Изобретение относится к области радионавигации и, в частности, к комплексным дальномерным радиотехническим системам (ДРТС) ближней навигации (БН) и предназначено, в первую очередь, для навигации летательных аппаратов (ЛА), а также может использоваться для навигации морского и сухопутного транспорта.
Современное развитие авиации ставит перед радионавигацией задачу высокоточного определения местоположения ЛА в сложных условиях быстроменяющейся воздушной и наземной обстановки.
Получившие широкое распространение радиосредства ближней навигации, такие как международная дальномерная радиотехническая система DME [1, 2, 3, 4], обеспечивают решение только части задачи, т.е. определение местоположения ЛА относительно стационарных наземных приемоответчиков (радиомаяков), координаты которых заранее известны на борту ЛА.
При этом для определения координат местоположения ЛА необходимо измерение расстояния до двух и более наземных радиомаяков, координаты которых заранее известны на борту ЛА, и требуется обеспечение связи с этими радиомаяками, т.е. несколько радиомаяков всегда должны находиться в зоне радиовидимости ЛА, что порой является затруднительным, учитывая дециметровый диапазон рабочих частот находящейся в эксплуатации дальномерной радиотехнической системы DME (960…1215 МГц). Такими же недостатками обладает и дальномерный канал отечественной радиотехнической системы ближней навигации РСБН (936…1000,5 МГц) [5].
Кроме того, в дальномерной радиотехнической системе на точность определения местоположения ЛА оказывает значительное влияние геометрический фактор взаимного расположения ЛА и наземных радиомаяков.
Требуемая для ЛА точность местоопределения может быть получена при использовании данных сети глобальной спутниковой радионавигационной системы (СРНС) и использовании дифференциальных поправок СРНС от наземных локальных контрольно-корректирующих станций (ЛККС). Однако определенные факторы, влияющие на целостность и непрерывность получения информации СРНС [6], не позволяют использовать эту систему в качестве единственного средства радионавигации, что, в свою очередь, не позволяет снять с повестки дня актуальность применения и совершенствования дальномерных радиотехнических систем ближней навигации, находящихся в эксплуатации. Примером такого подхода является запатентованная в США система DME с функцией широковещания [7] и система навигации, связи и обзора на основе DME [8].
Имеется ряд патентов-аналогов, в которых отражены отдельные устройства и связи общие с предлагаемой ДРТС.
Так, например, в патентах [9-12] по данным GPS в бортовую цифровую вычислительную машину (БЦВМ) вводятся навигационные параметры местоположения ЛА, которые по виду соответствуют выходным данным существующих бортовых средств радионавигации, таких как VOR, DME, TACAN и NDB (ненаправленные радиомаяки). При этом используются идентификаторы этих систем и их местоположение.
В [13] предлагается бортовая навигационная аппаратура, которая принимает данные от спутниковой системы GNSS (или GPS), преобразует эти данные в сигналы VOR и передает их традиционному приемнику VOR, после чего выдает потребителю.
Авторы [14] предлагают локальную навигационную систему, включающую три базовых наземных станции и одну ведущую наземную станцию, расположенные в непосредственной близости друг от друга в известных местах. Эти станции получают сигналы от определенного созвездия GPS, при этом ведущая станция по беспроводной связи собирает от ведомых станций принятые ими псевдодальности по сигналам GPS и на основании этих данных вырабатывает корректирующие дифференциальные поправки для данной местности, которые может передавать потребителям.
В [15] считается, что возможности системы DME в большинстве случаев применения используются в небольшой степени, и поэтому в эту систему можно интегрировать дополнительные функции в части передачи данных, наблюдения и комплексной навигации. При этом предметом патентования является использование 3-х объектов, оборудованных DME, в число которых входят ЛА, центральная наземная станция и, по меньшей мере, одна дополнительная наземная станция, расположенная на определенном удалении от центральной станции и связанная с последней каналом связи. На основе запросных и ответных дальномерных сигналов между всеми тремя объектами определяется наклонная дальность, высота и азимут ЛА относительно центральной станции, причем высота и азимут определяются на земле и передаются на ЛА.
В [16, 17] предлагаются система и метод определения пространственного местоположения ЛА независимо на борту и на земле на любых этапах "от взлета до посадки" ("gate-to-gate"). Предложения по этим патентам основаны на дополнительном размещении как минимум четырех наземных станций наблюдения, среди которых одна ведущая, а остальные ведомые станции. На бортах ЛА, действующих в данном районе, и на всех наземных станциях этого района устанавливается идентичная аппаратура наблюдения, с помощью которой автоматически ведется наблюдение воздушной обстановки данного района всеми ЛА и всеми наземными станциями.
В [18] решается задача повышения точности определения параметров пространственного положения ЛА на основе данных спутниковой и инерциальной навигационных систем и приведения этих данных, а также вычисленных точных координат траектории летательного аппарата к единому высокоточному времени.
Рассмотренные системы-аналоги [9-17] используют данные СРНС либо для повышения качества собственной информации, либо для обеспечения встроенного контроля и имеют общие недостатки:
1. необходимость использования нескольких наземных радиомаяков (приемоответчиков) для определения местоположения на борту данного ЛА;
2. необходимость предварительного наличия на борту ЛА данных об абсолютных координатах приемоответчиков, что увеличивает время предполетной подготовки или требует ввода данных непосредственно в процессе полета вручную;
3. невозможность индикации координат местоположения ЛА на ответчике, что не позволяет включить эти ответчики в общую систему наблюдения за воздушной обстановкой, в том числе, на командно-диспетчерском пункте, что существенно повысило бы безопасность полетов;
4. невозможность определения на данном ЛА относительных координат других ЛА, взаимодействующих с теми же ответчиками, что также не позволяет для повышения безопасности полетов использовать вышеуказанные системы для наблюдения воздушной обстановки на борту ЛА.
В качестве прототипа изобретения принята дальномерная радиотехническая система ближней навигации (дальномерный канал РСБН) [19].
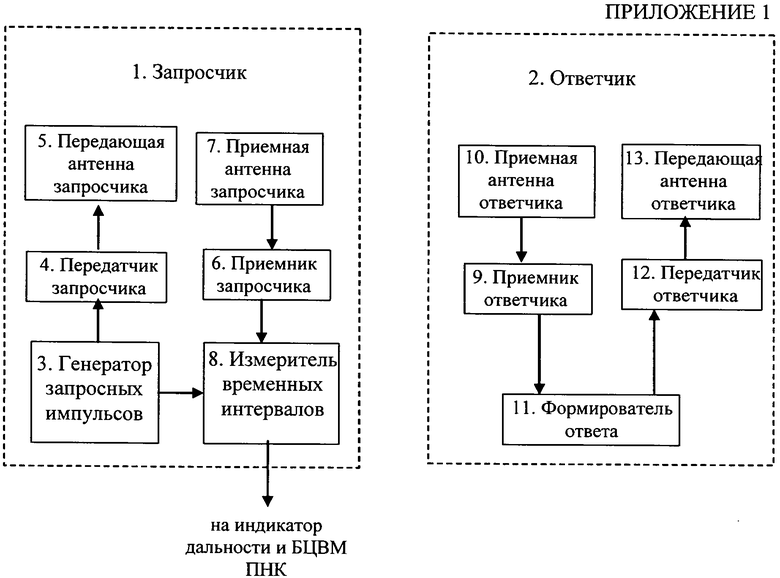
Система-прототип [19] состоит (см. Приложение 1) из запросчика 1 и ответчика 2, при этом запросчик 1 содержит генератор запросных импульсов 3, передатчик запросчика 4 с передающей антенной запросчика 5 на выходе и приемник запросчика 6 с приемной антенной запросчика 7 на входе, выход которого подключен к первому входу измерителя временных интервалов 8, второй вход которого соединен с первым выходом генератора запросных импульсов 3, второй выход которого соединен с входом передатчика 4, при этом выход измерителя временных интервалов 8 подключен к входам индикатора дальности и БЦВМ пилотажно-навигационного комплекса (ПНК), а ответчик 2 содержит приемник ответчика 9 с приемной антенной ответчика 10 на входе, формирователь ответа 11 и передатчик ответчика 12 с передающей антенной ответчика 13 на выходе, при этом выход приемника ответчика 9 подключен к входу формирователя ответа 11, а выход формирователя ответа 11 подключен к входу передатчика ответчика 12.
При относительной простоте аппаратного построения бортового и наземного оборудования данная дальномерная радиотехническая система-прототип обладает рядом общих для вышеприведенных систем-аналогов недостатков, а кроме того:
- размещение наземного ответчика требует геодезической привязки к местности;
- геодезическая привязка наземного ответчика (дальномерного радиомаяка - ДРМ) применима для ДРМ в стационарном исполнении и весьма затруднительна для ДРМ в мобильном исполнении;
- в базу данных БЦВМ ПНК заранее должны быть занесены координаты и частотные каналы наземных ответчиков, которые будут использоваться в полете;
- для определения положения ЛА на местности дальномерным методом необходимо его обязательное нахождение в зоне радиовидимости двух или более наземных ответчиков;
- точность местоопределения ЛА по ответчикам зависит от геометрического фактора;
- для определения местоположения необходим определенный ресурс частотного диапазона ΔF, равный N-кратному ресурсу, необходимому для работы по одному наземному ответчику.
Основной задачей заявляемого изобретения, решение которой позволит устранить упомянутые недостатки прототипа, является:
Определение с высокой точностью местоположения ЛА, оснащенного бортовым запросчиком, при взаимодействии только с одним наземным ответчиком (мобильным или стационарным) с сокращением времени и трудоемкости предполетной подготовки ЛА и необходимого используемого частотного диапазона для определения местоположения ЛА.
Поставленная задача решается следующим образом.
Предложенная ДРТС БН (в дальнейшем ДРТС) состоит из запросчика и ответчика, при этом запросчик содержит генератор запросных импульсов, передатчик запросчика с передающей антенной запросчика на выходе и приемник запросчика с приемной антенной запросчика на входе, выход которого подключен к первому входу измерителя временных интервалов, второй вход которого соединен с первым выходом генератора запросных импульсов, второй выход которого соединен с входом передатчика, при этом выход измерителя временных интервалов подключен к входам индикатора дальности и БЦВМ пилотажно-навигационного комплекса (ПНК). Ответчик содержит приемник ответчика с приемной антенной ответчика на входе, формирователь ответа и передатчик ответчика с передающей антенной ответчика на выходе, выход приемника ответчика подключен к входу формирователя ответа, при этом дополнительно введены в состав запросчика спутниковый приемоизмеритель запросчика с антенной на первом входе, дешифратор координатной информации ответчика и устройство обработки координатной информации, а в состав ответчика включены спутниковый приемоизмеритель ответчика с антенной на входе, шифратор координатной информации ответчика и устройство коммутации, при этом выход приемника запросчика одновременно подключен к входу дешифратора координатной информации ответчика, первый выход которого подключен к второму входу спутникового приемоизмерителя запросчика, второй выход упомянутого дешифратора подключен к входу данных о координатах ответчика в БЦВМ ПНК и первому входу устройства обработки координатной информации, второй вход которого подключен к выходу спутникового приемоизмерителя запросчика, при этом выход упомянутого устройства обработки подключен к входу данных об относительных координатах ЛА в БЦВМ ПНК, а в ответчике выход формирователя ответа соединен с первым входом устройства коммутации, второй и третий входы которого соединены, соответственно, с первым и вторым выходами шифратора координатной информации ответчика, вход которого соединен с выходом спутникового приемоизмерителя ответчика, а выход устройства коммутации соединен с входом передатчика ответчика.
Предложены варианты системы, дополнительно повышающие безопасность полетов путем отображения воздушной обстановки.
Для наблюдения воздушной обстановки на ответчике в ДРТС дополнительно в запросчик введены шифратор координатной информации запросчика и схема ИЛИ, а в ответчик введены дешифратор координатной информации запросчика и индикатор кругового обзора (ИКО), при этом выход устройства обработки координатной информации соединен с входом шифратора координатной информации запросчика, выход которого соединен с входом схемы ИЛИ, а второй выход генератора запросных импульсов соединен с входом передатчика запросчика через другой вход и выход схемы ИЛИ, при этом вход дешифратора координатной информации запросчика подключен к выходу приемника ответчика, а выход к входу индикатора кругового обзора.
Дальнейшее развитие ДРТС предложено в варианте, с повышенной надежностью, где в запросчике дополнительно устройство обработки координатной информации выполнено как устройство комплексной обработки координатной информации ответчика, СРНС и ПНК с третьим и четвертым дополнительными входами, подключенными к выходам БЦВМ ПНК и измерителя временных интервалов соответственно, а в ответчик дополнительно введены блок усреднения и памяти и схема ИЛИ, при этом вход блока усреднения и памяти соединен с выходом спутникового приемоизмерителя ответчика, одновременно соединенного через вход-выход схемы ИЛИ с входом шифратора координатной информации ответчика, при этом другой вход схемы ИЛИ соединен с выходом блока усреднения и памяти.
Повышение помехоустойчивости предлагается в варианте ДРТС, где в запросчик дополнительно введены устройство синхронизации сигналов запросчика и блок выбора интервалов, а шифратор координатной информации запросчика и дешифратор координатной информации ответчика выполнены с возможностью синхронизации и имеют дополнительно второй вход и третий выход соответственно, при этом в спутниковых приемоизмерителях запросчика и ответчика задействованы синхронизирующие выходы. В ответчике дополнительно введен формирователь сигналов синхронизации ответчика, при этом дешифратор координатной информации запросчика и шифратор координатной информации ответчика выполнены с возможностью синхронизации и имеют дополнительные входы, а дешифратор координатной информации запросчика имеет также дополнительный выход. В запросчике первый вход устройства синхронизации сигналов запросчика соединен с синхронизирующим выходом спутникового приемоизмерителя запросчика, второй вход с третьим выходом дешифратора координатной информации ответчика, а выход соединен с входом блока выбора интервалов, выход которого соединен с вторым входом шифратора координатной информации запросчика, а в ответчике первый вход формирователя сигналов синхронизации ответчика соединен с синхронизирующим выходом спутникового приемоизмерителя ответчика, при этом первый выход упомянутого формирователя подключен к дополнительному входу шифратора координатной информации ответчика, а второй выход соединен с дополнительным входом дешифратора координатной информации запросчика, дополнительный выход которого соединен со вторым входом формирователя сигналов синхронизации ответчика.
Предложен вариант ДРТС с возможностью наблюдения воздушной обстановки на борту ЛА.
В этом варианте ДРТС в запросчик дополнительно введены приемник наблюдения с антенной на входе, а дешифратор координатной информации ответчика и устройство обработки координатной информации выполнены с возможностью декодирования и обработки информации запросчиков других ЛА, при этом дешифратор координатной информации ответчика выполнен с дополнительным входом, который соединен с выходом приемника наблюдения.
Работа дальномерной радиотехнической системы поясняется с помощью фиг.1, 2, 3, 4 и 5.
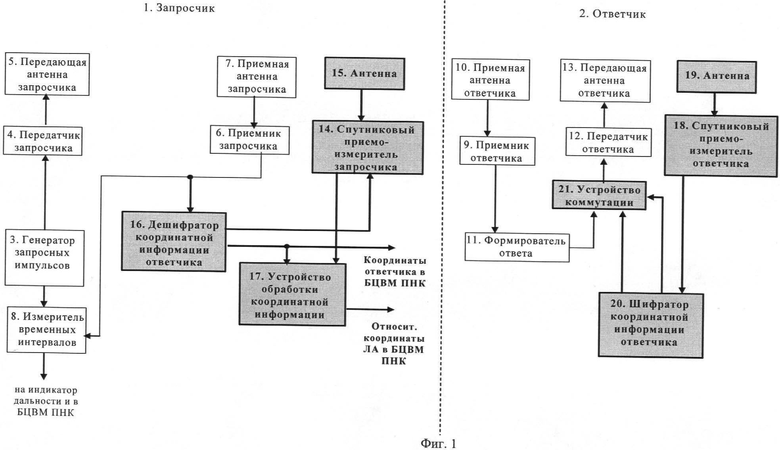
На фиг.1 представлена структурная схема ДРТС для определения с высокой точностью относительного местоположения ЛА, оснащенных бортовым запросчиком, при взаимодействии только с одним ответчиком с сокращением времени и трудоемкости предполетной подготовки ЛА и необходимого частотного диапазона.
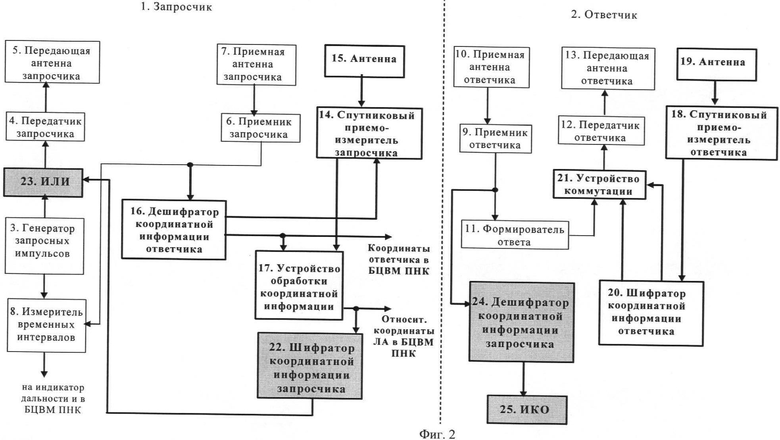
На фиг.2 представлена структурная схема ДРТС с обеспечением наблюдения воздушной обстановки на наземном ответчике - дальномерном радиомаяке (ДРМ).
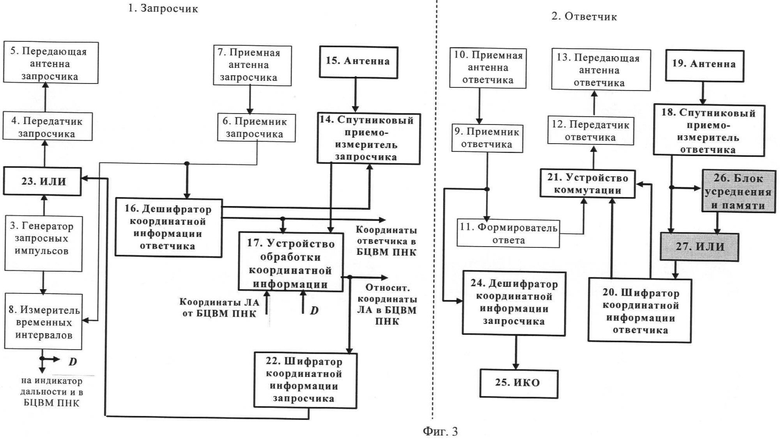
На фиг.3 представлена структурная схема ДРТС повышенной надежности с использованием усредненных (запомненных) данных при пропадании информации СРНС на наземном ответчике или на бортовом запросчике.
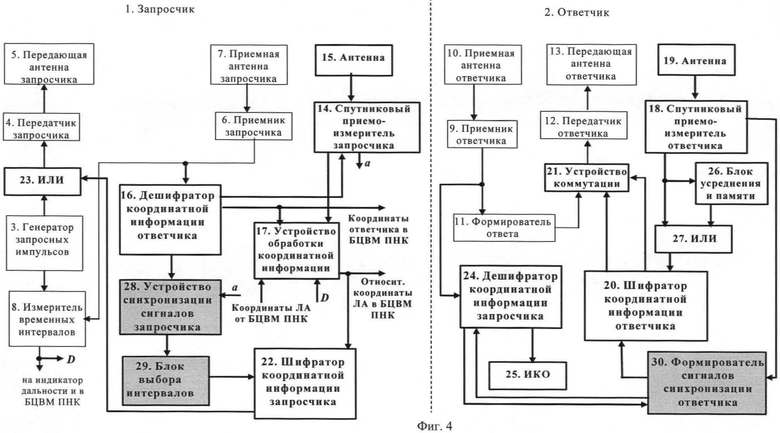
На фиг.4 представлена структурная схема ДРТС с исключением влияния внутрисистемных помех при информационном обмене взаимодействующих объектов.
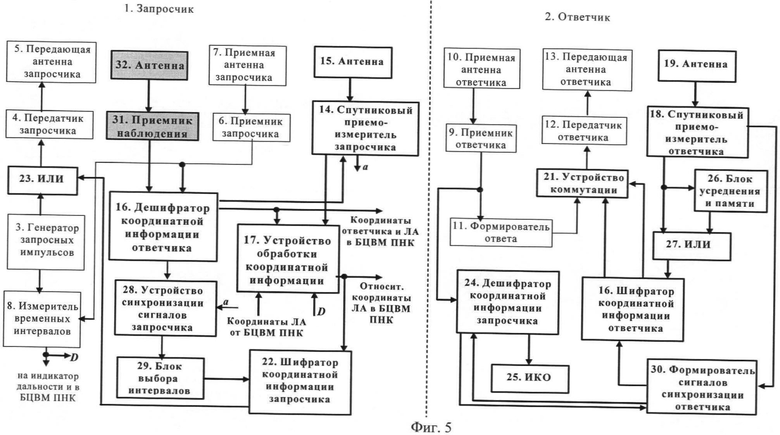
На фиг.5 представлена структурная схема ДРТС с обеспечением наблюдения воздушной обстановки на борту ЛА.
ДРТС, представленная на фиг.1, состоит из запросчика 1 и ответчика 2, при этом запросчик 1 содержит генератор запросных импульсов 3, передатчик запросчика 4 с передающей антенной запросчика 5 на выходе и приемник запросчика 6 с приемной антенной запросчика 7 на входе, выход которого подключен к первому входу измерителя временных интервалов 8, второй вход которого соединен с первым выходом генератора запросных импульсов 3, второй выход которого соединен с входом передатчика 4, при этом выход измерителя временных интервалов 8 подключен к входам индикатора дальности и БЦВМ ПНК, а ответчик 2 содержит приемник ответчика 9 с приемной антенной ответчика 10 на входе, формирователь ответа 11 и передатчик ответчика 12 с передающей антенной ответчика 13 на выходе, при этом выход приемника ответчика 9 подключен к входу формирователя ответа 11 и дополнительно введены в состав запросчика 1 спутниковый приемоизмеритель запросчика 14 с антенной 15 на первом входе, дешифратор координатной информации ответчика 16 и устройство обработки координатной информации 17, а в состав ответчика 2 введены спутниковый приемоизмеритель ответчика 18 с антенной 19 на входе, шифратор координатной информации ответчика 20 и устройство коммутации 21, при этом выход приемника запросчика 6 одновременно подключен к входу дешифратора координатной информации ответчика 16, первый выход которого подключен к второму входу спутникового приемоизмерителя запросчика 14, второй выход упомянутого дешифратора 16 подключен к входу данных о координатах ответчика в БЦВМ ПНК и первому входу устройства обработки координатной информации 17, второй вход которого подключен к выходу спутникового приемоизмерителя запросчика 14, при этом выход упомянутого устройства обработки 17 подключен к входу данных об относительных координатах ЛА в БЦВМ ПНК, а в ответчике 2 выход формирователя ответа 11 соединен с первым входом устройства коммутации 21, второй и третий входы которого соединены, соответственно, с первым и вторым выходами шифратора координатной информации ответчика 20, вход которого соединен с выходом спутникового приемоизмерителя ответчика 18, а выход устройства коммутации 21 соединен с входом передатчика ответчика 12.
ДРТС, представленная на фиг.2, состоит из ДРТС на фиг.1 и дополнительно введенных в запросчик 1 шифратора координатной информации запросчика 22 и схемы ИЛИ 23, а в ответчик 2 дешифратора координатной информации запросчика 24 и индикатора кругового обзора 25, при этом выход устройства обработки координатной информации 17 соединен с входом шифратора координатной информации запросчика 22, выход которого соединен с входом схемы ИЛИ 23, а второй выход генератора запросных импульсов 3 соединен с входом передатчика запросчика 4 через другой вход и выход схемы ИЛИ 23, при этом вход дешифратора координатной информации запросчика 24 подключен к выходу приемника ответчика 9, а выход к входу индикатора кругового обзора 25.
ДРТС, приведенная на фиг.3, состоит из ДРТС на фиг.2, при этом в запросчике 1 устройство обработки координатной информации 17 выполнено как устройство комплексной обработки координатной информации ответчика, СРНС и ПНК с третьим и четвертым дополнительными входами, подключенными к выходам БЦВМ ПНК и измерителя временных интервалов 8 соответственно, а в ответчик 2 дополнительно введены блок усреднения и памяти 26 и схема ИЛИ 27, при этом вход блока усреднения и памяти 26 соединен с выходом спутникового приемоизмерителя ответчика 18, одновременно соединенного через вход-выход схемы ИЛИ 27 со входом шифратора координатной информации ответчика 20, при этом другой вход схемы ИЛИ 27 соединен с выходом блока усреднения и памяти 26.
ДРТС, представленная на фиг.4, состоит из ДРТС на фиг.3, при этом в запросчик 1 дополнительно введены устройство синхронизации сигналов запросчика 28 и блок выбора интервалов 29, а шифратор координатной информации запросчика 22 и дешифратор координатной информации ответчика 16 выполнены с возможностью синхронизации и имеют дополнительно второй вход и третий выход соответственно, при этом в спутниковых приемоизмерителях запросчика 14 и ответчика 18 задействованы синхронизирующие выходы, а в ответчике 2 дополнительно введен формирователь сигналов синхронизации ответчика 30, при этом дешифратор координатной информации запросчика 24 и шифратор координатной информации ответчика 20 выполнены с возможностью синхронизации и имеют по дополнительному входу, а дешифратор координатной информации запросчика 24 имеет также и дополнительный выход, при этом в запросчике 1 первый вход устройства синхронизации сигналов запросчика 28 соединен с синхронизирующим выходом спутникового приемоизмерителя запросчика 14, второй вход с третьим выходом дешифратора координатной информации ответчика 16, а выход соединен с входом блока выбора интервалов 29, выход которого соединен с вторым входом шифратора координатной информации запросчика 22, а в ответчике 2 первый вход формирователя сигналов синхронизации ответчика 30 соединен с синхронизирующим выходом спутникового приемоизмерителя ответчика 18, первый выход упомянутого формирователя 30 подключен к дополнительному входу шифратора координатной информации ответчика 20, а второй выход соединен с дополнительным входом дешифратора координатной информации запросчика 24, дополнительный выход которого соединен со вторым входом формирователя сигналов синхронизации ответчика 30.
ДРТС, представленная на фиг.5, состоит из ДРТС на фиг.4, при этом в запросчик 1 дополнительно введены приемник наблюдения 31 с антенной 32 на входе, а дешифратор координатной информации ответчика 16 и устройство обработки координатной информации 17 выполнены с возможностью декодирования и обработки информации запросчиков других ЛА, при этом введен дополнительный вход дешифратора координатной информации ответчика 16, который соединен с выходом приемника наблюдения 31.
В ДРТС на фиг.1-5 блоки 3-13 (тонкие линии) выполнены и работают аналогично системе-прототипу.
В системе-прототипе (см. приложение 1) определение местоположения ЛА осуществляется путем измерения дальности до двух-трех наземных ответчиков методом «запрос-ответ», при этом координаты наземных ответчиков заранее известны на борту ЛА. Такие измерения позволяют ЛА-запросчикам определять собственные абсолютные координаты для местоопределения в горизонтальной плоскости.
Предложенные ДРТС (фиг.1-5) обеспечивают местоопределение ЛА при работе с одним наземным ответчиком, благодаря введению блоков 14-21 (жирные линии).
Согласно фиг.1 ДРТС работает следующим образом.
На запросчике 1 со второго выхода генератора запросных импульсов 3 кодированные запросные сигналы поступают на вход передатчика запросчика 4, где они модулируются и всенаправленно излучаются передающей антенной запросчика 5.
На ответчике 2 запросные сигналы через приемную антенну ответчика 10 принимаются приемником ответчика 9, с выхода которого поступают на вход формирователя ответа 11, где они декодируются, задерживаются на величину начальной задержки τ0, кодируются и поступают в виде ответных сигналов на первый вход устройства коммутации 21, с выхода которого ответные сигналы поступают на вход передатчика ответчика 12 и всенаправленно излучаются передающей антенной ответчика 13.
На бортовом запросчике 1 принятые через приемную антенну запросчика 7 приемником запросчика 6 ответные сигналы поступают на первый вход измерителя временных интервалов 8, на второй вход которого поступают запускающие импульсы запроса с первого выхода генератора запросных импульсов 3. В измерителе временных интервалов 8 декодируются ответные сигналы и измеряется временной интервал τизм между запросным (запускающим) и ответным импульсами (за вычетом величины постоянной задержки τ0), пропорциональный дальности Dизм между запросчиком 1 и ответчиком 2.
Кроме ответных сигналов, в ответчике 2 формируется информация о координатах его местоположения. Значения координат местоположения ответчика 2 и информация о составе рабочего созвездия с выхода спутникового приемоизмерителя 18 поступают на вход шифратора координатной информации ответчика 20, где они кодируются и с заданным интервалом времени с первого выхода поступают на второй вход устройства коммутации 21, на третий вход которого поступает сигнал переключения входов с первого на второй. Этот сигнал формируется в шифраторе координатной информации ответчика 20 на время, необходимое для передачи координатной информации ответчика. С выхода устройства коммутации 21 координатная информация поступает на вход передатчика ответчика 12, где модулируется и всенаправленно излучается через антенну 13.
Принятая через приемную антенну запросчика 7 координатная информация и информация о составе рабочего созвездия с выхода приемника запросчика 6 поступает на вход дешифратора координатной информации ответчика 16, с первого выхода которого информация о составе рабочего созвездия поступает на второй вход спутникового приемоизмерителя 14 для принудительной установки оптимального состава своего рабочего созвездия, а со второго его выхода декодированная информация о координатах ответчика поступает на вход БЦВМ ПНК для записи в базу данных о координатах местоположения ответчика. Кроме того, эта информация поступает на первый вход устройства обработки координатной информации 17, на второй вход которого поступает информация о координатах ЛА от спутникового приемоизмерителя 14, входящего в состав запросчика 1. В устройстве обработки координатной информации 17 с высокой точностью местоопределения формируется информация о координатах запросчика 1 относительно ответчика 2. Эта информация с выхода устройства обработки координатной информации 17 передается в БЦВМ ПНК, где используется для решения различных задач навигации, в том числе для привода в заданную точку и захода на посадку.
Работа ДРТС на фиг.2 поясняется следующим образом.
В структурной схеме, приведенной на фиг.2, сохранены все устройства и связи, приведенные на фиг.1, пояснение к работе которых приведены выше. Ниже приведено пояснение работы вновь введенных блоков.
Высокоточная информация о координатах запросчика 1 относительно ответчика 2 (относительные координаты запросчика), поступающая с выхода устройства обработки координатной информации 17 в БЦВМ ПНК, поступает также на вход шифратора координатной информации запросчика 22, кодируется им и через схему ИЛИ 23 поступает на вход передатчика запросчика 4 вместе с запросными сигналами, модулируется и всенаправленно излучается через передающую антенну запросчика 5 с заданным периодом повторения информации.
Информация о координатах запросчика (ЛА), поступающая через приемную антенну ответчика 10 на вход приемника ответчика 9, принимается, детектируется и поступает на вход формирователя ответа 11 и вход дешифратора координатной информации запросчика 24. В формирователе ответа 11 селектируются и подвергаются дальнейшей обработке только запросные сигналы, а в дешифраторе координатной информации запросчика 24 селектируется, обрабатывается и поступает на выход только информация о координатах запросчика (ЛА). Эта информация поступает на вход индикатора кругового обзора 25 для наблюдения воздушной обстановки оператором радиомаяка-ответчика, мобильного или стационарного, или диспетчером командно-диспетчерского пункта, что дает дополнительную возможность управления воздушным движением в зоне действия ответчика предлагаемой системы ДРТС.
Работа ДРТС на фиг.3 происходит следующим образом. Часть структуры, подобная ДРТС на фиг.2 работает аналогичным образом. Вновь введенные блоки позволяют дополнительно выполнять следующие операции.
Информация о координатах ответчика с выхода спутникового приемоизмерителя ответчика 18 поступает на первый вход схемы ИЛИ 27, на другой вход которой поступает с определенным периодом Тц (например, один раз в 6 с) усредненная и запомненная информация о координатах ответчика по данным СРНС. Эта информация поступает с выхода блока усреднения и памяти 26 с периодом Тц во время паузы между поступлением информации непосредственно с выхода спутникового приемоизмерителя ответчика 18. Суммарная информация о координатах ответчика 2 (значения, полученные в данный момент времени, и редкие с периодом Тц усредненные и запомненные значения) с выхода схемы ИЛИ 27 поступает на вход шифратора координатной информации ответчика 20 и далее через устройство коммутации 21 и передатчик ответчика 12 всенаправленно излучается передающей антенной ответчика 13. Информация, поступающая от ответчика 2, поступает на запросчик 1 через приемную антенну запросчика 7 и приемник запросчика 6. При пропадании по каким-либо причинам информации с выхода спутникового приемоизмерителя ответчика 18 информация о координатах ответчика 2 с периодом Тц будет продолжать поступать на запросчик 1, что обеспечивает помехозащищенность и целостность системы и повышает надежность системы.
В свою очередь, при пропадании информации с выхода спутникового приемоизмерителя запросчика 14 на бортовом запросчике 1 в предлагаемой системе используются координаты ЛА, счисленные по данным автономных (инерциальные системы) и других источников информации путем подключения соответствующего выхода БЦВМ ПНК к третьему входу устройства обработки координатной информации 17, четвертый вход которого подключен к выходу измерителя временных интервалов 8. Использование данных измеренной дальности до наземного ответчика (Dизм) позволяет повысить помехозащищенность и достоверность полученной высокоточной информации об относительных координатах местоположения запросчика (ЛА), поступающей с выхода устройства обработки координатной информации 17 и передаваемой в БЦВМ ПНК.
ДРТС на фиг.4 по сравнению с ДРТС на фиг.3 выполняет следующие дополнительные операции.
Устройство синхронизации сигналов запросчика 28 и формирователь сигналов синхронизации ответчика 30 предназначены для разделения времени передачи информации путем формирования интервальной временной сетки с периодом Тц, состоящей из n интервалов информационного обмена и синхронизированной секундной меткой времени СРНС. Цикл обновления временной сетки Тц равен
Тц=nτио,
где n - число интервалов информационного обмена в Тц; τио - длительность интервала информационного обмена. Каждый интервал информационного обмена состоит из l интервалов синхронизации, каждый из которых состоит, в свою очередь, из k рабочих интервалов длительностью τp:
τио=lTc; Tc=kτp.
В опытном образце ДРТС величина τио принималась равной 10 с, интервал синхронизации Тс=1 с, а рабочий интервал передачи информации одним абонентом τр будет равен 40 мс. В этом случае интервал информационного обмена состоит из 250 рабочих интервалов. Синхронизация секундной меткой времени обеспечивает упорядоченную циклограмму работы в части приема и передачи информации о координатах ответчика и всех запросчиков, находящихся в зоне действия ответчика.
Синхронизация работы ДРТС происходит следующим образом.
Формирователь сигналов синхронизации ответчика 30, засинхронизированный по входу синхронизации секундной меткой времени, поступающей с синхронизирующего выхода спутникового приемоизмерителя ответчика 18, формирует сигналы синхронизации ответчика 2 с периодом Тц. Эти сигналы с выхода формирователя сигналов синхронизации ответчика 30 поступают на дополнительный вход шифратора координатной информации ответчика 20. Поступившая на вход шифратора координатной информации ответчика 20 информация СРНС по сигналу синхронизации поступает через устройство коммутации 21 на вход передатчика ответчика 12 и всенаправленно излучается передающей антенной ответчика 13. Сигнал переключения входов, поступающий на третий вход устройства коммутации 21, формируется шифратором координатной информации ответчика 20 с моментом поступления на его дополнительный вход сигнала синхронизации и снимается с окончанием первого рабочего интервала, в котором передается информация о координатах ответчика 2 и сигнал синхронизации временной сети с периодом Тц.
Таким образом, информация о координатах местоположения ответчика 2 формируется синхронно с секундной меткой времени с интервалом, равным Тц, и передается всем взаимодействующим в рабочей зоне ответчика 2 запросчикам 1. Временные сетки этих запросчиков 1, в свою очередь, синхронизируются секундными метками времени, поступающими с синхронизирующего выхода спутникового приемоизмерителя запросчика 14 на первый вход устройства синхронизации сигналов запросчика 28, на второй вход которого поступает сигнал синхронизации временной сети с периодом Тц, выработанный на третьем выходе дешифратора координатной информации ответчика 16 из информационной посылки ответчика 2. Эта информационная посылка, всенаправленно излученная передающей антенной ответчика 13, принимается приемной антенной запросчика 7 и через приемник запросчика 6 поступает на вход дешифратора координатной информации ответчика 16.
Устройство синхронизации сигналов запросчика 28, получившее по первому входу секундные метки времени со спутникового приемоизмерителя запросчика 14, по второму входу сигналы синхронизации с периодом Тц, поступающие с третьего выхода дешифратора координатной информации ответчика 16, формирует синхронно с ответчиком временную сетку с периодом Тц.
Синхронизированная временная сетка, состоящая из n рабочих интервалов, в виде соответствующей импульсной последовательности с выхода устройства синхронизации сигналов запросчика 28 поступает на вход блока выбора интервалов 29, где по определенному алгоритму выбирается рабочий интервал передачи информационной посылки запросчиком 1. Информация о выбранном рабочем интервале с выхода блока выбора интервалов 29 поступает на второй вход шифратора координатной информации запросчика 22, на первый вход которого поступает высокоточная информация об относительных координатах запросчика 1 (ЛА). С выхода шифратора координатной информации запросчика 22 сформированная информационная посылка, имеющая в своем составе информацию о координатах ЛА и другую информацию, в том числе, информацию о номере ЛА, через схему ИЛИ 23 поступает на передатчик запросчика 4 и всенаправленно излучается передающей антенной запросчика 5.
В изложенной выше системе синхронизации информационные посылки каждого запросчика 1 излучаются в своем выбранном интервале. При этом возможны случаи выбора одного и того же рабочего интервала различными запросчиками 1.
В этом случае на ответчике 2 при формировании информационной посылки передается информация о конфликтном рабочем интервале, что требует от запросчиков 1 поменять рабочий интервал. Декодированная рекомендация с третьего выхода дешифратора координатной информации ответчика 16 в составе информации о синхронизированной временной сетке, формируемой в устройстве синхронизации сигналов запросчика 28, поступает с его выхода на вход блока выбора интервалов 29, что принуждает выбрать новый временной рабочий интервал на данных конфликтующих запросчиках 1.
Выявление конфликтного рабочего интервала происходит в дешифраторе координатной информации запросчика 24, поступившей на его вход с выхода приемника ответчика 9. Номер конфликтного интервала определяется связью дополнительного выхода формирователя сигналов синхронизации ответчика 30 с дополнительным входом дешифратора координатной информации запросчика 24. Эта связь обеспечивает поступление информации о временной сетке синхронизации, в которой работают все взаимодействующие объекты и, соответственно, о номерах рабочих интервалов, в которых поступает информация. Поток информации о наличии временной сетки, поступающий на вход дешифратора координатной информации запросчика 24, позволяет оценить наличие занятых и конфликтных рабочих интервалов. Эта информация с дополнительного выхода дешифратора координатной информации запросчика 24 поступает на второй вход формирователя сигналов синхронизации ответчика 30, с первого выхода которого поступает на дополнительный вход шифратора координатной информации ответчика 20, где соответствующим образом кодируется и совместно с информацией о координатах ответчика 2 через устройство коммутации 21 поступает на вход передатчика ответчика 12 и всенаправленно излучается передающей антенной 13.
Информация о координатах ответчика 2 совместно с синхросигналом и информацией о занятых и конфликтных рабочих интервалах принимается приемником запросчика 6, подключенным к выходу всенаправленной приемной антенны запросчика 7. С выхода приемника запросчика 6 эта информация поступает на вход дешифратора координатной информации ответчика 16, со второго выхода которого информация о координатах ответчика 2 поступает на первый вход устройства обработки координатной информации 17, а с третьего выхода дешифратора координатной информации ответчика 16 информация о занятых и конфликтных рабочих интервалах совместно с синхросигналом ответчика 2 поступает на второй вход устройства синхронизации сигналов запросчика 28. Информация о занятых и конфликтных рабочих интервалах в составе информации о синхронизированной временной сетке с выхода устройства синхронизации сигналов запросчика 28 поступает на вход блока выбора интервалов 29, в котором соответствующим образом, по определенному алгоритму с учетом полученной информации, производится выбор рабочего интервала данного запросчика 1.
Следует отметить, что система синхронизации передачи информационных посылок ответчиком 2 и всеми запросчиками 1 позволяет упорядочить этот обмен и практически исключить влияние внутрисистемных помех при передаче достаточно продолжительных по времени посылок информации. Однако при этом асинхронный принцип обмена запросными и, соответственно, ответными сигналами в канале измерения дальности сохранен аналогично прототипу, а повышение помехозащищенности за счет исключения влияния внутрисистемных помех относится только к каналу информационного обмена. Существует возможность упорядочить и этот обмен, однако, учитывая необходимость обеспечения преемственности работы ответчика 2 как с находящимися в эксплуатации запросчиками-прототипами, так и с запросчиками 1, оборудованными предлагаемой системой, а также учитывая, что запросные сигналы являются, в сущности, двухимпульсной посылкой малой длительности, передаваемой с очень большой скважностью (более 100), синхронизация этого канала в предлагаемой системе представляется нецелесообразной.
ДРТС на фиг.5 обладает возможностью наблюдения воздушной обстановки, включая все ЛА, находящиеся в области радиовидимости и содержащие идентичные по структуре запросчики.
Дополнительный приемник наблюдения 31 введен в состав запросчика 1 предлагаемой системы ДРТС для приема информационных сообщений всех запросчиков (ЛА), взаимодействующих с данным ответчиком 2, с целью обеспечения наблюдения общей воздушной обстановки данного района. Приемник наблюдения 31 настраивается на частоту запросных сигналов запросчика 1.
Вход приемника наблюдения 31 подключен к приемной антенне наблюдения 32, а его выход соединен с дополнительным входом дешифратора координатной информации ответчика 16, со второго выхода которого принятые и декодированные информационные сообщения о местоположении ответчика 2 и взаимодействующих с ним запросчиков 1 поступают на первый вход устройства обработки координатной информации 17, на второй и третий входы которого поступает информация СРНС, ПНК и измеренной до ответчика дальности, соответственно. На выходе устройства обработки координатной информации 17 формируется информация не только об относительном положении данного запросчика и ответчика, но и информация об относительном положении всех запросчиков 1, взаимодействующих с данным ответчиком 2. При этом относительные координаты могут быть определены как относительно ответчика 2, так и относительно любого запросчика 1. Вся полученная информация поступает в БЦВМ ПНК, при этом относительные координаты взаимодействующих объектов поступают с выхода устройства обработки координатной информации 17, а абсолютные координаты ответчика 2 и запросчиков 1 поступают в БЦВМ ПНК со второго выхода дешифратора координатной информации ответчика 16.
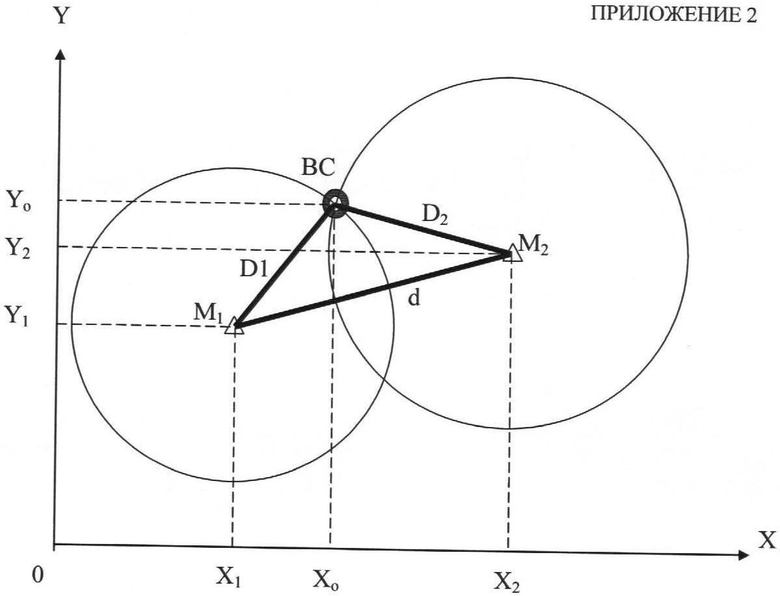
Поясним подробнее некоторые моменты работы, общие для ДРТС на фиг.1-5. Для системы-прототипа (см. приложение 1) с координатами двух наземных приемоответчиков X1, Y1 и Х2, Y2 и значениями дальности до наземных приемоответчиков D1 и D2 (приложение 2) абсолютные координаты ЛА-запросчика Х0 и Y0 могут быть определены решением очевидной системы уравнений

Решение системы может быть получено в следующем виде [21]:

где d - расстояние между наземными ответчиками.
Эта процедура выполняется бортовой цифровой вычислительной машиной (БЦВМ ПНК). Полученные координаты местоположения (Х0, Y0) используются для обеспечения полета ЛА по заданному маршруту.
Для осуществления этой цели и служит система-прототип, позволяющая произвести измерение дальности (Di) до двух, трех или более радиомаяков-ответчиков (Mi), координаты которых заранее, при предполетной подготовке ЛА, заносятся в базу данных БЦВМ. В полете возможен оперативный ввод данных вручную.
В отличие от прототипа предлагаемая система позволяет определять местоположение ЛА на борту при взаимодействии только с одним модернизированным ответчиком - дальномерным радиомаяком (ДРМ), координаты которого заранее не известны и, соответственно, не находятся в базе данных БЦВМ.
Измерение дальности на данном ЛА, взаимодействующем с ответчиком, производится так же, как и в системе-прототипе. При этом местоположение ЛА определяется окружностью, радиусом которой является измеренное до ЛА расстояние, а координаты центра, т.е. местоположение ответчиков, заранее не известно.
Для определения координат ответчика служит приемоизмеритель СРНС, введенный в состав наземного модернизированного ответчика. Координаты ответчика, полученные по данным СРНС, кодируются соответствующим (например, интервально-временным) кодом и с периодом Тц передаются передатчиком ответчика. Период поступления информации может изменяться в зависимости от необходимости примерно в пределах от нескольких десятков секунд до нескольких минут.
Эта информация принимается на борту ЛА, взаимодействующего с ответчиком, декодируется и поступает в бортовое устройство обработки и определения координат, на другой вход которого поступает информация о местоположении ЛА, полученная с выхода приемоизмерителя СРНС, введенного в состав бортового запросчика предлагаемой системы.
В устройстве обработки и определения координат производится вычисление координат ЛА относительно местоположения наземного ответчика.
В основе вычисления координат ЛА используется метод относительной навигации по СРНС [22]. Поэтому высокая точность местоопределения ЛА в данном случае сравнима с точностью местоопределения с использованием дифференциальных поправок СРНС, получаемых от наземных контрольно-корректирующих станций.
Это обстоятельство можно пояснить следующими соображениями.
Анализ составляющих погрешности навигационных параметров СРНС позволяет сделать вывод, что погрешность определения абсолютных координат содержит случайную составляющую, независимую у разных объектов, и коррелированную составляющую, практически одинаковую у взаимодействующих объектов (при условии совпадения рабочих созвездий) [22].
Дисперсия ошибок определения координат СРНС может быть записана в виде:

где q - одна из абсолютных (геоцентрических) координат;  - суммарная дисперсия случайных составляющих погрешности;
- суммарная дисперсия случайных составляющих погрешности;  - суммарная дисперсия коррелированных составляющих.
- суммарная дисперсия коррелированных составляющих.
При получении данных об абсолютных координатах радиомаяка-ответчика на борту ЛА определяются относительные координаты, то есть координаты ЛА относительно местоположения ответчика

где qн - абсолютные координаты ответчика; qo - абсолютные координаты ЛА.
Если определение абсолютных координат на запросчике и ответчике произведено по одному и тому же рабочему созвездию, то коррелированные составляющие погрешностей будут скомпенсированы. При равноточном определении координат дисперсия погрешностей относительной координаты будет равна

то есть практически будет совпадать с дисперсией определения координат в дифференциальном режиме:
 .
.
Необходимо отметить, что при этом не потребовалось использование локальных контрольно-корректирующих станций.
Условия видимости навигационных спутников на ответчике (ДРМ) и на запросчике (борту ЛА) различны. Совпадение рабочих созвездий, по которым определяется местоположение на ответчике и на борту ЛА, может быть обеспечено передачей состава своего рабочего созвездия ответчиком вместе с измеренными абсолютными координатами.
Для реализации режима относительной навигации при определении координат ЛА относительно ответчика последний должен передавать свои измеренные абсолютные координаты с привязкой к единому времени. В то же время для определения координат ЛА по измеренным дальностям до двух или трех ответчиков необходимы точные координаты ответчиков (полученные геодезическими методами или усреднением данных СРНС). По этой причине каждый наземный ответчик должен передавать оба комплекта собственных координат. При этом точные координаты (постоянные во времени) могут передаваться достаточно редко (например, один раз за несколько десятков секунд до нескольких минут). Признаком передачи точных координат может быть, например, специфический код в составе информации о рабочем созвездии. В остальное время ответчик будет передавать измеренные абсолютные координаты с указанием состава рабочего созвездия, по которому получены данные координаты, и привязкой к единому времени.
Принятая на борту запросчика информация о рабочем созвездии поступает в приемоизмеритель СРНС запросчика для принудительной установки оптимального состава своего рабочего созвездия.
Значение измеренной дальности до ответчика из устройства измерения дальности поступает также в устройство обработки координатной информации и в данном случае используется для исключения задержки момента обновления информации СРНС, оценки, контроля и комплексной обработки результатов вычислений. В результате будут получены данные местоположения ЛА с точностью, близкой к точности местоопределения ЛА по данным СРНС, работающей в дифференциальном режиме. При пропадании по каким-либо причинам данных СРНС предлагаемая система продолжает работать в обычном дальномерном режиме, например в режиме дальность-дальность. При этом точные координаты наземных ответчиков (ДРМ), полученные по данным СРНС и запомненные, продолжают передаваться с прежним периодом всем ЛА, находящимся в зоне действия этих ответчиков. Координаты ответчика в этом случае имеют определенный признак, чем и отличаются от текущих координат СРНС, получаемых при работоспособном канале спутниковой радионавигации.
Данные об относительных координатах текущего местоположения ЛА поступают в БЦВМ пилотажно-навигационного комплекса, а также кодируются соответствующим кодом и асинхронно с периодом 5…10 с или другим, в зависимости от необходимости, или по запросу, поступившему от наземного ответчика (ДРМ), излучаются через антенну передатчиком бортового запросчика. Информация о местоположении ЛА наряду с запросными сигналами принимается наземным приемником ответчика, декодируется и поступает на индикатор кругового обзора, на котором отображается местоположение всех ЛА, взаимодействующих с данным радиомаяком.
Синхронизация всех информационных сообщений, передаваемых и принимаемых в предлагаемой дальномерной радиотехнической системе ближней навигации, осуществляется по сигналам единого времени, передаваемым в составе спутниковой информации и выдаваемым в импульсном виде на отдельном выходе приемоизмерителя СРНС. Наземный ответчик всенаправленно передает всем ЛА свою метку времени, предваряя передачу информации, что позволяет всем ЛА уточнить свою шкалу времени с учетом поправок на распространение радиоволн, вычисляемым по измеренной наклонной дальности относительно данного наземного ответчика.
Для исключения влияния внутрисистемных помех при информационном обмене предлагаемая ДРТС обеспечивает сочетание асинхронного метода измерения наклонной дальности до наземного ответчика и синхронного метода передачи информационных сообщений при многостанционном доступе с временным разделением (МДВР) [23]. При этом каждый ЛА после формирования у себя временной сетки на основе общей циклограммы информационного обмена, задаваемой наземным приемоответчиком, выбирает по определенному алгоритму интервал для передачи своих информационных сообщений.
Таким образом, предлагаемая система обеспечивает создание единого локально-глобального навигационного поля с использованием преимуществ каждой системы (СРНС, ДРТС) и, соответственно, исключением недостатков, присущих каждой системе в отдельности.
Предложенная совокупность признаков в виде новых блоков и структурных связей обладает существенной новизной и неизвестна из современных источников информации.
Выполнение блоков системы производилось на традиционных цифровых микросхемах и БИС, формирование синхронизирующих свойств проводилось известными методами [23].
В системе получена возможность повышения точности местоопределения, не требующая использования ЛККС, а также повышения целостности и непрерывности получения информации о собственном местоположении на борту ЛА.
В системе могут быть использованы как стационарные, так и мобильные радиомаяки-ответчики.
Мобильные радиомаяки-ответчики могут быть использованы для получения и формирования на борту ЛА информации, обеспечивающей, в том числе, заход на посадку на необорудованные аэродромы.
Принципы, заложенные в построение предлагаемой ДРТС, использованы в режиме определения взаимных координат (ОВК) аппаратуры РСБН-85 В, прошедшей летную оценку на самолетах СУ-34. Работоспособность режима ОВК и его точностные характеристики подтверждены Актом 2-го этапа ГСИ объекта.
Список литературы
1. Сосновский А.А., Хаимович И.А. Радиоэлектронное оборудование летательных аппаратов, М.: Транспорт, 1987.
2. Авиационная радионавигация: Справочник. / А.А.Сосновский, И.А.Хаймович, Э.А.Лутин, И.Б.Максимов; Под. ред. А.А.Сосновского. - М.: Транспорт.1990. - 264 с.
3. Трояновский А.Д., Клуга A.M., Цилькер Б.Я. Бортовое оборудование радиосистем ближней навигации, М.: Транспорт, 1990. - 182 с.
4. Международные стандарты и Рекомендуемая практика, Приложение 10 к Конвенции о международной гражданской авиации, Авиационная электросвязь, Том 1 Радионавигационные средства, Издание шестое, июль 2006 г.
5. ГОСТ Р 50715-94. Система радиотехническая ближней навигации.
6. Яценков B.C. Основы спутниковой навигации. Системы GPS NAVSTAR и ГЛОНАСС. - М.: Горячая линия - Телеком, 2005. - 272 с.
7. Patent US 6366233, 02.04.2002 г.
8. Patent US 4918610, 17.04.1990 г.
9. Patent US 6901331, 31.05.2005 г.
10. Patent US 6606559, 12.08.2003 г.
11. Patent US 6163753, 19.12.2000 г.
12. Patent US 5997995, 28.09.1999 г.
13. Patent US 5801659, 01.09.1998 г.
14. Patent US 2000119638, 24.06.2004 г.
15. Patent US 4918610, 17.04.1990 г.
16. Patent US 6529820, 04.03.2003 г.
17. Patent US 20020147542, 10.10.2002 г.
18. Патент РФ 2116666, заявлен 27.07.1998 г.
19. Радиотехнические системы: учебник для студ. высш. учеб. заведений / [Ю.М.Казаринов и др.]; под ред. Ю.М.Казаринова. - М.: Издательский центр "Академия", 2008. - 592 с., прототип - стр.433, 434, рис.10.6.
20. Robert J.Kelly and Danny R.Cusick. Distance Measuring Equipment and Its Evolving Role in Aviation. Bendix Communications Division Allied Bendix Aerospace Corporation Towson, Maryland 21204, Advances in Electronics and Electron Physics, vol.68, 1986, p.1-243.
21. Принципы построения локально-глобальной многоабонентной системы относительной навигации / Герчиков А.Г., Громов Г.Н., Наливайко Д.А., Орлов В.К., Чернявский А.Г. - ВРЭ. Сер. ОВР, вып.21, 1990, с.3-12.
22. Сетевые спутниковые радионавигационные системы / Под ред. П.П.Дмитриева и B.C.Шебшаевича. М.: Радио и связь, 1982.
23. Многостанционный доступ в локальной радиотехнической системе информационного обмена и наблюдения / В.И.Бабуров, А.Г.Герчиков, Д.А.Наливайко, В.К.Орлов, А.Г.Чернявский // Транспорт: наука, техника, управление. 2001, №12.
ПРИЛОЖЕНИЕ 3
Перечень обозначений на фиг.1-5
1 - запросчик
2 - ответчик
3 - генератор запросных импульсов
4 - передатчик запросчика
5 - передающая антенна запросчика
6 - приемник запросчика
7 - приемная антенна запросчика
8 - измеритель временных интервалов
9 - приемник ответчика
10 - приемная антенна ответчика
11 - формирователь ответа
12 - передатчик ответчика
13 - передающая антенна ответчика
14 - спутниковый приемоизмеритель запросчика
15 - антенна
16 - дешифратор координатной информации ответчика
17 - устройство обработки координатной информации
18 - спутниковый приемоизмеритель ответчика
19 - антенна
20 - шифратор координатной информации ответчика
21 - устройство коммутации
22 - шифратор координатной информации запросчика
23 - схема ИЛИ
24 - дешифратор координатной информации запросчика
25 - ИКО
26 - блок усреднения и памяти
27 - схема ИЛИ
28 - устройство синхронизации сигналов запросчика
29 - блок выбора интервалов
30 - формирователь сигналов синхронизации ответчика
31 - приемник наблюдения
32 - антенна
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ | 1990 |
|
RU1753837C |
| СИСТЕМА ОПОЗНАВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2254596C2 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2584689C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2783257C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018855C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННО-ПИЛОТАЖНОЙ ИНФОРМАЦИИ ДЛЯ СУДОВ И ОТВЕТЧИК | 1993 |
|
RU2075763C1 |
| Ретранслятор дальномера посадочной радиомаячной группы с каналом передачи данных | 2022 |
|
RU2786058C1 |
| Ретранслятор дальномера посадочной радиомаячной группы | 2021 |
|
RU2776028C1 |
Изобретение относится к области радионавигации и, в частности, к комплексным дальномерным радиотехническим системам (ДРТС) ближней навигации (БН). ДРТС БН летательных аппаратов (ЛА) состоит из запросчика и ответчика. Запросчик содержит генератор запросных импульсов, передатчик запросчика с передающей антенной запросчика на выходе и приемник запросчика с приемной антенной запросчика на входе. Выход приемника запросчика подключен к первому входу измерителя временных интервалов, второй вход которого соединен с первым выходом генератора запросных импульсов, второй выход которого соединен с входом передатчика. Выход измерителя временных интервалов подключен к входам индикатора дальности и бортовой цифровой вычислительной машины (БЦВМ) пилотажно-навигационного комплекса (ПНК). Ответчик содержит приемник ответчика с приемной антенной ответчика на входе, формирователь ответа и передатчик ответчика с передающей антенной ответчика на выходе, выход приемника ответчика подключен к входу формирователя ответа. Дополнительно введены в состав запросчика спутниковый приемоизмеритель запросчика с антенной на первом входе, дешифратор координатной информации ответчика и устройство обработки координатной информации, а в состав ответчика введены спутниковый приемоизмеритель ответчика с антенной на входе, шифратор координатной информации ответчика и устройство коммутации. Выход приемника запросчика одновременно подключен к входу дешифратора координатной информации ответчика, первый выход которого подключен ко второму входу спутникового приемоизмерителя запросчика, второй выход упомянутого дешифратора подключен к входу данных о координатах ответчика в БЦВМ ПНК и первому входу устройства обработки координатной информации, второй вход которого подключен к выходу спутникового приемоизмерителя запросчика, при этом выход упомянутого устройства обработки подключен к входу данных об относительных координатах ЛА в БЦВМ ПНК. В ответчике выход формирователя ответа соединен с первым входом устройства коммутации, второй и третий входы которого соединены, соответственно, с первым и вторым выходами шифратора координатной информации ответчика, вход которого соединен с выходом спутникового приемоизмерителя ответчика, а выход устройства коммутации соединен с входом передатчика ответчика. Предложены варианты ДРТС, реализующие повышение безопасности полетов путем обеспечения наблюдения воздушной обстановки на запросчике и ответчике. Достигаемый технический результат - повышение точности определения местоположения ЛА. 4 з.п. ф-лы, 5 ил., 3 прил.
1. Дальномерная радиотехническая система (ДРТС) ближней навигации летательных аппаратов (ЛА), состоящая из запросчика и ответчика, при этом запросчик содержит генератор запросных импульсов, передатчик запросчика с передающей антенной запросчика на выходе и приемник запросчика с приемной антенной запросчика на входе, выход которого подключен к первому входу измерителя временных интервалов, второй вход которого соединен с первым выходом генератора запросных импульсов, второй выход которого соединен с входом передатчика запросчика, при этом выход измерителя временных интервалов подключен к входам индикатора дальности и бортовой цифровой вычислительной машины (БЦВМ) пилотажно-навигационного комплекса (ПНК), а ответчик содержит приемник ответчика с приемной антенной ответчика на входе, формирователь ответа и передатчик ответчика с передающей антенной ответчика на выходе, при этом выход приемника ответчика подключен к входу формирователя ответа, отличающаяся тем, что дополнительно введены в состав запросчика спутниковый приемоизмеритель запросчика с антенной на первом входе, дешифратор координатной информации ответчика и устройство обработки координатной информации, а в состав ответчика введены спутниковый приемоизмеритель ответчика с антенной на входе, шифратор координатной информации ответчика и устройство коммутации, при этом выход приемника запросчика одновременно подключен к входу дешифратора координатной информации ответчика, первый выход которого подключен ко второму входу спутникового приемоизмерителя запросчика, второй выход упомянутого дешифратора подключен к входу данных о координатах ответчика в БЦВМ ПНК и первому входу устройства обработки координатной информации, второй вход которого подключен к выходу спутникового приемоизмерителя запросчика, при этом выход упомянутого устройства обработки подключен к входу данных об относительных координатах ЛА в БЦВМ ПНК, а в ответчике выход формирователя ответа соединен с первым входом устройства коммутации, второй и третий входы которого соединены соответственно с первым и вторым выходами шифратора координатной информации ответчика, вход которого соединен с выходом спутникового приемоизмерителя ответчика, а выход устройства коммутации соединен с входом передатчика ответчика.
2. Дальномерная радиотехническая система ближней навигации по п.1, отличающаяся тем, что дополнительно введены в запросчик шифратор координатной информации запросчика и схема ИЛИ, а в ответчик дешифратор координатной информации запросчика и индикатор кругового обзора, при этом выход устройства обработки координатной информации соединен с входом шифратора координатной информации запросчика, выход которого соединен с входом схемы ИЛИ, а выход генератора запросных импульсов соединен с входом передатчика запросчика через другой вход и выход схемы ИЛИ, при этом вход дешифратора координатной информации запросчика подключен к выходу приемника ответчика, а выход - к входу индикатора кругового обзора.
3. Дальномерная радиотехническая система ближней навигации по п.2, отличающаяся тем, что в запросчике устройство обработки координатной информации выполнено как устройство комплексной обработки координатной информации ответчика, спутниковой радионавигационной системы и ПНК с третьим и четвертым дополнительными входами информации, подключенными к выходам БЦВМ ПНК и измерителя временных интервалов соответственно, а в ответчик дополнительно введены блок усреднения и памяти и схема ИЛИ, при этом вход блока усреднения и памяти соединен с выходом спутникового приемоизмерителя ответчика, одновременно соединенного через вход-выход схемы ИЛИ с входом шифратора координатной информации ответчика, при этом другой вход схемы ИЛИ соединен с выходом блока усреднения и памяти.
4. Дальномерная радиотехническая система ближней навигации по п.3, отличающаяся тем, что в запросчик дополнительно введены устройство синхронизации сигналов запросчика и блок выбора интервалов, а в ответчик дополнительно введен формирователь сигналов синхронизации ответчика, при этом в запросчике первый вход устройства синхронизации сигналов запросчика соединен с синхронизирующим выходом спутникового приемоизмерителя запросчика, второй вход - с третьим выходом дешифратора координатной информации ответчика, а выход соединен с входом блока выбора интервалов, выход которого соединен с вторым входом шифратора координатной информации запросчика, а в ответчике первый вход формирователя сигналов синхронизации ответчика соединен с синхронизирующим выходом спутникового приемоизмерителя ответчика, при этом первый выход упомянутого формирователя подключен к дополнительному входу шифратора координатной информации ответчика, а второй выход соединен с дополнительным входом дешифратора координатной информации запросчика, дополнительный выход которого соединен с вторым входом формирователя сигналов синхронизации ответчика.
5. Дальномерная радиотехническая система ближней навигации по п.4, отличающаяся тем, что в запросчик дополнительно введены приемник наблюдения с антенной на входе, а дешифратор координатной информации ответчика и устройство обработки координатной информации выполнены с возможностью декодирования и обработки информации запросчиков других ЛА, при этом введен дополнительный вход дешифратора координатной информации ответчика, который соединен с выходом приемника наблюдения.
| Радиотехнические системы: учебник для студентов высших учебных заведений./ Под ред | |||
| Ю.М | |||
| КАЗАРИНОВА | |||
| - М.: Издательский центр «Академия», 2008, с.433, 434, рис.10.6 | |||
| ДАЛЬНОМЕРНАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННЫМ ТРАЕКТОРИЯМ | 1990 |
|
RU2028005C1 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ | 1990 |
|
RU1753837C |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018855C1 |
| УНИВЕРСАЛЬНАЯ ВЫСОКОЭФФЕКТИВНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2007 |
|
RU2428714C2 |
| US 5311186 A, 10.05.1994 | |||
| СПОСОБ ПОЛУЧЕНИЯ N-ФТОРВИНИЛПРОИЗВОДНЫХКАРБАЗОЛА | 0 |
|
SU175967A1 |
| WO 2001071694 A1, 27.09.2001 | |||
| US 5870056 A, 09.02.1999. | |||

