Изобретение относится к электромагнитным приводам контакторов, реле и других электромагнитных устройств автоматики и управления, питающихся от источника знакопеременного напряжения.
Известно [1] устройство форсированного управления электромагнитным приводом от источника знакопеременного напряжения через выпрямитель. Уменьшение тока в обмотке электромагнитного привода в режиме удерживания достигается за счет включения на стороне переменного тока выпрямителя обмотки другого электромагнита, якорь которого втягивается с задержкой. Недостаток этого устройства заключается в неэффективном использовании возможностей электромагнита, обтекаемого знакопеременным магнитным потоком, поскольку его электромагнитное усилие не используется для создания перемещения рабочего органа механизма, связанного с якорем электромагнитного привода.
Известен также электромагнитный привод [2], состоящий из двух магнитных систем с общим подпружиненным якорем и с последовательно включенными обмотками, одна из которых подсоединена к источнику знакопеременного напряжения через выпрямитель, другая - непосредственно. Кроме того, он содержит элемент, обеспечивающий разделение путей протекания магнитных потоков, выполненный в виде немагнитной прокладки. Магнитные системы соединены через элемент, разделяющий пути протекания магнитных потоков, и образуют с якорем четыре воздушных зазора. Обмотки расположены на стержнях разных магнитных систем.
Недостатком этого электромагнитного привода являются повышенные значения усилий трения в направляющих движения при прямоходовом перемещении рабочего органа механизма, сочлененного с якорем привода. Связано это с тем, что электромагнитные усилия в рабочих воздушных зазорах магнитных систем оказываются различными. Исключить это за счет выбора геометрических размеров магнитных систем и обмоточных данных катушек невозможно, поскольку мгновенные значения токов в обмотках, а значит, и магнитных потоков, усилий изменяются по различным закономерностям. При этом суммарный момент, действующий на якорь, не равен нулю. Повышенные значения усилий трения в направляющих движения могут приводить к заклиниванию подвижной системы, что может вызвать перегрев обмоток и даже их сгорание.
Все это ограничивает эксплуатационные возможности электромагнитного привода его использованием в механизмах, рабочий орган которых совершает вращательное возвратно-поступательное движение.
Наиболее близким по технической сущности к заявляемому электромагнитному приводу является электромагнитный привод [2], состоящий из трех симметричных магнитных систем, расположенных симметрично относительно двух взаимно перпендикулярных плоскостей симметрии привода, с последовательно соединенными обмотками, размещенными на каждой из этих магнитных систем и включенными в выходную диагональ однофазного мостового выпрямителя. Подвижные части магнитных систем механически связаны и обеспечивают прямоходовое возвратно-поступательное перемещение рабочего органа механизма, например траверс с контактами контактора. Неподвижные части магнитных систем установлены на общем основании, причем первые одноименные плоскости симметрии магнитных систем совпадают и образуют продольную плоскость симметрии привода, а вторые расположены симметрично относительно второй поперечной плоскости симметрии привода.
Недостатком этого привода являются большие массогабаритные показатели и потребляемая мощность в сработанном положении привода.
Задачей изобретения является создание электромагнитного привода с прямоходовым возвратно-поступательным движением рабочего органа с меньшими массогабаритными показателями и потребляемой мощностью в его сработанном положении.
Для этого в электромагнитном приводе, содержащем симметричные магнитные системы, расположенные симметрично относительно поперечной и продольной взаимно перпендикулярных плоскостей симметрии электромагнитного привода, с последовательно соединенными обмотками, подключенными через выпрямитель к клеммам источника знакопеременного напряжения и механически соединенными друг с другом подвижными частями каждой из магнитных систем, при этом привод содержит по крайней мере три симметричные магнитные системы, последовательно соединенные между собой обмотки, размещенные на первой части магнитных систем, симметрично расположенных по обе стороны от поперечной плоскости симметрии электромагнитного привода, подключены через выпрямитель к одной из клемм источника знакопеременного напряжения, а последовательно соединенные между собой обмотки, размещенные на второй части симметрично расположенных магнитных систем относительно поперечной плоскости симметрии электромагнитного привода, подключены одним концом к другой клемме источника знакопеременного напряжения, а другим концом к выпрямителю так, что при увеличении индуктивности этих обмоток обеспечивается уменьшение потребляемого тока, а при увеличении индуктивности обмоток, размещенных на первой части магнитных систем, - уменьшение амплитуды гармонических составляющих тока в них. При этом подвижные части магнитных систем могут быть выполнены в виде общего якоря.
На чертеже представлен схематичный рисунок, поясняющий исполнение электромагнитного привода.
Электромагнитный привод содержит три одинаковые симметричные магнитные системы 1.1, 1.2, 1.3, расположенные в двух плоскостях симметрии I11-I11, I21-I21; I12-I12, I22-I22; I13-I13, I23-I23 соответственно, обмотки 2.1, 2.2, 2.3, принадлежащие соответственно магнитным системам 1.1, 1.2, 1.3, подвижные части 3.1, 3.2, 3.3 магнитных систем, механически связанные элементом 4 конструкции и имеющие возможность совершать прямоходовое возвратно-поступательное перемещение. Неподвижные части магнитных систем 1.1, 1.2, 1.3 установлены на общем основании 5 таким образом, что плоскости симметрии I11-I11, I12-I12, I13-I13 магнитных систем совпадают и образуют продольную плоскости симметрии IП1 привода, а плоскости симметрии I21-I21, I22-I22, I23-I23 магнитных систем расположены симметрично относительно поперечной плоскости IП2 симметрии привода. В данном случае плоскости симметрии I22-I22 и IП2 совпадают. Последовательно соединенные обмотки 2.1 и 2.3 первой части магнитных систем 1.1 и 1.3 подключены через выпрямитель 6 к одной из клемм 7.2 источника знакопеременного напряжения. Обмотка 2.2 второй части магнитных систем 1.2 подключена одним концом к другой клемме 7.1 источника знакопеременного напряжения, а другим своим концом - к выпрямителю 6. Схема выпрямителя 6 может быть и иной, например может содержать лишь один диод, подключенный параллельно-последовательно соединенным обмоткам 2.1 и 2.3. Магнитные системы могут содержать и более одной обмотки.
Электромагнитный привод работает следующим образом. При подаче на клеммы 7.1 и 7.2 знакопеременного напряжения в начальном положении подвижных частей 3.1, 3.2, 3.3 по обмоткам 2.1, 2.2, 2.3 протекает большой пусковой ток, так как индуктивные сопротивления обмоток малы. Осуществляется форсированное включение привода.
По мере уменьшения воздушных зазоров в магнитных системах индуктивность обмоток резко возрастает. Увеличение индуктивности обмотки 2.2 уменьшает потребляемый ток, а увеличение индуктивности обмоток 2.1 и 2.3 уменьшает амплитуды гармонических составляющих тока в них.
Такой характер изменения токов в обмотках обеспечивает автоматическую безконтактную форсировку электромагнитного привода и уменьшение массогабараитных показателей и потребляемой им мощности, а описанное соединение обмоток - прямоходовое перемещение подвижной системы привода без перекосов и заклиниваний.
Источники информации, принятые во внимание
1. А.с. СССР N 84139, H 01 F 7/18, 1949 г.
2. А.с. СССР N 1612332, H 01 H 3/00, 1990 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОДНОЙ ЭЛЕКТРОМАГНИТ | 1992 |
|
RU2035786C1 |
| ПУСКОРЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РАЗРЯДНЫХ ЛАМП | 1996 |
|
RU2131175C1 |
| Приводной электромагнит контактора со встроенным выпрямителем | 1987 |
|
SU1472957A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ В ПОСТОЯННОЕ | 1994 |
|
RU2080221C1 |
| Электромагнит со встроенным выпрямителем | 1989 |
|
SU1653010A1 |
| Приводной электромагнит с встроенными выпрямителями и элементами управления | 1990 |
|
SU1756950A1 |
| Электромагнит со встроенными выпрямителями | 1989 |
|
SU1774384A1 |
| Двухобмоточный электромагнит с форсировкой | 1989 |
|
SU1647668A1 |
| ИСТОЧНИК ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ | 1995 |
|
RU2115993C1 |
| ТРАНСФОРМАТОРНОЕ УСТРОЙСТВО | 1995 |
|
RU2122760C1 |
Использование: в электромагнитных приводах контакторов, реле и других электромагнитных устройств автоматики и управления, питающихся от источника знакопеременного напряжения. Сущность изобретения: электромагнитный привод содержит три симметричные магнитные системы, расположенные в двух плоскостях симметрии, обмотки, принадлежащие магнитным системам. Подвижные части магнитных систем механически связаны. Неподвижные части магнитных систем установлены на общем основании таким образом, что одни плоскости симметрии магнитных систем совпадают и образуют продольную плоскость симметрии привода, а другие плоскости симметрии магнитных систем расположены симметрично относительно поперечной плоскости симметрии привода. Часть последовательно соединенных обмоток симметрично расположенных магнитных систем подключены через выпрямитель к одной из клемм источника питания, другая их часть подключена другим своим концом к другой клемме источника питания и к выпрямителю так, что при увеличении индуктивности этих обмоток обеспечивается уменьшение потребляемого тока, а при увеличении индуктивности обмоток, размещенных на первой части магнитных систем, - уменьшение амплитуды гармонических составляющих в них. Технический результат заключается в уменьшении массогабаритных показателей потребляемой мощности. 1 з.п.ф-лы, 1 ил.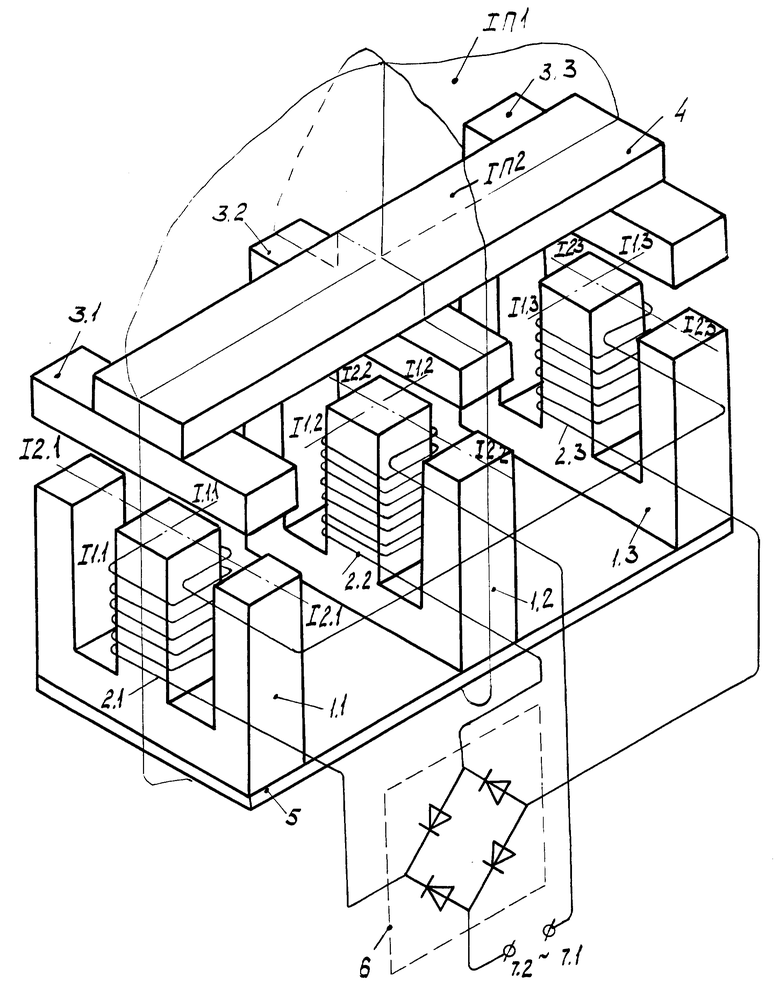
| Электромагнитный привод | 1989 |
|
SU1612332A1 |
| DE 4400822 A1, 20.07.95 | |||
| 5-ФЕНОКСИАЛКИЛ-2,4-ТИАЗОЛИДИНДИОНЫ, СПОСОБЫ ИХ ПОЛУЧЕНИЯ, СОДЕРЖАЩАЯ ИХ ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ И ПРОМЕЖУТОЧНЫЕ СОЕДИНЕНИЯ | 1997 |
|
RU2169144C2 |
| Устройство для питания электромагнитного привода постоянного тока | 1949 |
|
SU84139A1 |
