Изобретение относится к области судостроения и может найти применение в качестве автономного подводного аппарата.
Известен подводный аппарат-транспортировщик, содержащий легкий корпус с кабиной для размещения аквалангистов, источник электроэнергии, электродвигатель с гребным винтом, балластная цистерна с системой продувки сжатым воздухом, систему жизнеобеспечения. Водоизмещение 0,4 - 12 т, дальность плавания 2 - 6 км, глубина погружения 40 - 120 м (Морской энциклопедический словарь. Под ред. В.В. Дмитриева. - СПб.: Судостроение, 1993, К-П, с. 514).
Недостатками известного подводного аппарата-транспортировщика являются небольшая дальность плавания, малая глубина погружения.
Указанные недостатки обусловлены конструкцией подводного аппарата-транспортировщика и ограниченными запасами электроэнергии на борту.
Известен также американский подводный аппарат "Стар III", содержащий прочный сферический корпус, заключенный в легкий корпус веретенообразной формы, внутри которого установлены погружные аккумуляторные батареи, балластная цистерна с системой продувки сжатым воздухом, носовую и кормовую дифферентовочные цистерны, вертикальный, горизонтальный и маршевый гребные винты с приводными электродвигателями, механизмы управления. Глубина погружения 610 м, длина, ширина, высота 7,5 х 1,9 х 2,44 м, водоизмещение 10 т, полезная нагрузка 900 кг, мощность электродвигателей 2 х 1,75 кВт, 1 х 2 кВт, скорость движения 4 уз, дальность подводного плавания 8 миль, автономность 8 - 12 ч, экипаж 2 чел. /Морской энциклопедический словарь / Под ред. В.В. Дмитриева. - СПб.: Судостроение, 1993, К-П, с. 513; Диомидов М.Н., Дмитриев А.Н. Покорение глубин. - Л.: Судостроение, 1974, с. 174-176/.
Известный подводный аппарат "Стар III", как наиболее близкий по технической сущности и достигаемому полезному результату, принят за прототип.
Недостатки известного подводного аппарата "Стар III", принятого за прототип, те же.
Указанные недостатки обусловлены конструкцией подводного аппарата, ограниченным запасом электроэнергии и кислорода на борту, небольшой мощностью электродвигателей.
Целью настоящего изобретения является повышение эксплуатационных качеств подводных аппаратов.
Указанная цель, согласно изобретения, обеспечивается тем, что в легком корпусе дополнительно установлены: маршевый гидростатический двигатель, который через соединительные муфты и электродвигатель связан с гребным винтом, два гидростатических двигателя вертикального перемещения, каждый из которых через соединительные муфты и электродвигатель соединен с вертикальным гребным винтом, подводная установка получения кислорода, электрически подключенная к источнику постоянного тока.
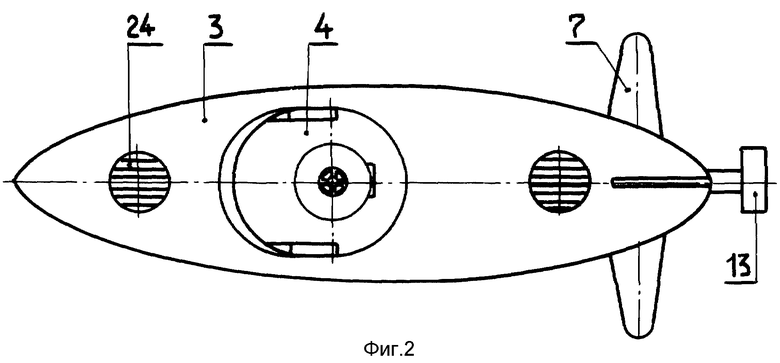
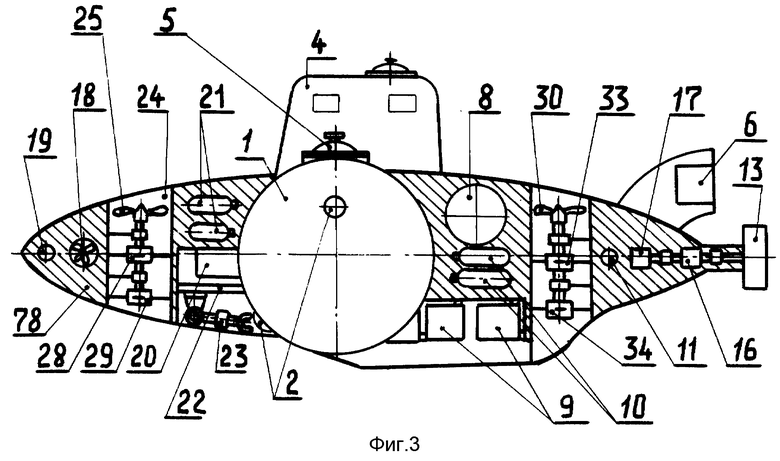
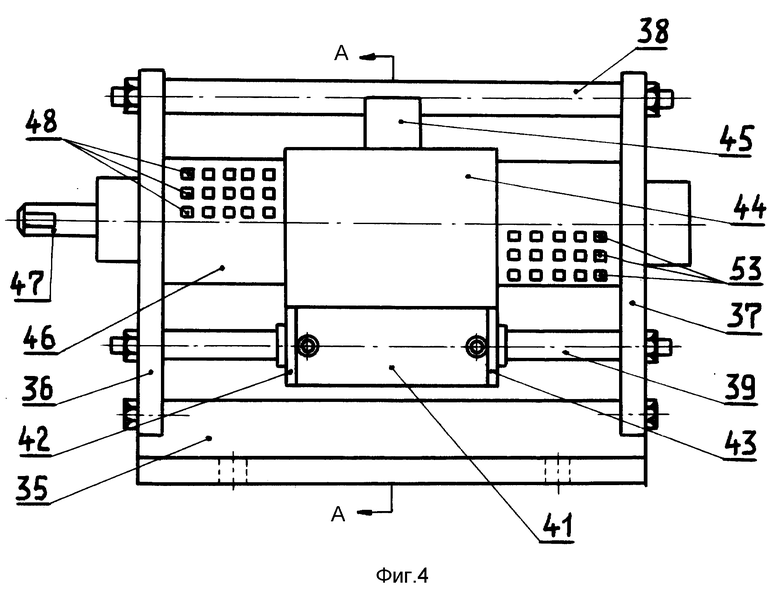
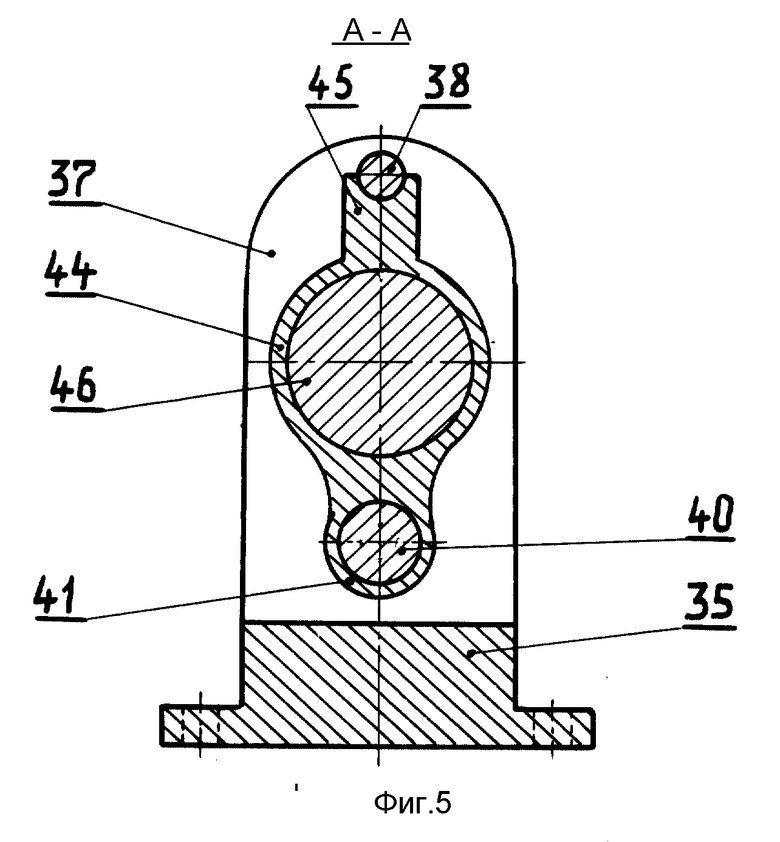
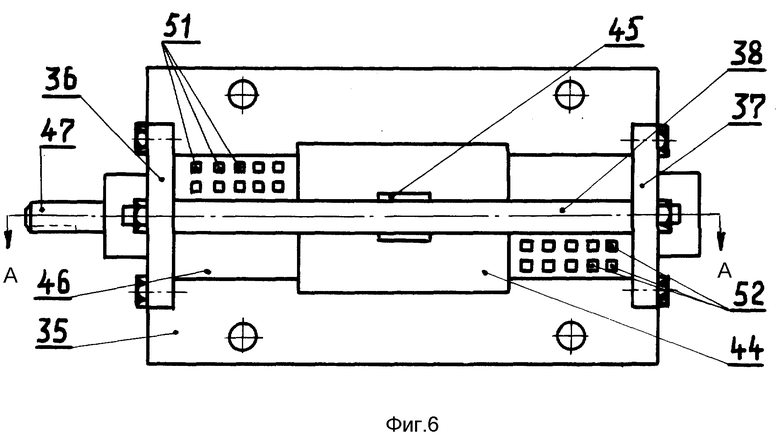
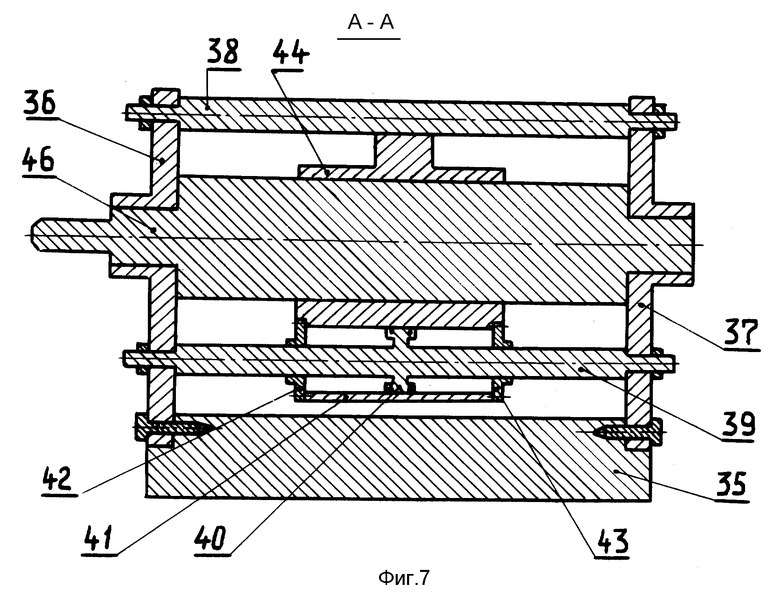
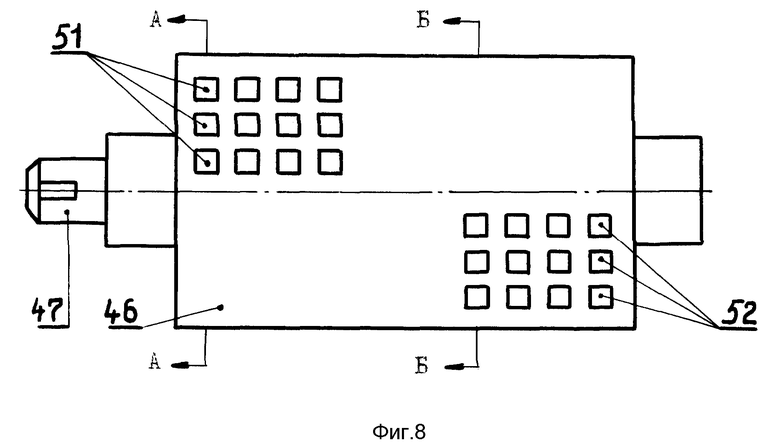
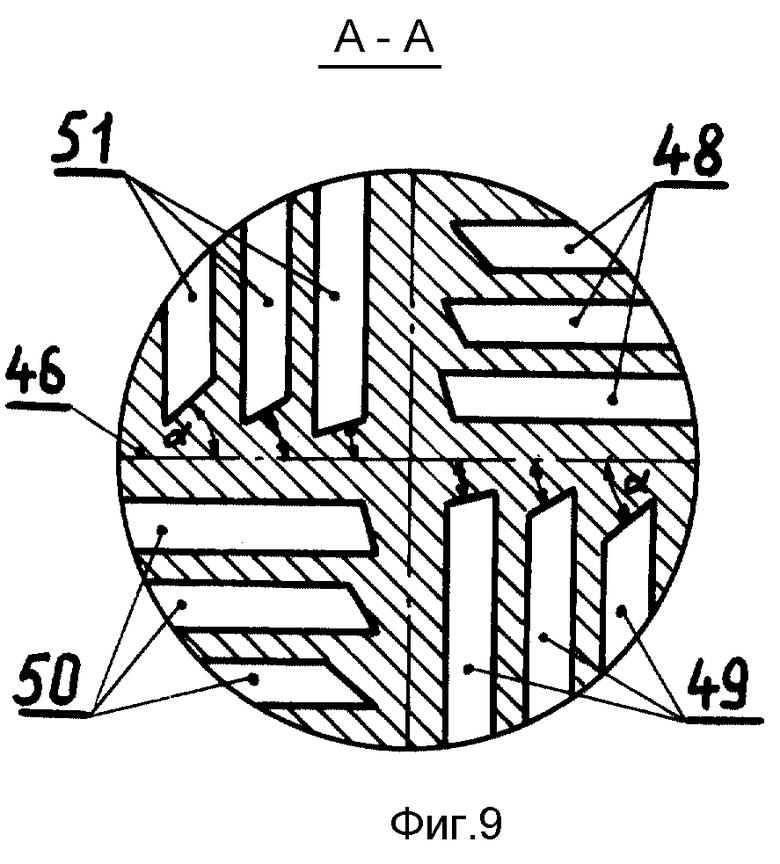
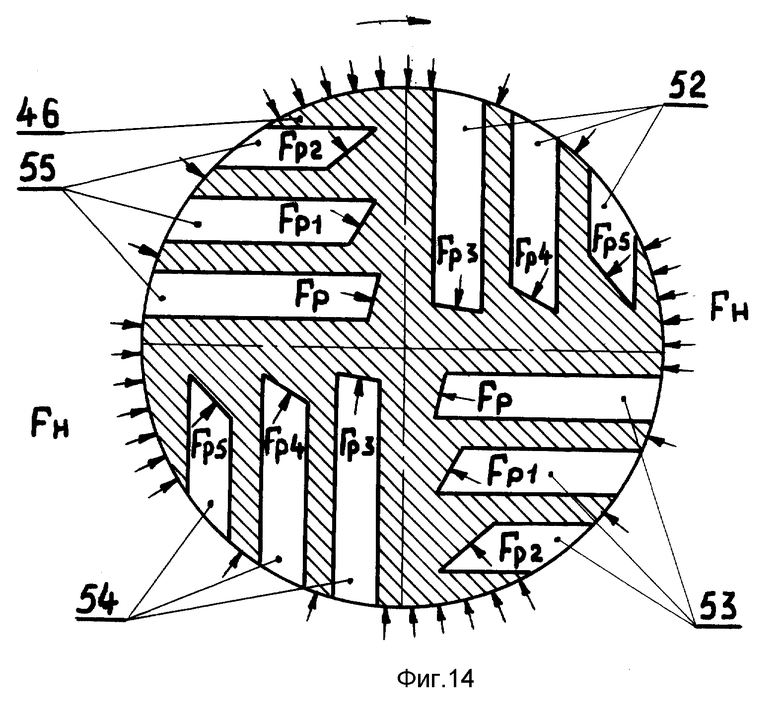
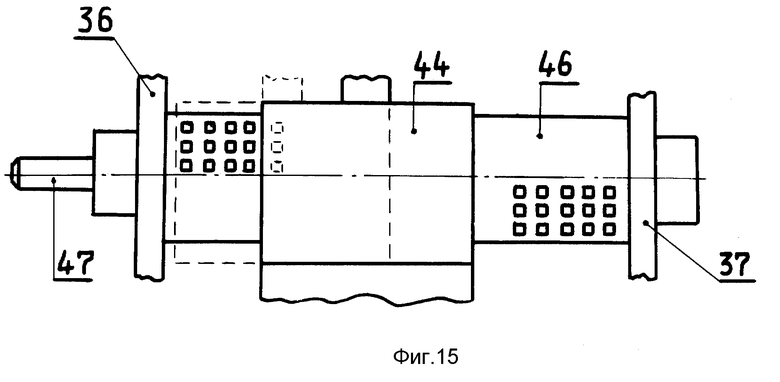
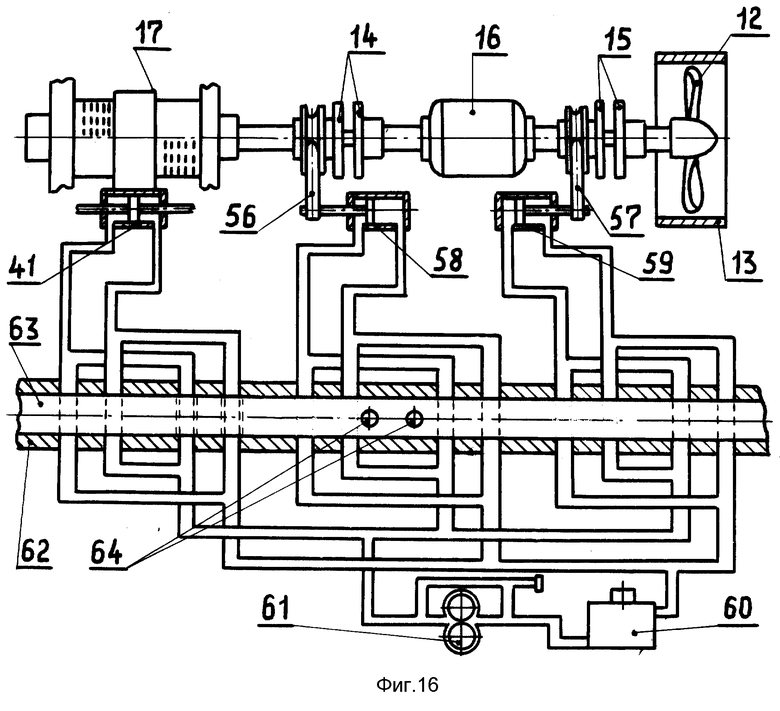
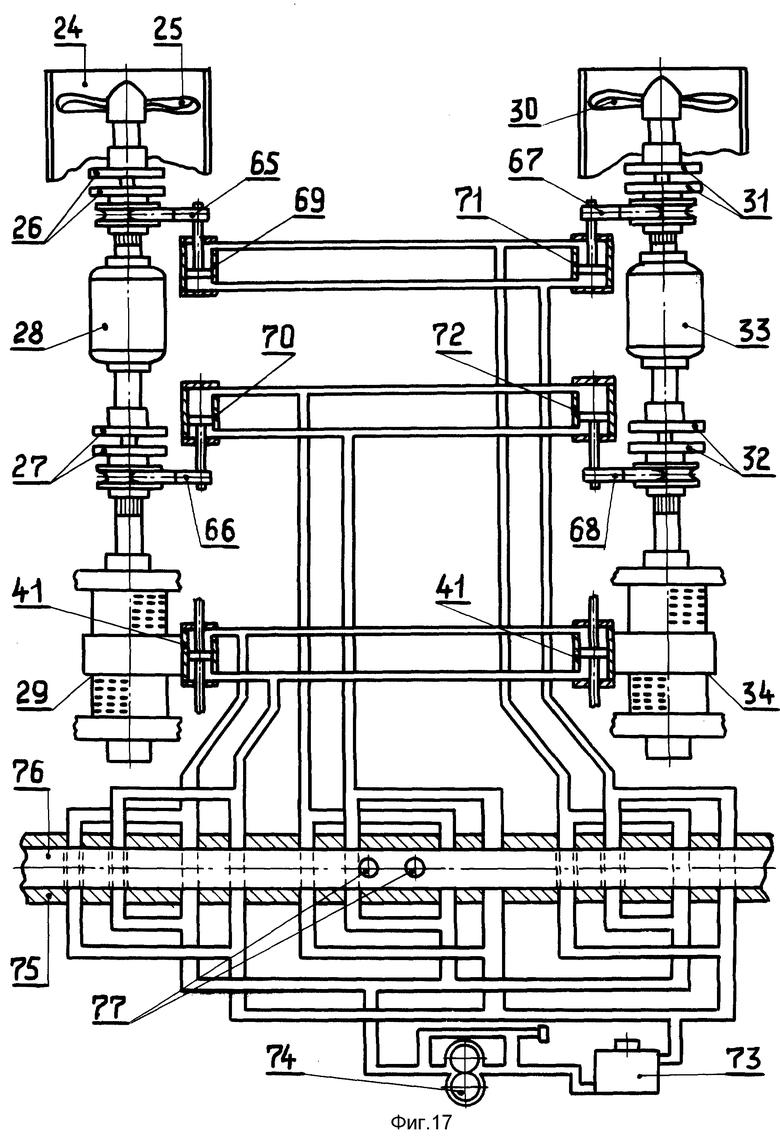
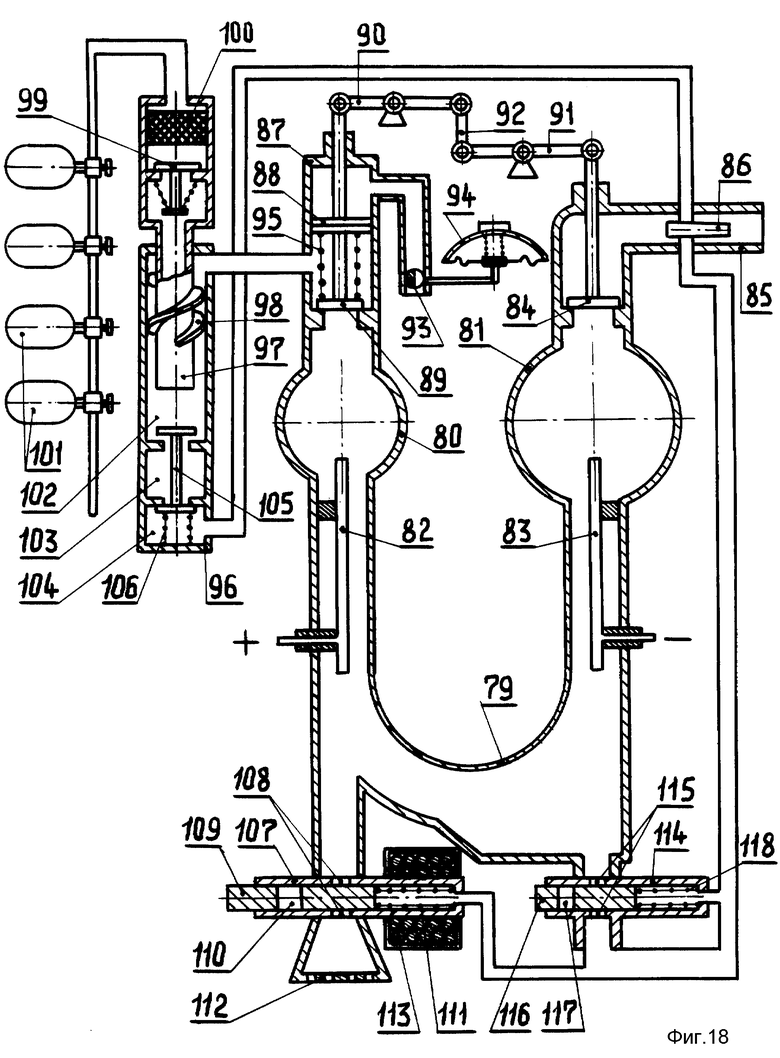
На фиг. 1 изображен общий вид подводного аппарата; на фиг.2 - вид на подводный аппарат сверху; на фиг. 3 - вид на подводный аппарат в разрезе; на фиг. 4 - общий вид гидростатического двигателя; на фиг. 5 - разрез по А-А фиг. 4; на фиг. 6 - вид на гидростатический двигатель сверху; на фиг. 7 - разрез по А-А фиг. 6; на фиг. 8 - общий вид ротора гидростатического двигателя; на фиг. 9 - разрез по А-А фиг. 8; на фиг. 10 - разрез по Б-Б фиг. 8; на фиг. 11 и 12 - схема сил, действующих на боковые стенки каналов ротора гидростатического двигателя; на фиг. 13 и 14 - принцип действия гидростатического двигателя при прямом и обратном вращении ротора; на фиг. 15 - схема регулирования мощности гидростатического двигателя; на фиг. 16 - схема привода и управления маршевым движителем; на фиг. 17 - схема привода и управления вертикальными движителями; на фиг. 18 - схема устройства подводной кислородной установки.
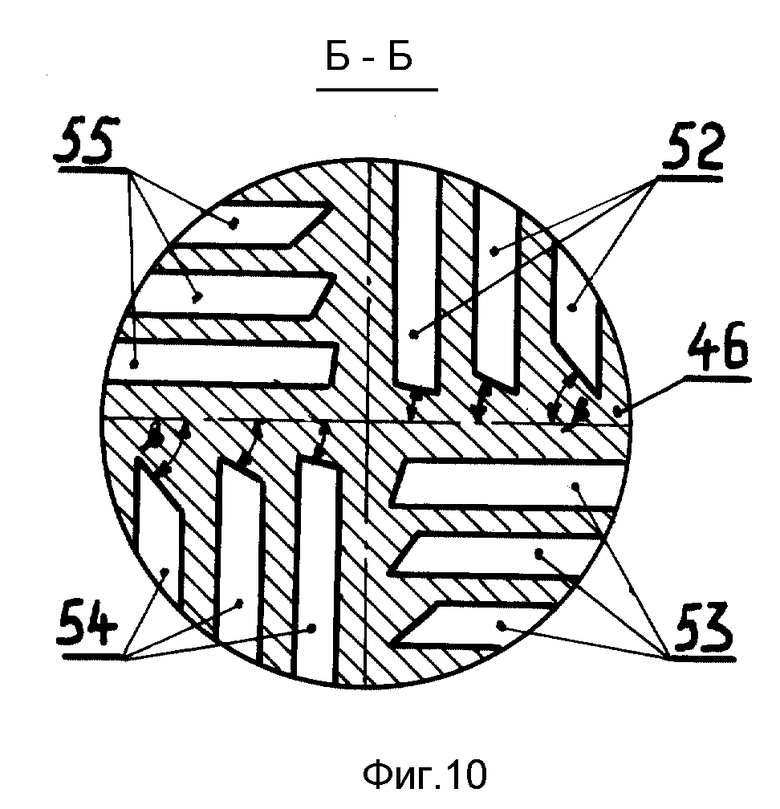
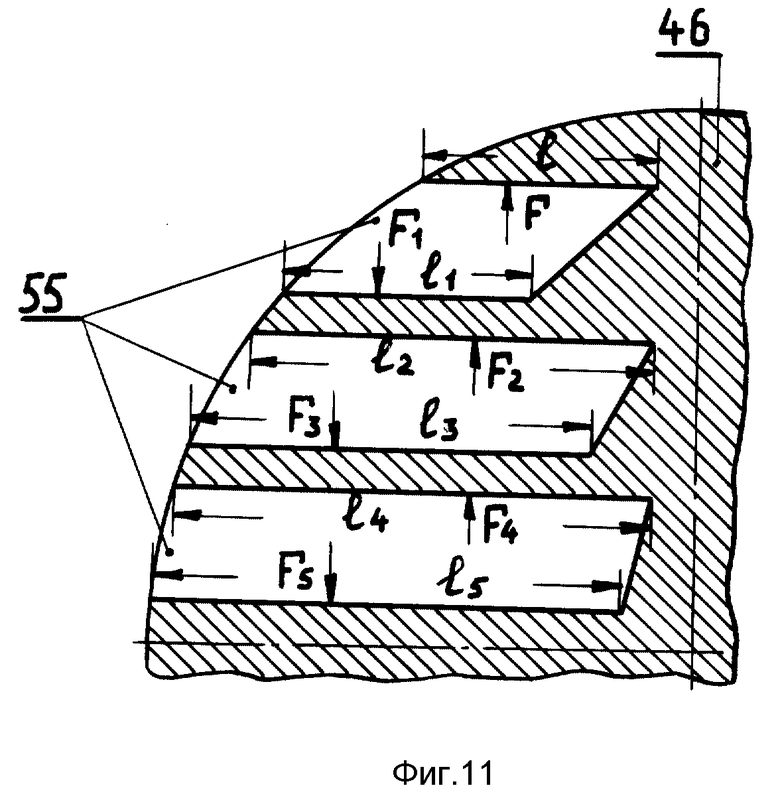
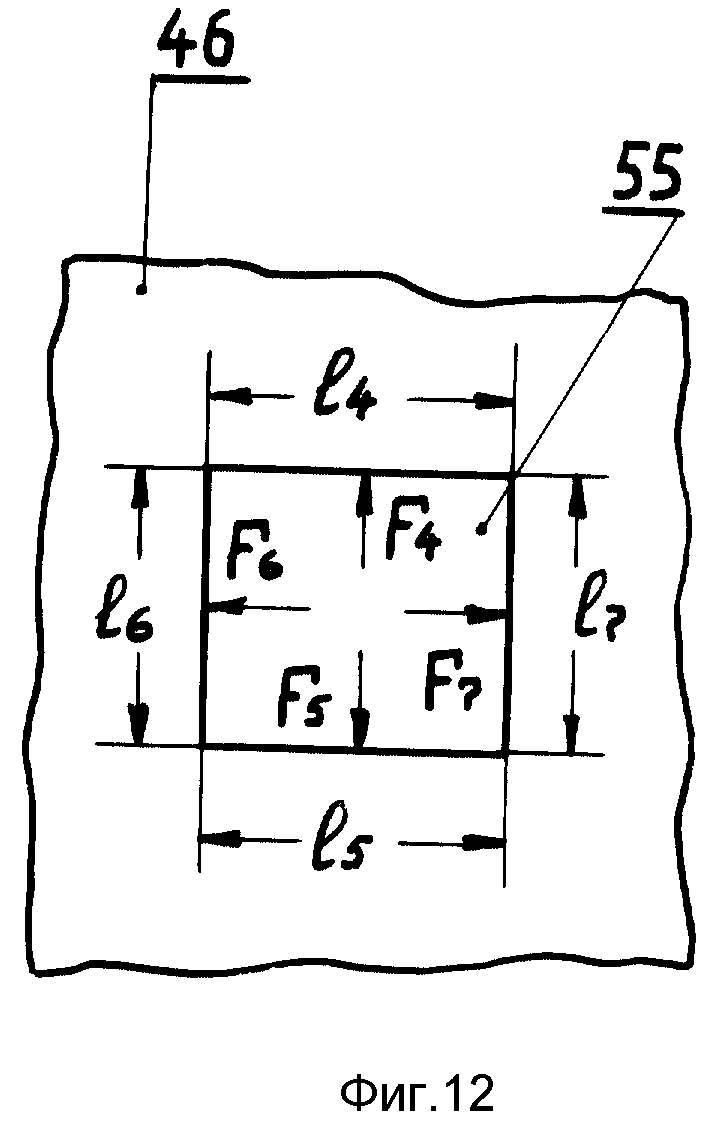
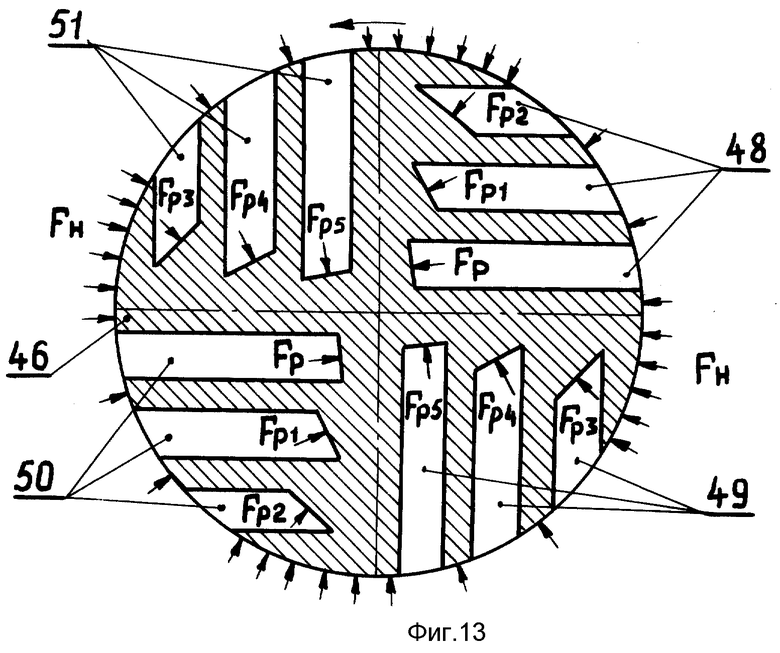
Предлагаемый подводный аппарат содержит прочный сферический корпус 1, имеющий иллюминаторы 2, в котором размещен экипаж и установлена аппаратура системы жизнеобеспечения, размещенный внутри легкого корпуса 3 веретенообразной формы, имеющего в верхней части рубку 4, внутрь которой выходит входной люк 5 прочного корпуса. В задней части легкий корпус имеет горизонтальный 6 и вертикальные 7 рули. Внутри задней части легкого корпуса установлены балластная цистерна 8, погружные аккумуляторные батареи 9, баллоны сжатого воздуха 10 системы продувки балластной цистерны, задняя дифферентовочная цистерна 11. Маршевый движитель 12, установленный в кольце 13, посредством соединительных муфт 14 и 15 и погружного электродвигателя постоянного тока 16 соединен с маршевым гидростатическим двигателем 17. В передней части легкого корпуса размещены горизонтальный двигатель 18, представляющий собой гребной винт, установленный в канале и механически соединенный с электродвигателем, не показанным на чертеже, носовая дифферентовочная цистерна 19, установка получения кислорода 20 с баллонами 21, плита 22 для крепления научно-исследовательских приборов с установленным на ней манипулятором 23. В передней части легкого корпуса выполнен сквозной вертикальный канал 24, внутри которого размещен передний вертикальный движитель, содержащий гребной винт 25, соединительные муфты 26 и 27, погружной электродвигатель 28 и гидростатический двигатель 29. В задней части легкого корпуса выполнен сквозной вертикальный канал, в котором установлен задний вертикальный движитель, содержащий гребной винт 30, соединительные муфты 31 и 32, погружной электродвигатель постоянного тока 33 и гидростатический двигатель 34. Все три гидростатических двигателя имеют одинаковое устройство и каждый из них содержит опорную плиту 35 с отверстиями для крепления, к которой болтами привернуты две боковые стойки 36 и 37. В верхней части обе стойки соединены шпилькой 38, а в нижней части они закреплены штоком 39, который выполнен как одно целое с поршнем 40, вставленным в цилиндр 41, закрытый с обеих сторон крышками 42 и 43 и выполненным заодно с кольцом 44, имеющим направляющую 45, охватывающую шпильку. Внутрь кольца вставлен и закреплен в подшипниках стоек ротор 46, выполненный в форме сплошного цилиндрического тела заодно с выходным валом 47, имеющим шлиц. В передней части ротора выполнены глухие, открывающиеся наружу каналы квадратного или круглого сечения, расположенные в несколько рядов, причем в каждом ряду каналы разбиты на четыре группы 48 - 51 и лежат в одной плоскости. Дно каждого из каналов выполнено под углом α к линии, проходящей через центр вращения и разделяющей две группы противоположно направленных каналов. Это необходимо для того, чтобы площади передней и задней стенок (в направлении вращения ротора) были равны, а площади боковых стенок (в продольном направлении) также были равны между собой /фиг. 11 и 12/. Каждая последующая группа каналов смещена относительно предыдущей на угол 90 градусов /фиг. 9/. В задней части ротора выполнены глухие, открывающиеся наружу каналы квадратного или круглого сечения, расположенные в несколько рядов, причем в каждом ряду каналы разбиты на четыре группы 52 - 55 и лежат в одной плоскости. Дно каждого из каналов выполнено под углом β к линии, проходящей через центр вращения и разделяющей две группы противоположно направленных каналов. Каждая последующая группа каналов смещена относительно предыдущей на угол 90o /фиг. 10/. Каналы в задней части ротора смещены относительно каналов в передней части ротора на угол 90o. Соединительные муфты маршевого движителя имеют вилки 56, 57, кинематически связанные с поршнями гидроцилиндров 58, 59. Внутренние полости этих гидроцилиндров и внутренние полости гидроцилиндра гидростатического двигателя привода маршевого движителя посредством трубопроводов подключены к гидросистеме управления, содержащей масляный бак 60, масляный насос 61, приводимый в движение электродвигателем и имеющим редукционный клапан, шестиходовой кран управления, состоящий из корпуса 62 и золотника 63, имеющего два перепускных отверстия 64. Соединительные муфты вертикальных движителей посредством вилок 65 - 68 кинематически соединены с поршнями гидроцилиндров 69 - 72. Внутренние полости этих гидроцилиндров и полости гидроцилиндров гидростатических двигателей вертикальных движителей посредством трубопроводов соединены с гидросистемой, содержащей масляный бак 73, масляный насос 74, приводимый в движение электродвигателем и имеющий редукционный клапан, шестиходовой кран управления, состоящий из корпуса 75 и золотника 76, имеющего два перепускных отверстия 77. Свободные полости в легком корпусе заполнены пенопластом 78. Подводная установка получения кислорода состоит из прочного корпуса 79, выложенного изнутри изоляционным материалом U-образной формы, переходящего в верхней части в два шаровых сосуда 80 и 81, один из которых по объему в два раза больше другого. Внутри корпуса на изоляционных стойках закреплены анод 82 и катод 83, выводы которых подключены к источнику постоянного тока. В верхней части большой шаровой сосуд имеет выпускной клапан 84 и эжекторное устройство, состоящее из канала 85, внутри которого размещена форсунка 86. В верхней части малого шарового сосуда расположен цилиндр 87, в который вставлен поршень 88, с возможностью свободного перемещения, имеющий центральное отверстие и делящий внутренний объем на верхнюю и нижнюю полости. В нижней полости установлен выпускной клапан 89, шток которого проходит через отверстие в поршне и через рычаги 90 и 91, тягу 92 соединен с выпускным клапаном большого шарового сосуда. Верхняя полость цилиндра связана с окружающей водной средой посредством трубопровода с золотником 93, который кинематически соединен с мембраной регулятора давления 94. Выпускной клапан, размещенный в нижней полости цилиндра, связанного с малым шаровым сосудом, нагружен пружиной 95, а упомянутая полость посредством трубопровода соединена с циклоном, состоящим из корпуса 96, представляющего собой цилиндрический сосуд, внутрь которого вварена выхлопная труба 97, имеющая спиральное ребро 98 и в верхней части переходящая в цилиндр, внутри которого размещен выпускной клапан 99, фильтр 100, который пневматически соединен с кислородными баллонами 101. Корпус циклона разделен на три полости: верхнюю 102, среднюю 103 и нижнюю 104, которые связаны между собой двойным клапаном 105, нагруженным пружиной 106, причем нижняя полость посредством трубопровода соединена с форсункой эжекторного устройства. В нижней части U-образный корпус имеет впускной и выпускной управляемые клапаны. Впускной управляемый клапан состоит из корпуса 107 в форме стакана, имеющего впускные окна 108, золотника 109 с перепускным отверстием 110, нагруженного пружиной 111. Входное отверстие впускного управляемого клапана закрыто решеткой 112, его рабочая полость трубопроводом соединена с форсункой эжекторного устройства, а на корпус надета катушка соленоида 113, сердечником которой является золотник упомянутого клапана. Выпускной управляемый клапан состоит из корпуса 114 в форме стакана, имеющего выпускные окна 115, золотника 116 с перепускным отверстием 117, нагруженного пружиной 118. Рабочая полость и выходной канал клапана трубопроводом соединены с форсункой эжекторного устройства.
Работа подводного аппарата
После прибытия вспомогательного судна к месту погружения подводного аппарата на последнем проводят подготовительные работы, проверяют исправность всех систем и затем его посредством подъемного крана опускают на воду. Заняв свои рабочие места, экипаж начинает спуск на заданную глубину и движение в нужном направлении. Для этого открываются клапана и балластная цистерна 8 заполняется водой, затем начинается спуск, который можно ускорить включением электродвигателей 28, 33 вертикальных движителей 25, 30, при этом соединительные муфты 27 и 32 разъединены, а соединительные муфты 26 и 31 включены, гидростатические двигатели 29, 34 выключены. Достигнув необходимой глубины, подводный аппарат прекращает вертикальное движение, посредством дифферентовочных цистерн 19 и 11 ему придается горизонтальное положение и он начинает движение за счет маршевого движителя 12. Находясь на заданной глубине, подводный аппарат может совершать движение в вертикальной и горизонтальной плоскостях посредством электродвигателей 28, 33, 16 или гидростатических двигателей 29, 34, 17, при этом управление подводным аппаратом осуществляется горизонтальным 6 и вертикальными 7 рулями, а вращение вокруг вертикальной оси за счет горизонтального движителя 18, вращаемого электродвигателем, не показанным на чертеже. Принцип действия всех трех гидростатических двигателей одинаков и основан на использовании силы Архимеда, действующей на дно каждого из каналов в передней или задней части ротора и образующей несколько пар сил, точки приложения которых симметрично удалены по обе стороны от центра вращения. Для горизонтального движения подводного аппарата с помощью гидростатического двигателя 17 необходимо передвинуть и повернуть на 90o золотник 63 последовательно в положения, показанные на фиг. 16 пунктиром. При этом жидкость будет подаваться из бака 60 насосом 61 в одну из полостей и удаляться из другой гидроцилиндров 58, 59. Поршни этих гидроцилиндров переместятся вправо и включат соединительные муфты 14 и 15. Одновременно с этим жидкость удаляется из левой полости и поступает в правую полость гидроцилиндра управления 41 гидростатического двигателя 17. Корпус указанного гидроцилиндра смещается влево и вместе с ним в ту же сторону перемещается кольцо 44 и закрывает задние каналы 52 - 55. Окружающая подводный аппарат вода поступает во все группы передних каналов 48 - 51 и производит давление на боковые стенки и дно каждого из упомянутых каналов. Так как размеры боковых стенок равны l = l1, l2 = l3, l4 = l5, l6 = l7, то площади противоположных стенок также равны. Следовательно, силы, действующие на эти стенки, также равны и уравновешивают друг друга F = F1, F2 = F3, F4 = F5, F6 = F7 /фиг. 11 и 12 /. Сила Архимеда, действующая на дно каждого из каналов 48 - 51, ничем не уравновешена и создает пары оил Fp, Fp1, Fp2, Fp3,Fp4, Fp5, точки приложения которых симметрично удалены от центра вращения /фиг. 13/. Эти пары сил заставляют ротор 46 вращаться и через соединительные муфты 14, 15, электродвигатель 16 приводить во вращение гребной винт 12, создающий упор и заставляющий подводный аппарат двигаться вперед. Электродвигатель 16 при этом работает в режиме генератора постоянного электрического тока. Полученная электроэнергия поступает на зарядку аккумуляторных батарей 9. Чем больше глубина погружения, тем больше давление на дно каждого канала и тем больше мощность на валу 47 гидростатического двигателя, частота вращения которого будет определяться нагрузкой. Время работы гидростатического двигателя, находящегося на достаточной глубине, не ограничено. Для обеспечения движения подводного аппарата задним ходом необходимо передвинуть вправо на одну ступень и повернуть на 90o золотник 63 шестиходового крана управления маршевым гидростатическим двигателем /на фиг. 16 показано двумя пунктирными линиями/. Жидкость из бака 60 насосом 61 станет подаваться в гидроцилиндр управления 41, который станет смещаться вправо и передвинет в ту же сторону втулку 44, которая, перемещаясь, закроет передние группы каналов 48 - 51 и откроет задние группы каналов 52 - 55. Сила Архимеда, как описано выше, производит давление на дно каждого из задних каналов и создает пары сил, приложенные к ротору 46 и заставляющие его вращаться. Но так как задние группы каналов смещены относительно передних групп каналов, то вращение ротора будет происходить в обратном направлении /фиг. 14/. Для остановки гидростатического двигателя 17 необходимо посредством шестиходового крана переместить и зафиксировать в среднем положении втулку 44. В этом случае передние и задние каналы окажутся открытыми и вода, попавшая в передние каналы, будет стремиться повернуть ротор в прямом направлении, а вода, попавшая в задние каналы, будет стремиться повернуть ротор в противоположном направлении. Так как силы, действующие в том и другом направлениях, одинаковы, то ротор остановится и будет неподвижен. Скорость движения подводного аппарата можно изменять путем увеличения или уменьшения мощности гидростатического двигателя. Это достигается закрытием одного или нескольких рядов передних или задних каналов, что ведет к изменению сил, действующих в прямом и обратном направлениях. На фиг. 15 показано пунктиром, что ротор вращается в обратном направлении с минимальной мощностью. Максимальная мощность в обратном направлении будет тогда, когда втулка 44 полностью перекроет передние каналы. Кроме того, наружные силы жидкости Fн, действующие на ротор, не препятствуют вращению ротора и не создают дополнительного вращающего момента потому, что вектор действия этих сил проходит через центр вращения /фиг. 13 и 14/. При отсутствии необходимости вертикального перемещения подводного аппарата под водой посредством соединительных муфт 26 и 31 гребные винты 25 и 30 отключаются передвижением золотника 76 вправо и поворотом его на 90o /на фиг. 17 показано пунктиром/. Жидкость насосом 74 из бака 73 подается в цилиндры 69 и 71, поршни, перемещаясь, отключают гребные винты. Напротив, две другие соединительные муфты 27 и 32 и оба гидростатических двигателя 29 и 34 включены. При этом последние вращают электродвигатели 28 и 33 и они, работая в режиме генераторов, вырабатывают электроэнергию, которая поступает на зарядку аккумуляторных батарей 9, если есть в этом необходимость. Электрические цепи в режиме использования электродвигателей в качестве генераторов должны быть оборудованы диодными матрицами, не показанными на чертеже, обеспечивающими необходимую полярность постоянного электрического тока, при изменении направления вращения генераторов при реверсе тех или иных движителей. Для увеличения скорости движения подводного аппарата в горизонтальной или вертикальной плоскостях гидростатические двигатели могут работать совместно с соответствующими электродвигателями, а для более быстрого маневрирования вертикальные и горизонтальный движители могут приводится только электродвигателями. Наличие на борту подводного аппарата нескольких дополнительных генераторов постоянного тока дает возможность использовать более мощные осветительные приборы, применить обогрев рабочих мест экипажа, установить дополнительную аппаратуру. Кроме того, часть электроэнергии, вырабатываемой электродвигателями 16, 29, 34, работающими в режиме генераторов, может быть использована для получения кислорода. Подводная кислородная установка работает следующим образом. В момент погружения подводного аппарата клапаны 89, 84 и золотники 109, 116 закрыты и внутри U-образного сосуда находится воздух. Как только будет достигнута необходимая глубина нажатием кнопки, не показанной на чертеже, пускается ток в обмотку соленоида 113. Возникшее магнитное поле втягивает золотник 109, который, перемещаясь вправо, открывает доступ забортной воде внутрь U-образного сосуда. Вода сжимает находящийся там воздух. При этом под давлением забортной воды сжимается мембрана регулятора 94, преодолевая сопротивление пружины. Золотник 93 поворачивается на соответствующий угол, регулируя давление воды, поступающей в цилиндр 87 и перемещающей поршень 88, который увеличивает на необходимую величину силу пружины 95. Затем соленоид 113 отключается, а золотник 109 под действием пружины 111 перемещается влево и закрывает доступ забортной воде в U-образный сосуд. После этого подается постоянный ток на анод 82 и катод 83. В результате прохождения электрического тока через морскую воду она разлагается на кислород у анода и водород у катода. Кислород скапливается в верхней части малого сферического сосуда 80, а водород /по объему в два раза больше/ скапливается в верхней части большого сферического сосуда 81. Растворенные в морской воде соли при этом опускаются в нижнюю часть U-образного сосуда, увеличивая ее концентрацию в нижней части. Как только давление кислорода станет значительно выше, чем давление на клапан 89, он поднимается вверх и через рычаги 90, 91, тягу 92 открывает клапан 84. При этом кислород по трубопроводу попадает в корпус 96 циклона, где, совершая вращательное движение, освобождается от попавшей вместе c ним воды, которая стекает в верхнюю полость 102, закрывая двойной клапан 105. Далее кислород проходит через выхлопную трубу 97, открывая клапан 99, фильтр 100 и поступает в баллоны 101. Одновременно c этим водород через открытый клапан 84 выбрасывается в трубу 85 эжекторного устройства, создавая в ней разрежение. Вследствие этого золотник 109 входного управляемого клапана перемещается вправо, сжимая пружину 111 и впускает новую порцию воды в U-образный сосуд, а золотник 116 управляемого выпускного клапана также перемещается вправо, сжимая пружину 118. Под действием разрежения часть воды, обогащенной солями, удаляется из нижней части U-образного сосуда и по трубопроводу выбрасывается наружу через форсунку 86. Скопившаяся в нижней полости 104 циклона вода за счет разрежения также выбрасывается через форсунку 86. После прекращения разрежения золотники 109, 116 под действием пружин 111, 118 смещаются влево и закрывают доступ забортной воде внутрь U-образного сосуда. Клапаны 89 и 84 закрываются и процесс повторяется снова. После заполнения баллонов 101 установка отключается После выполнения намеченной программы производится всплытие, которое может осуществляться с помощью рулей глубины 7 при горизонтальном движении с одновременной продувкой балластной цистерны 8 сжатым воздухом из баллонов 10. В случае отсутствия горизонтального движения всплытие производится посредством гребных винтов 25 и 30, приводимых в движение электродвигателями 28, 33 или гидростатическими двигателями 29, 34, мощность которых будет уменьшаться до нуля при приближении к поверхности. При аварийной ситуации, когда полностью израсходован запас сжатого воздуха в баллонах 10 для продувки балластной цистерны 8, можно использовать кислородные баллоны 101 (не показаны).
Положительный эффект изобретения: увеличение автономности, запаса хода и времени пребывания под водой, повышение безопасности, увеличение скорости движения.
Предлагаемому изобретению прошу присвоить имя автора и именовать: "Подводный аппарат B.C. Григорчука".
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ АППАРАТ | 1998 |
|
RU2137659C1 |
| ПОДВОДНЫЙ АППАРАТ | 2013 |
|
RU2515815C1 |
| ПОДВОДНЫЙ АППАРАТ С ЕДИНЫМ ДВИГАТЕЛЕМ ДЛЯ НАДВОДНОГО И ПОДВОДНОГО ХОДА | 2001 |
|
RU2197408C2 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2006 |
|
RU2301750C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2013 |
|
RU2538484C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2005 |
|
RU2289519C1 |
| Аэродинамическое судно | 2015 |
|
RU2609577C1 |
| АЭРОМОБИЛЬ | 2019 |
|
RU2715099C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2011 |
|
RU2470808C1 |
| Аэродинамическое судно | 2019 |
|
RU2710040C1 |
Изобретение относится к судостроению, в частности к конструкции подводных аппаратов. Подводный аппарат содержит прочный и легкий корпуса, источник электроэнергии, горизонтальный и вертикальные электродвигатели с гребными винтами, балластную и дифферентовочные цистерны, горизонтальные и вертикальные рули, механизмы управления. В легком корпусе размещены три гидростатических двигателя, кинематически связанных с горизонтальными и вертикальными движителями, бортовая кислородная установка. Когда аккумуляторная батарея заряжена, то движение подводного аппарата может осуществляться посредством электродвигателей. При ее разряде движение осуществляется за счет гидростатических двигателей, которые наряду с гребными винтами приводят в движение и электродвигатели, работающие при этом в режиме генераторов постоянного электрического тока, подзаряжающих аккумуляторную батарею и обеспечивающих электроэнергией кислородную установку, работающую по принципу электролиза морской воды. Описанная конструкция позволяет повысить эксплуатационные качества подводного аппарата. 6 з.п.ф-лы, 18 ил.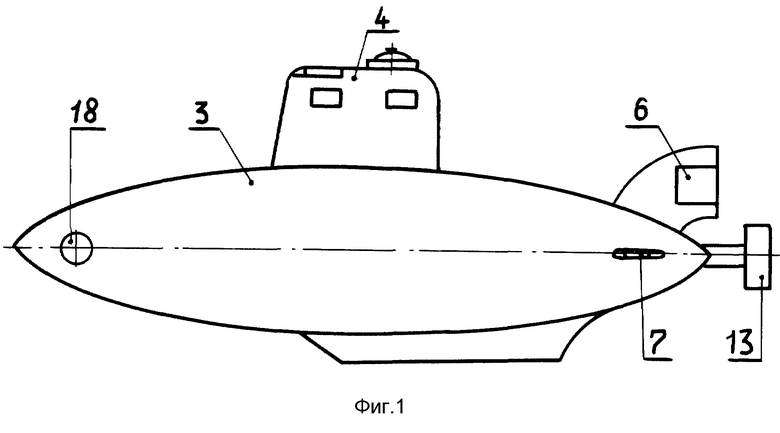
| Морской энциклопедический словарь/ Под ред | |||
| В.В.Дмитриева | |||
| - СПб.: Судостроение, 1993, с | |||
| СПОСОБ ПОЛУЧЕНИЯ ПРОДУКТОВ КОНДЕНСАЦИИ ФЕНОЛОВ С ФОРМАЛЬДЕГИДОМ ИЛИ ЕГО ПОЛИМЕРАМИ | 1925 |
|
SU513A1 |
| Управляемый по кабелю самоходный необитаемый подводный аппарат | 1991 |
|
SU1819794A1 |
| US 3521589 А, 21.07.70 | |||
| DE 3128268 А1, 03.02.83. | |||
