Изобретение относится к машиностроению и предназначено для решения указанной задачи более простым средством и с большей точностью, чем применяемые. В качестве такого средства предлагается система /пакет/ из трех клиньев: двух поворотных и неподвижного. Использовано свойство кинематической пары звеньев с непараллельными опорными плоскостями /пары клиньев/ изменять свой угол скоса при относительном повороте по гармоническому закону /Аналитическая геометрия, угол между направлениями/:
(для пары одинаковых клиньев с углом α).
ϕ - угол относительного поворота клиньев,
γ - угол между плоскостями пары клиньев α,α.
cosθ = cosγcosβ+sinγsinβcosψ (2)
(для пары разных клиньев с углами γ и β).
ψ - угол относительного поворота клиньев
θ - угол между плоскостями пары клиньев γ,β.
Передаточные отношения двух пар клиньев:

1. Уровень техники
Аналогом заявленного способа является "Способ установки углов с высокой точностью посредством двух и более скошенных дисков" /PCT WO 82/00218 21.01.82/.
Гарантирована точность в одну угловую секунду, но схема осуществления слишком сложна и не реализована до сих пор.
Предлагаемый способ осуществляется более простым средством /с двумя поворотными клиньями/ и с большей точностью.
Прототипом предлагаемого устройства служит измерительный прибор RANDY ANDERTON /US 4872267 A 10.10.89 G 01 B 15/24/, представляющий собой систему из трех пар скользящих планок, образующих подвижный треугольник. Он конструктивно сложнее, чем заявленное устройство, менее точен и неудобен для использования в промышленном производстве.
2. Сущность изобретения
Способ точной установки углов между плоскостями с жесткой фиксацией осуществляется посредством системы из трех клиньев, один из которых выполняют неподвижным, а два других - поворотными, причем указанные клинья образуют двухступенчатый преобразователь углов с дискретной передачей. С помощью первой ступени преобразователя изменяют угол между плоскостями в диапазоне от 0 до 45o, а посредством второй ступени осуществляют точную коррекцию угла между плоскостями, при этом ошибка не может превышать половину угловой секунды и равна максимальной величине одного шага поворота, пары клиньев второй ступени преобразователя углов. По разработанной методике отсчитывают числа шагов поворота клиньев.
Устройство для точной установки углов между плоскостями с жесткой фиксацией включает в себя систему из трех клиньев с возможностью отсчета чисел поворота клиньев, при этом один из клиньев выполнен неподвижным, а два других - поворотными, образуя двухступенчатый преобразователь углов с дискретной передачей. Первая ступень указанного преобразователя выполнена с возможностью изменения угла между плоскостями в диапазоне от 0 до 45o, а вторая ступень выполнена с возможностью осуществления точной коррекции угла между плоскостями.
При этом ошибка не может быть больше половины угловой секунды и равна максимальной величине шага поворота клиньев второй ступени преобразователя углов.
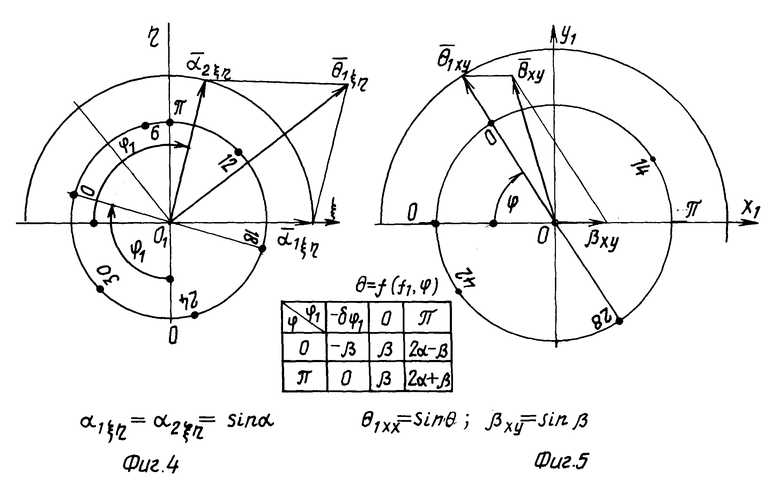
На фиг. 1 представлена конструкция устройства; на фиг. 2 - 5 кинематическая схема установки углов.
3. Конструкция устройства и оценка его точности
Предлагаемое устройство /фиг. 1/ состоит из трех клиньев: двух поворотных с углом  и неподвижного β = 10-3, образующих две ступени преобразователя углов: первая ступень /пара клиньев 1,2/ изменяет угол между плоскостями в диапазоне от 0 до 45o, а вторая ступень /зафиксированная первая пара и неподвижный клин 3/ осуществляет точную коррекцию угла между плоскостями /основания и клина 2/.
и неподвижного β = 10-3, образующих две ступени преобразователя углов: первая ступень /пара клиньев 1,2/ изменяет угол между плоскостями в диапазоне от 0 до 45o, а вторая ступень /зафиксированная первая пара и неподвижный клин 3/ осуществляет точную коррекцию угла между плоскостями /основания и клина 2/.
Для дискретного поворота звеньев во фланцах клиньев 1 и 2 просверлены отверстия: n1=35 /снизу/ и n1+1=36/сверху/, а в клиньях 3 и 1 с той же целью просверлено n2= 55 отверстий снизу и n2+1=56 - сверху. Отверстия в клине 2 пронумерованы против хода часовой стрелки от 0 до 35, а в клине 1 - по часовой стрелке от 0 до 55.
Таким образом получен двухступенчатый преобразователь углов с дискретным поворотом звеньев и жесткой их фиксацией /штифтами по совпадающим отверстиям/.
Для возможности отсчета чисел шагов нанесены начальные и конечные риски на ободках: клина 3 /в плоскости симметрии/ и клина 1/ в плоскости, перпендикулярной плоскости симметрии/.
Общее число фиксируемых шагов:
I ст.
n1(n1+1)=630,
II ст.
n2(n2+1)=1540.
Размер одного шага
Приращения углов γ и θ между плоскостями, соответствующие одному шагу относительно поворота клиньев:

Максимальная погрешность при установке угла меньше или равна половине шага второй ступени: Δθmax ≤ 10-6(0,2″).
4. Порядок отсчета углов поворота клиньев
Углы поворота клиньев ϕ и ψ измеряются числами шагов N1 и N2, для отсчета которых использована специальная двухразрядная система счисления:
N1=a•b=35a+b,
N2=c•d=55c+d,
где a /0 - 18/ и c /0 - 28/ - количество циклов фиксации, b<35 и d<55 - числа шагов, меньших одного цикла.
Отсчет количества циклов a и c, величин b, d ведется по следующему правилу:
4.1. a=35-K'1, c=55-K'2, где K'1 и K'2 - номера отверстий, ближайших на подходе к начальным отметкам клиньев 1 и 3.
4.2. b= a+K1 *, d=c+K2 *, где K1 *, K2 * - номера отверстий со штифтом, не переходивших начальной отметки.
4.3. b=a+K'1 *-36, d=c+K'2 *-56, где K'1 * и K'2K* - номера заштифтованных отверстий, прошедших начальные отметки.
Коэффициент перехода от N1 к N2: K=55•56/35•36=2,45. N2=KN1.
5. Порядок пользования устройством
Использование устройства связано с решением системы тригонометрических уравнений (1) и (2) с помощью компьютера.
Для приближенного расчета можно представить θ = γ+θ2, где θ2 - приращение угла γ во второй ступени
θ2 ≈ -βcosψ = θ
Составляют сравнительно простые таблицы (1 и 2) по формулам (1) и (5.1) .
.
Последовательность операций при установке заданного угла θ с помощью компьютера:
5.1. В компьютер вводят величину θ, а он выдает соответствующие ей числа N1 и N2.
5.2. Поворотом клина 2 против хода часовой стрелки установить число N1 и зафиксировать штифтом первую ступень.
5.3. Пару клиньев 1,2 вращать по часовой стрелке до положения, соответствующего числу N2 и застопорить вторую ступень.
Установка заданного угла θ с помощью таблиц:
5.4 В составленной таблице 1 найти угол γ, самый близкий к заданному θ /меньше или больше его/ и соответствующее число N1.
5.5. Вычислить разность θ-γ = θ2 и по ней в составленной таблице 2 отыскать число N2 *.
5.6. Поворотом клина 2 установить число N1 и зафиксировать штифтом первую ступень.
5.7. Пару клиньев первой ступени вращать по часовой стрелке до положения, соответствующего числу N2 =N2 *+1/2KN1 и застопорить вторую ступень.


Изобретение относится к машиностроению. Способ точной установки углов между плоскостями с жесткой фиксацией осуществляется посредством системы из трех клиньев, при этом один из клиньев выполняют неподвижным, а два других выполняют поворотными. С помощью первой ступени указанного преобразователя изменяют угол между плоскостями в диапазоне от 0 до 45o, а с помощью второй ступени осуществляют точную коррекцию угла между плоскостями, при этом отсчитывают число шагов поворота клиньев. Устройство для осуществления способа включает в себя систему из трех клиньев с возможностью отсчета числа шагов поворота клиньев. Технический результат, достигаемый при реализации изобретения, состоит в повышении точности установки углов и упрощении средств для осуществления указанной установки. 2 c.п.ф-лы, 5 ил.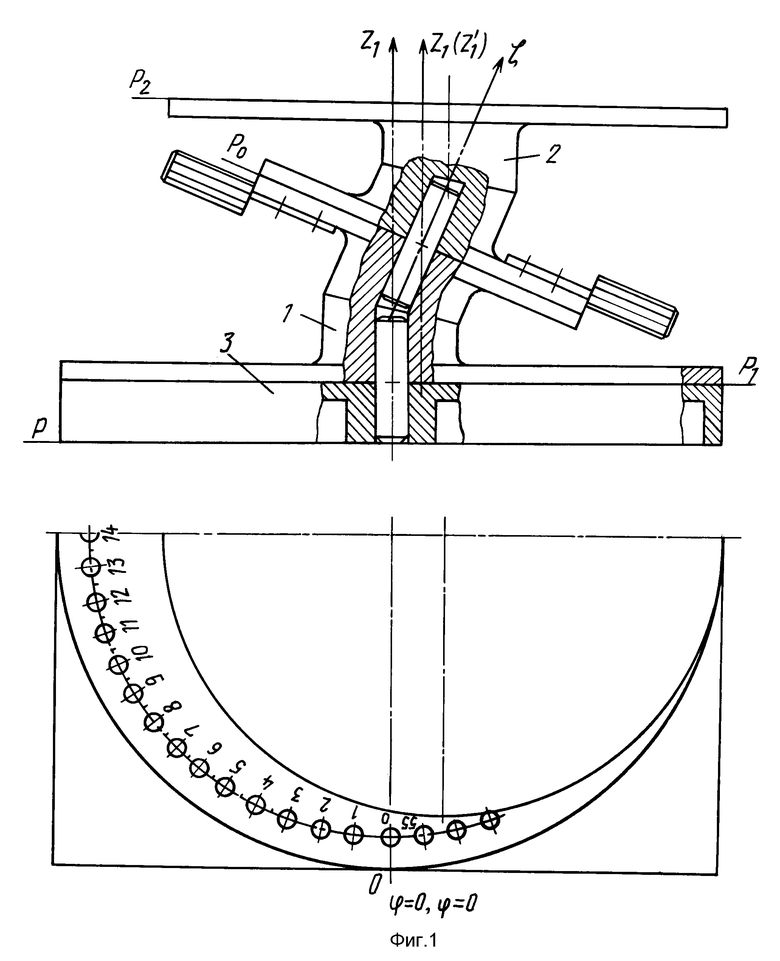
| US 4872267 A, 10.10.89 | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Артоболевский И.И | |||
| Механизмы в современной технике, т.III | |||
| - М.: Наука, 1979, с.318-319 | |||
| УГЛОМЕРНОЕ УСТРОЙСТВО | 0 |
|
SU406106A1 |
| АНОДНЫЙ БЛОК ДЛЯ МАГНЕТРОНА И МАГНЕТРОН (ВАРИАНТЫ) | 1998 |
|
RU2214647C2 |
