Изобретение относится к области судостроения и может найти применение в качестве подводного аппарата.
Известен подводный аппарат-транспортировщик, содержащий негерметичный легкий корпус, имеющий кабину для экипажа, аккумуляторный отсек с аккумуляторными батареями, балластную цистерну, баллоны сжатого воздуха, гребной винт с электродвигателем. Водоизмещение 0,4-12 т, дальность плавания 2-6 км, экипаж 2 - 3 чел., глубина погружения 40 - 120 м (Морской энциклопедический словарь под ред. В. В. Дмитриева, т. 2, К-П, Судостроение, СПб, 1993, с. 514).
Недостатками известного подводного аппарата-транспортировщика являются: небольшая глубина погружения, малая дальность плавания.
Указанные недостатки обусловлены конструкцией подводного аппарата.
Известен также подводный аппарат Стар III, содержащий легкий корпус, прочный корпус с иллюминаторами, балластную цистерну, дифферентовочные цистерны, аккумуляторные батареи, вертикальный и горизонтальный гребные винты с электродвигателями, платформу для научной аппаратуры, манипулятор (там же, с. 513; Диомидов М.Н., Дмитриев А.Н. Покорение глубин, изд. 4-ое, -Л.: Судостроение, 1974, с. 174-176).
Известный подводный аппарат Стар III, как наиболее близкий по технической сущности и достигаемому полезному результату, принят за прототип.
Недостатки известного аппарата Стар III, принятого за прототип, те же.
Указанные недостатки обусловлены конструкцией подводного аппарата.
Целью настоящего изобретения является повышение эксплуатационных качеств подводного аппарата.
Указанная цель согласно изобретению обеспечивается тем, что прочный корпус заменен наружным и внутренним прочным корпусами, причем внутренний прочный корпус, установленный на шарикоподшипниках внутри наружного прочного корпуса и имеющий в торцевой части входной люк, выполнен невращающимся и изготовлен в форме цилиндра, выполненного как одно целое с валом, проходящим через отверстие наружного прочного корпуса и соединенным с рамой, установленной внутри легкого корпуса, а наружный прочный корпус также изготовлен в форме цилиндра, имеющего в торцевой части входной люк, выполнен вращающимся и установлен на шарикоподшипниках внутри двух круглых опор, закрепленных на упомянутой раме, гидростатическим двигателем, закрепленном на наружном прочном корпусе и представляющим собой диск со специальными каналами, пневмостатическим двигателем-генератором, представляющим собой герметичный корпус, пневматически соединенный с баллонами сжатого воздуха высокого давления, внутри которого установлен ротор, имеющий специальные каналы и постоянные магниты, впресованные в тело ротора, выполненные в форме двух круглых гребенок, входящими своими зубьями в промежутки друг друга, кроме того, на передней крышке корпуса закреплен статор генератора электрического тока, электрически соединенный с аккумуляторными батареями и пультом управления.
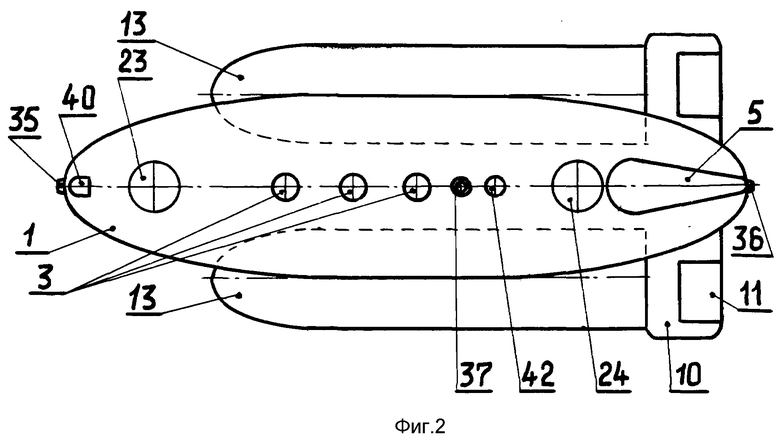
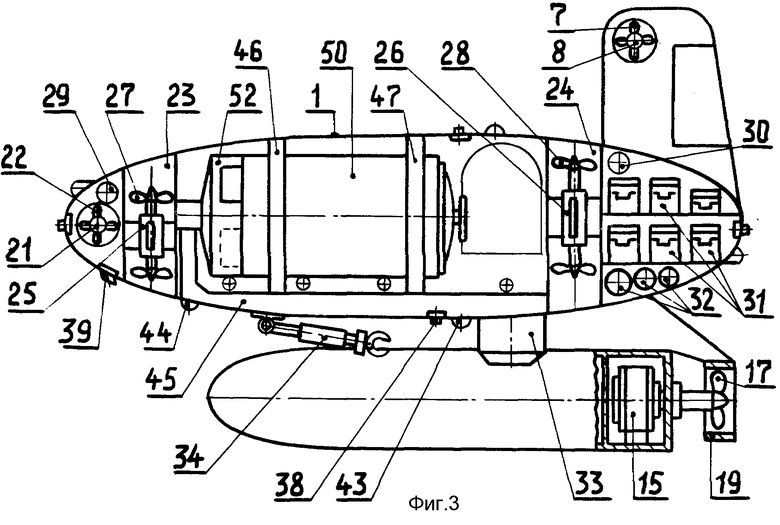
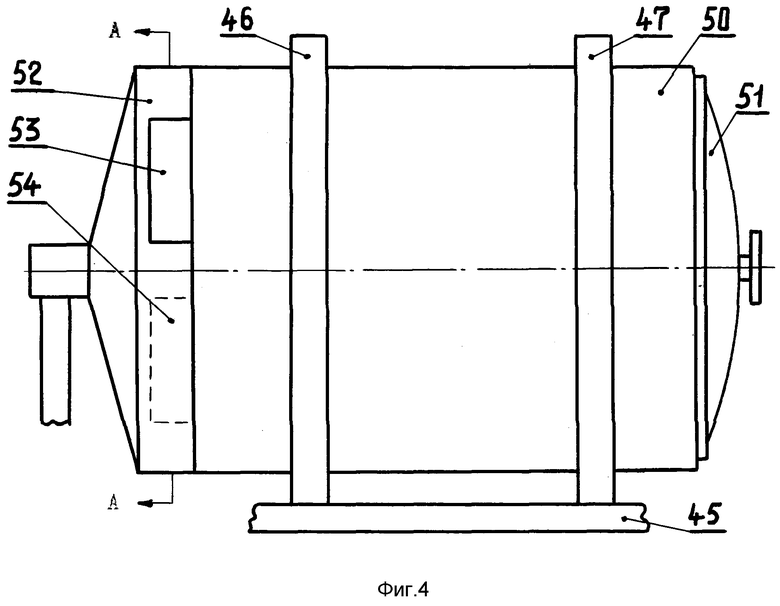
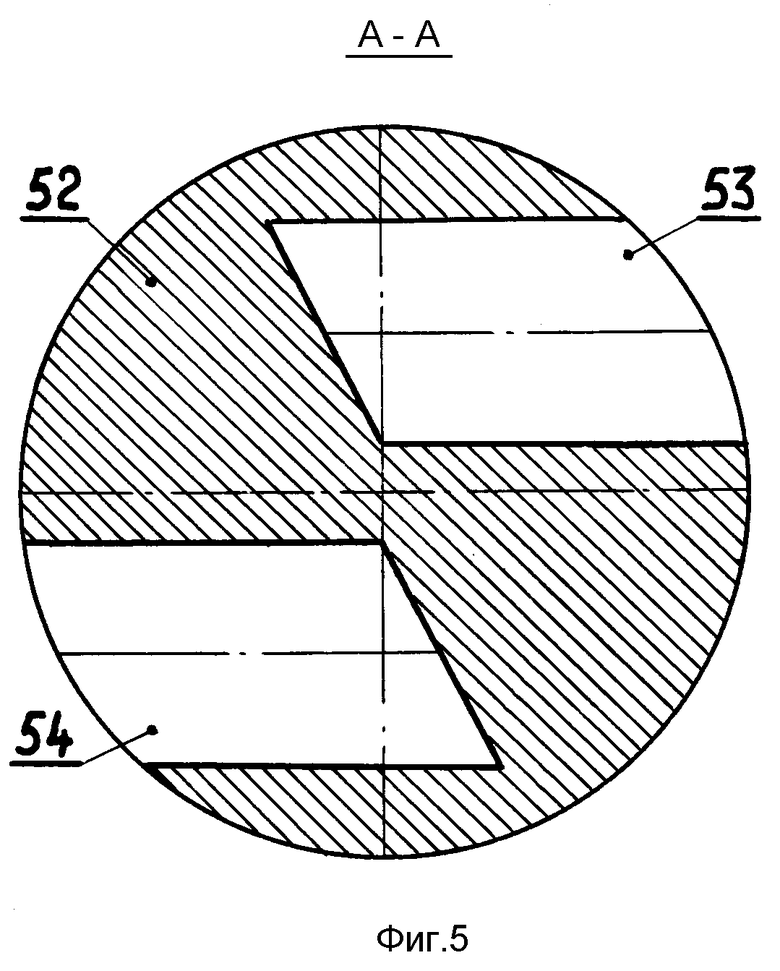
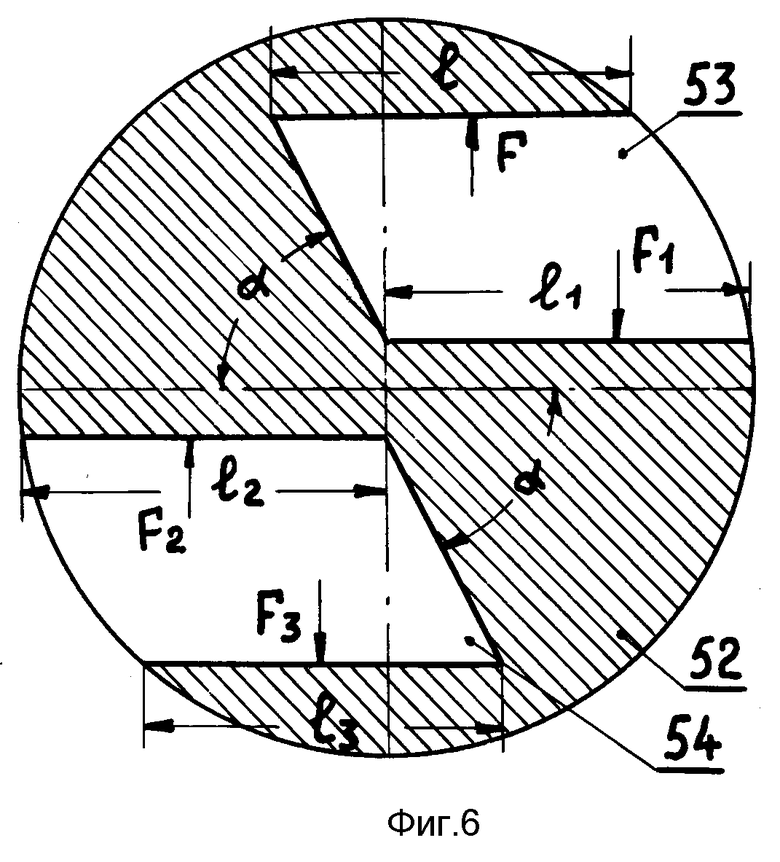
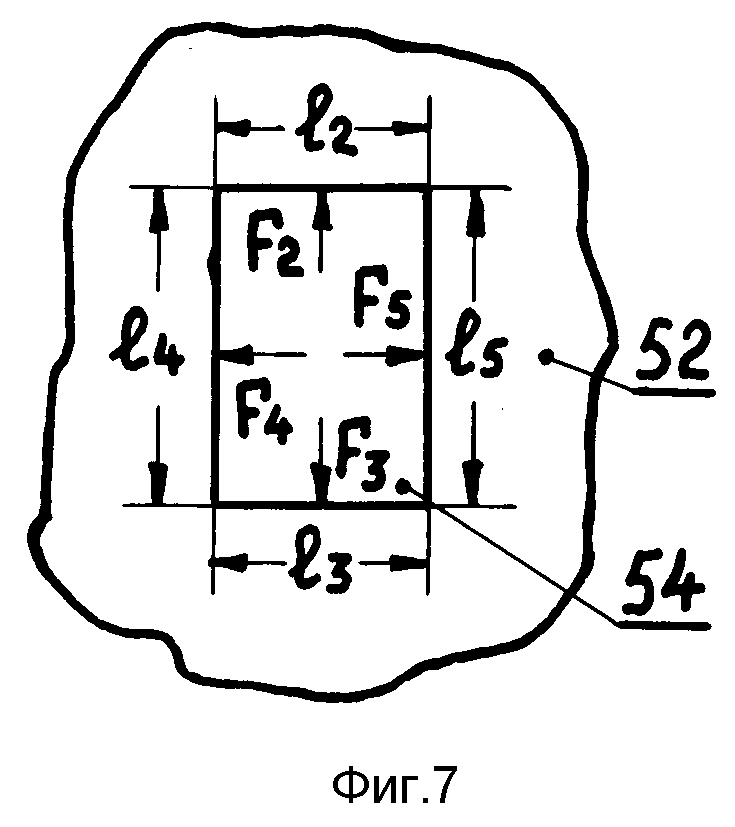
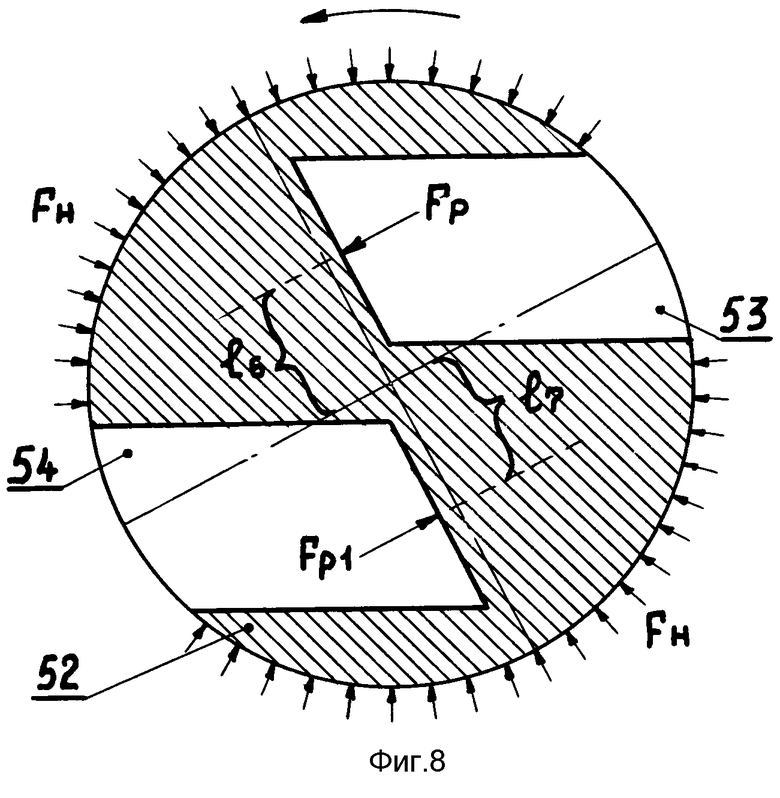
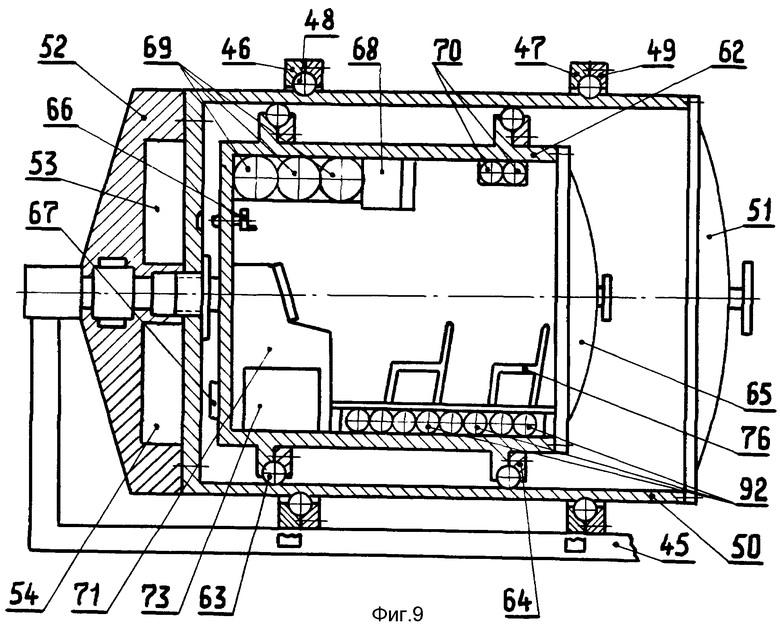
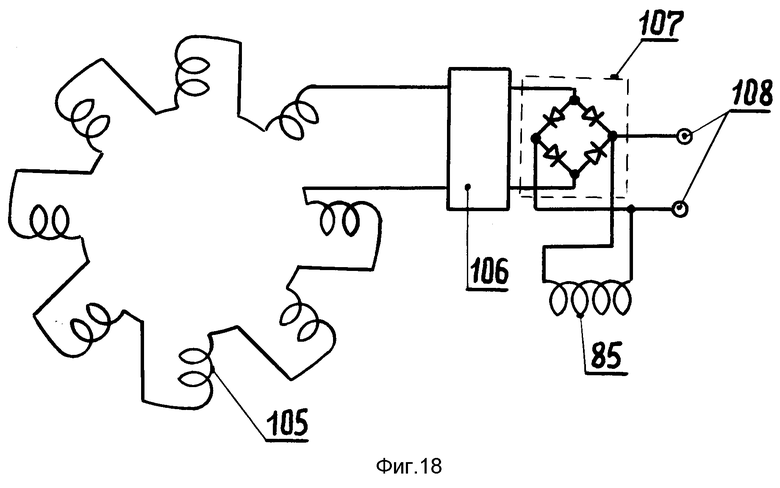
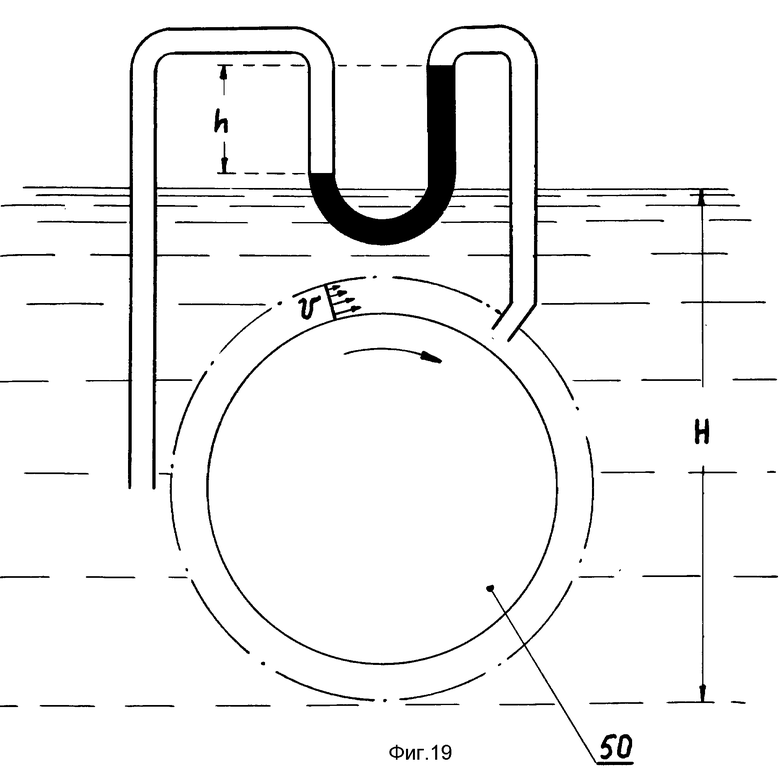
Сущность изобретения поясняется чертежами, где на фиг. 1 изображен общий вид подводного аппарата; на фиг. 2 - вид на подводный аппарат сверху; на фиг. 3 - продольный разрез подводного аппарата; на фиг. 4 - общий вид наружного прочного корпуса; на фиг. 5 - разрез по A-A на фиг. 4; на фиг. 6 и 7 - схема сил, действующих на боковые стенки каналов гидростатического двигателя; на фиг. 8 - схема создания вращающего момента на диске гидростатического двигателя; на фиг. 9 - продольный разрез наружного и внутреннего прочных корпусов; на фиг. 10 - поперечный разрез наружного и внутреннего прочных корпусов; на фиг. 11 - устройство уплотнительных сальников; на фиг. 12 - устройство заслонки канала гидростатического двигателя; на фиг. 13 - блок-схема силовой передачи подводного аппарата; на фиг. 14 - продольный разрез пневмостатического двигателя-генератора; на фиг. 15 - общий вид ротора пневмостатического двигателя; на фиг. 16 - разрез по A-A на фиг. 15; на фиг. 17 - вид на статор генератора электрического тока при снятой крышке; на фиг. 18 - электрическая схема генератора электрического тока; на фиг. 19 - схема уменьшения давления забортной воды на наружный прочный корпус подводного аппарата.
Предлагаемый подводный аппарат содержит сигарообразный легкий корпус 1, имеющий нижние 2 и верхние 5 отверстия для прохода воды, боковые вырезы 4 для прохода внутрь, вертикальный стабилизатор 5, на котором установлены горизонтальный руль 6 и гребной винт 7 с электродвигателем 8 для поворота легкого корпуса вокруг продольной оси, размещенных в канале 9.
В задней части легкого корпуса также размещены горизонтальные стабилизаторы 10 с вертикальными рулями 11. В нижней части легкого корпуса на вертикальных стойках 12 установлены балластные цистерны 15, выполненные в форме двух сигарообразных корпусов, в задних частях которых размещены электродвигатели 14 и 15, механически соединенные с гребными винтами 16 и 17, установленными в кольцевых каналах 18 и 19. В передней части легкого корпуса выполнен горизонтальный канал 20, в котором установлен электродвигатель 21 с гребным винтом 22. Внутри легкого корпуса выполнены передний 23 и задний 24 вертикальные каналы, в которых установлены электродвигатели 25 и 26, соединенные с гребными винтами 27 и 28. Там же размещены передняя 29 и задняя 30 дифферентовочные цистерны.
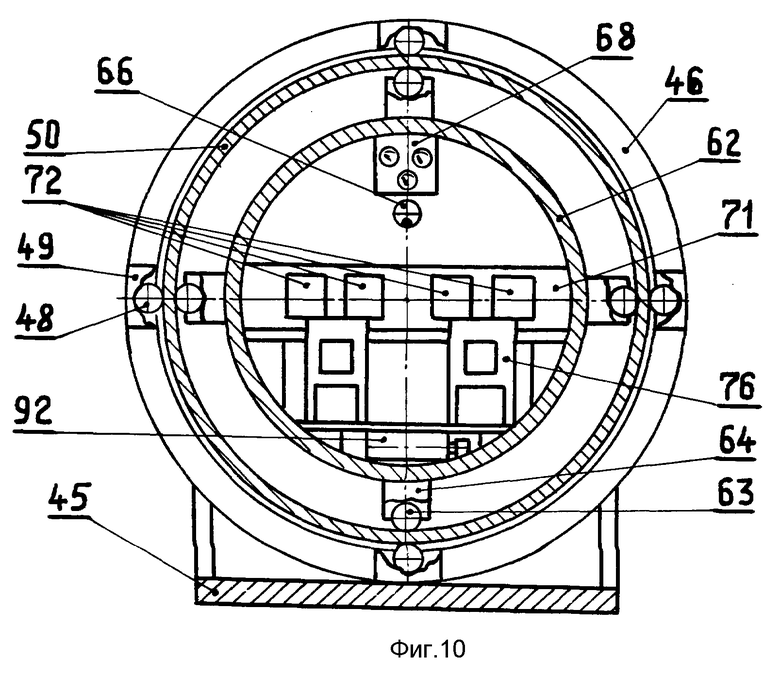
В задней части легкого корпуса расположен аккумуляторный отсек, в котором установлены аккумуляторные батареи 31, под которыми расположены баллоны 32 сжатого воздуха высокого давления для продувки балластных цистерн, между которыми закреплен балластный ящик 33, заполненный дробью и имеющий электромагнитный затвор. Под легким корпусом в передней части закреплен манипулятор 34. Спереди, сзади, сверху и снизу на легком корпусе установлены телевизионные камеры 35, 36, 37, 38, а в передней нижней части размещена дополнительная телевизионная камера 39 для наблюдения за работой манипулятора. Работу телевизионных камер обеспечивают источники света 40, 41, 42, 43, 44. Внутри легкого корпуса, в его нижней части размещена рама 45, на которой установлены две круглые направляющие 46 и 47, внутри которых на шарикоподшипниках 48, закрытых крышками 49, установлен наружный прочный корпус 50, выполненный в форме цилиндра и имеющий на задней торцевой части люк, закрытый крышкой 51, к передней торцевой части которого прикреплен гидростатический двигатель, представляющий собой диск 52, имеющий два или более глухих, открывающихся в сторону от оси вращения, канала 53 и 54 прямоугольного или круглого сечения.
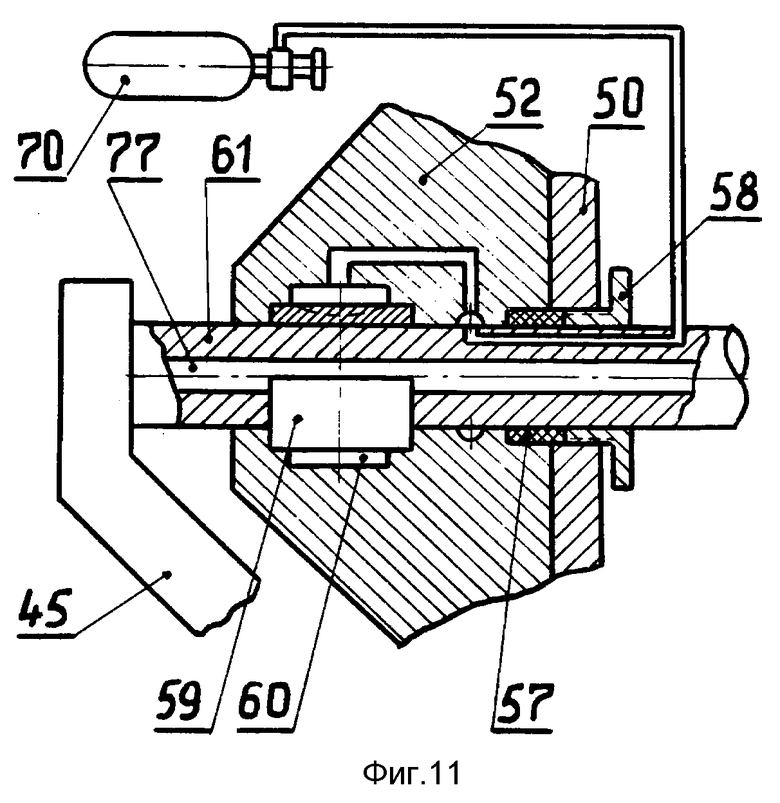
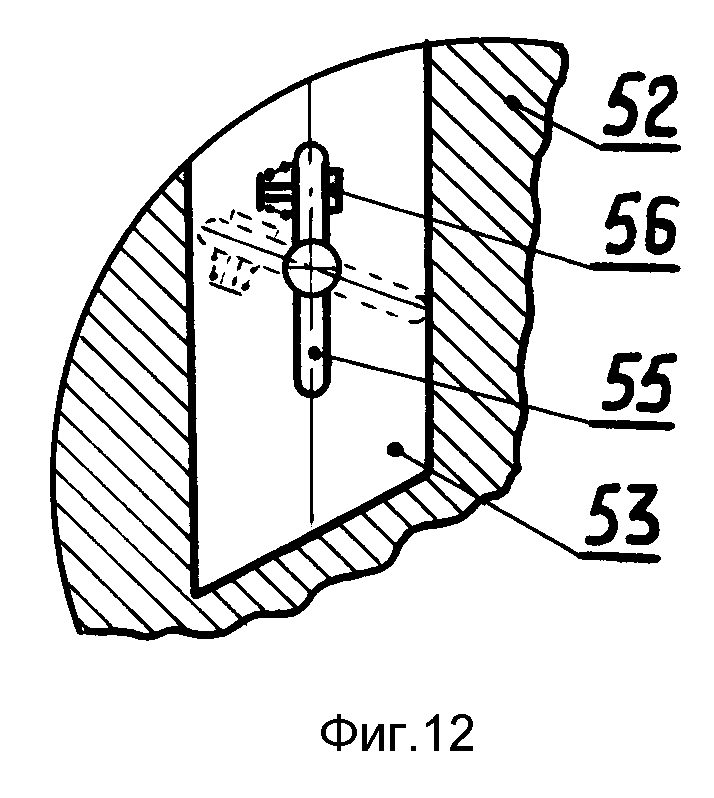
Дно каждого из каналов выполнено под углом α к линии, проходящей через центр вращения и разделяющей два противоположно направленных канала. Внутри каждого канала установлена заслонка 55 с выпускным клапаном 56, приводимая в движение гидродвигателем, не показанным на чертеже. Диск гидростатического двигателя имеет поджимной сальник 57 с гайкой 58 и автоматический сальник, содержащий гнездо, в которое вставлено кольцо 59, выполненное из прочного и гибкого материала. Над кольцом выполнен круглый канал 60, который соединен посредством трубопроводов и сверлений внутри диска и пустотелого соединительного вала 61, пропущенного через отверстие диска гидростатического двигателя и прикрепленного одним концом к раме, а другим концом соединенного с внутренним прочным корпусом 62, установленным на шарикоподшипниках 63, закрытых крышками 64 и опирающихся на внутреннюю поверхность наружного прочного корпуса. Внутренний прочный корпус, выполненный в форме цилиндра, содержит на задней торцевой стороне входной люк, закрытый крышкой 65. На передней торцевой части внутренний прочный корпус имеет фиксатор 66 и тормозное устройство 67. Внутри внутреннего прочного корпуса размещены: установка 68 поддержания температуры, влажности, подготовки и регенерации дыхательной смеси с кислородными баллонами 69, баллоны сжатого воздуха 70 автоматического сальника, пульт управления 71 с телевизионными мониторами 72, электрически соединенными с телевизионными камерами, имеющий внутри машинное отделение 73, в котором размещен пневмостатический двигатель-генератор 74, электрически подключенный через реле обратного тока 75 к аккумуляторным батареям и пульту управления, кресла экипажа 76.
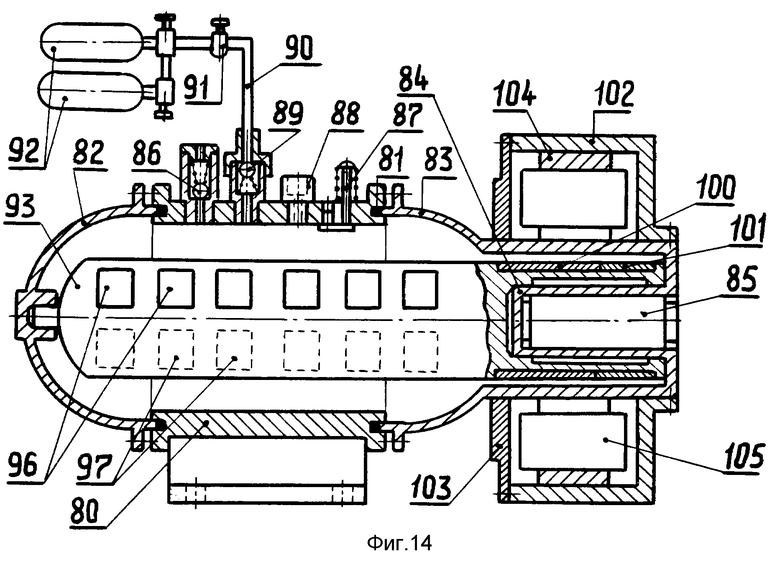
Пульт управления электрически, пневматически и гидравлически связан с соответствующими механизмами через отверстие 77 в соединительном валу. Пневмостатический двигатель-генератор состоит из пневмостатического двигателя 78 и генератора 79. Пневмостатический двигатель содержит корпус 80, к которому привернуты болтами и уплотнены прокладками 81 передняя крышка 82 и задняя крышка 83, выполненная из немагнитного и прочного материала, имеющая внутреннее цилиндрическое углубление 84, входящее внутрь торца ротора и являющееся одним из его подшипников. Второй конец ротора вставлен в подшипник передней крышки. Внутрь углубления задней крышки вставлена катушка возбуждения 85. На корпусе пневмостатического двигателя расположены предохранительный клапан 86, выпускной клапан 87, штуцер 88 для соединения с манометром и выпускной клапан 89, корпус которого посредством трубопровода 90 через расходный кран 91 соединен с баллонами сжатого воздуха высокого давления 92, установленными под полом внутреннего прочного корпуса.
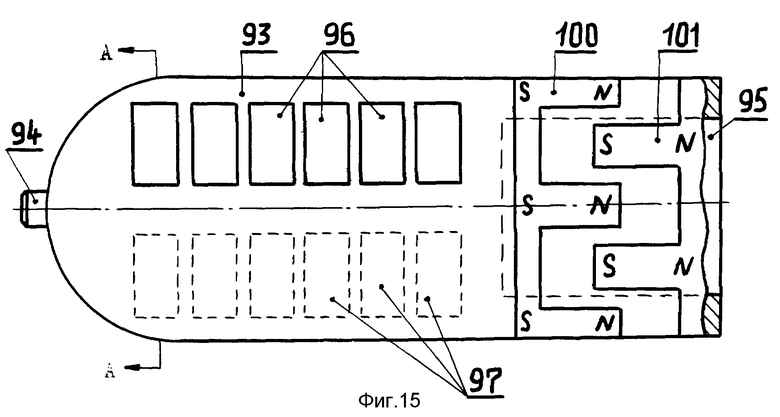
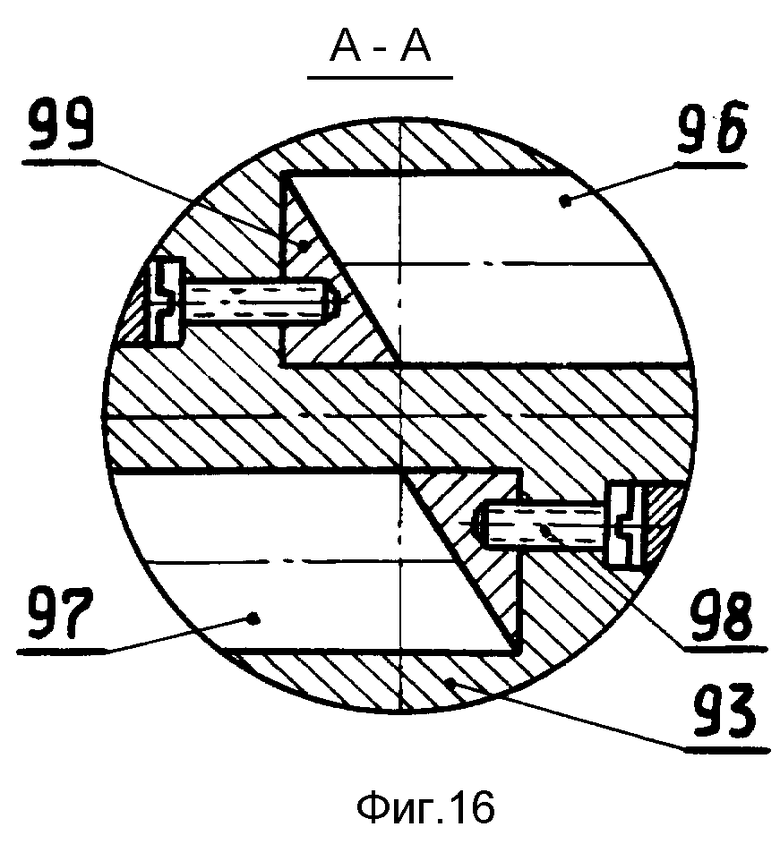
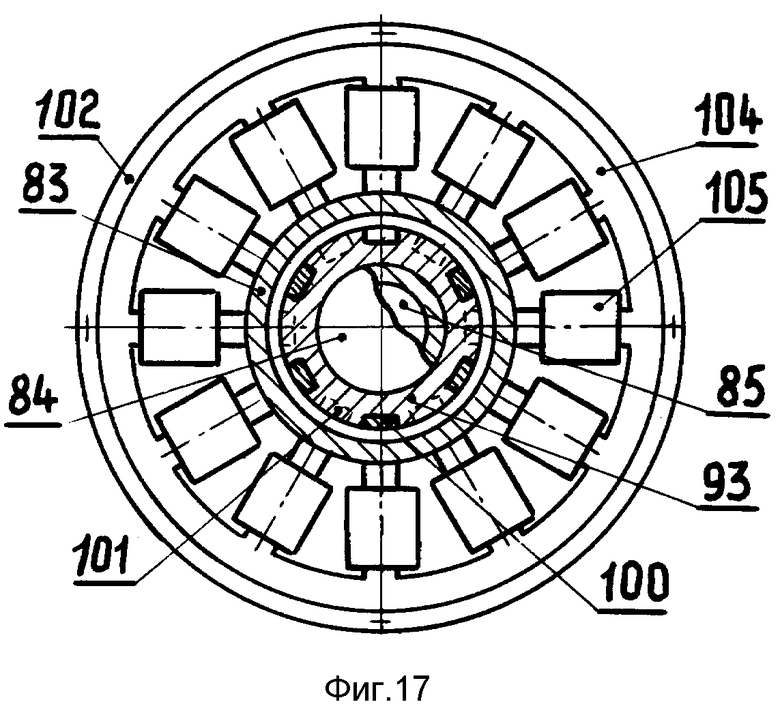
Ротор пневмостатического двигателя, выполненный из немагнитного материала, содержит цилиндрическое тело 93, имеющее в передней части шейку подшипника 94, а в задней части торцевое отверстие 95. В теле ротора выполнены в несколько рядов пары глухих, открывающихся в сторону от оси вращения, каналов 96 и 97 прямоугольного или круглого сечения. Внутрь каждого из каналов вставлен и закреплен болтом 98 вкладыш 99, установленный таким образом, что плоскость дна каждого из каналов расположена под углом к линии, проходящей через центр вращения и разделяющей два противоположно направленных канала (аналогично показанному на фиг. 6). Кроме того, в заднюю часть ротора впрессованы два постоянных магнита 100 и 101, выполненных в форме круглых гребенок, вставленных одна в другую. Генератор электрического тока представляет собой круглый корпус 102 с крышкой 103, которые имеют в центре отверстие, надеты и закреплены на задней крышке пневмостатического двигателя. Внутри корпуса установлен круглый магнитопровод 104, на ответвлениях которого закреплены катушки 105, соединенные друг с другом последовательно и подключенные к реле-регулятору 106, выход которого соединен с выпрямителем 107, который через клеммы 108 подключен к реле обратного тока.
Работа подводного аппарата.
После спуска подводного аппарата на воду, подготовки и проверки работы всех систем, экипаж занимает свои места во внутреннем прочном корпусе 62 и закрывает крышки 51 и 65 входных люков. Затем начинается заполнение балластных цистерн 13 водой и погружение подводного аппарата. Ускорение спуска может быть обеспечено включением электродвигателей 25 и 26, которые приводят в движение вертикальные гребные винты 27 и 28. Создаваемая ими дополнительная тяга в вертикальной плоскости ускоряет погружение. Кроме того, быстрое погружение можно осуществить включением электродвигателей 14 и 15, которые приводят в движение гребные винты 16 и 17 и двигают подводный аппарат вперед. Далее отклонением рулей глубины 11 вниз, обеспечивается разворот носовой части корпуса аппарата вниз и погружение с использованием силы тяги горизонтальных гребных винтов 16 и 17.
После того как подводный аппарат достигнет некоторой глубины, упор 66 отводится назад, освобождая наружный прочный корпус 50, посредством гидропривода, не показанного на чертеже, открываются заслонки 55 в каналах 53 и 54 (фиг. 12) и диск 52 гидростатического двигателя начинает вращаться. Вращающийся момент в гидростатическом двигателе возникает следующим образом. Забортная вода поступает в каналы 53 и 54. Выталкивающая сила Архимеда производит давление на боковые стенки упомянутых каналов. Площади противоположных боковых стенок каналов равны так, как l=l1; l2=l3; l4=l5 следовательно и силы, действующие на эти стенки, также равны и взаимно уравновешивают друг друга F= F1; F2=F3; F4=F5 (фиг. 6, 7). Силы же Fp и Fp1, действующие на дно каждого из каналов 53 и 54, ничем не уравновешены и образуют плечи сил l6 и l7. Эти силы действуют на диск 52 гидростатического двигателя, приводя его во вращение (фиг. 8), а вместе с ним и наружный прочный корпус 50.
При вращении наружного прочного корпуса вследствие смачивания его поверхности водой вместе с ним вращается со скоростью V и часть жидкости, прилегающая к нему. Чем ближе слой воды к поверхности наружного прочного корпуса, тем выше скорость его движения. Вследствие этого вокруг наружного прочного корпуса образуется движущийся поток воды, именуемый пограничным слоем. Из законов Бернулли следует, что чем выше скорость движения потока воды (пограничного слоя), тем ниже давление в нем. Если один конец жидкостного манометра опустить в пограничный слой, а другой конец опустить в пространство, окружающее подводный аппарата глубине H, то такой манометр покажет разность давлений h. Следовательно на глубине H давление воды на вращающийся наружный прочный корпус 50 будет меньше, чем оно было бы на данной глубине, если бы наружный прочный корпус не вращался (фиг. 19).
С увеличением глубины погружения повышается вязкость воды и также увеличивается энергия активации вязкого трения, что препятствует переходу ламинарного течения в турбулентное. Поэтому с увеличением глубины вследствие увеличения вязкости воды и скорости вращения наружного прочного корпуса движение воды в пограничном слое останется ламинарным, но толщина пограничного слоя будет увеличиваться, что уменьшит возможность разрушения наружного прочного корпуса возрастающим давлением воды при погружении на большие глубины. С увеличением глубины мощность, потребная для вращения наружного прочного корпуса 50, будет возрастать и компенсироваться возрастающей мощностью гидростатического двигателя, так как с увеличением глубины погружения будет увеличиваться сила давления на дно каждого из каналов 53 и 54.
При погружении на значительную глубину скорость вращения наружного прочного корпуса может превысить расчетную величину, что вызывает разрушение последнего. Для предотвращения этого частота вращения наружного прочного корпуса может быть ограничена путем закрытия одного из каналов заслонкой 55 или включением тормозного устройства 67. При вращении наружного прочного корпуса давление забортной воды уменьшается не только на боковую поверхность, но и на торцевые поверхности (на чертежах не показано). Момент от вращения наружного прочного корпуса компенсируется вертикальным стабилизатором 5, а в случае, если этого недостаточно, то включением электродвигателя 8, который приводит в движение гребной винт 7, создающий дополнительный упор. Гироскопический момент от вращения массы наружного прочного корпуса может быть компенсирован отклонением на небольшую величину в противоположную от вращения сторону руля направления 6.
В погруженном состоянии движение вперед, назад и торможение подводного аппарата осуществляется гребными винтами 16 и 17, приводимыми в движение электродвигателями 14 и 15, а изменение курса производится рулем 6. В случае, если нужно круто изменить курс или развернуть подводный аппарат вокруг вертикальной оси, то включается электродвигатель 21 в носовой части аппарата, и гребной винт 22, создавая тягу в ту или иную сторону, развернет аппарат. Движение подводного аппарата в вертикальной плоскости осуществляется отклонением в ту или иную сторону руля глубины 11 или включением электродвигателей 25 и 26, которые приводят в движение вертикальные гребные винты 27 и 28. Чтобы при горизонтальном или вертикальном перемещении подводного аппарата не нарушалась картина обтекания водным потоком наружного прочного корпуса и не разрушался пограничный слой, последний установлен внутри легкого корпуса 1 и связан с окружающей водой через отверстия 2 и 3, а также боковые вырезы 4.
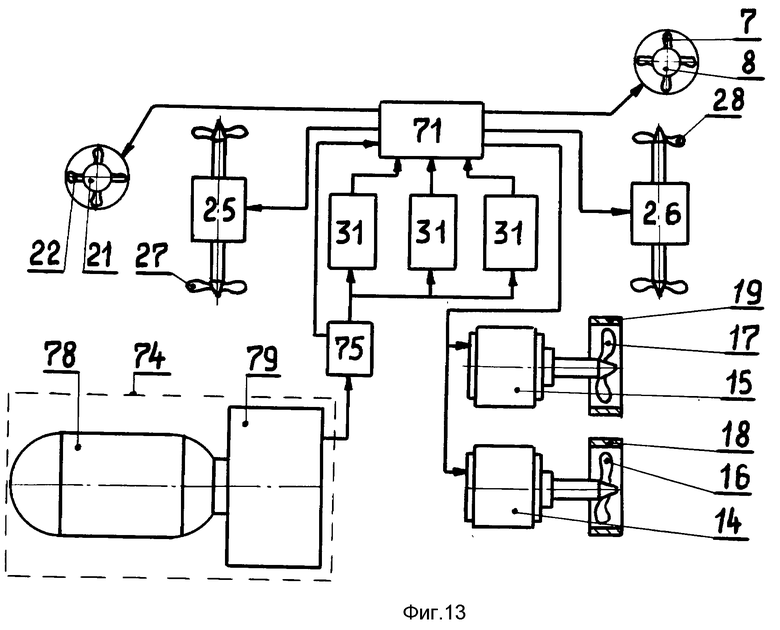
Все электродвигатели подводного аппарата питаются от аккумуляторных батарей 31, по мере разряда которых производится их подзарядка от пневмостатического двигателя-генератора 74. Для его включения необходимо открыть запорные краны на баллонах 92 и затем открыть расходный кран 91. Сжатый воздух высокого давления по трубопроводу 90 поступит внутрь корпуса 80 пневмостатического двигателя 78, давление которого контролируется манометром, не показанным на чертеже, и должно быть 100 - 150 атм. После заполнения корпуса пневмостатического двигателя сжатым воздухом до необходимого давления расходный кран 91 закрывается. Принцип действия пневмостатического двигателя такой же, что и у гидростатического двигателя, приводящего во вращение наружный прочный корпус, разница в использовании рабочего тела. Выталкивающая сила Архимеда, действующая как в жидкостях, так и в газах, производит давление на боковые стенки и дно каждого из каналов 96 и 97.
Как уже указывалось выше, силы, действующие на боковые стенки этих каналов, равны и уравновешивают друг друга потому, что площади их одинаковы (фиг. 6 и 7 ). А силы, действующие на дно каждого из каналов 96 и 97, ничем не уравновешены и приложены к телу ротора 93 по обе стороны от оси вращения (так же, как на фиг. 8). Эти силы и приводят ротор пневмостатического двигателя во вращение одновременно с постоянными магнитами 100 и 101, при этом силовые линии, указанных магнитов, двигаясь по ответвлениям магнитопровода 104, пересекают витки катушек 105, создавая в них однофазный переменный ток, который поступает на реле-регулятор 106, где поддерживаются постоянными его параметры, и дальше на выпрямитель 107. Часть выпрямленного тока с выхода выпрямителя снимается и подается на катушку возбуждения 85. Постоянный ток, протекая по катушке возбуждения, создает вокруг нее постоянное магнитное поле, которое усиливает магнитные поля постоянных магнитов 100 и 101, увеличивая тем самым ток и напряжение, снимаемые с выхода генератора электрического тока 79. Другая часть постоянного тока через реле обратного тока 75 подается на зарядку аккумуляторных батарей 31. Когда аккумуляторные батареи зарядятся, то реле обратного тока 75 отключает их от генератора, который в случае неисправности аккумуляторных батарей осуществляет питание электроприборов и тяговых электродвигателей (фиг. 13). Так как оба прочных корпуса не имеют иллюминаторов, то наблюдение за обстановкой вокруг подводного аппарата ведется с пульта 71, где также размещены все механизмы управления, посредством телевизионных мониторов 72, злектрически связанных с передней 35, задней 36, верхней 37 и нижней 38 телевизионными камерами. Пространство вокруг подводного аппарата освещается передним 40, задним 41, верхним 42 и нижним 43 прожекторами.
Работа манипулятора 34 контролируется телевизионной камерой 39, сигналы с которой поступают на телевизионный монитор, установленный на пульте 71. Освещение места при этом осуществляется прожектором 44. Поджимной сальник 57 и автоматический сальник 59 предохраняют наружный прочный корпус 50 от попадания внутрь его забортной воды. Плотность набивки первого регулируется поджимной гайкой 58. Кроме того, он должен быть выполнен из материала способного при попадании на него воды набухать и расширяться, сильнее прижимаясь к валу 61.
Автоматический сальник работает следующим образом. Сжатый воздух, величина давления которого зависит от давления воды за бортом, подается из баллона 70 в круглый канал 60. Под действием давления сжатого воздуха кольцо 59 прогибается, как показано на фиг. 11 пунктиром, и сильнее прижимается к валу 61 и боковым поверхностям диска 52. После достижения необходимой глубины и выполнения всех запланированных работ производится всплытие. Включением электродвигателей 14 и 15 гребные винты 16 и 17 обеспечивают движение подводного аппарата вперед. После чего руль глубины отклоняется вверх и выключается электромагнитный затвор балластного ящика 33. Дробь высыпается, нос подводного аппарата поднимается вверх и он начинает двигаться под углом к поверхности водоема. Для ускорения подъема включаются электродвигатели 25 и 26, которые приводят в движение вертикальные гребные винты 27 и 28, создающие дополнительную силу, направленную вверх.
По мере продвижения наверх давление забортной воды уменьшается и, если заслонка одного из каналов диска 52 была закрыта на глубине, то вода, находящаяся внутри канала, открывает выпускной клапан 56, выравнивая давление. Как только подводный аппарат поднимется на глубину 300 - 350 метров, сжатый воздух высокого давления из баллонов 32 подается в балластные цистерны 13, вытесняя из них воду и создавая необходимую плавучесть. После всплытия электродвигатели 25 и 26 отключаются и движение подводного аппарата происходит в водоизмещающем режиме за счет работы электродвигателей 14 и 15, а также гребных винтов 16 и 17. Управление подводным аппаратом в этом случае осуществляется путем отключения того или иного электродвигателя или обеспечения вращения их в противоположные стороны. Контроль за движением подводного аппарата при движении в водоизмещающем режиме ведется по телевизионным мониторам 72, информация на которые поступает от телевизионных камер 35, 36, 37, 38. Наружный прочный корпус 50 во время всплытия постепенно замедляет частоту вращения и, когда давление забортной воды станет недостаточным, останавливается и ставится на упор 66.
При работе пневмостатического двигателя частота вращения ротора может изменяться в небольших пределах путем увеличения или уменьшения давления сжатого воздуха внутри корпуса двигателя. При всплытии подводного аппарата необходимо убедиться, что расходный кран 91 закрыт и после этого необходимо нажать на выпускной клапан 87 и выпустить сжатый воздух из корпуса пневматического двигателя, остановив его. В процессе движения подводного аппарата внутри внутреннего прочного корпуса 62 поддерживается необходимый микроклимат посредством установки 68, которая обогащает воздух кислородом, удаляет углекислый газ, обогревает и поддерживает необходимую влажность. Кислород для дыхания поступает из баллонов 69. Все параметры контролируются приборами, установленными на корпусе установки.
Предлагаемый подводный аппарат может быть использован для погружения на большие глубины.
Положительный эффект предлагаемого изобретения: значительное уменьшение давления воды на прочный корпус, повышение автономности, более высокая безопасность для экипажа, не загрязняет окружающую среду.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ АППАРАТ В.С.ГРИГОРЧУКА | 1998 |
|
RU2131376C1 |
| ПОДВОДНЫЙ АППАРАТ | 2013 |
|
RU2515815C1 |
| ПОДВОДНЫЙ АППАРАТ С ЕДИНЫМ ДВИГАТЕЛЕМ ДЛЯ НАДВОДНОГО И ПОДВОДНОГО ХОДА | 2001 |
|
RU2197408C2 |
| МОТОРНОЕ СУДНО В.С.ГРИГОРЧУКА | 1998 |
|
RU2132797C1 |
| АВТОМОБИЛЬ В.С.ГРИГОРЧУКА | 1998 |
|
RU2147528C1 |
| ГЕНЕРАТОРНАЯ УСТАНОВКА | 2003 |
|
RU2247460C2 |
| ГЕНЕРАТОРНАЯ УСТАНОВКА | 1998 |
|
RU2148886C1 |
| ВОЗДУШНО-РЕАКТИВНЫЙ ПНЕВМОСТАТИЧЕСКИЙ ДВИГАТЕЛЬ | 2004 |
|
RU2259494C1 |
| МОТОРНОЕ СУДНО В.С.ГРИГОРЧУКА | 1996 |
|
RU2088476C1 |
| ТУРБОДИНАМИЧЕСКОЕ СУДНО В.С.ГРИГОРЧУКА | 1997 |
|
RU2128597C1 |
Изобретение относится к судостроению, в частности к подводным аппаратам. Подводный аппарат содержит легкий корпус, прочный корпус, аккумуляторные батареи, электродвигатели с горизонтальными и вертикальными гребными винтами, балластные и дифферентовочные цистерны. Прочный корпус состоит из двух частей: наружного прочного корпуса, выполненного в форме круглого цилиндра, имеющего в торцевой части входной люк с крышкой, и вставленного внутрь круглых опор на шарикоподшипниках внутреннего прочного корпуса, установленного также на шарикоподшипниках внутри наружного прочного корпуса и имеющего круглую цилиндрическую форму с входным люком и крышкой в торцевой части. Внутри последнего размещены пульт управления с телевизионной аппаратурой для наружного наблюдения, пневмостатический двигатель-генератор для подзарядки аккумуляторных батарей. Внутренний прочный корпус посредством соединительного вала прикреплен к раме, установленной внутри легкого корпуса, имеющего отверстия и вырезы для прохода воды. Наружный прочный корпус, имеющий отверстие для прохода соединительного вала, соединен с гидростатическим двигателем, выполненным в форме диска со специальными каналами, рабочим телом которого является забортная вода. Достигается повышение эксплуатационных качеств подводного аппарата. 3 з.п.ф-лы, 19 ил.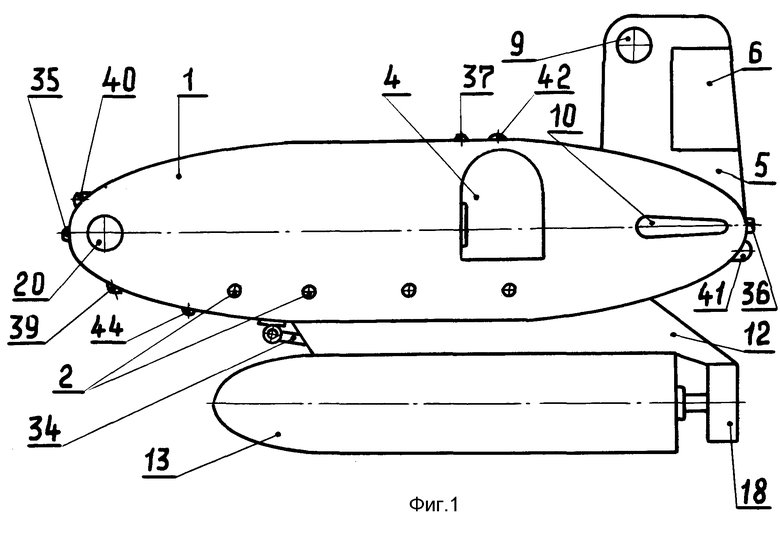
| Диомидов М.Н., Дмитриев А.Н | |||
| Покорение глубин | |||
| - Л.: Судостроение, 1974, с.174-176 | |||
| US 3521589 A, 25.07.70 | |||
| DE 3128268 A1, 03.02.83 | |||
| Управляемый по кабелю самоходный необитаемый подводный аппарат | 1991 |
|
SU1819794A1 |
