Изобретение относится к области гидроакустики и может быть применено в сетецентрических системах освещения подводной обстановки (ССОПО).
Освещение подводной обстановки (ОПО) в различных районах Мирового океана является весьма актуальной задачей, особенно в связи с необходимостью защиты подводных рубежей, что обусловлено, в том числе, и экономическими интересами многих стран к регионам, где обнаружены большие объемы залежей углеводородов, полезных ископаемых, наличия биологических ресурсов.
Эта задача решается при помощи средств подводного наблюдения (СПН), датчики (сенсоры) которых регистрируют физические поля различной природы подводных объектов - акустические, тепловые, радиационные, электромагнитные и др.
Решение этой задачи только акустическими средствами в настоящее время резко осложнено вследствие существенного снижения уровня заметности - в первую очередь шумности - подводных лодок (ПЛ) и, как следствие, повышения их скрытности.
Опыт многолетней эксплуатации разнородных СПН показывает, что их потенциальные возможности могут быть максимально реализованы при объединении в системы наблюдения различного уровня: одиночного носителя, группы носителей, региональной или глобальной сетецентрической системы.
В настоящее время практически во всех сферах человеческой деятельности, включая и военную, широко применяются такие термины для характеристики этих систем наблюдения, как интегрированные, сетевые, сетецентрические системы, принципиально отражающие системный характер их действий.
Сетецентрическая система освещения подводной обстановки (ССОПО) обеспечивает достижение целей функционирования вышестоящей системы: тактической единицы, группы носителей, группировки сил.
ССОПО может включать в себя средства подводного наблюдения - гидроакустические и неакустические станции и комплексы (ГАС и НАС), как размещенные на мобильных носителях-надводных кораблях (НК), подводных лодках (ПЛ), безэкипажных катерах (БЭК), автономных подводных аппаратах (АПА), летательных аппаратах (ЛА), так и позиционные - стационарные и быстроразвертываемые, а также центр сбора и обработки информации (ЦСОИ), которые объединены и взаимодействуют в едином информационном пространстве [Криницкий С., Охрименко С., Паршуков В., Рубанов И. Сетецентрическая система освещения подводной обстановки за рубежом. // Морской сборник. - 2021.- №2. - с. 48-54; Криницкий С., Лопатиев О., Охрименко С., Паршуков В., Рубанов И. Сетецентрическая система освещения подводной обстановки // Морской сборник. - 2021. - №11. - с. 71-77].
Центр сбора и обработки информации (ЦСОИ) является высшим звеном в иерархической структуре ССОПО и предназначен для сбора и обработки информации от элементов ССОПО и внешних источников, выдачи на них и на другие носители радиоэлектронного вооружения - РЭВ - (летательные аппараты, спутники, береговые части и т.д.) целеуказаний и рекомендаций по дальнейшим действиям.
Большой объем информации, поступающий в ЦСОИ, требует в обязательном порядке разработки системы интеллектуальной поддержки (СИП) ее операторов, в основу которой должен быть положен сценарный подход.
В процессе проектирования и изготовления ГАК, ГАС, НАС (нижний уровень системы) разных составляющих ССОПО предусмотрено создание собственных СИП.
Однако, учитывая сложную иерархическую структуру ССОПО, которая состоит из многочисленных разнородных средств подводного наблюдения, а также внешних источников информации, предназначенных для длительной эксплуатации в реальных условиях, влияние человеческого фактора на результаты ее работы существенно возрастает. Поэтому на верхнем уровне ССОПО также необходимо внедрение собственной СИП, которая бы снизила влияние человеческого фактора в контуре управления и позволила оператору с учетом ее рекомендаций эффективно участвовать в принятии окончательного решения.
Обмен информацией между ЦСОИ и элементами ССОПО, а также внешними системами, может производиться по спутниковым, кабельным, гидроакустическим и радиоканалам связи, что требует кодирования, а также обеспечения ее закрытости при передаче.
Известны интегрированные системы подводного наблюдения (ИСПН) для одиночного надводного корабля (НК) - ИСПН НК [Андреев М., Клюшин В., Охрименко С., Рубанов И., Яковлев В. Интегрированная система подводного наблюдения для надводных кораблей. // Морской сборник. - 2006. - №8. - с.50-51; Андреев М., Максимов Е., Охрименко С., Рубанов И. Интегрированная система подводного наблюдения надводного корабля. // Морской сборник. - 2018. - №6. - с. 70-72].
ИСПН НК по идеологии построения - наличия в ее составе большого числа разнородных автономных систем - может служить прообразом ССОПО [Криницкий С., Лопатиев О., Охрименко С., Паршуков В., Рубанов И. Сетецентрическая система освещения подводной обстановки // Морской сборник. - 2021. - №11. - с. 72].
Известна система интеллектуальной поддержки (СИП) оператора ИСПН НК [Патент РФ №114384 от 11.04.2011].
СИП оператора ИСПН НК содержит систему обмена информации, состоящую из соединенных между собой магистрали обмена и модуля связи, устройства памяти, вход-выход которых соединен с системой обмена информации, первичные датчики информации, выходы которых соединены с входами модуля связи, взаимосвязанные между собой и модулем связи блок знаний и блок отображения.
Известная система интеллектуальной поддержки оператора ИСПН " наиболее близка к предлагаемой по технической сущности и вследствие этого принята за прототип.
Недостатком известного устройства является невозможность при принятой в нем многоуровневой обработки информации [Ермолаев В.И., Козловский СВ. Использование технологий интеллектуальных ГИС в интересах многоуровневой обработки гидроакустической информации. // Труды IX Всероссийской конференции «Прикладные технологии гидроакустики и гидрофизики». С-Пб,: Наука, - 2012. - с. 473-475], исключать на возможно низких уровнях недостоверную информацию, что может привести к ошибкам в решениях оператора ЦСОИ ССОПО.
Задачей изобретения является повышение надежности действий оператора ЦСОИ ССОПО.
Техническим результатом является повышение эффективности функционирования ССОПО.
Для достижения указанного технического результата в известную систему интеллектуальной поддержки, содержащую систему обмена информации, устройства памяти, вход-выход которых соединен с системой обмена информации, первичные датчики информации, выходы которых соединены с соответствующими входами системы обмена информации, взаимосвязанные между собой и системой обмена информации блок знаний и блок отображения, введены новые признаки, а именно: в ее состав введены многоканальный блок сопоставления информации первичных датчиков, блок трассового анализа и прогноза местоположения целей, блок формирования модели обстановки и оценки ситуации наблюдения, блок принятия решения, а также второй и третий блоки отображения, при этом первый вход многоканального блока сопоставления информации первичных датчиков соединен с соответствующими выходами системы обмена информации, а второй - со вторым выходом блока знаний, первый выход соединен со входом первого блока отображения, первый вход блока трассового анализа и прогноза местоположения целей соединен со вторым выходом блока сопоставления информации первичных датчиков, второй - с третьим выходом блока знаний, первый выход соединен со входом второго блока отображения, первый вход блока формирования модели обстановки и оценки ситуации наблюдения соединен со вторым выходом блока трассового анализа и прогноза местоположения целей, второй - с четвертым выходом блока знаний, первый выход - со входом третьего блока отображения, вход блока принятия решения соединен со вторым выходом блока формирования модели обстановки и оценки ситуации наблюдения, первый выход которого соединен со входом командного пункта вышестоящей системы, а второй - с третьим входом блока сопоставления информации первичных датчиков.
Наилучшие результаты достигаются, если:
- блоки отображения и блок принятия решения объединены в единый пользовательский терминал оператора, что облегчает работу оператора вследствие улучшения эргономики его рабочего места;
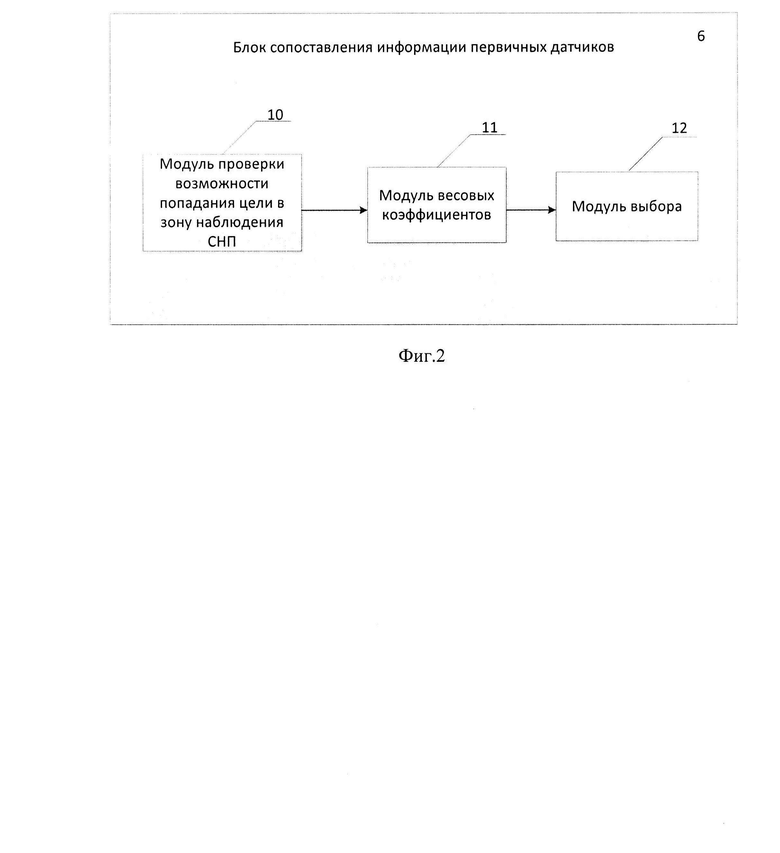
- блок сопоставления информации первичных датчиков содержит последовательно соединенные модуль проверки возможности попадания цели в зону наблюдения СПН, модуль весовых коэффициентов и модуль выбора.
Сопоставление информации (формулярных данных целей) первичных датчиков СПН в многоканальном блоке сопоставления информации первичных датчиков производится с учетом занесенных в их техническую документацию данных по дальности обнаружения, зонах наблюдения, вероятности правильного обнаружения в соответствии с критерием Неймана-Пирсона Рпо [Матвиенко В.Н., Тарасюк Ю.Ф. Дальность действия гидроакустических средств. Л., - Судостроение. - 1976. - с. 151-162; Евтютов А.П., Митько В.Б. Инженерные расчеты в гидроакустике. Л., - Судостроение. - 1988. - с. 70-80].
Введение в состав системы интеллектуальной поддержки блока сопоставления информации первичных датчиков вызвано тем, что информация от них может не совпадать, а в ряде случаев может быть противоречивой вследствие различия зон наблюдения разных датчиков, нахождения датчиков в разных гидроакустических (ГАУ), гидрофизических (ГФУ) и гидрометеорологических (ГМУ) условиях, а также ряда других факторов.
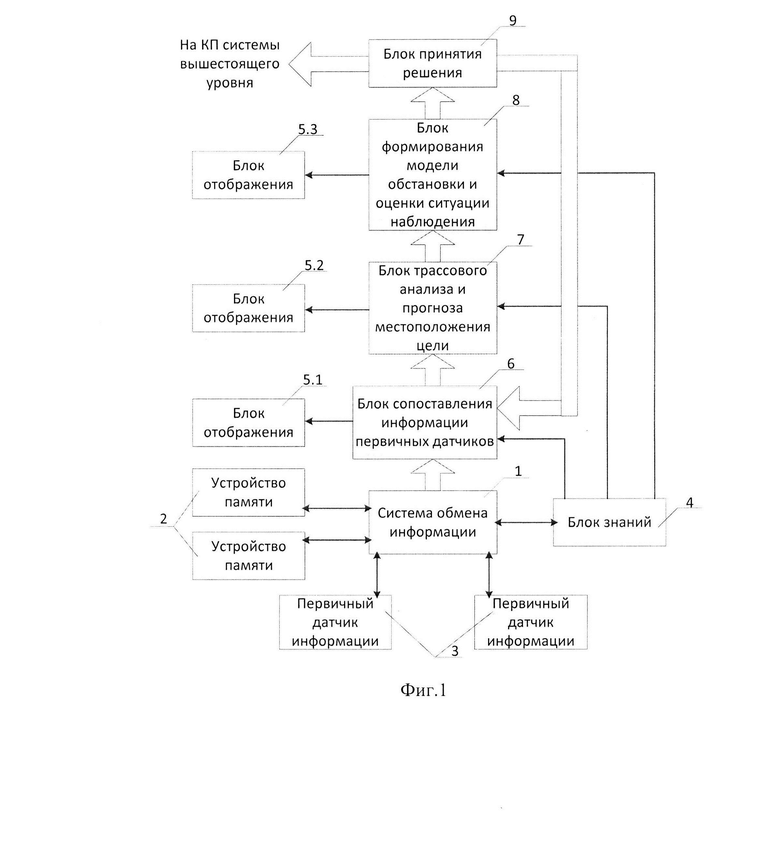
Сущность изобретения поясняется Фиг. 1, Фиг. 2 и Фиг. 3 где на Фиг. 1 приведены соответственно блок-схема предлагаемого устройства - СИП оператора ЦСОИ ССОПО; на Фиг. 2 - блок-схема блока сопоставления информации первичных датчиков; на Фиг. 3-трехмерное представление зоны наблюдения одного из входящих в систему СПН, рассчитанное с учетом реальных ГАУ, ГФУ и ГМУ.
СИП оператора ЦСОИ ССОПО (Фиг. 1) содержит систему обмена информации 1, устройства 2 памяти, первичные датчики 3 информации, блок 4 знаний, блоки 5.1, 5.2 и 5.3 отображения, блок 6 сопоставления информации первичных датчиков, блок 7 трассового анализа и прогноза местоположения целей, блок 8 формирования модели обстановки и оценки ситуации наблюдения, блок 9 принятия решения (Фиг. 1).
Система обмена информации 1 предназначена для приема информации от первичных датчиков информации и других средств РЭВ и передачи ее в блоки СИП.
Устройства памяти 2 предназначены для хранения долговременной информации, поступающей от верхнего уровня иерархии в процессе боевой службы, а также информации, полученной от первичных датчиков 3 и результатов ее обработки.
Блок 4 знаний содержит формализованные знания, содержащиеся в руководящих документах, а также долговременную информацию о параметрах СПН, включая дальности обнаружения, зоны наблюдения и вероятность Рпо правильного обнаружения, тактико-технические характеристики (ТТХ) собственных мобильных носителей СПН, а также вероятных объектов поиска.
Блоки отображения 5.1-5.3 обеспечивают прием и отображение на типовых дисплеях данные, соответственно, от блока 6 сопоставления информации первичных датчиков, блока 7 трассового анализа и прогноза местоположения целей, блока 8 формирования модели обстановки и оценки ситуации наблюдения.
Блок 6 сопоставления информации первичных датчиков обеспечивает сопоставление формулярных данных целей, полученных различными датчиками СПН. Он содержит последовательно соединенные модуль 10 проверки возможности попадания цели в зону наблюдения СПН, модуль 11 весовых коэффициентов и модуль 12 выбора (Фиг. 2).
В модуле проверки возможности попадания цели в зону наблюдения сопоставляются трехмерные координаты обнаруженной цели (ХЦ, УЦ, ZЦ) и показанная на Фиг. 3 трехмерная зона (область) наблюдения данного СПН при соответствующих ГАУ, ГФУ и ГМУ, при которой дальность обнаружения цели на горизонте h зависит от глубины нахождения сенсора конкретного СПН.
В модуле 11 весовых коэффициентов сопоставляются вероятности правильного обнаружения Рпо различных СПН.
В модуле выбора 12 сравнивается информация (формулярные данные целей) датчиков с учетом их вероятности правильного обнаружения Рпо.
Блок 7 трассового анализа и прогноза местоположения целей на основе информации первичных датчиков обеспечивает трассовый анализ движения целей и прогнозирование их дальнейшего местоположения.
Блок 8 формирования модели обстановки и оценки ситуации наблюдения обеспечивает создание и функционирование динамической модели взаимного перемещения целей и СПН.
Блок 9 принятия решения обеспечивает по выбору оператора выдачу на КП системы вышестоящего уровня рекомендации по плану дальнейших действий, либо сигнал на блок сопоставления информации первичных датчиков на продолжение цикла поиска и сопровождения целей.
Все блоки реализованы на бортовых вычислительных комплексах (БВК) современных СПН и ЦСОИ.
СИП оператора функционирует следующим образом.
При формировании ССОПО для данного региона в устройства памяти 2 и в блок знаний 4 заносятся руководящие документы (РД). Также в блок знаний 4 заносятся ТТХ используемых носителей СПН, подводных объектов различного класса, а также другие необходимые при эксплуатации данные.
После начала операции поиска подводных целей и слежения за ними в действие приводятся первичные датчики информации 3 СПН, формулярные данные целей из которых передаются в блок 6 сопоставления информации первичных датчиков (Фиг. 1).
В модуле 10 проверки возможности попадания цели в зону наблюдения СПН (Фиг. 2) сопоставляются координаты обнаруженной цели и полученные из блока знаний 4 данные о зоне (области) наблюдения СПН при соответствующих ГАУ, ГФУ и ГМУ.
В случае, если хотя бы одна из координат обнаруженной цели (Хц, Уц, Zu) не входит в границы области наблюдения СПН, то факт обнаружения назначается ложным, а информация об этой цели с данного СПН далее не передается.
В модуле выбора 12 в случае несовпадения формулярных данных одной и той же цели, полученных различными СПН, за истинные принимаются и передаются на следующий уровень обработки информации данные, полученные СПН с максимальной вероятностью правильного обнаружения Рпо.
Таким образом производится исключение недостоверной информации без участия оператора и, соответственно, уменьшение влияния человеческого фактора на результаты обнаружения цели.
Далее эта информация передается последовательно в блок 7 трассового анализа и прогноза местоположения целей, блок 8 формирования модели обстановки и оценки ситуации наблюдения, блок 9 принятия решения, где оператор СИП ЦСОИ ССОПО на основании анализа графической модели тактической ситуации на экране блока отображения 5.3 принимает решение либо о достаточности информации о цели, либо о необходимости продолжения процесса поиска целей и слежения за ними.
Таким образом, достигается повышение надежности действий оператора и, соответственно, заявленный технический результат - повышение эффективности функционирования ССОПО.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированная система боевого управления нижней полусферы надводного корабля | 2022 |
|
RU2793372C1 |
| Бортовая система прогноза гидрофизических параметров | 2015 |
|
RU2626211C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ ГИДРОАКУСТИЧЕСКОЙ СОВМЕСТИМОСТИ КОРАБЕЛЬНЫХ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2019 |
|
RU2724112C1 |
| Распределенная система подводного наблюдения | 2020 |
|
RU2741760C1 |
| КОРАБЕЛЬНАЯ ИНТЕГРИРОВАННАЯ МОСТИКОВАЯ СИСТЕМА | 2010 |
|
RU2453909C1 |
| Система обработки радиолокационной информации | 2023 |
|
RU2815274C1 |
| СИСТЕМА ИНТЕЛЛЕКТУАЛЬНОЙ ПОДДЕРЖКИ КОМАНДИРА КОРАБЛЯ | 1996 |
|
RU2133498C1 |
| СПОСОБ СБОРА ИНФОРМАЦИИ ОБ ЭКОЛОГИЧЕСКОМ СОСТОЯНИИ РЕГИОНА И АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2010 |
|
RU2443001C1 |
| СПОСОБ ПРЕДАВАРИЙНОГО, АВАРИЙНОГО И ПОСТАВАРИЙНОГО КОНТРОЛЯ ИСТОЧНИКОВ РАДИАЦИОННОЙ, ХИМИЧЕСКОЙ И ВЗРЫВОПОЖАРНОЙ ОПАСНОСТИ В ГЕРМЕТИЧНЫХ ОБИТАЕМЫХ ОБЪЕКТАХ, ПРЕИМУЩЕСТВЕННО ПОДВОДНЫХ ЛОДКАХ, И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2596063C1 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
Изобретение относится к области гидроакустики и может быть применено в сетецентрических системах освещения подводной обстановки (ССОПО). Технический результат заключается в повышении эффективности освещения подводной обстановки и обнаружении подводных объектов за счет автоматического исключения недостоверной информации на ранних этапах ее обработки. Для этого в состав ССОПО введены многоканальный блок сопоставления информации первичных датчиков, блок трассового анализа и прогноза местоположения целей, блок формирования модели обстановки и оценки ситуации наблюдения, блок принятия решения, а также второй и третий блоки отображения, при этом первый вход многоканального блока сопоставления информации первичных датчиков соединен с соответствующими выходами системы обмена информации, а второй - со вторым выходом блока знаний, первый выход соединен со входом первого блока отображения, первый вход блока трассового анализа и прогноза местоположения целей соединен со вторым выходом блока сопоставления информации первичных датчиков, второй - с третьим выходом блока знаний, первый выход соединен со входом второго блока отображения, первый вход блока формирования модели обстановки и оценки ситуации наблюдения соединен со вторым выходом блока трассового анализа и прогноза местоположения целей, второй - с четвертым выходом блока знаний, первый выход - со входом третьего блока отображения, и блок принятия решения, вход которого соединен со вторым выходом блока формирования модели обстановки и оценки ситуации наблюдения, первый выход соединен со входом командного пункта (КП) вышестоящей системы, а второй - с третьим входом блока сопоставления информации первичных датчиков. 2 з.п. ф-лы, 3 ил.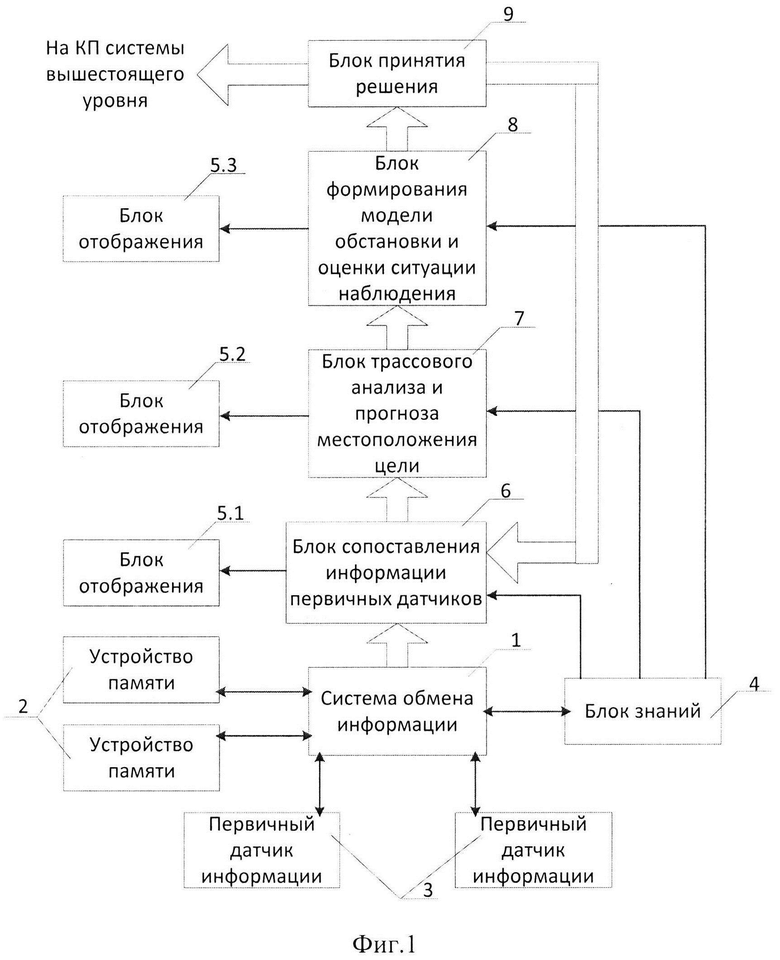
1. Система интеллектуальной поддержки оператора центра сбора и обработки информации системы освещения подводной обстановки, содержащая систему обмена информации, устройства памяти, вход-выход которых соединен с системой обмена информации, первичные датчики информации, выходы которых соединены с соответствующими входами системы обмена информации, блок знаний, вход-выход которого соединен с системой обмена информации, и блок отображения, отличающаяся тем, что в нее введены многоканальный блок сопоставления информации первичных датчиков, блок трассового анализа и прогноза местоположения целей, блок формирования модели обстановки и оценки ситуации наблюдения, блок принятия решения, а также второй и третий блоки отображения, при этом первый вход многоканального блока сопоставления информации первичных датчиков соединен с соответствующими выходами системы обмена информации, а второй - со вторым выходом блока знаний, первый выход соединен со входом первого блока отображения, первый вход блока трассового анализа и прогноза местоположения целей соединен со вторым выходом блока сопоставления информации первичных датчиков, второй - с третьим выходом блока знаний, первый выход соединен со входом второго блока отображения, первый вход блока формирования модели обстановки и оценки ситуации наблюдения соединен со вторым выходом блока трассового анализа и прогноза местоположения целей, второй - с четвертым выходом блока знаний, первый выход - со входом третьего блока отображения, и блок принятия решения, вход которого соединен со вторым выходом блока формирования модели обстановки и оценки ситуации наблюдения, первый выход соединен со входом командного пункта (КП) вышестоящей системы, а второй - с третьим входом блока сопоставления информации первичных датчиков.
2. Система по п. 1, отличающаяся тем, что все блоки отображения и блок принятия решения конструктивно объединены в пользовательский терминал.
3. Система по п. 1 или 2, отличающаяся тем, что блок сопоставления информации первичных датчиков содержит модуль проверки возможности попадания цели в зону наблюдения средств подводного наблюдения (СПН), модуль весовых коэффициентов и модуль выбора, при этом первый и второй входы модуля проверки возможностей попадания целей в зону наблюдения СПН соединены с первым и вторым входами блока сопоставления информации первичных датчиков, а выход - со входом модуля весовых коэффициентов, выход которого соединен со входом модуля выбора, выход которого соединен с выходом блока сопоставления информации первичных датчиков.
| СИСТЕМА ДЛЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538440C2 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2576349C2 |
| Информационно-управляющий комплекс с интеллектуальной поддержкой экипажа | 2020 |
|
RU2755097C1 |
| Способ получения 5-производных тиазолидиндиона-2,4-гидразона-2 | 1957 |
|
SU114384A1 |
| Система поддержки принятия решений с модульной структурой для операторов судов двойного действия | 2019 |
|
RU2713077C1 |

