Изобретение относится к радиотехнике, в частности к радионавигационным системам определения местоположения объектов, использующих режим дифференциальной коррекции.
В настоящее время известна спутниковая радионавигационная система (СРНС) под названием "Глобальная система местоопределения (GPS) или "Navstar" (Navigation (USA), 1978, v. 25, N 2), способствующая определению местонахождения любых объектов-потребителей. Существует также Глобальная спутниковая РНС, получившая название ГЛОНАСС (WO 91/11732). Они имеют высокие базовые эксплуатационные характеристики и удовлетворяют навигационным требованиям широкого круга пользователей. Тем не менее, при использовании СРНС возникают, по крайней мере, две проблемы.
Первая проблема заключается в том, что для целого ряда навигационных задач стандартной точности СРНС оказывается недостаточно и для ее повышения приходится использовать специальные режимы местоопределений (для принятой классификации, см. , например, "Глобальная спутниковая радионавигационная система ГЛОНАСС", под ред. Харисова В.Н., Москва, ИПРЖР, 1997 и "Российский радионавигационный план". Основные направления развития радионавигационных систем и средств, Москва, 1993, Межведомственная комиссия "Интернавигация"). Способы организации таких режимов известны. Они предполагают установку либо контрольно-корректирующей станции (ККС) в центре локальной рабочей зоны, либо базовой станции (БС) в точке координации с последующим определением соответственно дифференциальных поправок или координат БС и передачей их по каналам связи конечным пользователям.
Однако на практике объединить отдельные локальные навигационные системы в одну широкозонную навигационную систему сложно: появление нескольких одновременно работающих ККС (или БС) требует их селекции в каналах связи. Различие в алгоритмах работы комплектов аппаратуры потребителей (КАП) приводит к необходимости включать ионосферные поправки в общие дифференциальные поправки для одних потребителей и исключать их для других. При выборе канала связи приходится выбирать максимальный трафик из расчета обслуживания наиболее критичного потребителя, хотя большинство пользователей устроила бы существенно меньшая загрузка канала связи. Кроме того, для мобильного потребителя по мере его движения необходимо организовать переключение между отдельными локальными зонами, которое по существующей концепции возлагается на аппаратуру потребителя. Это существенно усложняет КАП и повышает ее стоимость, требуя к тому же введения единого стандарта на канал связи. Все это не позволяет использовать имеющийся парк КАП, поскольку требует как ее доработки, так и установки на объектах пользователей сложных и дорогих каналов связи. Из-за перечисленных трудностей создаются только отдельные ведомственные подсистемы высокоточной навигации, как правило, для решения конкретных задач в пределах одной локальной зоны и для ограниченной номенклатуры пользователей, а число пользователей единичных существующих широкозонных систем по-прежнему остается незначительным.
В целом можно утверждать, что одна из проблем применения существующих СРНС заключается в невозможности создания единой общедоступной высокоточной навигационной системы из-за технических сложностей объединения локальных зон высокоточной навигации в рамках одной системы при приемлемых затратах на ее создание.
Другая проблема состоит в принципиальном различии методов местоопределений в реальном масштабе времени и в режиме постобработки, где собранные в реальном масштабе времени навигационные параметры архивируются и далее могут использоваться в любой момент времени по усмотрению пользователя. Последнее требует создания банка навигационных параметров, как правило, для решения одной конкретной задачи. Поэтому использование постобработки в единых системах на сегодня не предусматривается.
В общем случае методы решения навигационных задач могут существенно различаться. Тем не менее, их можно объединить и при ограниченных затратах создать единую навигационно-информационную систему для решения различных задач навигации. Как следствие достижений использованных информационных технологий, дополнительным преимуществом предлагаемой системы будет ее простая наращиваемость, доступность и легкость адаптации под меняющиеся индивидуальные требования конечных пользователей.
Изобретение направлено на создание такого комплекса аппаратуры, который позволил бы повысить точность местоопределения и достоверность передаваемых потребителю навигационных параметров, а также расширить область обслуживания. Это достигается за счет того, что спутниковая радионавигационная система определения местоположения объектов содержит наземные измерительные пункты, принимающие сигналы от навигационных спутников и передающие по соответствующему каналу связи навигационные параметры в центр обработки. В центре обработки осуществляются прием навигационных параметров, вычисление и накопление массива базовых навигационных параметров, их архивация и выдача навигационных параметров по запросу потребителя. Система содержит также N, где N≥1, периферийных пунктов обработки, соединенных через канал связи общего доступа с центром обработки. Каждый периферийный пункт обработки служит для преобразования информации из базового массива в требуемые конкретному потребителю навигационные параметры в заданном формате и для формирования информационно-логического протокола их передачи по запросу потребителя. К каждому периферийному пункту обработки через соответствующие узкополосные каналы связи подключено М, где М≥1, комплектов аппаратуры потребителей.
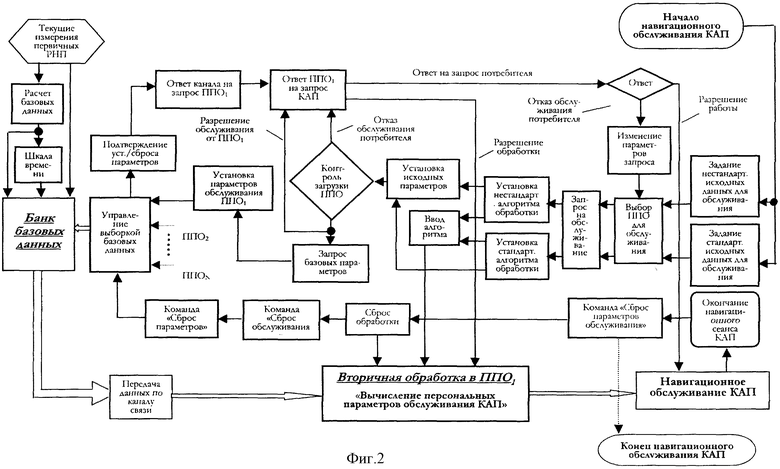
На фиг. 1 представлена функциональная схема спутниковой радионавигационной системы определения местоположения объектов, где показано:
1 - наземные измерительные пункты;
2 - каналы связи;
3 - центр обработки;
4 - канал связи общего доступа;
5 - N, где N≥1, периферийных пунктов обработки;
6 - узкополосные каналы связи;
7 - М, где М≥1, комплектов аппаратуры потребителей.
На фиг. 2 представлен алгоритм навигационного обслуживания, поясняющий функционирование системы в соответствии с изобретением.
Возможность осуществления изобретения подтверждается нижеследующим описанием работы спутниковой радионавигационной системы определения местоположения объекта. Навигационные сигналы, излучаемые соответствующими навигационными спутниками (не показаны), принимаются соответствующими наземными измерительными пунктами (НИП) 1. Вся доступная навигационная информация содержится в первичных радионавигационных параметрах, а именно в измерениях квазидальности, псевдофазы и частоты несущей сигналов спутников, а также в навигационных параметрах, полученных на основе их обработки. Этой информации достаточно для решения любой навигационной задачи. Под наземными измерительными пунктами 1 подразумеваются также контрольно-корректирующие станции (ККС) в центре локальной рабочей зоны и базовые станции (БС) в точках координации.
Для создания поля первичных радионавигационных параметров (РПН) все доступные НИП 1 связаны каналами связи 2 с центром обработки 3. В центре обработки 3 осуществляются прием навигационных параметров, вычисление и накопление массива базовых навигационных параметров и их архивация, т.е. по известным алгоритмам выполняется предварительная обработка первичных РНП (расчет дифференциальных поправок для каждого спутника, определение местоположения точек координации, мониторинг работы СРНС и т.д.). С целью повышения достоверности предварительной обработки, ее результаты могут быть сопоставлены с аналогичной информацией, полученной непосредственно на одном или нескольких НИП 1. В центре обработки 3 выделяют также ионосферные и тропосферные компоненты погрешности СРНС, чтобы обеспечить максимальную точность коррекции погрешностей в соответствующем(их) из М комплекте(ах) 7 аппаратуры потребителя.
Таким образом, в центре обработки 3 на основе первичных РНП определяется, по крайней мере, следующий базовый набор параметров:
- дифференциальные поправки с включенными погрешностями распространения, координаты точек координации объектов;
- ионосферные и тропосферные задержки распространения сигналов спутников по имеющимся НИП, ККС и БС;
- данные текущего мониторинга.
Совместно с первичными РНП и привязкой всех данных ко времени (например, UTC), перечисленные параметры образуют базовый массив корректирующей информации, которая архивируется в центре обработки 3 до момента использования.
Основной задачей предлагаемой системы является адаптация базовых исходных навигационных параметров под требования каждого конечного потребителя и доставка ему этих навигационных параметров. Ключевые проблемы здесь состоят в следующем.
Процедура навигационного обеспечения потребителя в самой общей формулировке предусматривает решение произвольно выбранной навигационной задачи на имеющемся у потребителя типе КАП 7. Для этого требуется обеспечить КАП 7 исходными навигационными параметрами в нужном формате и в нужной временной последовательности. Под КАП 7 в данном изобретении понимается как навигационная аппаратура потребителя, так и аппаратура пост-обработки навигационной информации, а также аппаратура для других навигационных определений потребителя, например, аппаратура для сбора статистических данных по ионосферным погрешностям и т.д. При работе в единой системе неограниченного числа разнородных потребителей возникает проблема с передачей навигационных параметров: требования к пропускной способности канала связи оказываются чрезмерно высокими, что делает его реализацию экономически неоправданной, а построение единой навигационной системы - невозможным.
С другой стороны, любой известный метод навигационных определений требует исходную информацию ограниченного объема. Расчеты показывают, что при навигационных определениях с частотой 1 Гц в среднем для потребителя достаточно передать 1,0...1,4 Кбод информации. Такой трафик обеспечивает практически любой служебный узкополосный канал связи, в том числе канал связи с мобильным объектом (например, диспетчерской службы управления наземным транспортом или управления воздушным движением и т.д.). Однако для использования такого канала в системе необходимо преобразовать информацию из базового массива (полученную выше в центре обработки 3) в навигационные параметры, нужные конкретному пользователю, причем в строго определенном формате, и, кроме того, дополнительно сформировать информационно-логический протокол их передачи. В предлагаемой системе эти функции выполняют соответствующие из N периферийные пункты обработки (ППО) 5. Логика работы ППО 5 заключается в следующем.
Каждый ППО 5 обслуживает строго определенный круг конечных пользователей, объединенных по функциональному, территориальному или любому иному принципу. Например, это могут быть геодезические пользователи, имеющие общую точку координации (т.е. общую БС), воздушные суда, находящиеся в зоне действия одной локальной ККС, пользователи, работающие в режиме постобработки, и т.п. По запросу от КАП 7 (например, одного или нескольких из М) на основании априорной информации (вид проводимых пользователем навигационных определений, тип используемого им КАП 7, его грубое местоположение и т.д.) ППО 5 настраивает весь тракт приема-передачи с центром обработки 3 на выдачу потребителю готовой информации из перечня имеющейся в центре обработки 3 и(или) "сырых" навигационных параметров. В последнем случае обработка этих навигационных параметров проводится непосредственно на ППО 5. Алгоритм обработки может быть выбран из числа известных для решения типовых задач или априорно установлен пользователем путем персонального запроса. Структурная схема самого ППО 5 определяется характеристиками обслуживаемой группы конечных пользователей и требуемой для этого вычислительной мощности: в общем случае она может содержать несколько промежуточных уровней обработки. После установления связи с центром обработки 3 каждый ППО 5 в реальном масштабе времени получает от центра обработки 3 заказанную базовую информацию и далее адаптирует ее к виду, указанному в запросе обслуживаемого потребителя. После этого из ППО 5 информация по узкополосному каналу связи 6 передается на соответствующий КАП 7 конечного пользователя. В случае необходимости, например, при выходе пользователя (мобильного объекта) из зоны действия одного узкополосного канала связи 6 его навигационное обслуживание может быть передано другому ППО 5 и другому узкополосному каналу связи 6.
Реализация функций центра обработки 3 и периферийных пунктов обработки 5 может быть осуществлена, например, на базе стандартных ЭВМ, объединенных в локальную сеть (см., например, К. Айден и др. "Аппаратные средства PC", издание 2, BHV - Санкт-Петербург, 1998 г., гл. 16.).
В предлагаемой системе к каналам связи предъявляются следующие требования. Канал передачи 2 измерений от каждого НИП 1 в центр обработки 3 может быть односторонним с пропускной способностью около 6 Кбод. Блок передаваемой информации при 20 видимых спутниках GPS и ГЛОНАСС максимально будет содержать:
- псевдодальности [20кдх2сл.х32р=1280 (бит/с)],
- псевдофазы [20кдх2сл.х32р=1280 (бит/с)],
- дифференциальные поправки [20кАх2сл.х32р=1280 (бит/с)] или координаты базовой станции [4х2сл.х32р.=256 (бит/с)],
- поправки распространения [20кдх2сл.х32р=1280 (бит/с)],
- временную привязку к шкале времени GPS и ГЛОНАСС [4сл.х32р.=128 (бит/с)],
т. е. с общим объемом информации не более 5248 (бит/с). Такой поток данных могут обеспечить, например, телефонные каналы связи, каналы радиосвязи и т.д.
К каналу связи общего доступа 4 центра обработки 3 с ППО 5 предъявляются наиболее серьезные требования. Канал должен обеспечивать двухстороннюю связь, доступность в произвольной точке большого региона (в том числе в удаленных его областях, например, в районах Крайнего Севера), легкость подключения, не иметь ограничений на число одновременно обслуживаемых абонентов, возможность выбора (программирования) получаемой информации и пропускную способность не хуже 6 Кбод для каждого абонента. Перечисленным требованиям в полной мере удовлетворяет существующая глобальная информационная сеть "Internet". Подключение к ней через спутниковые каналы связи с трафиком ~1 (Мбит/сек) позволяет вообще снять ограничение на пропускную способность и использовать в системе единственный периферийный пункт обработки.
К узкополосным каналам связи 6 ППО 5 с КАПами 7 предъявляется только одно требование: обеспечить передачу дополнительных 1,0...1,5 (Кбод) информации. Этому требованию соответствует практически любой канал связи, например, телефонный канал связи, канал проводной связи, канал радиосвязи и т.д. Как правило, мобильные объекты оснащаются многоканальными системами связи с независимыми подканалами. Поэтому целесообразно под передачу дополнительных навигационных параметров выделить один из свободных подканалов.
Описанная выше работа предлагаемой системы поясняется также алгоритмом навигационного обслуживания потребителя в системе, возможный вариант которого представлен на фиг.2, где отражены также некоторые служебные команды, позволяющие более четко представить работу рассматриваемой системы.
Для специалистов в указанной области и других областей при ознакомлении с настоящим описанием будут ясны другие возможные модификации данного изобретения. Такие модификации могут включать другие известные по предшествующему уровню техники признаки. Описанный выше вариант системы не исчерпывает все их многообразие, которое можно осуществить в соответствии с нижеследующей формулой изобретения, которая составлена без ограничительной части, т.к. она в таком виде более четко отражает сущность изобретения.
Изобретение относится к радиотехнике, в частности к радионавигационным системам определения местоположения объектов. Спутниковая радионавигационная система определения местоположения объектов содержит наземные измерительные пункты, принимающие навигационные сигналы от навигационных спутников и передающие по соответствующему каналу связи навигационные параметры в центр обработки N, где N≥1, соединенных через канал связи общего доступа с центром обработки периферийных пунктов обработки, к каждому из которых через соответствующие узкополосные каналы связи подключено М, где М≥1, комплектов навигационной аппаратуры потребителей. Достигаемым техническим результатом является адаптация базовых исходных радионавигационных параметров под требования каждого конечного потребителя. 2 ил.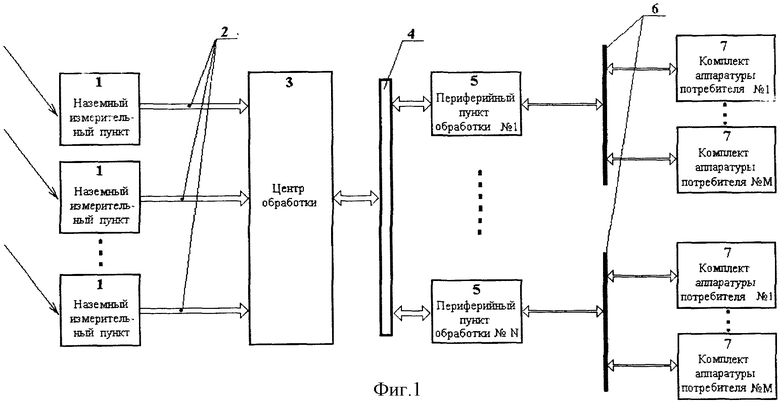
Спутниковая радионавигационная система определения местоположения объектов, содержащая наземные измерительные пункты, принимающие радионавигационные сигналы от навигационных спутников, определяющие по ним первичные радионавигационные параметры, а именно квазидальность, псевдофазу и частоты несущей сигналов спутников, а также навигационные параметры, полученные на основе их обработки, и передающие эти навигационные параметры по соответствующему каналу связи в центр обработки, где осуществляется прием навигационных параметров, их сопоставление, определение на их основе массива базовых навигационных параметров в виде дифференциальных поправок с включенными погрешностями распространения сигналов, координат точек координации объектов, ионосферных и тропосферных погрешностей распространения сигналов, данных текущего мониторинга и первичных радионавигационных параметров, их накопление, архивация и выдача по запросу потребителя, отличающаяся тем, что введены N периферийных пунктов обработки, где N≥1, соединенных через канал двусторонней связи общего доступа, выполненный с возможностью выбора получаемой информации для конкретного потребителя, с центром обработки и служащих каждый для преобразования информации из базового массива навигационных параметров на основании априорной информации от потребителя в требуемые конкретному потребителю навигационные параметры в заданном формате и для формирования информационно-логического протокола их передачи по запросу потребителя, причем к каждому периферийному пункту обработки через соответствующие узкополосные каналы связи подключено М, где М≥1, комплектов аппаратуры потребителя.
| Международная космическая радиотехническая система обнаружения терпящих бедствие/Под ред | |||
| B.C | |||
| ШЕБШАЕВИЧА | |||
| - М.: Радио и связь, 1987, с | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| СИСТЕМА ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ С САНКЦИОНИРОВАННЫМ ДОСТУПОМ В РЕЖИМЕ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 2000 |
|
RU2161317C1 |
| Способ контроля качества уборкиКОРНЕКлубНЕплОдОВ | 1979 |
|
SU837341A1 |
| Способ получения 2-гуанидинилиденовых производных 3-метилтиазолидина в виде их аддитивных солей с кислотами | 1980 |
|
SU978728A3 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

