Изобретение относится к машино- и приборостроению и ставит своей целью использование свойства кинематической пары поворотных клиньев с разными углами для разработки многофункциональных регулировочно-измерительных устройств высокой точности и простых по конструкции.
Известно устройство для точной установки углов - патент США 4872267, кл. G 01 В 5/24, 10.10.1989 однако оно сложное по конструкции и неудобно в использовании.
Одноступенчатая коррекция угла между плоскостями с точностью 0,2" при помощи поворотного клина с углом 10-3 известна из патента RU 2160556 С2, кл. А 47 В 17/06, G 01 В 5/24, 20.12.2000, это устройство менее точное и не допускает широкого функционального использования.
Изобретение основано на свойстве кинематической пары поворотных клиньев с разными углами α и β (причем β<<α) изменять угол между плоскостями по гармоническому закону с малым передаточным отношением:
θ = α-βcosψ |0≤ψ≤π| (1)
а в окрестности экстремума функции θ(ψ):
с передаточным отношением  порядка 10-5÷10-6.
порядка 10-5÷10-6.
Для пары одинаковых клиньев с малыми углами:
где ϕ,ψ - углы относительного поворота клиньев,
θ,ϑ - углы между плоскостями пар клиньев.
Указанное свойство пар поворотных клиньев открывает возможность для разработки различных вариантов коррекции двухгранного угла α до конечной величины θ в диапазоне от α-ν до α+ν c различной точностью.
Задачей изобретения является разработка простейших по конструкции устройств высокой точности, обладающих широкими эксплуатационными возможностями.
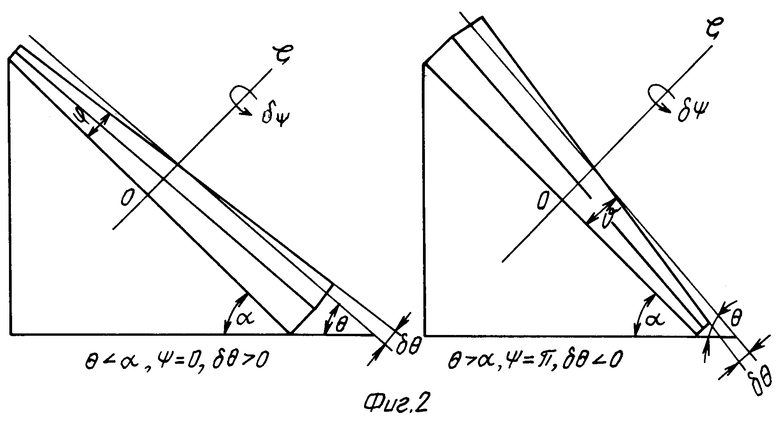
Фиг. 1 относится к одноступенчатому способу коррекции двухгранного угла, фиг.2 - к двухступенчатому способу.
Указанный технический результат достигается за счет того, что в одном варианте способ выполнен одноступенчатым, при этом коррекцию угла α до конечной величины θ в диапазоне от α - 10-3 до α + 10-3 с точностью 0,2" осуществляют путем поворота клина с углом β=10-3 относительно угла α на расчетный угол ψ, и геометрического сложения углов α и β по формуле (1): θ = α-βcosψ, где 0≤ψ≤π. Расчетный угол поворота корректирующего клина  .
.
Ошибка коррекции Δθ от погрешности при установке угла ψ:
При β = 10-3,  , Δψ = 10-3 Δθ = Δθmax = βΔψ = 10-6(0,2″).
, Δψ = 10-3 Δθ = Δθmax = βΔψ = 10-6(0,2″).
Указанный технический результат достигается вторым вариантом способа, при котором способ выполнен одноступенчатым, при этом коррекцию угла α до конечной величина θ в диапазоне от α - 10-3 до α + 10-3 с точностью 0,1" осуществляют посредством пары поворотных клиньев с углами β=5•10-4 путем предварительной установки двухгранного угла  на паре клиньев по формуле 3 и поворота для последующего алгебраического сложения его с углом α (установка их в положение ψ = 0 или ψ = π.
на паре клиньев по формуле 3 и поворота для последующего алгебраического сложения его с углом α (установка их в положение ψ = 0 или ψ = π.
Данная механическая система имеет две степени свободы с обобщенными координатами ϕ и ψ. Суммарная ошибка коррекции за счет погрешностей Δϕ и Δψ:  и ее составляющие при β=5•10-4, ϕ=0 и
и ее составляющие при β=5•10-4, ϕ=0 и  Δϕ=10-3, Δψ= 10-3
Δϕ=10-3, Δψ= 10-3

Указанный технический результат достигается третьим вариантом способа, при котором способ выполнен двухступенчатым, при котором коррекцию угла α до конечной величины θ в диапазоне от α - 10-3 до α + 10-3 с точностью 0,01" осуществляют посредством пары клиньев с углами  с дискретным относительным поворотом с шагом δϕ и соответственно
с дискретным относительным поворотом с шагом δϕ и соответственно  , осуществляемый в следующей последовательности: сначала на паре клиньев β, β по формуле (3) устанавливают и фиксируют двухгранный угол ϑ ==θ-α+Δϑ с припуском -δϑ≤Δϑ≤δϑ того же знака, что и разность θ-α. Затем производят алгебраическое сложение двухгранных углов α и ϑ, устанавливая их в положение ψ=0 или ψ = π. Наконец, осуществляют последнюю операцию - небольшое смещение зафиксированной пары клиньев на расчетный угол δψ, вычисляемый по формуле (2), чтобы полученное приращение δθ погасило припуск Δϑ.
, осуществляемый в следующей последовательности: сначала на паре клиньев β, β по формуле (3) устанавливают и фиксируют двухгранный угол ϑ ==θ-α+Δϑ с припуском -δϑ≤Δϑ≤δϑ того же знака, что и разность θ-α. Затем производят алгебраическое сложение двухгранных углов α и ϑ, устанавливая их в положение ψ=0 или ψ = π. Наконец, осуществляют последнюю операцию - небольшое смещение зафиксированной пары клиньев на расчетный угол δψ, вычисляемый по формуле (2), чтобы полученное приращение δθ погасило припуск Δϑ.
Ошибка коррекции из-за погрешности Δψ при этом будет:
Если принять β=5•10-4,  ,
,  , Δϑ = δϑ, Δψ=10-3, δϕ=5•103, то
, Δϑ = δϑ, Δψ=10-3, δϕ=5•103, то ,
, 
 е
е
Изобретение относится к машино- и приборостроению. Одноступенчатая коррекция двухгранного угла до заданной величины в диапазоне ±10-3 осуществляется с использованием одного поворотного клина с углом 10-3 с точностью 0,2" или пары поворотных клиньев с углами 5•10-4 с точностью 0,1". Двухступенчатая коррекции угла осуществляется посредством пары клиньев с углами 5•10-4 и дискретным относительным поворотом, на которой устанавливают и фиксируют двухгранный угол с припуском для последующей коррекции с точностью 0,01" за счет относительного смещения слагаемых углов из положения максимума или минимума их суммы на расчетный угол для погашения припуска с очень малым передаточным отношением. Изобретение обеспечивает простоту конструкции и расширение функциональных и эксплуатационных возможностей. 3 c.п.ф-лы, 2 ил.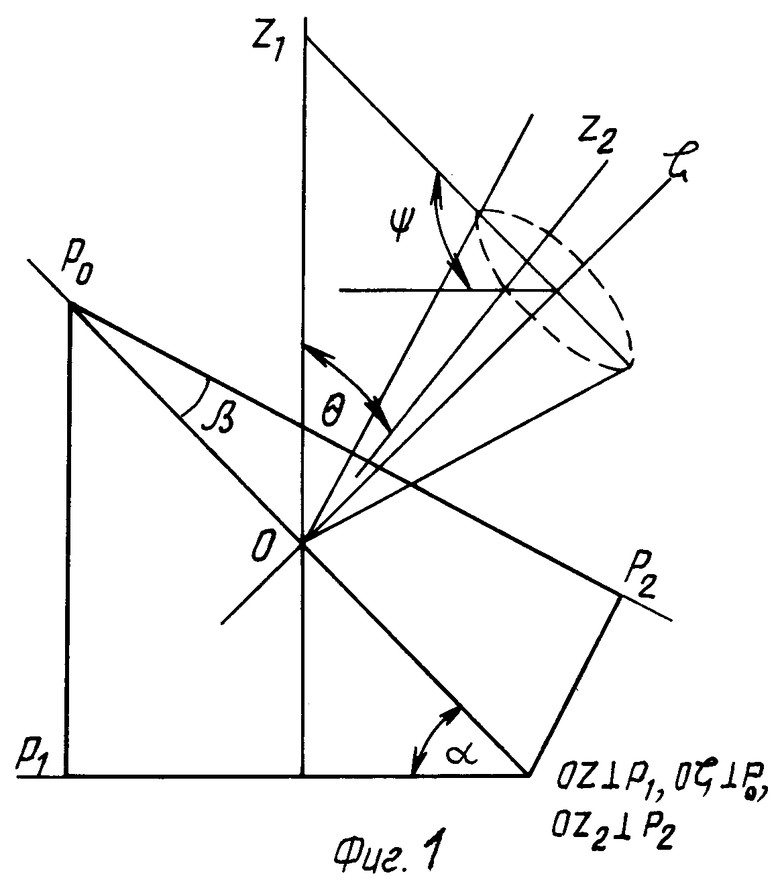
2. Способ коррекции двухгранного угла, основанный на свойстве кинематической пары поворотных клиньев изменять угол между плоскостями по гармоническому закону, отличающийся тем, что он выполнен одноступенчатым, при этом коррекцию угла α до конечной величины θ в диапазоне от α - 10-3 до α + 10-3 с точностью 0,1' осуществляют посредством пары поворотных клиньев с углами β = 5•10-4 путем предварительной установки двухгранного угла  на паре клиньев и поворота для последующего алгебраического сложения с углом α, при этом ошибку коррекции определяют по формуле
на паре клиньев и поворота для последующего алгебраического сложения с углом α, при этом ошибку коррекции определяют по формуле
3. Способ коррекции двухгранного угла, основанный на свойстве кинематической пары поворотных клиньев изменять угол между плоскостями по гармоническому закону, отличающийся тем, что он выполнен двухступенчатым, при этом коррекцию угла α до конечной величины θ в диапазоне от α - 10-3 до α + 10-3 с точностью 0,01'' осуществляют посредством относительного дискретного поворота пары клиньев с углами β с шагом δϕ в следующей последовательности: сначала на паре клиньев устанавливают и фиксируют двухгранный угол ϑ с припуском -δϑ≤Δϑ≤δϑ того же знака, что и разность θ-α, затем производят алгебраическое сложение двухгранных углов α и ϑ, а затем смещают зафиксированную пару клиньев на расчетный угол δψ, чтобы полученное приращение δθ погасило припуск Δϑ, при этом ошибку коррекции из-за погрешности Δψ определяют по формуле
| СЕЛИВАНОВ И.А | |||
| Пара поворотных клиньев и перспективы ее применения | |||
| ВЕСТНИК МАШИНОСТРОЕНИЯ, №1, 2001 | |||
| СПОСОБ ТОЧНОЙ УСТАНОВКИ УГЛОВ С ЖЕСТКОЙ ФИКСАЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2133011C1 |
| СТОЛ С ИЗМЕНЯЕМЫМ НАКЛОНОМ И УСТРОЙСТВО ДЛЯ ТОЧНОЙ УСТАНОВКИ УГЛОВ | 1999 |
|
RU2160556C2 |
| US 4872267 А, 10.10.1989 | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| АНОДНЫЙ БЛОК ДЛЯ МАГНЕТРОНА И МАГНЕТРОН (ВАРИАНТЫ) | 1998 |
|
RU2214647C2 |

