Изобретение относится к космической технике, а более конкретно к зондам-пенетраторам для изучения физико-химических свойств грунта и доставки его на Землю.
С момента осуществления первых систематических научных исследований небесных тел, планет, например лунной поверхности, и по настоящее время в качестве одного из основных средств для получения проб грунта остается буровой снаряд /1/.
Так, космический аппарат /КА/ "ЛУНА - 16" имел в своем составе грунтозаборное устройство (буровой снаряд внешним диаметром 26 мм, внутренним диаметром 20 мм, длиной 370 мм и ходом бурового инструмента 320 мм), обеспечивающее бурение и забор 105 г грунта в возвращаемый аппарат. КА "ЛУНА - 20", по конструкции аналогичный "Луне 16", с помощью такого же бурового устройства доставил на Землю грунт массой 55 г. "ЛУНА - 24" - третий КА, совершивший рейс Земля-Луна-Земля, с помощью бурового грунтозаборного устройства (буровой снаряд внешним диаметром 15 мм, внутренним диаметром 8 мм, длиной 3157 мм и ходом 2575 мм) произвел бурение лунного грунта уже на глубину порядка 2 м и доставил на Землю 170.1 г грунта. С помощью лунохода, доставленного на Луну КА "АППОЛОН 15", было пройдено в общей сложности 27.2 км лунной поверхности и пробурено несколько скважин глубиной до 2.7 м для получения колонок грунта и для установления приборов, измеряющих тепловые потоки из недр Луны. "АППОЛОН 16" осуществил бурение скважин глубиной уже до 3 м. Впоследствии с помощью КА "АППОЛОН 17" были пробурены скважины глубиной также до 3 м.
Несмотря на достаточно большое количество проведенных работ по изучению физико-химических свойств лунного грунта степень их информативности все еще остается недостаточной, что требует проведения еще большего объема исследований.
Однако в связи с отсутствием необходимого финансирования проведение подобных исследований в ближайшем будущем представляется проблематичным. Кроме того, сам принцип получения проб грунта с помощью буровых снарядов представляется недостаточно рациональным, поскольку результативность процесса получения необходимого количества проб всецело зависит от успешной работы спускаемого аппарата, что существенно снижает надежность данного способа грунтозабора. Примером может служить полет КА "ЛУНА - 23", осуществившего посадку на участке лунной поверхности с неблагоприятным рельефом, вследствие чего было повреждено буровое устройство, предназначавшееся для взятия образцов лунного грунта.
Следует также отметить, что использование буровых устройств не решает более общей задачи зондирования лунной поверхности, что требует привлечения для этой цели дополнительных аппаратных средств. Все это снижает общую надежность проведения научных исследований и требует больших финансовых затрат.
В связи с этим более рациональным представляется использование для исследования лунной поверхности зондов-пенетраторов, сбрасываемых на изучаемую поверхность с орбитальных КА (например, КА "ФОБОС", "МАРС - 96" /2/). При этой технологии перед отделением от КА осуществляется закрутка каждого зонда-пенетратора относительно его продольной оси. После отделения от КА включаются твердотопливные двигательные установки, которые обеспечивают сход пенетратора с орбиты КА и его торможение до скорости, потребной для углубления пенетратора на заданную глубину и обеспечения перегрузки, допустимой для осуществления нормальной работы размещенных в пенетраторе приборов.
В частности, в КА "МАРС - 96" после удара о поверхность планеты со скоростью 50 - 100 м/с в пенетраторе происходит разделение его корпуса на две части : внедряемой, проникающей на глубину до 4 - 6 м и хвостовой, остающейся в поверхностном слое грунта, из которой выдвигается передающая антенна с телекамерой и датчиками научной аппаратуры.
В отличие от буровых снарядов пенетраторы менее зависимы от работы КА, но не решают задачу забора проб грунта и передачу их на Землю.
Поэтому целью настоящего изобретения является устранение указанных выше недостатков и создание технического решения, обеспечивающего высокую надежность проведения научных исследований лунной поверхности, повышенную информативность получаемых результатов и сравнительно малые финансовые затраты. При этом в качестве прототипа предложенного технического решения приняты способ и реализующее его устройство, описанные в /2/.
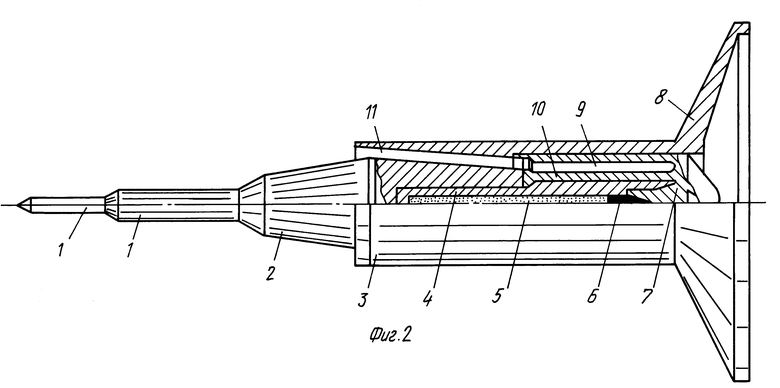
Сущность предложенного способа зондирования и забора лунного грунта поясняется фиг. 1. Подлетающий по рабочей встречной траектории к Луне со второй космической скоростью КА отделяет от себя зонд-пенетратор (или несколько зондов), предварительно переведя его на траекторию снижения и закрутив относительно его продольной оси до угловой скорости, необходимой для обеспечения устойчивого полета. Стабилизированный вращением пенетратор, снабженный необходимой научной аппаратурой и грунтозаборником, со скоростью порядка 2500 м/с подлетает к лунной поверхности и внедряется в нее на глубину 10 - 15 м. В процессе внедрения пенетратора в грунт в последнем формируется каверна, поперечные размеры которой не выходят за пределы наибольшего поперечного сечения корпуса пенетратора, чем обеспечивается его устойчивое движение в грунте и захват с внешней поверхности каверны частиц грунта внутрь корпуса пенетратора. Захваченную часть грунта в корпусе пенетратора переводят в транспортное состояние, необходимое для отправки на Землю. По мере движения пенетратора в грунте в его корпусе осуществляют накопление потенциальной энергии, необходимой для сообщения находящемуся в транспортном состоянии грунту скорости, достаточной для преодоления действия гравитационных сил небесного тела и возвращения на Землю.
Реализация описанного способа забора лунного грунта осуществляется с помощью устройства, представленного на фиг. 2.
Согласно фиг. 2 устройство содержит следующие основные конструктивные элементы: навигатор - 1; корпус блока научной аппаратуры - 2; корпус грунтозаборника 3; корпус метательного устройства - 4; метательное рабочее тело - 5; поршень - 6; корпус возвращаемого аппарата - 7; тормозная плита - 8; загружаемый объем грунтозаборника - 9; затвор грунтозаборника - 10; захват грунтозаборника - 11.
Предложенное устройство работает следующим образом.
Внедряясь со скоростью 2500 м/с в грунт, передняя часть пенетратора - кавитатор - испытывает в соответствие с механизмом, описанным в /3/, нагрузки, приводящие к пластическим деформациям корпуса кавитатора и его частичному "срабатыванию" в процессе движения в грунте. "Срабатывание" кавитатора обеспечивает унос части массы материала кавитатора и тем самым сохранение температуры корпуса пенетратора на необходимом для работы аппаратуры уровне, а также решает проблему уменьшения действующих на пенетратор перегрузок для приемлемых значений.
Образующаяся при движении пенетратора в грунте каверна, поперечные размеры которой согласно /4/ не превышают внешний диаметр пенетратора, равный (6-8) d, где d - диаметр кавитатора, своим поверхностным слоем попадает в захват 11 корпуса 3 грунтозаборника, а затем в загружаемый объем 9 грунтозаборника. В процессе торможения пенетратора под действием сил инерции поршень 6 перемещается внутри корпуса метательного устройства 4, сжимая при этом метательное рабочее тело 5. В результате взаимодействия тормозной плиты 8 с поверхностным слоем грунта хвостовой отсек пенетратора останавливается, а блок научной аппаратуры 2 продолжает еще двигаться в грунте до полного израсходования запасенной в процессе полета кинетической энергии. Запасенная же в процессе сжатия метательного рабочего тела 5 энергия затем переходит в кинетическую энергию движения поршня 6, двигающегося в этот период времени в обратном направлении. Достигнув своего исходного положения, поршень 6 передает часть своей кинетической энергии корпусу возвращаемого аппарата 7, который приходит в движение и выстреливается в обратном движению пенетратора направлении. При этом срабатывает затвор 10 грунтозаборника, наглухо перекрывая его загружаемый объем 9.
Таким образом, в результате взаимодействия пенетратора с грунтом блок научной аппаратуры 2 остается заглубленным на глубине 10 - 15 м, хвостовая часть пенетратора, связанная с блоком 2 проводной связью, опирается о поверхность грунта, а возвращаемый аппарат 7 со второй космической скоростью удаляется от лунной поверхности.
Ниже приведена оценка основных технических характеристик метательного устройства, способного сообщить потребную скорость движения грунтозаборному устройству.
Согласно /5/ начальная (дульная) скорость метаемого тела определяется зависимостью:
V0 = amax • f(l,N,Cq),
где amax - местная скорость звука в метаемом рабочем теле при максимальном давлении;
l - длина метательного устройства в калибрах;
N=Wct/Wmin -степень расширения рабочего тела;
Wct - внутренний объем метательного устройства;
Wmin -минимальный объем метательного устройства при полном сжатии рабочего тела поршнем;
Cq=q/d3 - относительная масса метаемого тела;
q - масса метаемого тела;
d - калибр ствола метательного устройства.
Выражение для скорости звука amax приводится к виду:amax=a0 Tmax/T0,
где a0 - скорость звука в рабочем теле в исходном состоянии (до сжатия);
Tmax, T0 - максимальная и исходная температура рабочего тела.
Масса рабочего тела определяется формулой:
w=WminpPmax/Rtmax
В соответствие с /5/ существует оптимальное значение начального давления, при котором процесс метания происходит с наименьшими потерями:
(P0)oпт=wRT0/((x-1) b1W1),
где R - газовая постоянная (для водорода R=424 м/град; для гелия R=212 м/град);
x - коэффициент адиабаты рабочего тела;
b1 = 0.25 - 0.27.
Учитывая, что P0W0/(qRT0)=w/q=П,
можно заключить, что существует оптимальное отношение w/q=Попт, зависящее только от x, b1 - Попт=1/((x+1)b1).
Наличие оптимального значения П дает четкую базу для выбора оптимальной метательной системы. Воспользовавшись понятием оптимального значения Попт выражение (2) можно представить в виде:
tmax/Pmax = πl/(4NRCqПопт)
Тогда исходное выражение (1) запишется в виде:
Vc/a0=( π /(4NRT0))1/2 (1Pmax/(ПоптC2))1/2f(l, N, Cq) (3)
Например, при N = 3, R = 212 м/град; T0= 300K выражение (3) принимает вид:
Vc/a0 = 2.04 • 10-3(lPmax/(ПоптCq))1/2 • f(l, N, Cq)
Величина максимального давления находится из уравнения движения поршня относительно ствола метательного устройства, решение которого может быть представлено в виде:
Pmax = 2qnn(1+z),
где qn=qn/S - удельная нагрузка на поршень;
n=Vc 2/gh* - перегрузка, формируемая при внедрении пенетратора в грунт;
z=qk/qn - коэффициент конструктивного совершенства метательной системы;
S - площадь поперечного сечения поршня;
Vc - скорость внедрения пенетратора в грунт;
h* - глубина проникания пенетратора в грунт;
g - ускорение свободного падения.
В результате совместного решения задачи проникания пенетратора в грунт и внутрибаллистической задачи движения поршня по стволу были определены ожидаемые проектные параметры метательной системы, основные из которых приведены ниже
Относительная масса метаемого тела, C2 2-3 кг/дм3;
Отношение массы метаемого тела к массе метательного рабочего тела, q/w 1/6 - 1/8;
Удлинение метательной установки, rств/d 25 - 30;
Отношение массы метаемого тела к массе ствола метательной установки, q/qств 0.25 - 0.3;
Максимальное давление в канале ствола метательной установки, Pm 3300 - 3500 кг/cм3;
Относительная скорость метаемого тела, V0/a0 2.0 - 2.2.
При использовании метательного рабочего тела, например, диаметром 100 мм и при указанных выше основных параметрах могут быть получены следующие массовые характеристики основных функциональных элементов пенетратора:
Масса метаемого тела 1 кг
Масса метательной установки 4.5 кг
Масса метательного вещества 7 кг
Масса кавитатора 2.5 кг
Масса корпуса пенетратора 5 кг
Масса научной аппаратуры 2.5 кг
Итого: 22.5 кг
Приведенные основные проектные параметры метательного устройства и массовые характеристики пенетратора указывают на возможность практической реализации данного технического предложения. При этом основными признаками, отличающими данное техническое предложение от ранее известных в части способа, являются: кинетическая энергия подлетаемого к исследуемой поверхности и внедряемого в нее аппарата преобразуется в потенциальную энергию находящегося в аппарате рабочего тела (газа или жидкости), причем одновременно с процессом внедрения осуществляется захват образцов грунта в аппарат, а в момент максимального сжатия рабочего тела организуется разгон захваченных образцов грунта в направлении, противоположном движению аппарата и совпадающем с вектором второй космической скорости на траектории возвращения.
Что касается заявленного устройства, то здесь основными отличиями являются: хвостовая часть корпуса пенетратора, снабженная возвращаемым аппаратом с заборным устройством и метательным устройством в виде полузамкнутой трубы с размещенным в ней рабочим телом (газом или жидкостью) и поршнем, перекрывающим своим корпусом выходной канал трубы, обращенный к хвостовой части пенетратора, и кинематически связанным с возвращаемым аппаратом и захватывающим устройством, выполненным в корпусе пенетратора в виде кольцевого канала, расположенного с внешней стороны корпуса пенетратора и заканчивающегося в хвостовой части пенетратора кольцевым карманом, перекрывающимся отжимным запирающим элементом, являющимся частью корпуса возвращаемого аппарата, причем возвращающий аппарат размещен соосно с корпусом пенетратора и метательным устройством.
Источники информации, используемые при написании данного технического предложения:
1. Космонавтика : энциклопедия /Гл. ред. В.П.Глушко; Редколлегия : В.П. Бармин. К.Д.Бушуев, В.С.Верещагин и др. - М: Сов.энциклопедия, 1985 г. - с. 221-223.
2. С.П.Уманский - Автоматы исследуют Марс. -"Вестник воздушного флота", N 4 1995 г., с. 58-61.
3. Г. Мелош. Образование ударных кратеров: геологический процесс. Пер с англ. - М: Мир. 1994, с. 70 - 89.
4. В.А.Велданов, А.Н.Наумов. - Особенности движения пенетратора с газовым демпфером полезной нагрузки. - "Оборонная техника", N 1, 1995 г., с. 37 - 39.
5. Баллистические установки и их применение в экспериментальных исследованиях. Под ред. Н.А.Златина и Г.И.Мишина. - М: Наука, 1974 г., с. 142-149.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОГО ГРУЗА В ГРУНТ НЕБЕСНОГО ТЕЛА, ОБЕСПЕЧЕНИЯ ИССЛЕДОВАНИЙ ГРУНТА И НЕБЕСНОГО ТЕЛА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2626792C1 |
| УСТРОЙСТВО ДЛЯ ДОБЫЧИ ВОДЫ НА ЛУНЕ | 2021 |
|
RU2770385C1 |
| Способ добычи полезных ископаемых на астрономическом объекте | 2021 |
|
RU2770502C1 |
| КОСМИЧЕСКИЙ ПОСАДОЧНЫЙ АППАРАТ | 2014 |
|
RU2584552C1 |
| Система амортизации нагрузок на космический аппарат при посадке на безатмосферные объекты | 2019 |
|
RU2725103C1 |
| СПОСОБ СНЯТИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ В ГЕОЛОГИЧЕСКОЙ СРЕДЕ | 1992 |
|
RU2050014C1 |
| Система амортизации нагрузок на космический аппарат при посадке на безатмосферные объекты | 2019 |
|
RU2725098C1 |
| Устройство для измерения теплофизических характеристик грунта | 2019 |
|
RU2714528C2 |
| СПОСОБ УДАРНОГО ВОЗДЕЙСТВИЯ НА ОПАСНЫЕ КОСМИЧЕСКИЕ ОБЪЕКТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2504503C2 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПОЛЕЗНОГО ГРУЗА В МАССИВ ГРУНТА НЕБЕСНОГО ТЕЛА (ВАРИАНТЫ) | 2007 |
|
RU2349514C1 |
Изобретение относится к космической технике, а более конкретно к зондам-пенетраторам для изучения физико-химических свойств грунта небесных тел и доставки его на Землю. Согласно изобретению доставку аппарата (пенетратора) с грунтозаборником к поверхности планеты осуществляют без торможения. В процессе внедрения в планету захватывают образцы грунта внутрь возвращаемой части пенетратора. При этом преобразуют кинетическую энергию движения аппарата в потенциальную энергию путем сжатия рабочего тела (газа или жидкости) на борту пенетратора. Накопленная потенциальная энергия через метательное устройство передается указанной возвращаемой части в направлении, обратном направлению внедрения. В результате этого данная часть с грунтом приобретает вторую космическую скорость на траектории возвращения к Земле. Изобретение обеспечивает высокую надежность исследований, преимущественно лунной поверхности, их повышенную информативность и сравнительно малые финансовые затраты. 2 с.п.ф-лы, 2 ил.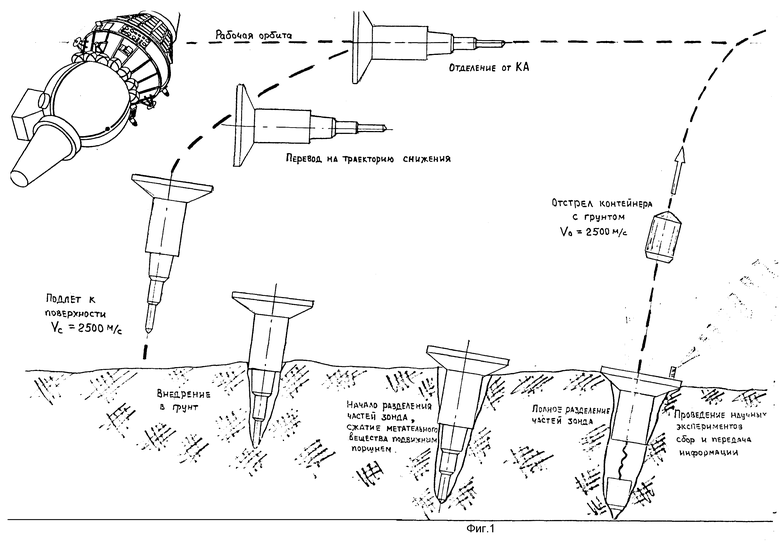
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Уманский С.П | |||
| Автоматы исследуют Марс | |||
| - Вестник воздушного флота, N 4, 1995, с.58 - 61 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Космонавтика | |||
| Энциклопедия | |||
| / Гл.ред | |||
| В.П.Глушко | |||
| - М.: Советская энциклопедия, 1985, с.221 - 223 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Мелош Г | |||
| Образоване ударных кратеров: геологический процесс | |||
| - М.: Мир, 1994, с.70 - 89 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Велданов В.А., Наумов А.Н | |||
| Особенности движения пенетратора с газовым демпфером полезной нагрузки | |||
| - Оборонная техника, N 1, 1995, с.37 - 39. | |||
