Изобретение относится к радиоэлектронному вооружению кораблей, в частности к боевым информационно-управляющим системам и корабельным автоматизированным системам управления.
В настоящее время известен целый ряд вычислительных систем, боевых информационно-управляющих систем, информационно-управляющая система стрельбы подводной лодки и др.
Из зарубежных корабельных автоматизированных систем управления известны: английская TJOS, шведская TFGJ, голландская SINBAD и другие.
Перечисленные системы содержат в своем составе магистраль обмена, устройства памяти, периферийные устройства, пульты управления и устройство обработки данных, включающее процессоры, блок управления решением задач и группы линий сигналов (прерываний, запроса магистрали, тактирования, чтения/записи, блокировки).
В качестве прототипа настоящего предложения принята вычислительная система, описанная в авторском свидетельстве СССР N 615483 (см. SU 615483 (Антимиров В.М., Коробейщикова Т.В.), 19.06.78, G 06 F 15/16).
Недостаток прототипа заключается в том, что расширение функциональных возможностей обеспечивается лишь за счет избирательного запуска вычислительных процессов путем введения блока управления доступом и коммутатора. Однако при этом не обеспечивается повышение оперативности в принятии решений командиром, что обусловлено следующими причинами:
- отсутствие сформированной базы знаний, состоящей как из формализованных, так и неформализованных знаний;
- недостаточной глубиной анализа информации об обстановке;
- невозможностью оперативного отображения результатов анализа и рекомендованных системой прогнозных значений параметров.
Указанные факторы являются определяющими для эффективного использования вычислительной системы в качестве системы интеллектуальной поддержки командира корабля.
В прототипе указанные процессы не воспроизводятся. Кроме того, воспроизвести тактическую обстановку возможно лишь на основе игрового подхода, когда решения за противника принимаются в условиях неопределенности при ограниченном объеме текущей информации. Указанный недостаток прототипа становится особо значимым в настоящее время в связи с тем, что задача оценки обстановки и принятия решения требует наиболее трудоемкой и сложной обработки информации с подключением целого ряда специальных блоков и устройств.
Цель настоящего изобретения заключается в устранении указанного недостатка прототипа, то есть в создании системы интеллектуальной поддержки командира корабля, позволяющей оперативно выработать для него требуемые рекомендации на принятие решений с полным воспроизведением тактической обстановки.
Указанная цель достигается путем включения в вычислительную систему, содержащую (фиг. 1) магистраль обмена 1, устройства памяти 2.1,...2.M, периферийные устройства 3.1, . ..3.P и устройство обработки данных, включающее процессоры 4.1, . . . 4. N, модуль связи 5, шину управления 6, шину адресов/данных 7, регистр номера "главного процессора" 8, формирователь адресов процессоров 9, шины адресов процессоров 10.1,...,10.N, блок управления доступом 11, коммутатор 12 и группу линий 13 сигналов инициализации процессов, дополнительные блок отображения информации 14, блок знаний 15, блок анализа обстановки 16, блок корректуры решения 17 и блок программных событий 18.
Все блоки подключены соответствующим образом к модулю связи 5 и между собой. Обмен информацией между блоками предлагаемой системы интеллектуальной поддержки командира (СИПК) и подсистемами нижестоящего уровня иерархии управления осуществляется автоматически через общекорабельный модуль связи при формировании новых данных об обстановке или по инициативе СИПК.
Сущность изобретения поясняется чертежом, на котором представлена структурная схема СИПК. В ее состав входят:
- магистраль обмена 1, предназначенная для приема информации от общекорабельных процессоров, преобразования форматов сообщений и направления их через модуль связи 5 в другие блоки СИПК;
- устройства памяти 2.1,...2.M, представляющие собой типовые устройства для подключения к магистрали 1 и используемые для хранения долговременной информации, поступающей с верхнего уровня иерархии управления (перед выходом в море или в море по каналам связи) и от систем наблюдения и освещения обстановки корабля или рекомендаций от систем нижестоящего уровня иерархии управления, а также полученных в результате расчетов;
- периферийные устройства 3.1...3.P, представляющие собой типовые устройства для подключения к модулю связи 5 как объектов управления, так и отдельных источников информации корабля;
- процессоры 4.1...4.N, позволяющие объединять одноименные входы/выходы на шину управления 6 и на шине адресов/данных 7, представляющие собой типовые процессоры, используемые в ПЭВМ морского исполнения "Нева-МФ";
- модуль связи 5 с магистралью обмена 1 согласовывает по нагрузочной способности сигналы внутренних маломощных шин процессоров с сигналами магистрали 1;
- шина управления 6 служит для приема и передачи сигналов прерываний, тактирования, занятости, запроса магистрали и других управляющих сигналов;
- шина адресов/данных 7 служит для чтения и записи содержимого регистра 8 при инициализации процессоров 4, формирования с помощью блока 9 соответствующих адресов процессоров 4 по линиям 10.1...10.N;
- регистр номера "главного" процессора 8 обеспечивает чтение и запись со стороны шины 7 по сигналам шины управления 6 и выполнен в виде счетчика со сбросом и схемой добавления +1 по сигналам в группе линий 13 сигналов инициализации процессоров 4.1...4.N;
- формирователь 9 преобразовывает код в шине 7 таким образом, что при любом состоянии счетчика регистра 8 только в одной из шин 10.1...10.N оказывается код "главного" процессора, а при переключении счетчика "главным" становятся процессоры 4.1...4.N поочередно;
- шины адресов процессоров 10.1...10.N обеспечивают передачу в соответствующие процессоры 4 кодов адресов, сформированных блоком 9;
- блок управления 11 доступом к регистру инициализации обеспечивает чтение и запись со стороны шины 7 как при сигнале по линии выборки регистра 8 при инициализаци процессоров 4.1...4.N, так и в обычных циклах обмена при наличии управляющих сигналов в шине 6;
- коммутатор 12 обеспечивает арбитраж при захвате магистрали 1 процессорами 4.1...4.N по коду в шине 7 и организовывает последовательное распространение сигналов разрешения захвата магистрали от "главного" процессора к "неглавным" и, наконец, в линию связи для передачи через модуль связи 5 к периферийному устройству, выдавшему запрос на захват магистрали (для реализации обмена в режиме прямого доступа к памяти);
- группа линий сигналов 13 активизирует требуемые из разрядов в регистре 8 при выполнении программы обработки прерываний, при выборке страницы адресов периферийных устройств, при инициализации процессов и т.д.;
- блок отображения 14 обеспечивает прием от устройств памяти 2.1...2.M данных, преобразование их и отображение на типовом дисплее (данные о целях, навигационно-метеорологической обстановке, контролируемых и наблюдаемых параметрах своего движения, состоянии технических средств и систем управления оружием, текущим времени и дате), а также прием во внутреннюю память символьного и графического массива, вводимого оператором типовой клавиатуры для отображения его на экране видеомонитора (модуль МЗС ВНМ 17.01);
- блок знаний 15, состоящий из трех идентичных узлов в виде типовых вращающихся дисков и головок чтения/записи с единым механизмом привода головок и шпиндельным двигателем, располагаемым на оси вращения трех дискет. На первой дискете хранятся формализованные знания, содержащиеся в руководящих документах или получаемые в результате экспертного опроса командиров кораблей. На второй дискете хранятся так называемые неформализованные знания в виде программных модулей интеллектуальной поддержки. На третьей дискете хранится долговременная информация о силах и средствах (тактико-технические характеристики и данные оружия), а также информация, используемая для ведения вахтенного журнала при выполнении боевых эпизодов;
- блок анализа обстановки 16 обеспечивает преобразование данных, поступающих в СИПК от корабельных комплексов и систем к виду, удобному для анализ, поиска "эталонной" ситуации и классификации ситуации, сложившийся в системе "корабль-окружающая среда", и содержит типовой узел селекции включаемого эпизода, схему сравнения, три регистра хранения информации, блок управления индикацией, логическое устройство и группу вентилей;
- блок корректуры решения 17 предназначен для оперативного вмешательства командира в подготовленное решение на действия (ввода, отмены или корректуры рекомендованных к выдаче данных и команд). Он содержит унифицированную клавиатуру, обеспечивающую организацию информационного диалога по последовательному интерфейсу внешних устройств (например М-IC.АЦКС.03 АБЕИ. 467.17.002);
- блок программных событий 18 предназначен для организации использования системы при формировании команд управления на основе анализа и классификации обстановки, выработки рекомендаций на боевое и тактическое маневрирование, контроля их исполнения и содержит блок формирования программных модулей интеллектуальной поддержки, узел программного управления задачами, два регистра хранения информации и группу вентилей.
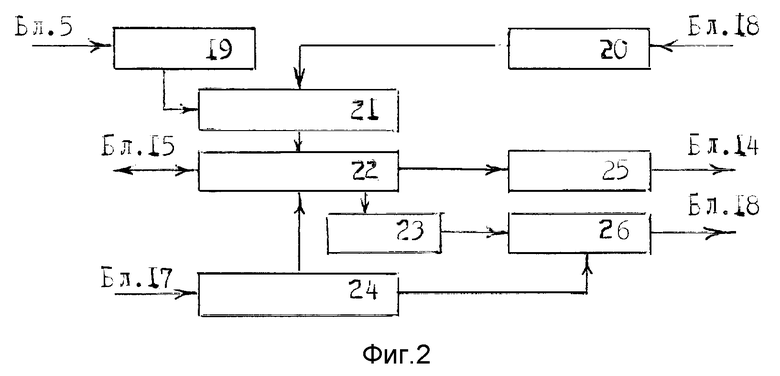
Схема блока 16 представлена на фиг. 2. На схеме обозначены:
19 - входной регистр;
20 - буферный регистр;
21 - схема сравнения;
22 - узел селекции включаемого эпизода;
23 - выходной регистр;
24 - логическое устройство управления;
25 - блок управления индикацией;
26 - группа вентилей.
При этом узел селекции включаемого эпизода 22 через схему сравнения 21 соединен с входным регистром 19 и буферным регистром состояния системы 20, а через выходной регистр 23 и группу вентилей 26 соединен с блоком программных событий 18. Кроме того, узел 22 по выходу соединен с блоком управления индикацией 25, а по входу - с логическим устройством управления 24, выход которого соединен со вторым входом группы вентилей 26.
Все элементы блока 16 являются типовыми устройствами вычислительной техники.
Блок 16 функционирует следующим образом.
В процессе функционирования СИПК в буферный регистр 20 поступает информация из блока 18 о текущем состоянии объекта и плане его действий. Схема сравнения 21 производит сравнение информации буферного регистра с информацией об обстановке, которая поступает на входной регистр 19. В случае, если имеется несоответствие намерений корабля сложившейся тактической обстановке или совпадении оперативного времени с заданным временем какого-либо события, выдается управляющий сигнал в узел селекции включаемого эпизода 22, который в соответствии с заданным набором логических правил производит выбор рекомендуемого эпизода для приведения системы "корабль-окружающая среда" в "нейтральное" положение. Рекомендации поступают в блок отображения 14 для анализа их командиром. Если командир согласен с выработанными рекомендациями на действия, то информация с выходного регистра 23 через группу вентилей 26 поступает на входной регистр 27 блока 18.
Схема блока 18 представлена на фиг. 3. На схеме обозначены:
27 - входной регистр;
28 - блок формирования программных модулей интеллектуальной поддержки;
29 - регистр рекомендаций на действия в эпизоде;
30 - группа вентилей;
31 - узел программного управления задачами.
При этом блок формирования программных модулей интеллектуальной поддержки 28 по первому входу соединен с входным регистром, а через последовательно соединенные узел программного управления задачами 31 и группу вентилей 30 - с первым выходом регистра рекомендаций на действия в эпизоде 29, второй вход которого соединен с выходом блока корректуры 17, а второй выход - с входом блока отображения 14.
Блок 18 функционирует следующим образом,
Информация, поступившая из блока 16 на входной регистр 27 блока 18, служит для организации последовательной выработки управляющих воздействий на нижестоящий уровень иерархии управления (блок 3.1...3.P).
В соответствии с этой информацией блок формирования программных модулей интеллектуальной поддержки 28 на основе логических правил формирует алгоритм действий корабля по приведению системы "корабль-противник" в "нейтральное" положение. Выработанные им рекомендации в виде конкретных данных поступают на регистр 29 и в блок 14. Командир вправе через блок корректуры 17 произвести корректировку этих рекомендаций, отменить или утвердить их.
В ходе отработки кораблем управляющих воздействий узел программного управления задачами 31 производит их контроль и выдает управляющие сигналы в блок 28 для подключения очередной решаемой задачи.
В целом система интеллектуальной поддержки командира корабля функционирует следующим образом.
При заблаговременной подготовке к выходу в море в блок знаний 15 заносятся данные о своих силах и противнике, типовые ("эталонные") действия и тактические приемы. В процессе плавания с помощью блока анализа обстановки 16 производится классификация ситуации, сложившейся в системе "корабль-окружающая среда" и результаты анализа и классификации отображаются на дисплее блока отображения 14 и одновременно поступают на входной регистр 27 блока программных событий 18. Корректировка выработанных на основе анализа текущей обстановки рекомендаций осуществляется блоком корректуры решения 17 путем формирования управляющих сигналов и формализованных команд, поступающих через блок 18 в блок отображения 14 и через модель связи 5 в одно из периферийных устройств 3.1...3.P.
В зависимости от тактической обстановки и выбранного режима работы системы блок 17 позволяет оператору СИПК корректировать исходные данные баз знаний, взаимодействуя с блоком 15, отменять или утверждать рекомендованные решения с помощью элементов блока программных событий 18, повышая тем самым оперативность процесса принятия решения по управлению кораблем.
При этом загрузка программ, позволяющих формировать алгоритм действий командира корабля в сложившейся ситуации в один из процессоров 4.1...4.N и варианты запуска системы с любым числом процессоров производятся при следующем порядке исполнения процедур: активный загружающий процессор устанавливает в память программу обработки радиальных прерываний и активизирует требуемые из разрядов в регистре 8 по линиям 13. Запуск загруженной задачи подрежима чтения регистра 8 и передачи из него через шину сигналов 7 в формирователь адресов 9 для выбора "главного" процессора осуществляется по одной из шин адресов 10.1...10.N.
Выбранный процессор будет решать задачу, необходимость подключения которой диктуется сложившейся обстановкой, взаимодействуя через магистраль обмена 1 и модуль связи 5 с блоком анализа обстановки 16, отображая результаты решения на дисплее блока 14 и взаимодействуя с блоком программных событий 18 через входной регистр 27 и группу вентилей 30.
Арбитраж при захвате магистрали 1 осуществляется при помощи коммутатора 12, объединяющего процессоры 4.1...4.N в последовательную цепочку: "главный" процессор, первый "неглавный", второй..., последний "неглавный", периферийные устройства и блок корректуры решения 17. При одновременном столкновении запросов на магистраль от нескольких абонентов доступ получает первый "неглавный" процессор, выставляя сигнал на шину 6 и через блок управления доступом 11, шину адресов/данных 7, коммутатор 12 выполняет в магистрали 1 требуемую процедуру. При этом, если в какой-то момент времени более приоритетный процессор затребует магистраль 1, он перехватывает управление в первую же предоставившуюся паузу в работе магистрали.
Захват магистрали блоком знаний 15 (для обмена с памятью в режиме прямого доступа) осуществляется по запросу через магистраль 1 и модуль связи 5. При этом коммутатор 12 выдает сигнал в магистраль обмена 1, который поступает в блок 18 как сигнал разрешения захвата магистрали 1 конкретным процессором (любым из блоков 4.1...4.N), решающим одну из задач обработки текущей тактической обстановки, взаимодействуя с соответствующим запоминающим устройством (блоки 2.1...2.M) и блоком знаний 15.
Сигнальная информация из блока связи 5 поступает на входной регистр 19 блока 16 и далее - на схему 21 для сравнения признаков текущей тактической обстановки с состоянием буферного регистра 20 системы. В случае несоответствия состояния системы текущей тактической обстановке узел селекции 22 производит выбор из соответствующего 3 У (блоки 2.1...2.M) типового эпизода, выполнение которого приводит состояние системы в соответствие тактической обстановке и выдает через блок управления индикацией 25 и на выходной регистр 23 требуемые сигналы. Логическое устройство управления 24 в случае утверждения рекомендаций формирует код разрешения выдачи рекомендуемого эпизода в блок программных событий 18 через группу вентилей 26.
Утвержденная командиром рекомендация по выбранному эпизоду поступает на входной регистр 27 блока 18 и в соответствии с поступающей информацией о выполняемом эпизоде блок формирования программных модулей интеллектуальной поддержки 28 формирует алгоритм управления кораблем в тактическом эпизоде в виде программных логических вычислительных модулей, записанных в блоке знаний 15. Расчет конкретных рекомендаций на действия в тактическом эпизоде производится в одном из процессоров 4.1...4.N и через модуль связи 5 код поступает на регистр рекомендаций на действия в эпизоде 29 для передачи на отображение в графической форме блоком 14.
Командир через блок корректуры 17 имеет возможность сформировать соответствующие управляющие сигналы для изменения выработанных рекомендаций по управлению кораблем, которые через группу вентилей 30 поступает на исполнение в периферийные блоки 3.1...3.P (через модуль связи 5) и для контроля отработки в блок анализа обстановки 16 (на буферный регистр 20 состояния системы).
В блок программных событий 18 входит также узел программного управления задачами 31, который производит прием необходимых данных по ходу исполнения рекомендаций в тактическом эпизоде, контролирует порядок их исполнения и выдает в блок 28 команды на подключение новых программных модулей.
Например, для тактической обстановки, отражающей вхождение корабля в зону действия противолодочных сил противника. В этом случае узел программного управления задачами по мере необходимости может задействовать модули по оценке тактики действий подводных лодок, надводных кораблей, самолетов противника и боевых возможностей их оружия, определения возможности выхода из полосы поиска противолодочных сил противника, оценке эффективности использования оружия и средств ГПД назначенным или откорректированным составом залпа по результатам анализа сложившейся тактической обстановки и т.д. Поскольку предлагаемая система содержит ряд блоков, узлов и элементов, охарактеризованных на функциональном уровне, и описываемая форма реализации предлагает использование ряда программируемых средств, то для подтверждения выполнения этими средствами предписываемых им функций в СИПК на фиг. 4 представлена блок-схема вычислительного алгоритма, подтверждающего возможность осуществления изобретения. При этом расширение функциональных возможностей системы достигается за счет повышения оперативности в принятии решений командиром корабля, а также за счет предъявления ему лишь ограниченного множества эффективных альтернатив решения, повышающих надежность выбора решения из числа эффективных (по вероятности) до полутора и более раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБЕСПЕЧЕНИЯ ГИДРОАКУСТИЧЕСКОЙ СОВМЕСТИМОСТИ КОРАБЕЛЬНЫХ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2019 |
|
RU2724112C1 |
| КОМПЬЮТЕРНЫЙ ТРЕНАЖЁР | 2015 |
|
RU2634658C2 |
| Учебно-тренировочный комплекс связи надводного корабля | 2021 |
|
RU2783021C1 |
| ТРЕНАЖЕРНО-ОБУЧАЮЩАЯСЯ СИСТЕМА | 2024 |
|
RU2834774C1 |
| Система управления вооружением летательных аппаратов | 2021 |
|
RU2780716C1 |
| КОМПЛЕКС СВЯЗИ ПОДВИЖНОГО ОБЪЕКТА, СОДЕРЖАЩИЙ АВИАЦИОННЫЙ ТЕРМИНАЛ | 2022 |
|
RU2791279C1 |
| Система интеллектуальной поддержки оператора центра сбора и обработки информации сетецентрической системы освещения подводной обстановки | 2022 |
|
RU2785442C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2551267C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ИСТРЕБИТЕЛЯ | 2010 |
|
RU2439461C1 |
| Система поддержки принятия решений с модульной структурой для операторов судов двойного действия | 2019 |
|
RU2713077C1 |


Изобретение относится к радиоэлектронному вооружению кораблей, в частности к боевым информационно-управляющим системам и корабельным автоматизированным системам управления. Технический результат заключается в повышении оперативности анализа принятой информации об обстановке и надежности выбора решения в процессе управления кораблем. Технический результат достигается тем, что в систему, содержащую М устройств памяти, Р периферийных устройств и устройство обработки информации, включающее N процессоров, модуль связи, блок управления, регистр номера "главного" процессора, коммутатор и формирователь адресов, введены блок отображения информации, блок знаний, блок анализа обстановки, блок корректуры решения и блок программных событий. 2 з. п. ф-лы, 4 ил.
| Вычислительная система | 1974 |
|
SU615483A1 |

