Изобретение относится к радиотехнике и может быть использовано в системах единого времени, радионавигационных системах наземного базирования, в пространственно распределенных системах контроля и управления при решении задач, связанных с синхронизацией шкал времени пространственно разнесенных пунктов.
Известно большое число устройств и систем, использующих разные способы синхронизации шкал времени (ШВ) пространственно разнесенных пунктов.
Для синхронизации ШВ используют, в частности, транспортируемые часы, как в устройстве для синхронизации часов [1] по патенту РФ N 2024042, кл. G 04 C 11/00, передаваемые по радиоканалу сигналы точного времени, как в часах с управлением по радио [2] по заявке Германии N 4230531. кл. G 04 C 11/02, излучение и двойную ретрансляцию маркерного сигнала, как в способе сличения ШВ [3] по а.с. СССР N 1644079, кл. G 04 C 11/02, или в способе синхронизации ШВ [4] по а.с. СССР N 1712942, кл. G 04 C 11/02.
В последнее время для синхронизации ШВ пространственно разнесенных пунктов используют сигналы подсистемы космических аппаратов (ПКА) спутниковых радионавигационных систем (СРНС).
Известна, например, система синхронизации часов по радиоканалу [5] по патенту РФ N 2037172, кл. G 04 C 13/00, 13/02, которая содержит группу ведущих часов, группу удаленных часов, центральные часы, синхронизатор СРНС, ПКА СРНС, линии связи от удаленных часов к центральным часам, линии связи от центральных часов к ведущим часам и к синхронизатору СРНС, радиоканал меток времени ведущих часов, навигационный радиоканал ПКА СРНС, радиоканал связи синхронизатора и ПКА СРНС.
В состав каждых ведущих часов входят: аппаратура приема шкалы системного времени (АПШВ), аппаратура сравнения ШВ (АСШВ), анализатор результатов привязки ШВ (РПШВ), блок памяти (БП), программный блок, формирователь сигналов управления и последовательно соединенные опорный генератор (ОГ), формирователь местной ШВ (ФШВ), формирователь сигналов времени и радиопередатчик.
В состав каждых удаленных часов входят: радиоприемник, АПШВ, АСШВ, РПШВ, измеритель разности времени и последовательно соединенные ОГ и ФШВ.
В состав центральных часов входят: коммутатор линий связи от удаленных часов, радиоприемник, АПШВ, АСШВ, РПШВ, измеритель разности времени, формирователь поправок и признаков достоверности, формирователь сигналов управления, ключ и последовательно соединенные ОГ и ФШВ.
На ведущих часах с использованием ОГ и ФШВ формируется ШВ, из сигналов которой формирователь сигналов времени формирует маркерный сигнал, который через радиопередатчик передается в радиоканал меток времени ведущих часов. Эти метки времени принимаются радиоприемниками на удаленных и центральных часах.
На удаленных часах по принятым меткам времени с учетом априорно известного времени распространения в измерителе разности времени и РПШВ формируются поправки к ШВ удаленных часов, которые с выхода РПШВ поступают на ФШВ удаленных часов и через линию связи от удаленных часов к центральным часам, где через коммутатор линий связи они поступают в формирователь поправок и признаков достоверности и используются для контроля качества синхронизации ШВ удаленных часов.
Метки времени от ведущих часов в центральных часах с учетом времени распространения сравниваются в измерителе разности времени с ШВ центральных часов и на основании полученных результатов в РПШВ и формирователе поправок и признаков достоверности формируются поправки для ШВ каждых из ведущих часов, групповая поправка по всей группе ведущих часов и контролируется качество синхронизации ведущих часов. По результатам контроля формирователь сигналов управления формирует разрешение на передачу сигналов коррекции ШВ на каждые из ведущих часов, которые через ключ центральных часов по линии связи поступают в БП ведущих часов и затем используются в программном блоке для формирования входного сигнала формирователя сигналов управления, сигналы с выхода которого используются для управления частотой и фазой ОГ ведущих часов, обеспечивая синхронизацию их ШВ относительно групповой ШВ, сформированной на центральных часах.
После выполнения всех описанных выше процедур предварительной синхронизации ШВ ведущих и удаленных часов относительно групповой ШВ на центральных часах с помощью АПШВ принимают по навигационному радиоканалу сигналы от ПКА СРНС и определяют с учетом априорно известных координат центральных часов текущее значение системного времени СРНС, которое в АСШВ сравнивается с ШВ центральных часов, и полученная поправка ШВ через РПШВ поступает в формирователь поправок и признаков достоверности для уточнения групповой ШВ. Кроме того, указанная поправка передается по линии связи в синхронизатор СРНС, где используется для синхронизации системной ШВ СРНС с ШВ центральных часов, после чего по радиоканалу связи синхронизатора и ПКА СРНС ШВ каждого космического аппарата (КА) из состава ПКА синхронизируется с системной ШВ СРНС.
Затем на каждых часах из групп ведущих и удаленных часов с помощью входящих в их состав АПШВ и АСШВ принимаются сигналы от ПКА и определяется поправка к собственной ШВ, которая затем используется для высокоточной синхронизации ШВ ведущих и удаленных часов между собой и с ШВ центральных часов.
Как следует из приведенного описания система [5] содержит большое число разнородных блоков и линий связи и требует последовательного проведения большого числа операций по предварительной синхронизации ШВ, что снижает надежность системы.
Кроме того, анализ качества синхронизации и формирование признаков достоверности в системе [5] обеспечивается только на центральных часах, что не обеспечивает оперативный контроль достоверности синхронизации ШВ на ведущих и удаленных часах.
Известна система формирования временных поправок по сигналам спутниковой радионавигационной системы к шкалам времени пространственно разнесенных пунктов, описанная в [6, с. 255,...,257, рис. 17.1, рис. 17.2]. Она принята в качестве прототипа. Структурная схема прототипа представлена на фиг. 2.
Система - прототип содержит ПКА 4 СРНС и N пространственно разнесенных пунктов (на фиг. 2 в качестве примера представлены i-й и j-й пункты из числа N пунктов). Каждый из пунктов, в том числе i-й и j-й пункты, содержит последовательно соединенные ОГ 1 и ФШВ 2, выход которого является выходом шкалы времени (ti или tj) данного пункта, i-го или j-го соответственно, где i ≠ j ϶ (1,..,N), а также устройство синхронизации (УС) 3, которое посредством навигационного радиоканала связано с ПКА 4 и содержит блок связи (БС) 5, приемопередающие входы - выходы которого являются входами - выходами канала связи УС 3 данного пункта с аналогичными УС 3 других пунктов. При этом задающий вход УС 3 соединен с выходом ФШВ 2. УС 3 содержит также АПШВ 16, радиочастотный вход которой является входом приема сигналов навигационного радиоканала УС 3, информационный вход АПШВ 16 является входом ввода в УС 3 точных координат данного пункта (например Xi, Yi, Zi для i-го или Xj, Yj, Zj для j-го пунктов соответственно), а выход АПШВ 16 подключен к первому входу АСШВ 17, выход которой является выходом системных поправок УС 3 τ
Система - прототип работает следующим образом.
В АПШВ 16 каждого пункта вводятся точные координаты этого пункта (например, Xi, Yi, Zi для i-го пункта). На радиочастотный вход АПШВ 16 поступают сигналы от ПКА 4. В сигнале каждого КА из состава ПКА 4 содержится метка времени, момент приема которой (ΔtAП) фиксируется в АПШВ 16 относительно аналогичной метки времени ее внутренней опорной ШВ. Кроме того, в служебной информации сигнала каждого КА из состава ПКА 4 передается информация, определяющая текущее положение КА на орбите, оцифровка передаваемой метки времени и поправочные коэффициенты, обеспечивающие расчет расхождения передаваемой с КА метки времени с соответствующей меткой времени системной ШВ СРНС. С использованием принятой информации и введенных точных координат пункта в АПШВ 16 рассчитываются поправки на распространение сигнала на трассе между КА из состава ПКА 4-АПШВ 16 (τp) и на расхождение переданной метки времени с меткой времени системной ШВ СРНС (τc). Оцифровка внутренней опорной ШВ АПШВ 16 приводится в соответствие с оцифровкой принятой метки времени и фиксируется величина поправки Δtc к внутренней ШВ tАП АПШВ 16 относительно системной ШВ СРНС
Δtc = ΔtAП-τp+τc. (1)
На выходе АПШВ 16 формируется системная ШВ
tc = tAП+Δtc (2)
Одновременно на каждом пункте, например i-м, в ФШВ 2 с использованием сигнала опорной частоты от ОГ 1 формируется местная ШВ ti. Сигналы с выходов ФШВ 2 и АПШВ 16 поступают на соответствующие входы АСШВ 17, где формируется системная поправка (относительно системной ШВ) для ШВ данного пункта
τ
Поправка τic выхода АСШВ 17 передается на первый вход сумматора 18 и на информационный вход БС 5, с приемопередающего входа - выхода которого через канал связи поправка τic поступает на приемопередающие входы - выходы БС 5 других пунктов. Одновременно с этим БС 5 данного пункта принимает значение поправки от других пунктов, например от j-го, которая поступает с информационного выхода БС 5 на второй инверсный вход сумматора 18, на выходе которого формируется относительная поправка вида
τ
Таким образом, в системе - прототипе за счет использования сигналов от ПКА 4 в УС 3 обеспечивается на каждом из N пространственно разнесенных пунктов системы формирование поправок к местной ШВ как относительно системной ШВ (системные поправки), так и относительно ШВ любого из N пунктов системы (относительные поправки).
Однако в системе - прототипе указанные задачи решаются только при наличии априорного задания точных координат каждого из N пунктов, что ограничивает использование системы - прототипа случаем расположения N пунктов системы в местах с известными точными координатами. Также в системе - прототипе не контролируется текущая погрешность определения поправок, что снижает их достоверность. Кроме того, формируемые в системе - прототипе поправки имеют низкую точность, обусловленную структурными особенностями системы.
Для подтверждения последнего утверждения рассмотрим подробнее характеристики поправок, формируемых в системе - прототипе.
Каждое определение ΔtAП в АПШВ 16 производится с погрешностью Δизм, обусловленной наличием шумов в сигналах, принимаемых от ПКА 4, и погрешностями процедур измерения. Кроме того, действительное запаздывание сигнала на трассе КА из состава ПКА 4-АПШВ 16 отличается от расчетного значения τp на величину Δp, обусловленную влиянием неидеальностей параметров трассы (отклонения в ионосфере, тропосфере и т.п.). Расчет поправок τp и τc также производится с погрешностями Δpp и Δpc, которые вызваны погрешностями описания положения КА на орбите, ошибками задания поправочных коэффициентов для расчета текущего рассогласования ШВ КА с системной ШВ и ошибками задания координат пункта, на котором проводится определение поправок. В результате конкретное значение однократного определения tc в АПШВ 16 будет иметь следующий вид
tc = tAП+Δtc = t0c+Δизм+Δpp+Δpc+Δp, (5)
где t0c - истинное значение системной ШВ.
Кроме того, согласно (2) и (5) определение tc в АПШВ 16 проводится, как следует из структуры системы - прототипа, с использованием внутренней опорной шкалы АПШВ 16 tАП, текущие значения которой отличаются от значений t местной ШВ пункта на некоторую величину ΔШВ(t)
tAП = t+ΔШВ(t). (6)
Тогда согласно (3), с учетом (5) и (6), получим на i-м пункте
τ
где ΔΣic = ΔШВi+Δизмi+Δppi+Δpci,
τ0ic - истинное значение системной поправки к ШВ i-го пункта.
Соответственно для j-го пункта
τ
В результате согласно (4), (7) и (8) значение относительной поправки τ
τ
Кроме рассмотренных составляющих погрешности определения временных поправок в системе - прототипе имеют место также составляющие Δzic и Δzij, обусловленные запаздыванием определения указанных поправок из-за задержек в АПШВ 16, АСШВ 17, БС 5, сумматоре 18 и в канале связи между отдельными пунктами системы. В итоге получим
τ (11)
(11)
Заявляемое изобретение направлено на расширение возможностей использования системы формирования временных поправок, в частности на случай, когда N пунктов системы расположены в местах с априорно неизвестными точными координатами, повышение точности и достоверности формируемых поправок.
Поставленные задачи решаются за счет того, что в системе формирования временных поправок по сигналам спутниковой радионавигационной системы к шкалам времени пространственно разнесенных пунктов, содержащей подсистему космических аппаратов спутниковой радионавигационной системы и N пространственно разнесенных пунктов, каждый из которых содержит последовательно соединенные опорный генератор и формирователь шкалы времени, выход которого является выходом шкалы времени данного пункта, а также устройство синхронизации, которое посредством навигационного радиоканала связано с подсистемой космических аппаратов спутниковой радионавигационной системы и содержит блок связи, приемопередающие входы - выходы которого являются входами - выходами канала связи данного устройства синхронизации с устройствами синхронизации других пунктов, а задающий вход устройства синхронизации соединен с выходом формирователя шкалы времени, в каждое устройство синхронизации введены приемоизмеритель спутниковой радионавигационной системы, блок управления, блок памяти, блок экстраполяции поправок, блок сравнения поправок, блок контроля качества синхронизации, блок осреднения координат, блок усреднения ансамбля поправок, блок сглаживания временных поправок и блок сравнения с опорными значениями, причем радиочастотный вход приемоизмерителя является входом приема сигналов навигационного радиоканала устройства синхронизации, опорный вход приемоизмерителя соединен с выходом опорного генератора, выход меток времени внутренней шкалы времени приемоизмерителя подключен ко входу установки формирователя шкалы времени, информационный вход которого связан через первую шину информационного обмена с информационными входами - выходами приемоизмерителя и блока связи, а также с первыми информационными входами - выходами блока памяти и блока управления, задающий вход которого является задающим входом устройства синхронизации, а вторые информационные входы - выходы блока управления и блока памяти связаны второй шиной информационного обмена с информационными входами - выходами блока экстраполяции поправок, блока сравнения поправок, блока контроля качества синхронизации, блока осреднения координат, блока усреднения ансамбля поправок, блока сглаживания временных поправок и блока сравнения с опорными значениями, причем исполнительные выходы блока экстраполяции поправок, блока сравнения поправок и блока контроля качества синхронизации являются соответственно выходами системных поправок, относительных поправок и признака качества временных поправок устройства синхронизации.
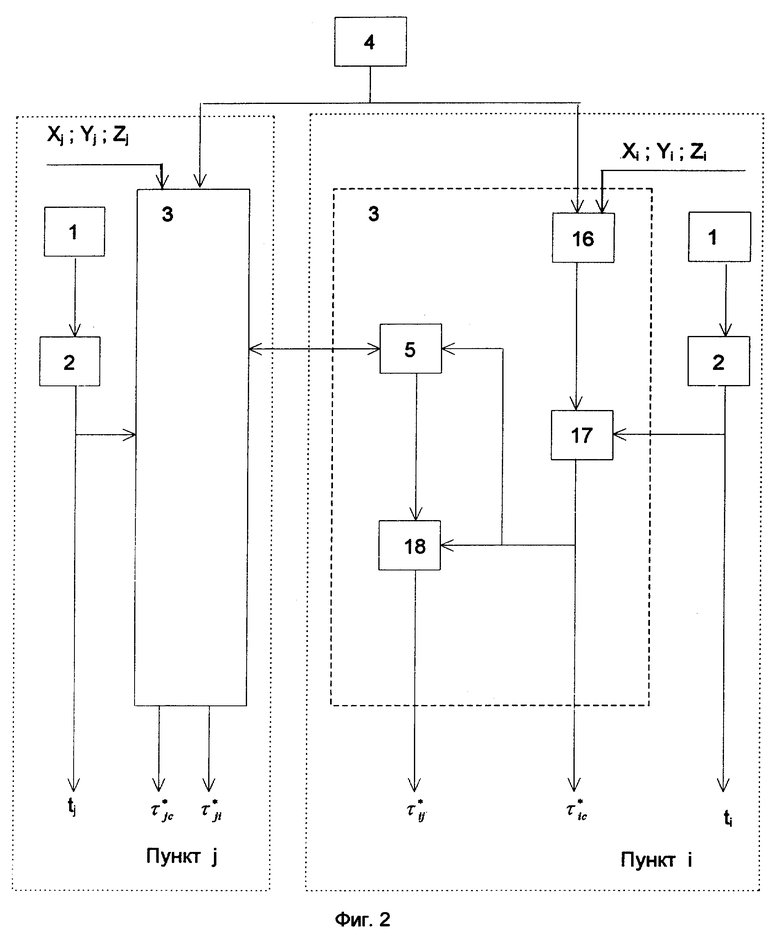
Сущность изобретения, возможность его осуществления и решения поставленных технических задач поясняется чертежами, представленными на фиг. 1 и 2, где на фиг. 1 изображена структурная схема заявляемой системы в одном из возможных вариантов исполнения, а на фиг. 2 - структурная схема системы - прототипа.
Заявляемая система формирования временных поправок по сигналам спутниковой радионавигационной системы к шкалам времени пространственно разнесенных пунктов содержит (фиг. 1) N пространственно разнесенных пунктов (на фиг. 1 в качестве примера представлены i-й и j- й пункты из числа N пунктов), каждый из которых содержит последовательно соединенные опорный генератор (ОГ) 1 и формирователь шкалы времени (ФШВ) 2, выход которого является выходом ШВ данного пункта и соединен с задающим входом устройства синхронизации (УС) 3, у которого вход приема сигналов навигационного радиоканала через навигационный радиоканал связан с подсистемой космических аппаратов (ПКА) 4 спутниковой радионавигационной системы (СРНС), причем каждое УС 3 содержит блок связи (БС) 5, приемопередающие входы - выходы которого являются входами - выходами канала связи данного УС 3 с УС 3 других пунктов, а информационный вход - выход БС 5 связан через первую шину информационного обмена с информационным входом - выходом приемоизмерителя (ПИ) 6 спутниковой радионавигационной системы, с первыми информационными входами - выходами блока управления (БУ) 7 и блока памяти (БП) 8 и с информационным входом ФШВ 2, вход установки которого соединен с выходом меток времени внутренней ШВ ПИ 6, опорный вход которого подключен к выходу ОГ 1, а радиочастотный вход ПИ 6 является входом приема сигналов навигационного радиоканала УС 3, а задающий вход БУ 7 является задающим входом УС 3, причем вторые информационные входы - выходы БУ 7 и БП 8 связаны второй шиной информационного обмена между собой и с информационными входами - выходами блока экстраполяции поправок (БЭП) 9, блока сравнения поправок (БСП) 10, блока контроля качества синхронизации (БККС) 11, блока осреднения координат (БОК) 12, блока сглаживания временных поправок (БСВП) 13, блока усреднения ансамбля поправок (БУАП) 14 и блока сравнения с опорными значениями (БСОЗ) 15, причем исполнительные выходы БЭП 9, БСП 10 и БККС 11 являются выходами системных поправок, относительных поправок и признака качества временных поправок УС 3 данного пункта.
Все элементы заявляемой системы могут быть реализованы с использованием стандартных или известных блоков, устройств, систем.
В качестве ПКА 4 может использоваться действующая подсистема космических аппаратов СРНС ГЛОНАСС или НАВСТАР.
Реализация ОГ 1 возможна в виде стандарта частоты 17Н746 "Сапфир".
ФШВ 2 может быть выполнена на базе аппаратуры управления и синхронизации (АУС) наземной передающей станции Е711 отечественной импульсно-фазовой радионавигационной системы РСДН-10 (децимальный номер ОЦ2.702.075) или аналогичной АУС импульсно-фазовой радионавигационной системы "Чайка", децимальный номер ОЦ1.400.350.
БС 5 в зависимости от реализации канала связи между УС 3 разных пунктов (телефонная линия или радиоканал) может быть соответственно выполнено с применением модема типа ZyXEL1496P или радиостанции (например, KB диапазона типа Р130 или Р140).
Реализация ПИ 6 возможна на основе использования, например, стандартного ПИ СРНС типа Star Finder GPS 700, или Шкипер - М, или GNSS - 300, или ASN - 16, или GG24 Machine Control Board, или им подобных.
БУ 7, БП 8, БЭП 9, БСП 10, БККС 11, БОК 12, БСВП 13, БУАП 14 и БСОЗ 15 могут быть реализованы средствами стандартного персонального компьютера с использованием соответствующих пользовательских программ в составе программно-математического обеспечения. ПЭВМ, например типа Pentium, или 486DX4, или "Багет", или "Бриз". Алгоритмы, реализующие функции соответствующих блоков, рассмотрены ниже, при описании работы заявляемой системы.
Соответствующие шины информационного обмена и входы - выходы блоков могут быть реализованы на базе стандартных портов и линий связи. В частности, первая шина информационного обмена между блоками 2, 5, 6, 7, 8 может быть выполнена с использованием интерфейса типа RS -232, или по ГОСТ 18977-79 РТМ 1495-75, или по ГОСТ 26765.52-87. Реализация второй шины информационного обмена возможна в виде системной шины ПЭВМ класса ISA или PSA.
Исполнительные выходы БЭП 9, БСП 10 и БККС 11, а также задающий вход БУ 7 могут быть выполнены с использованием стандартных СОМ-портов типа RS-232.
Заявляемая система работает следующим образом.
На радиочастотный вход ПИ 6 каждого из N пунктов поступают сигналы от ПКА 4. По стандартной процедуре ПИ 6 осуществляет поиск и захват сигналов от КА, входящих в состав ПКА 4, производит по сигналу каждого из синхронизированных КА радионавигационные измерения первичных радионавигационных параметров, считывание и запись служебной информации, содержащейся в сигналах этих КА и на основе этих данных определяет координаты пункта (например, X, Y, Z), на котором ПИ 6 размещен. Используемые при этом процедуры известны и описаны в большом числе источников, в частности в [6, стр. 105,..., 141, 213, ..., 248, 317,..., 327]. Полученные координаты, например Xi, Yi, Zi для i-го пункта, передаются с информационного входа-выхода ПИ 6 через первую шину информационного обмена на первый информационный вход-выход БП 8, где они запоминаются. При этом координаты определяются с ошибкам Δxi, Δyi, Δzi, составляющие которых, причины их возникновения и характер априорных распределений известны и описаны, в частности в [6, стр. 114, 115, 136, ..., 141, 248,...,254, 273,..., 282, 299,..., 311].
По мере накопления в БП 8 массива измерений координат он передается через вторую шину информационного обмена в БОК 12, где производится осреднение координат и оценка параметров апостериорного распределения по каждой из координат. В простейшем случае это математическое ожидание  и дисперсия σ2 xi координат соответствующего i-го пункта, определенные как
и дисперсия σ2 xi координат соответствующего i-го пункта, определенные как (12)
(12)
где l - порядковый номер отсчета координаты;
m - объем массива выборки;
Xil - значение l-го отсчета координаты на i-м пункте.
При этом время осреднения Тос.к (и соответственно значение m) выбирается на основании известных параметров априорного распределения составляющих ошибок Δxi(Yi,Zi) и в зависимости от используемого в ПИ 6 алгоритма навигационных определений может составлять от нескольких часов до нескольких суток.
Контроль Тос.к ведется в БУ7, на задающий вход которого поступают текущие отсчеты времени ti с выхода ФШВ 2, формирующего местную ШВ i-го пункта из тактового сигнала от ОГ 1. В частности, такой контроль может производится на основе проверки
Δti = ti-tioк ≤ Toc.к, (13)
где tioк - время начала процедуры осреднения координат.
По результатам проверки при Δti = Toc.к по команде, передаваемой по второй шине информационного обмена от БУ7 в БОК 12, значение σ
Если условие
σXi(Yi,Zi) ≤ Δo (14)
не выполняется, то по соответствующему сигналу, поступающему из БСОЗ 15, в БУ 7 производится увеличение времени осреднения Тос.к и продлевается процедура осреднения координат в БОК 12 согласно (12), по окончании которой в БСОЗ 15 вновь проверяется выполнение условия (14). При его выполнении БУ 7 вырабатывает команду на занесение в БП 8 из БОК 12 полученных осредненных значений  в качестве истинных координат i-го пункта (X0i, Y0i, Z0i). Затем по команде от БУ 7 производится передача по первой шине информационного обмена значений X0i, Y0i, Z0i из БП 8 в ПИ 6, после чего определяются временные поправки τic и τij согласно описанной ниже процедуре.
в качестве истинных координат i-го пункта (X0i, Y0i, Z0i). Затем по команде от БУ 7 производится передача по первой шине информационного обмена значений X0i, Y0i, Z0i из БП 8 в ПИ 6, после чего определяются временные поправки τic и τij согласно описанной ниже процедуре.
Внутренняя шкала времени tАП ПИ 6 формируется с использованием сигнала, поступающего с выхода ОГ 1 на опорный вход ПИ 6. При этом tАП и местная ШВ i-го пункта ti, формируемая ФШВ 2, совпадают между собой с точностью до некоторой постоянной
ΔШВ0 = (η+λ)TМВ, (15)
где ТМВ - период следования меток времени внутренней ШВ на соответствующем выходе ПИ 6,
η = 1,2,3.... - определяет целое число ТМВ в ΔШВ0,
λ ≤ 1 - определяет величину некратности ТМВ и ΔШВ0.
При подаче сигнала меток времени с выхода ПИ 6 на вход установки ФШВ 2 производится совмещение границ соответствующих интервалов ti на выходе ФШВ 2 с метками времени ПИ 6, что обеспечивает в (15) λ = 0 Кроме того код оцифровки внутренней ШВ ПИ6 с его информационного входа-выхода через первую шину информационного обмена поступает на информационный вход ФШВ 2 и заносится в ФШВ 2 для оцифровки меток времени местной ШВ ti, что обеспечивает в (15) η = 0.
Далее в ПИ 6, как и в АПШВ 16 системы-прототипа, определяется согласно (1) поправка Δtc. Но, так как в (15) η = λ = 0, tАП = ti, следовательно
ΔШВi = 0 и Δtc = τic (16)
При этом согласно (7) и (16)
τic = τ0ic+εΣi, (17)
где εΣi = Δизмi+Δppi+Δp0i.
Соответственно, на j-м пункте
τjc = τ0jc+εΣj (18)
Каждый отсчет системной поправки τicl с информационного входа-выхода ПИ 6 передается через первую шину информационного обмена на первый информационный вход-выход БП 8, где он записывается в массив измерений системных поправок вместе с кодом времени его получения. По мере накопления в БП 8 массива измерений системных поправок указанные отсчеты передаются по второй шине информационного обмена в БСВП 13, где с использованием стандартных процедур, например метода наименьших квадратов, калмановской фильтрации и т. п. , производится их усреднение и оценка параметров апостериорного распределения, в качестве которых обычно используются коэффициенты априорно выбранной интерполирующей функции и дисперсия. В частности, при использовании в качестве интерполирующей функции полинома второго порядка с усреднением по методу наименьших квадратов получается система уравнений (19)
(19)
где a0, a1, a2 - коэффициенты интерполирующего полинома,
τici - отсчеты системной поправки,
L - объем массива отсчетов τici.
Решение системы уравнений (19) относительно неизвестных а0, а1, а2 в БСВП 13 дает их оценки а0 *, а1 *, а2 * и соответственно l-е значения интерполирующей функции
τ
Затем определяется апостериорная ошибка оценки временной поправки (21)
(21)
и среднее на интервале сглаживания значение системной поправки
 (22)
(22)
Полученные значения a0 *, a1 *, a2 *, εΣiμ, τ
Следует отметить, что получение оценки τ
ТL=L•Тl, (23)
где Tl - дискрет времени получения отсчетов τicl на выходе ПИ 6.
Чтобы уменьшить возникающую при этом динамическую ошибку формирования системной поправки значения τ передается на исполнительный выход БЭП 9
передается на исполнительный выход БЭП 9 (24)
(24)
Ошибка εi определения τic в (17) на каждом μ-ом сеансе работы ПИ 6 по сигналу некоторого КА из состава ПКА 4 может быть представлена в общем случае в виде суммы двух составляющих
εiμ = miμ+σiμ, (25)
где miμ - смещение τic на μ-ом сеансе,
σiμ - составляющая ошибки, флюктуирующая на μ-ом сеансе.
Факторы, обуславливающие появление этих составляющих в оценке τic на выходе ПИ 6, подробно рассмотрены в [6, стр. 255, ..., 263]. В результате, при каждом сеансе определения  в БСВП 13 в соответствии с (21) будет усредняться только составляющая σiμ и εiμ можно записать как
в БСВП 13 в соответствии с (21) будет усредняться только составляющая σiμ и εiμ можно записать как (26)
(26)
В то же время, как следует из [6, стр. 110,..., 114, 136,..., 138, 251, 299, . .., 305 ] значение miμ для разных сеансов определения  случайно. Поэтому появляется возможность усреднения miμ на основе использования, ансамбля оценок τ
случайно. Поэтому появляется возможность усреднения miμ на основе использования, ансамбля оценок τ
На каждом сеансе определения системной поправки в БП 8 записываются значения τ (27)
(27)
Далее каждое из М значений τ (28)
(28)
Затем значения τ (29)
(29)
При этом в силу декорреляции составляющих εiμ в (26) для различных μ из M, εcpi определяется выражением (30)
(30)
Полученные значения τ (31)
(31)
Полученное значение τ
χicμ = |τ
Значение невязки χicμ передается из БСОЗ 15 в БККС 11, где на основе ее сравнения с априорно установленным значением допустимого отклонения системной поправки (Δc) вырабатывается признак качества системной поправки, например как (33)
(33)
Полученный признак качества системной поправки запоминается в БП 8 и передается на исполнительный выход БККС 11. Одновременно значения τ
Поступающие на приемопередающий вход-выход БС 5 данного i-го пункта с приемопередающего входа-выхода БС 5 другого пункта (например, j-го) значения τ (34)
(34)
Одновременно в БСП 10 из БП 8 поступают значения εjμ и εiμ и формируется текущая оценка "невязки" относительной поправки, например как (35)
(35)
Полученное значение χijμ из БСП 10 передается в БККС 11, где на основе ее сравнения с априорно установленным значением допустимого отклонения относительной поправки (Δотн) вырабатывается признак качества относительной поправки, например как (36)
(36)
Одновременно значения τ из БЭП 9 передается в БСП 10, куда поступает Кij из БККС 11, который передается также на исполнительный выход БККС 11.
из БЭП 9 передается в БСП 10, куда поступает Кij из БККС 11, который передается также на исполнительный выход БККС 11.
В БСП 10 при удовлетворительной оценке качества (например, Кij = 1) вырабатывается разрешение на передачу на исполнительный выход БСП 10 полученной оценки 
Формируемые на исполнительных выходах БЭП 9 и БСП 10 системные и относительные поправки с учетом признака качества, формируемого на исполнительном выходе БККС 11, затем используются, в зависимости от поставленной задачи, либо для синхронизации местной шкалы времени пункта, либо для соответствующего смещения моментов формирования сигналов, которые синтезируются на данном пункте в соответствии с функциональным назначением последнего.
Таким образом, введение в заявляемую систему новых блоков и новых связей между ними обеспечивает:
в соответствии с (12) и (14) - высокоточное определение координат каждого из N пунктов системы, что снимает требования точного априорного знания этих координат для решения задачи синхронизации ШВ N пространственно разнесенных пунктов;
в соответствии с (33) и (36) - контроль качества формируемых системных и относительных поправок к местной ШВ каждого из N пунктов системы;
повышение точности определения системных и относительных поправок, что следует из (25) и (34) с учетом (16), (24), (26) и (35).
Совокупность указанных положительных особенностей заявляемой системы обеспечивает расширение возможностей по ее использованию, повышение точности и достоверности формируемых текущих поправок к местной шкале времени каждого из N пунктов системы.
Из проведенного рассмотрения видно, что заявляемая система технически реализуема, решает поставленные задачи и может найти применение в системах синхронизации ШВ N пространственно разнесенных пунктов для систем единого времени, радионавигационных систем наземного базирования, пространственно распределенных систем контроля и управления и т.п.
Источники информации
1. Пат. РФ 2024042, кл. G 04 C 11/02. опубл. 30.11.94.
2. Заявка Германии 4230531, кл. G 04 C 11/02. опубл. 18.11.93
3. A.C. CCCP 1644079, кл. G 04 C 11/02, опубл. 23.04.91
4. A.C. CCCP 1712942, кл. G 04 C 11/02.опубл. 15.02.92.
5. Пат. РФ 2037172, кл. G04C 13/00, 13/02, опубл. 09.06.95.
6. Сетевые спутниковые радионавигационные системы / В.С.Шебшаевич, П.П. Дмитриев, Н.В.Иванцевич и др. /Под ред. В.С.Шебшаевича. - М.: Радио и связь, 1993, с. 255, .... 257, рис. 17.1, рис. 17.2 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРАЛЬНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2112991C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСТОТЫ И ШКАЛЫ ВРЕМЕНИ УДАЛЕННЫХ ПУНКТОВ | 2015 |
|
RU2585325C1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ СИГНАЛОВ ТОЧНОГО ЕДИНОГО ВРЕМЕНИ (ТЕВ) ПО ТЕЛЕКОММУНИКАЦИОННОЙ СЕТИ И СИСТЕМА РАСПРЕДЕЛЕНИЯ СИГНАЛОВ ТОЧНОГО ЕДИНОГО ВРЕМЕНИ | 2008 |
|
RU2381538C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ СИГНАЛОВ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1997 |
|
RU2111504C1 |
| УСТРОЙСТВО ИНСТРУМЕНТАЛЬНОГО КОНТРОЛЯ СИГНАЛОВ РАДИОНАВИГАЦИОННОГО ПОЛЯ ИМПУЛЬСНО-ФАЗОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2019 |
|
RU2745961C2 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2184381C1 |
| СПОСОБ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 1997 |
|
RU2115937C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1995 |
|
RU2115946C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1995 |
|
RU2080646C1 |
Система относится к радиотехнике и может использоваться при решении задач, связанных с синхронизацией шкал времени пространственно разнесенных пунктов. Система содержит подсистему космических аппаратов спутниковой радионавигационной системы (ПКА СРНС) и N пространственно разнесенных пунктов, каждый из которых содержит опорный генератор, формирователь шкалы времени и связанное с ними устройство синхронизации (УС). Каждое из УС связано навигационным радиоканалом с ПКА СРНС и содержит блок связи с УС синхронизации других пунктов. В каждое из УС введен приемоизмеритель СРНС, блоки управления, памяти, экстраполяции поправок, сравнения поправок, контроля качества синхронизации, осреднения координат, усреднения ансамбля поправок, сглаживания временных поправок и блок сравнения с опорными значениями. Каждое УС принимает сигналы навигационного радиоканала и канала связи с другими УС и формирует на своих выходах системные поправки, относительные поправки и признак качества временных поправок. Система обеспечивает повышение точности определения и оперативный контроль качества системной и относительной поправок к местной шкале времени каждого из N пунктов при отсутствии точного знания координат этих пунктов. 2 ил.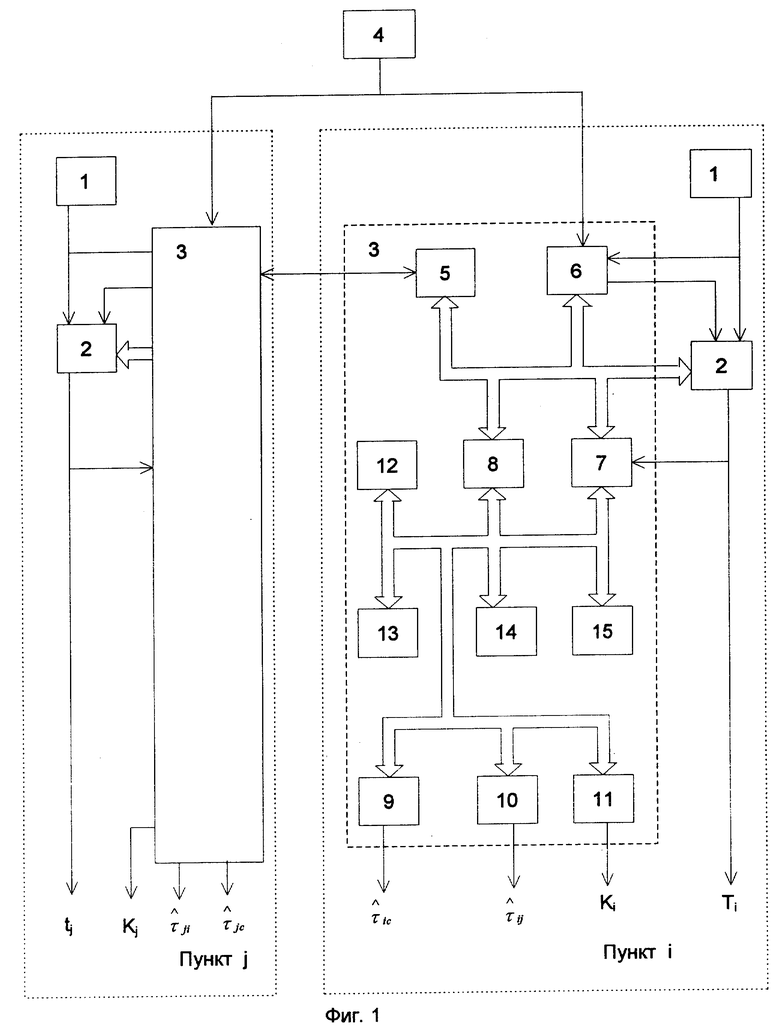
Система формирования временных поправок по сигналам спутниковой радионавигационной системы к шкалам времени пространственно разнесенных пунктов, содержащая подсистему космических аппаратов спутниковой радионавигационной системы и N пространственно разнесенных пунктов, каждый из которых содержит последовательно соединенные опорный генератор и формирователь шкалы времени, выход которого является выходом шкалы времени данного пункта, а также устройство синхронизации, которое посредством навигационного радиоканала связано с подсистемой космических аппаратов спутниковой радионавигационной системы и содержит блок связи, приемопередающие входы-выходы которого являются входами-выходами канала связи данного устройства синхронизации с устройствами синхронизации других пунктов, а задающий вход устройства синхронизации соединен с выходом формирователя шкалы времени, отличающаяся тем, что в каждое устройство синхронизации введены приемоизмеритель спутниковой радионавигационной системы, блок управления, блок памяти, блок экстраполяции поправок, блок сравнения поправок, блок контроля качества синхронизации, блок осреднения координат, блок усреднения ансамбля поправок, блок сглаживания временных поправок и блок сравнения с опорными значениями, причем радиочастотный вход приемоизмерителя является входом приема сигналов навигационного радиоканала устройства синхронизации, опорный вход приемоизмерителя соединен с выходом опорного генератора, выход меток времени внутренней шкалы времени приемоизмерителя подключен к входу установки формирователя шкалы времени, информационный вход которого связан через первую шину информационного обмена с информационными входами-выходами приемоизмерителя и блока связи, а также с первыми информационными входами-выходами блока памяти и блока управления, задающий вход которого является задающим входом устройства синхронизации, а вторые информационные входы-выходы блока управления и блока памяти связаны второй шиной информационного обмена с информационными входами-выходами блока экстраполяции поправок, блока сравнения поправок, блока контроля качества синхронизации, блока осреднения координат, блока усреднения ансамбля поправок, блока сглаживания временных поправок и блока сравнения с опорными значениями, причем исполнительные выходы блока экстраполяции поправок, блока сравнения поправок и блока контроля качества синхронизации являются соответственно выходами системных поправок, относительных поправок и признака качества временных поправок устройства синхронизации.
| В.С | |||
| Шебшаевич, П.П | |||
| Дмитриев, Н.В | |||
| Иванцевич и др | |||
| Сетевые спутниковые радионавигационные системы/Под ред | |||
| В.С | |||
| Шебшаевича | |||
| - М.: Радио и связь, 1993, с.255-257, рис.17.1, рис.17.2 | |||
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1995 |
|
RU2080646C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1990 |
|
RU2037172C1 |
| Способ перегрузки пакетного груза | 1972 |
|
SU564220A1 |

