Изобретение относится к устройствам для перемещения рабочих органов из одного положения в другое, конкретно к диафрагменным приводам, обеспечивающим действие захватных органов грейферов или зажимных приспособлений станочных агрегатов.
Известны и широко применяются для приведения в действие органов указанного оборудования силовые приводы поршневого типа (см. например, описания к авт. свид. N 1013392 и 1323517 по кл. B 66 C 3/16, пат. N 2047011 по кл. F 15 B 15/00, или кн. М.М. Абакумов, Современные станочные приспособления. - М.: Машгиз, 1960, сс. 38 - 48). В состав таких приводов входят силовой цилиндр с крышками, поршень со штоком и уплотнения.
Недостатки поршневых приводов обусловлены наличием большого количества различных уплотнений и достаточно большой площадью трущихся поверхностей, что сокращает межремонтный период их эксплуатации (особенно в условиях повышенной загрязненности окружающей среды), снижает надежность работы и усложняет изготовление, кроме того, превалирование (как правило) размеров приводов по вертикали над его горизонтальными параметрами ухудшает равновесные характеристики всего агрегата, что отрицательно сказывается на производительности.
Из области машиностроения известны диафрагменные приводы, управляющие действиями зажимных приспособлений на станках (см. выше приведенную ссылку на ин. М. М. Абакумова, сс. 54 - 56). Такой привод состоит из герметичной камеры, одной или двух упругих диафрагм, разделяющих камеру на изолированные друг от друга рабочие полости, упорных шайб, штока (приводящего в действие зажимные элементы), уплотнений и двух штуцеров для подвода сжатого воздуха в полости камеры.
По сравнению с поршневыми приводами диафрагменные приводы обладают более высокой герметичностью и надежностью, проще в изготовлении, компактны.
К недостаткам этого класса силовых устройств следует отнести ограниченность рабочего хода и выбора величины силового воздействия на объект, что в свою очередь ограничивает сферу их применения.
В качестве прототипа заявляемого решения принято силовое устройство, представленное на фиг. 51, с. 61 указанного источника (М.М. Абакумов. Современные станочные приспособления).
Известный привод перемещения зажимных приспособлений включает в себя цилиндрический корпус с верхней и нижней крышками, две эластичные диафрагмы, установленные в корпусе с образованием верхней и нижней герметичных камер, сообщенных с системой подачи рабочего агента, упорный элемент (в виде двух плавающих в междиафрагменной полости конусов), а также рычажный усилитель.
Прототипу присущи те же общие для всего класса диафрагменных устройств недостатки, ограничивающие сферу его применения оборудованием, не требующим больших усилий и перемещений для приведения в действие его рабочих органов. При необходимости (но тоже в ограниченных пределах) силу и рабочий ход привода такой конструкции увеличивают путем использования рычажных усилителей, увеличения количества диафрагменных камер, т.е. за счет усложнения конструкции.
Цель изобретения - расширение силового диапазона привода, его эксплуатационных возможностей и сферы применения.
Для достижения поставленной цели в известный привод перемещения, содержащий цилиндрический корпус с верхней и нижней крышками, две эластичные диафрагмы, установленные в корпусе с образованием герметичной полости с верхней и нижней рабочими камерами, сообщенными через штуцера в крышках с системой подачи рабочего агента, и упорным элементом, расположенным между диафрагмами, внесены следующие изменения.
В корпусе размещены два горизонтальных вала с цапфами в средней части, симметрично разнесенные относительно плоскости симметрии корпуса, концы которых пропущены через корпус и предназначены для сочленения с зажимными или захватными органами.
Упорный элемент выполнен в виде диска.
Введен синхронизирующий узел в виде пары рычагов, встречно ориентированных в плоскости симметрии диска, параллельной выходным валам, и закрепленных одними концами на корпусе посредством шарниров, оси которых лежат в плоскости размещения упомянутых валов.
При этом свободные концы рычагов и цапф установлены в выполненных в теле упорного диска линейных направляющих с возможностью возвратно-поступательного перемещения и поворота в вертикальной плоскости.
Комбинация перечисленных признаков, составляющая отличия заявляемого решения и обеспечивающая в совокупности с заимствованными признаками достижение поставленной цели, в доступной заявителю научно-технической и патентной информации не обнаружена.
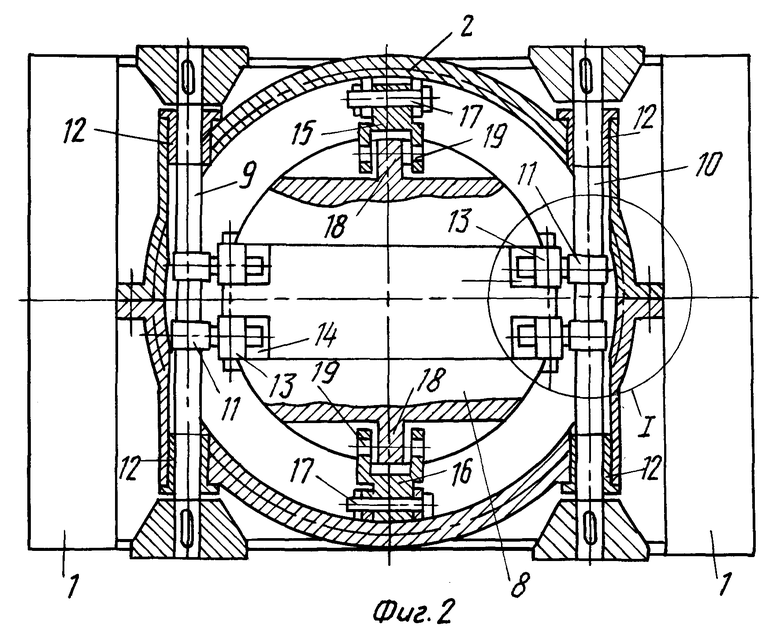
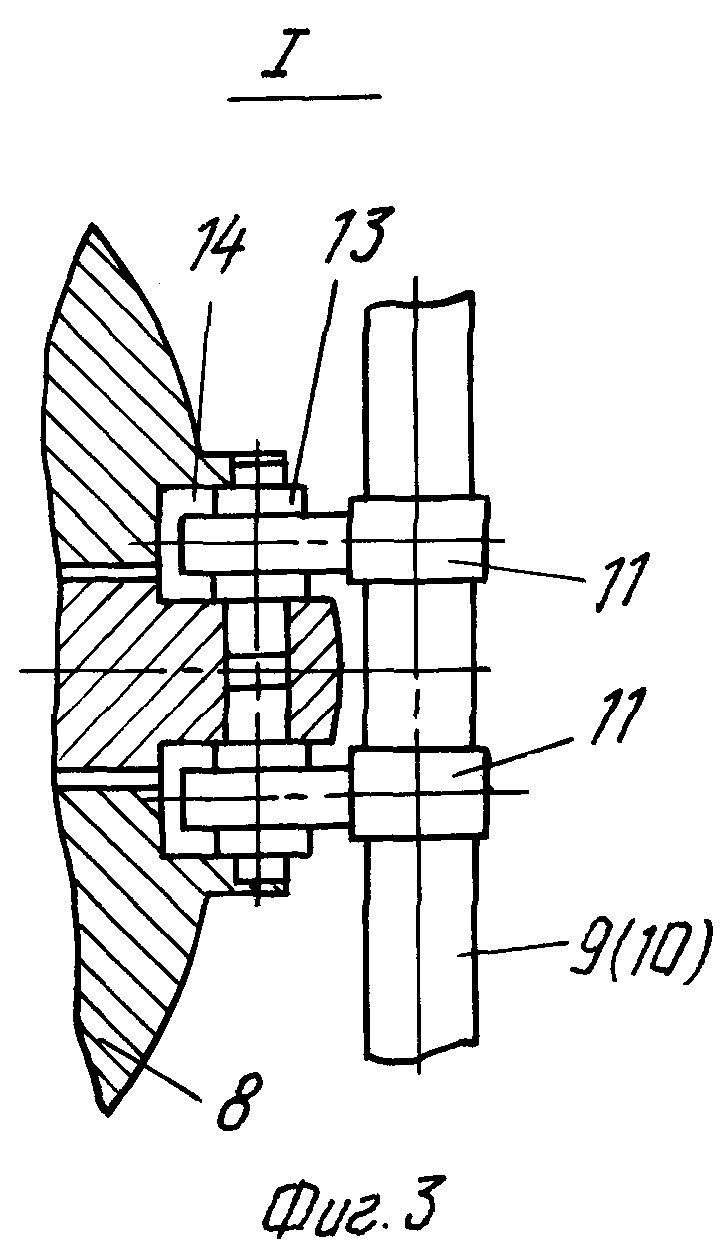
На фиг. 1 показан привод перемещения, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел I на фиг. 2.
На чертежах в качестве объекта перемещения показаны захватные челюсти 1 грейфера. В случае применения привода для перемещения зажимных приспособлений, изменения коснутся только элементов сопряжения, что находится за пределами существа предложения.
Привод содержит цилиндрический разъемный корпус 2 с верхней 3 и нижней 4 крышками (стяжные элементы не показаны), две тарельчатые упругие диафрагмы 5, 6, устанавливаемые в корпусе с образованием герметичной полости с верхней (между диафрагмой 5 и крышкой 3) и нижней (между элементами 6 и 4) рабочими камерами 7, сообщающимися через штуцера в крышках с системой подачи воздуха (штуцера и система не показаны). Между диафрагмами 5, 6 расположен упорный диск 8.
На чертежах элементы привода находятся в исходном,- отключенном от системы подачи воздуха, состоянии, при котором челюсти 1 закрыты под действием собственного веса, а диафрагмы 5, 6 практически находятся в контакте с крышками 3, 4 корпуса и таким образом рабочие камеры 7 в объеме герметичной полости не выделены.
На фиг. 1 пунктиром показано положение диафрагмы 6 при смыкании челюстей 1 посредством привода и полость 7 нижней рабочей камеры.
С упорным диском 8 связаны выходные валы 9, 10, несущие челюсти 1. В средней части валы имеют цапфы 11, использован спаренный (по две цапфы на каждый вал) вариант.
Концы валов выходят за пределы корпуса 2 через выполненные в нем проходные отверстия с уплотнительными втулками 12. Элементы сопряжения челюстей 1 с концами выходных валов 9, 10 привода на чертежах не показаны.
Концы цапф свободно пропущены через обоймы 13, шарнирно закрепленные в направляющих пазах 14 диска 8 (фиг. 3).
Синхронизирующий узел привода образован парой рычагов 15 - 16 и предназначен для обеспечения горизонтального положения диска 8 при передаче силового воздействия через цапфы 11 на валы 9, 10 и синхронный поворот последних и соответственно связанных с ними челюстей 1. Для этого одними концами рычаги 15, 16 закреплены на корпусе 2 в плоскости размещения валов 9, 10 с помощью шарниров 17, а другими концами, имеющими "вилкообразную" форму, - на направляющих выступах 18 диска 8 посредством сухарей 19.
Верхняя крышка 3 привода снабжена подвеской 20 для навешивания на крюк крана и транспортировки грейфера.
Привод работает следующим образом.
Для раскрытия челюстей 1 подают воздух через штуцер верхней крышки 3. Под действием заполняющего верхнюю камеру 7 воздуха диафрагма 5 отжимает диск 8 вниз. Рычаги 15, 16, поворачиваясь в шарнирах 17, удерживают диск от перекосов. Диск взаимодействует посредством цапф 11 с валами 9, 10. В результате валы поворачиваются на требуемый для раскрытия челюстей 1 угол и в таком состоянии грейфер вводится в контакт с перегружаемым материалом (например, при очистке желобов в доменном производстве) или лесоматериалом. Переключают подачу воздуха на штуцер нижней крышки 4. Диафрагма 6, прогибаясь под действием воздуха, давит на диск 8, перемещая его в верхнее положение.
Синхронизирующие рычаги 15, 16 обеспечивают горизонтальное положение диска 8 при его перемещении.
Диск увлекает за собой цапфы 11, под воздействием которых валы 9, 10, поворачиваясь, смыкают челюсти 1, захватывая материал.
Наполненная воздухом нижняя камера 7 обеспечивает надежный захват. В таком положении грейфер транспортируется к месту разгрузки, где аналогично описанному выше происходит раскрытие челюстей. Далее процесс повторяется.
В нерабочем состоянии привода челюсти 1 закрываются без принудительного поворота валов с помощью воздуха, а под действием их веса.
Таким образом, предлагаемая конструкция обеспечивает при использовании привода получение следующих положительных результатов:
- мягкое, без рывков и перекосов, перемещение рабочих органов различных устройств;
- стабильность силового воздействия в режиме полного контакта рабочего органа с объектом;
- удобство сопряжения с различными формами рабочих органов;
- выбор усилия захвата (зажима) в широком диапазоне значений без каких-либо усложнений конструкции.
Кроме того, высокие прочностные и изолирующие свойства корпуса, низкий центр тяжести привода позволяют успешно использовать его в достаточно специфических условиях работы, например, под водой, с повышенной загрязненностью окружающей среды, при проходке шурфов и стволов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНЕРГОУСТАНОВКА | 1993 |
|
RU2075635C1 |
| КИНЕТИЧЕСКИЙ АККУМУЛЯТОР | 1996 |
|
RU2118876C1 |
| УСТРОЙСТВО ДЛЯ КЛЕЙМЕНИЯ ПРОКАТА | 1993 |
|
RU2086325C1 |
| СПОСОБ ОБРАБОТКИ ДЛИННОМЕРНЫХ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ | 1992 |
|
RU2096140C1 |
| СЧЕТЧИК ДОЗ ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕКАЧИВАЕМОЙ СРЕДЫ ПРИ УЧЕТЕ СЖИГАЕМОГО ТОПЛИВА И БЫТОВЫХ НУЖД ВОДЫ ИЛИ ГАЗА | 1993 |
|
RU2081399C1 |
| КОНЦЕВОЙ ЗАТВОР КАМЕР ЗАПУСКА И ПРИЕМА ПОТОЧНЫХ СРЕДСТВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2009 |
|
RU2394657C1 |
| СЧЕТЧИК ГАЗА И ЖИДКОСТИ | 1996 |
|
RU2126144C1 |
| ВЫРАВНИВАТЕЛЬ НАГРУЗКИ | 1997 |
|
RU2119708C1 |
| ПЕСКОМЕТНОЕ УСТРОЙСТВО | 1993 |
|
RU2042470C1 |
| СЧЕТЧИК ГАЗА | 1999 |
|
RU2182316C2 |
Изобретение относится к устройствам для перемещения рабочих органов из одного положения в другое, обеспечивающим действие захватов органов грейферов или зажимных приспособлений станочных агрегатов. Привод перемещения содержит цилиндрический корпус с верхней и нижней крышками, две эластичные диафрагмы. Диафрагмы установлены в корпусе с образованием герметичной полости с верхней и нижней рабочими камерами. Камеры сообщены через штуцера в крышках с системой подачи рабочего агента и упорным элементом, расположенным между диафрагмами. В корпусе размещены два горизонтальных вала с цапфами в средней части. Валы симметрично разнесены относительно плоскости симметрии корпуса. Концы валов пропущены через корпус и предназначены для сочленения с зажимами или захватными органами. Упорный элемент выполнен в виде диска. Введен синхронизирующий узел в виде пары рычагов. Рычаги встречно ориентированы в плоскости симметрии диска, параллельной выходным валам. Также рычаги закреплены одними концами на корпусе посредством шарниров. Оси шарниров лежат в плоскости размещения упомянутых валов. Свободные концы рычагов и цапф установлены в выполненных в теле упорного диска линейных направляющих с возможностью возвратно-поступательного перемещения и поворота в вертикальной плоскости. Устройство расширяет диапазон силового воздействия. 3 ил.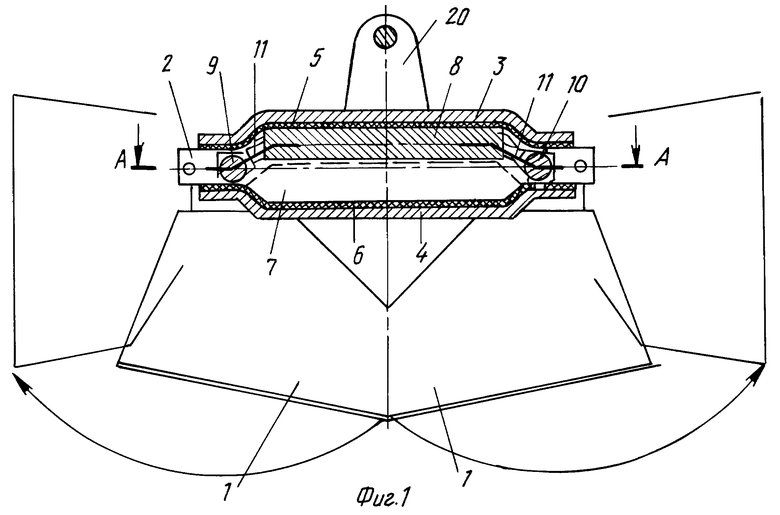
Привод перемешения, содержащий цилиндрический корпус с верхней и нижней крышками, две эластичные диафрагмы, установленные в корпусе с образованием герметичной полости с верхней и нижней рабочими камерами, сообщенными через штуцера в крышках с системой подачи рабочего агента, и упорным элементом, расположенным между диафрагмами, отличающийся тем, что в корпусе размещены два горизонтальных вала с цапфами в средней части, симметрично разнесенные относительно плоскости симметрии корпуса, концы которых пропущены через корпус и предназначены для сочленения с зажимными или захватными органами, а упорный элемент выполнен в виде диска, введен синхронизирующий узел в виде пары рычагов, встречно ориентированных в плоскости симметрии диска, параллельной выходным валам, и закрепленных одними концами на корпусе посредством шарниров, оси которых лежат в плоскости размещения упомянутых валов, при этом свободные концы рычагов и цапф установлены в выполненных в теле упорного диска линейных направляющих с возможностью возвратно-поступательного перемещения и поворота в вертикальной плоскости.
| Абакумов М.М | |||
| Современные станочные приспособления | |||
| - М,: Машгиз, 1960, с.61, фиг.51 | |||
| ГИДРОПНЕВМОЦИЛИНДР | 1992 |
|
RU2047011C1 |
| Привод захватных органов | 1985 |
|
SU1323517A1 |
| Гидравлический грейфер | 1981 |
|
SU1013392A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ | 1990 |
|
RU2016271C1 |
| US 4005894, 01.02.77. | |||
