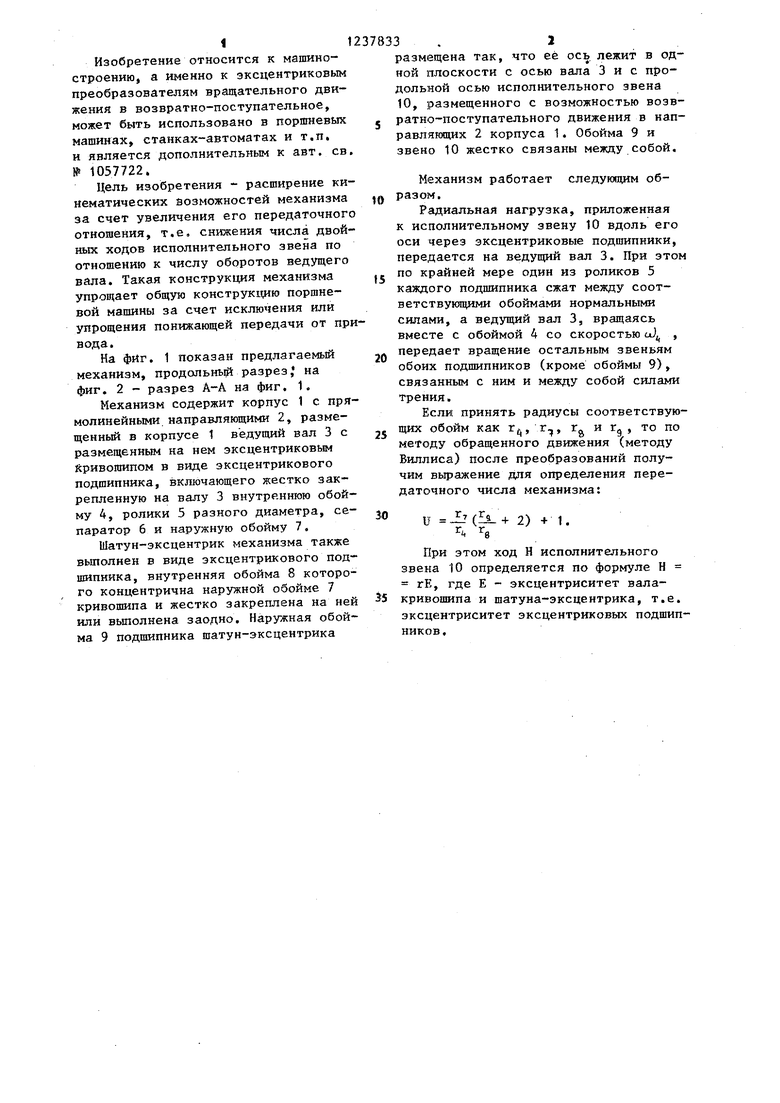
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСЦЕНТРИКОВЫЙ ШАТУН | 1999 |
|
RU2178106C2 |
| КУЛИСНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1992 |
|
RU2044939C1 |
| ЭКСЦЕНТРИКОВЫЙ ВАЛ | 2010 |
|
RU2432505C1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| ШЕСТЕРЕННЫЙ БЕСШАТУННЫЙ МЕХАНИЗМ С МНОГОКОЛЕНЧАТЫМ ВАЛОМ | 2013 |
|
RU2537073C1 |
| ИМПУЛЬСНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2000 |
|
RU2179674C2 |
| НАСОС ПОРШНЕВОЙ РЕГУЛИРУЕМЫЙ | 1999 |
|
RU2169860C2 |
| Эксцентриковый механизм | 1986 |
|
SU1370350A1 |
| ЭКСЦЕНТРИКОВЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ ИЛИ КОЛЕБАТЕЛЬНОЕ | 2007 |
|
RU2352839C1 |
| РЕГУЛИРУЕМЫЙ ЭКСЦЕНТРИКОВЫЙ УЗЕЛ | 1990 |
|
RU2010116C1 |


| Эксцентриковый механизм | 1982 |
|
SU1057722A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
