Изобретение относится к машиностроению и может быть использовано в устройствах, осуществляющих соединение монтажных проводов со штырем путем накрутки, в устройствах для финишной обработки (притирки, полировки) отверстий, валов и т. п. , а также в других устройствах, где требуется преобразование вращательного движения ведущего звена в сложное движение ведомого, состоящее из возвратно-поступательного и вращательного движений.
Известны механизмы для преобразования вращательного движения во вращательно-поступательное, содержащее корпус, рабочий вал, выполненный в виде винта, и гайку, установленную в опорах и связанную с рабочим валом дополнительной кинематической цепью (SU, авторское свидетельство N 362164, кл. F 16 H 22/20, 1973),
Недостатками этих механизмов являются сложность конструкции и зависимость поступательной составляющей движения от шага резьбы.
Наиболее близким по технической сущности к изобретению является механизм для преобразования вращательного движения в сложное, состоящее из возвратно-поступательного и вращательного движений, содержащий кривошипно-шатунный механизм и связанную с ним планетарную передачу, при этом шатун шарнирно соединен с сателлитом, выполняющим роль кривошипа, а ползун концентрично расположен на прямолинейной направляющей, выполненной в виде штока, концы которого жестко установлены в расточках неподвижного центрального зубчатого колеса и корпуса (SU, авторское свидетельство N 587294, кл. F 16 H 21/02; 37/12, 1976, прототип).
Однако данный механизм обладает недостаточной величиной передаваемого усилия, невысокой надежностью и долговечностью.
Задачей изобретения является повышение величины выходного усилия, надежности и долговечности механизма. Для этого механизм для преобразования вращательного движения в сложное, состоящее из возвратно-поступательного и вращательного движений, содержащий кривошипно-шатунный механизм, шатуны которого шарнирно соединены с соответствующими сателлитами, выполняющими роль кривошипов, состоящую из неподвижного центрального зубчатого колеса, двух сателлитов и водила, жестко связанного с ведущим валом, шток, соосно установленный в неподвижном центральном зубчатом колесе планетарной передачи, и расположенный на штоке с возможностью осевого перемещения ползун, снабжен дополнительным кривошипно-шатунным механизмом, шатуны которого шарнирно соединены с сателлитами, выполняющим роль кривошипов, дополнительной планетарной передачей, связанной с дополнительным кривошипно-шатунным механизмом и состоящей из дополнительного неподвижного центрального зубчатого колеса, двух сателлитов и водила, жестко связанного через шток с ведущим валом, при этом шарнирные соединения основного и дополнительного сателлитов установлены противофазно, а основной и дополнительный кривошипно-шатунные механизмы приводятся в действие от одного привода путем присоединения упомянутого штока к ведущему валу с возможностью вращения его относительно неподвижного центрального зубчатого колеса планетарной передачи. Такое выполнение механизма позволяет повысить величину его выходного усилия, надежность и долговечность.
На чертеже схематически изображен предложенный механизм.
Механизм для преобразования вращательного движения в сложное (МПВД) содержит планетарную передачу, состоящую из неподвижного центрального зубчатого колеса 1, двух сателлитов 2 и 3 и водила 4, жестко связанного с ведущим валом 5, соединенным через муфту 6 с двигателем (на чертеже не показан). С планетарной передачей связан кривошипно-шатунный механизм, состоящий из кривошипов, роль которых выполняют сателлиты 2 и 3, и ползуна 7, шарнирно соединенного с шатунами 8 и 9. Ползун 7 концентрично установлен с возможностью вращения и осевого перемещения на штоке 10, выполняющем роль прямолинейной направляющей для ползуна 7. Шток 10 жестко соединен с ведущим валом 5 и соосно установлен с возможностью вращения в неподвижном центральном зубчатом колесе 1 и корпусе 11.
Механизм снабжен дополнительной планетарной передаче, состоящей из неподвижного центрального зубчатого колеса 12, двух сателлитов 13 и 14, водила 15, дополнительного кривошипно-шатунного механизма, роль которого выполняют дополнительные сателлиты 13 и 14. Дополнительные шатуны 16 и 17 дополнительных кривошипов шарнирно соединены с ползуном 7 и дополнительными сателлитами 13 и 14 соответственно.
Механизм работает следующим образом. Ведущий вал 5 получает вращение от двигателя через муфту 6. Далее движение передается на водила 4 и 15, жестко связанные, первое непосредственно, а второе через шток 10, с ведущим валом 5 и через сателлиты 2, 3 и 13, 14 - на ведомое звено - ползун 7. Точки A и B шарнирного соединения основных шатунов 8 и 9 с сателлитами 2 и 3 и точки В и Г шарнирного соединения дополнительных шатунов 16 и 17 с дополнительными сателлитами 13 и 14 совершают двойной вращение: вокруг осей вращения сателлитов и вместе с сателлитами вокруг центрально оси X-X. Точки Д и Е, Ж и З шарнирного соединения шатунов 7, 8 и 16, 17 с ползуном 7 и точки А и Б, В и Г шарнирного соединения шатунов 8 и 9, 16 и 17 с сателлитами 2, 3 и 13, 14 находятся на разных расстояниях от оси X-X. В связи в этим вращение точек А и Б вокруг осей сателлитов 2 и 3 и точек В и Г вокруг осей сателлитов 13 и 14 преобразуется в возвратно-поступательное и вращательное движения точек Д и Е, Ж и З, а следовательно, и ползуна 7 вдоль и вокруг оси X-X. Таким образом, вращательное движение ведущего вала 5 преобразуется в сложное движение ползуна 7, состоящее из возвратно-поступательного и вращательного движений. Ввиду того что основные 2 и 3 и дополнительные 13 и 14 сателлиты установлены таким образом, что их шарнирные соединения А и Б находятся в противофазе с шарнирными соединениями В и Г, основная пара сателлитов 2 и 3 и дополнительная пара сателлитов 13 и 14 вращаются в противоположные стороны, толкающе-тянущие усилия шатунов 7, 8, 16 и 17 суммируются. Поэтому в данном механизме передаваемые на ползун 7 усилия вдвое больше, чем в известных подобных устройствах.
Передаваемое усилие в механизмах, в которых роль кривошипов выполняют сателлиты, является сугубо неравномерным. Оно время от времени изменяется от минимума до максимума и наоборот, что объясняется непрерывным изменением угла наклона шатунов к вертикальной оси устройства. Это является одной из основных причин возникновения вибраций, вредно влияющих на надежность и долговечность механизма. Однако в данном механизме этот недостаток практически отсутствует благодаря тому, что неравномерности усилия, возникающие в основном и дополнительном кривошипно-шатунных механизмах устройства, компенсируют (сглаживают) друг друга. Это повышает надежность и долговечность механизма.
Сущность изобретения: механизм для преобразования вращательного движения в сложное содержит основной и дополнительный кривошипно-шатунные механизмы, основную и дополнительную планетарные передачи, шток и ползуны. Шток соосно установлен в неподвижном центральном колесе основной планетарной передачи. Ползун расположен на штоке с возможностью осевого перемещения. Шатуны кривошипно-шатунных механизмов шарнирно соединены с сателлитами обоих планетарных передач, а сателлиты выполняют роль кривошипов. Шарнирные соединения основного и дополнительного сателлитов установлены противофазно. Водило основной планетарной передачи соединено с ведущим валом. Водило дополнительной планетарной передачи связано с ведущим валом через шток. При этом основной и дополнительный кривошипно-шатунные механизмы приводятся в действие от одного привода. 1 ил.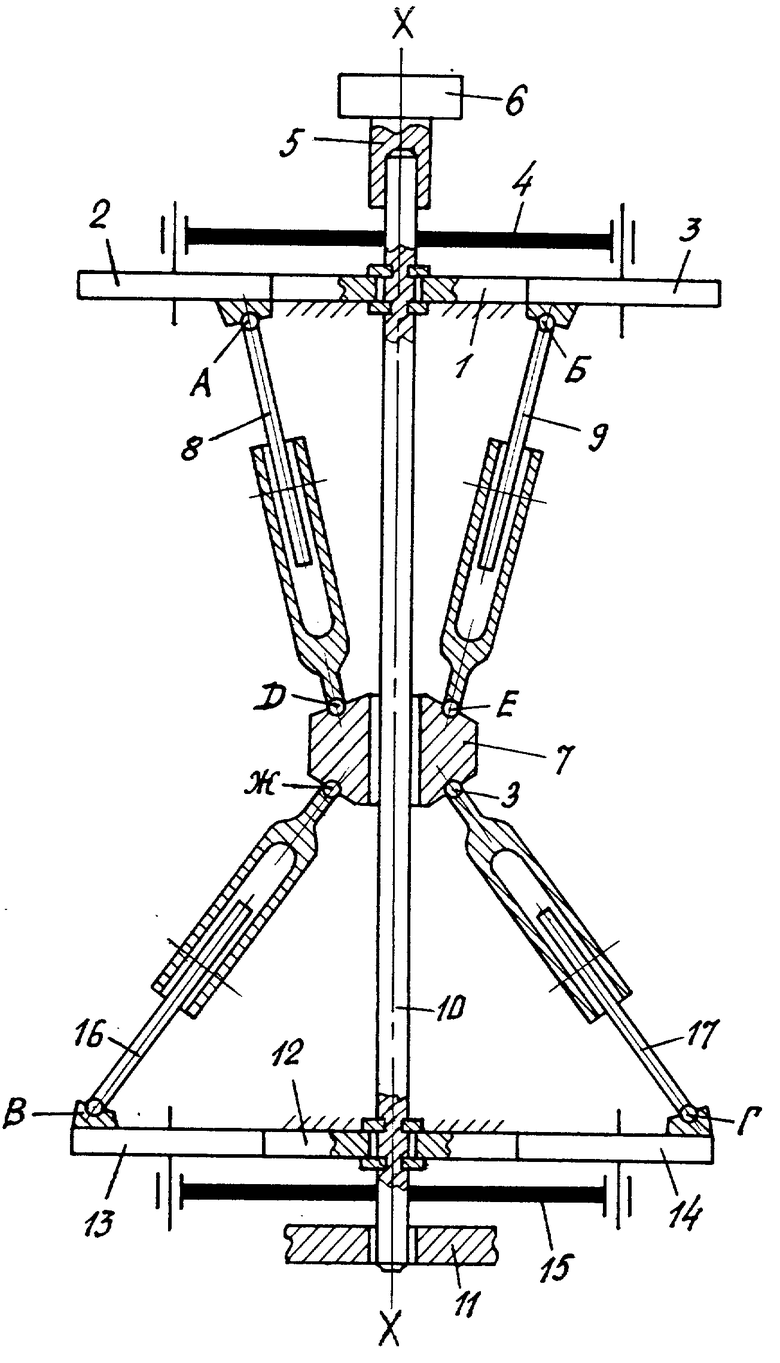
Механизм для преобразования вращательного движения в сложное, состоящее из возвратно-поступательного и вращательного движений, содержащий кривошипно-шатунный механизм, шатуны которого шарнирно соединены с соответствующими сателлитами, выполняющими роль кривошипов, связанную с кривошипно-шатунным механизмом планетарную передачу, состоящую из неподвижного центрального зубчатого колеса, двух сателлитов и водила, жестко связанного с ведущим валом, шток, соосно установленный в неподвижном центральном зубчатом колесе планетарной передачи, и расположенный на штоке с возможностью осевого перемещения ползун, отличающийся тем, что он снабжен дополнительным кривошипно-шатунным механизмом, шатуны которого шарнирно соединены с сателлитами, выполняющими роль кривошипов, дополнительной планетарной передачей, связанной с дополнительным кривошипно-шатунным механизмом и состоящей из дополнительного неподвижного центрального зубчатого колеса, двух сателлитов и водила, жестко связанного через шток с ведущим валом, при этом шарнирные соединения основного и дополнительного сателлитов установлены противофазно, а основной и дополнительный кривошипно-шатунный механизм приводятся в действие от одного привода путем присоединения упомянутого штока к ведущему валу с возможностью вращения его относительно неподвижного центрального зубчатого колеса планетарной передачи.
| SU, авторское свидетельство, 587294, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| SU, авторское свидетельство, 1499020, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |

