Изобретение относится к медицинской технике, в частности к устройствам для обучения приемам реанимации.
Известна медицинская интерактивная обучающая система с манекеном-тренажером, выполненным в виде имитирующего человеческое тело фантома, который содержит имитатор дыхания через рот, выполненный в виде воронки из эластичного материала, и имитатор упругости грудной клетки. Тренажер подключен к системе внешнего контроля процесса обучения (патента США 49328790, 09 B 23/28, опуб. 12.06.90).
Известная система позволяет отработать прием восстановления проходимости верхних дыхательных путей, однако обучение на этом тренажере не эффективно, т. к. такой тренажер не обеспечивает достаточной степени приближения к реальным условиям обучения приемам сердечно-легочной реанимации.
Наиболее близким к предлагаемому изобретению является медицинский робот-тренажер, содержащий имитатор кожных покровов и анатомических ориентиров тела человека, имитаторы грудной клетки и легких, имитатор шеи. В голове робота-тренажера размещены имитаторы: дыхания через рот, носовых дыхательных путей. Контроль правильности проведения приемов реанимации осуществляется с помощью имитаторов реакции зрачка и пульсации сонной артерии, а также датчиков, соединенных каналом связи с ЭВМ через приемопередающую систему. Робот-тренажер обладает широкими функциональными возможностями, высокой степенью приближения условий и приемов сердечно-легочной реанимации к реальным (заявка РФ N 94044481, кл. 09 B 23/28, опубл. 20.05.96).
Однако этот робот-тренажер имеет ограниченные функциональные возможности, а степень приближения к реальным условиям обучения приемам сердечно-легочной реанимации при использовании этого робота-тренажера все же недостаточна для эффективного обучения. К тому же использование пневматических имитаторов пульсации сонной артерии и имитаторов реакции зрачка делает индикацию "оживления" робота не вполне надежной из-за возможных утечек воздуха.
Технический результат, получаемый при использовании настоящего изобретения, заключается в приближении условий обучения к реальным, повышение наглядности и надежности процесса обучения.
Дополнительный технический результат состоит в расширении функциональных возможностей.
Технический результат обеспечивается тем, что в известном роботе-тренажере, имитирующем тело человека, содержащем имитатор дыхания через рот, имитатор проходимости верхних дыхательных путей, связанный с имитатором легких, имитатор запрокидывания головы, имитатор грудной клетки, шарнирно закрепленный в области шеи и ключиц, а также имитатор пульсации сонной артерии, два имитатора реакции зрачка, датчик надавливания и датчик ускорения, связанные с блоком индикации, согласно настоящему изобретению датчик ускорения расположен на нижнем неподвижном основании робота-тренажера под имитатором легких, который снабжен датчиком объема вдыхаемого воздуха, имитатор грудной клетки и имитатор легких разделены пластиной, шарнирно закрепленной на одной оси с имитатором грудной клетки или на оси, параллельной и расположенной рядом с осью имитатора грудной клетки, причем пластина подпружинена относительно имитатора грудной клетки, при этом рабочая и измерительная части датчика надавливания размещены на имитаторе грудной клетки и пластине, а все датчики робота-тренажера имеют возможность передачи сигналов на электронный блок обработки сигналов.
Дополнительный технический результат достигается за счет того, что имитатор грудной клетки может иметь полупрозрачную оболочку грудины с изображениями ребер, под которой размещен имитатор кровеносной системы, выполненный из соединенного с источником света оптического волокна с боковым излучением.
Помимо этого, имитатор дыхания через рот и имитатор носовых дыхательных путей могут быть выполнены в виде двух каналов, соединенных посредством одной трубки с имитатором проходимости верхних дыхательных путей.
При этом между имитатором проходимости верхних дыхательных путей и имитатором легких может быть установлен обратный клапан.
Особенностью робота-тренажера по настоящему изобретению является также и то, что блок индикации размещен на запястье одной руки робота-тренажера, выполненной с возможностью вращения по меньшей мере в плечевом суставе.
Еще одна особенность робота-тренажера по настоящему изобретению состоит в том, что в него введены датчики усилия нажатия, расположенные в областях ключиц и мечевидного отростка.
В роботе-тренажере по настоящему изобретению имитатор зрачка может быть выполнен в виде светотеневой маски, освещаемой светодиодом.
В роботе-тренажере по настоящему изобретению имитатор легких может быть снабжен дренажной системой.
При этом дренажная система может быть снабжена бактерицидным фильтром.
Из существующего уровня техники не выявлены объекты, которые содержали бы всю совокупность основных существенных признаков рассматриваемого изобретения, что позволяет считать его новым.
Из существующего уровня техники не выявлены также объекты, которые содержали бы совокупность отличительных признаков рассматриваемого изобретения. Это позволяет считать его имеющим изобретательский уровень.
Изобретение поясняется чертежом, на котором изображена структура робота-тренажера.
Робот-тренажер, имитирующий человеческое тело, содержит оболочку 1, имитатор 2 запрокидывания головы, имитатор 3 дыхания через рот, имитатор 4 носовых дыхательных путей, имитатор 5 проходимости верхних дыхательных путей, включающий два канала 6, 7, соединенных посредством трубки 8 с имитатором 9 легких, выполненным в виде воздушной емкости 10, обратный клапан 11, расположенный на трубке 8, дренажную систему 12 с бактерицидным фильтром 13, связанную с воздушной емкостью 10, имитатор 14 грудной клетки, состоящий из полупрозрачной оболочки грудины с изображением ребер, под которой расположен имитатор 15 кровеносной системы, выполненный из соединенного с источником света оптического волокна с боковым излучением. Имитатор 14 грудной клетки шарнирно закреплен на горизонтальной оси в области шеи и ключиц и содержит пружину 16, смонтированную на пластине 17, также шарнирно закрепленной на оси, которая либо совпадает с осью имитатора 14 грудной клетки, либо параллельна ей и расположена рядом с этой осью в области шеи и ключиц. На имитаторе 14 грудной клетки и пластине 17 размещены рабочая и измерительная части датчика 18 надавливания. Под имитатором 9 легких на нижнем основании тренажера расположен датчик 19 ускорения. Имитатор 9 легких снабжен датчиком 20 объема вдыхаемого воздуха. Робот-тренажер содержит также два имитатора 21 реакции зрачка, выполненные в виде светотеневой маски, освещаемой светодиодами, имитатор 22 пульсации сонной артерии, датчики 23 усилия нажатия, расположенные в областях ключиц - и мечевидного отростка. Кроме того, робот-тренажер имеет блок 24 индикации, размещенный на запястье одной из рук робота, например, левой, выполненной с возможностью вращения в плечевом суставе, а при необходимости - и в локтевом суставе, и связанный с электронным блоком 25 обработки сигналов, который может быть выполнен в виде соответствующим образом запрограммированного микроконтроллера. При этом для наглядности, в случае обучения группы спасателей, электронный блок 25 обработки сигналов может быть выполнен в виде мультимедийного компьютерного комплекса. Робот-тренажер может быть снабжен синтезатором речи, который под управлением электронного блока 25 обработки сигналов может формировать заранее заданные звуковые сообщения. Расположение электронного блока 25 обработки сигналов внутри робота-тренажера не обязательно, особенно в случае его выполнения в виде компьютерного комплекса. В этом случае сигналы с датчиков робота-тренажера не электронный блок 25 обработки сигналов и сигналы на имитаторы 21 и 22 от электронного блока 25 обработки сигналов могут передаваться по проводам либо с помощью радиосигналов, инфракрасного излучения, ультразвука и т. п. Для этого робот-тренажер может быть дооснащен соответствующим приемопередающим оборудованием.
Имитатор 2 запрокидывания головы может быть выполнен точно так же, как и в выбранном ближайшем аналоге, либо любым иным образом, чтобы обеспечивать открывание прохода воздуха в имитатор 9 легких только при надлежащем запрокидывании головы робота-тренажера.
Имитатор 22 пульсации сонной артерии может быть выполнен электромагнитным, типа реле.
Датчики 18 надавливания и 20 объема вдыхаемого воздуха служат для восприятия изменения положения соответствующих частей робота-тренажера и могут быть любого типа, например электромагнитными либо магнитоэлектрическими (герконы).
Датчик 19 ускорения служит для определения силы и длительности прекардиального удара и может быть выполнен в виде магнитоинерционного или инерционного датчика.
Датчики 23 усилия нажатия представляют собой пружинные датчики, срабатывающие от усилия нажатия или удара заданной величины.
Блок 24 индикации предназначен для отображения различных состояний робота-тренажера (его отдельных датчиков имитаторов). Он может быть выполнен в виде жидкокристаллической панели, набора разноцветных светодиодов или лампочек и т.п.
Работа с роботом-тренажером происходит следующим образом.
Перед началом работы робот-тренажер необходимо положить спинной на ровную жесткую поверхность. Включить питание посредством тумблера, расположенного на одной из рук робота. Устройство при этом после сканирования (опроса) датчиков с помощью электронного блока 25 обработки сигналов переходит в состояние ожидания и готово к работе. Отработку приемов сердечно-легочной реанимации предлагается проводить в следующей последовательности.
Отработка навыков выполнения прекардиального удара. Приложить два пальца одной руки на область мечевидного отростка имитатора 14 грудной клетки, нанести короткий удар кулаком другой руки по средней части имитатора 14 грудной клетки выше приложенных пальцев. При правильных действиях датчиков 18 ускорения формирует сигнал, который поступает в электронный блок 25 обработки сигналов, обеспечивающий включение индикаторов 21 реакции зрачков, которые при этом покажут сужение зрачков робота-тренажера, и датчика 22, который покажет пульсацию сонной артерии. В случае допущенных ошибок, когда сила удара превышает допустимую норму, что опасно для пострадавшего, либо удар был нанесен не в то место, датчики 22 усилия нажатия вырабатывают соответствующий сигнал, и электронный блок 25 обработки сигналов оценивает выполнение приема как неудовлетворительное, выводя на блок 24 индикации соответствующее сообщение о переломе ребер или ключиц. При этом синтезатор речи может выдать, например, фразу "перелом ключицы".
Отработка навыков выполнения искусственного дыхания. Прежде всего, должен быть обеспечен свободный доступ нагнетаемого воздуха в имитатор 9 легких. Для этого необходимо зажать нос и запрокинуть голову робота-тренажера назад для обеспечения проходимости дыхательных путей в легкие, открыв имитатор 8 проходимости верхних дыхательных путей для доступа воздуха в имитатор 9 легких. Только при правильном выполнении указанных действий и тщательно зажатом носе робота-тренажера возможно с помощью выдоха в рот робота заполнить имитатор 9 легких настолько, что имитатор 14 грудной клетки приподнимается на 3-4 сантиметра. Датчик 18 надавливания и датчик 20 объема вдыхаемого воздуха вырабатывают соответствующие сигналы, и электронный блок 25 обработки сигналов, определив, что количество воздуха в емкости 10 находится в пределах нормы, сообщит на блок 25 индикации о правильности выполнения входа и начале отсчета правильно выполняемых надавливаний в процессе отработки непрямого масса сердца.
Наличие в воздушной емкости 10 дренажной системы 13 приводит к тому, что через определенный промежуток времени после одиночного вдоха давление в емкости 10 спадает до нуля, имитатор 14 грудной клетки вернется в исходное состояние и электронный блок 25 готов к выработке следующего сигнала.
Наличие подпружиненной пластины 17, разделяющей имитатор 14 грудной клетки и имитатор 9 легких, обеспечивает большую степень подобия и надежности в имитации работы легких.
Отработка навыков непрямого массажа сердца. Освободить от одежды имитатор 14 грудной клетки. Наложить ладонь на имитатор 14 грудной клетки на 2-3 сантиметра выше области мечевидного отростка так, чтобы большой палец спасателя был направлен либо на подбородок, либо на живот робота-тренажера. Непрямой массаж сердца производится только прямыми руками. Произвести до 15 надавливаний на имитатор 14 грудной клетки, если помощь оказывается одним спасателем, и пять надавливаний при участии группы спасателей. Следующее надавливание можно осуществлять только после того, как имитатор 14 грудной клетки вернется в исходное положение. Глубина продавливания имитатора грудной клетки должна быть не менее 3-4 сантиметра, частота надавливаний 60-100 раз в минуту. После первого правильно выполненного цикла реанимации у робота-тренажера включаются имитаторы 21 реакции зрачка.
Один цикл реанимации составляет один вдох плюс пять надавливаний при работе группы спасателей или два вдоха плюс пятнадцать надавливаний при работе одного спасателя. При правильном выполнении спасателем (спасателями) восьми циклов реанимации электронный блок 25 обработки сигналов включит имитатор 22 пульсации сонной артерии, при этом имитаторы 21 реакции зрачка работают в течение всех циклов реанимации.
Указанные изменения зрачков и наличие пульсации сонной артерии будут иметь место только в том случае, если спасатель правильно выполнил приемы проведения искусственного дыхания и непрямого массажа сердца.
Таким образом, достигается полная имитация успешного оживления человека. После прекращения действий, зрачки уже через 2-3 минуты вернутся в исходное состояние. При неправильном или неполном проведении комплекса реанимационных воздействий зрачки будут оставаться постоянно широкими.
Сигнал о неправильном положении рук спасателя с датчика 23 поступает в электронный блок 25 обработки сигналов, который также проводит анализ частоты надавливаний и величины прикладываемых усилий с датчика 18 с выдачей соответствующих сообщений на блок 24 индикации, например, загорается светодиод "Перелом мечевидного отростка" либо идет аналогичное речевое сообщение.
Широкие функциональные возможности робота-тренажера, надежность в эксплуатации, высокая степень приближения к реальным условиям обучения приемам сердечно-легочной реанимации, высокая степень компьютеризации, дистанционность системы контроля и независимость имитатора тела человека от сетей питания позволяют использовать робот-тренажер для обучения индивидуальным и коллективным действиям спасателей в экстремальных ситуациях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ НАВЫКОВ ПЕРВОЙ МЕДИЦИНСКОЙ ПОМОЩИ | 1999 |
|
RU2144218C1 |
| РОБОТ-ТРЕНАЖЕР | 2005 |
|
RU2278420C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ И РАЗВИТИЯ НАВЫКОВ ВЫПОЛНЕНИЯ ИСКУССТВЕННОГО ДЫХАНИЯ РОТ В РОТ | 2022 |
|
RU2791812C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ПРИЕМАМ ЭКСТРЕННОЙ ТРАВМАТОЛОГИЧЕСКОЙ И РЕАНИМАЦИОННОЙ ПОМОЩИ | 1993 |
|
RU2124762C1 |
| Манекен-тренажер для обучения методике сердечно-легочной реанимации | 1976 |
|
SU563686A1 |
| Манекен-тренажер для обучения приемам оживления человека | 1973 |
|
SU463137A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ НАВЫКАМ ПЕРВОЙ И РЕАНИМАЦИОННОЙ ПОМОЩИ ДЕТЯМ | 2001 |
|
RU2189640C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ПРИЕМАМ ПОМОЩИ ЧЕЛОВЕКУ ПРИ НЕОТЛОЖНЫХ СОСТОЯНИЯХ | 1998 |
|
RU2176822C2 |
| Устройство для обучения приемам реанимации | 1991 |
|
SU1817863A3 |
| ИНТЕРАКТИВНЫЙ ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ НАВЫКОВ ПО ОКАЗАНИЮ ПЕРВОЙ ПОМОЩИ ЧЕЛОВЕКУ ПРИ ЗАКУПОРКЕ ВЕРХНИХ ДЫХАТЕЛЬНЫХ ПУТЕЙ | 2013 |
|
RU2550665C2 |
Изобретение относится к медицинской технике, в частности к устройствам для обучения приемам неотложной помощи. Технический результат заключается в повышении степени приближения к реальным условиям при обучении приемам сердечно-легочной реанимации. Робот-тренажер содержит имитирующий тело человека фантом, в котором размещены имитатор запрокидывания головы, имитатор носовых дыхательных путей, имитатор дыхания через рот, имитатор проходимости верхних дыхательных путей, имитатор грудной клетки, имитатор легких, имитатор пульсации сонной артерии, имитатор реакции зрачка, датчики надавливания, ускорения и объема вдыхаемого воздуха, связанные с блоком индикации и имеющие возможность передачи сигналов на электронный блок обработки сигналов, имитатор грудной клетки и имитатор легких разделены пластиной, подпружиненной относительно имитатора грудной клетки. Правильность выполнения обучаемым приемам реанимации отображается на блоке индикации, а также сужением зрачка робота и появлением пульсации сонной артерии. 8 з.п. ф-лы, 1 ил.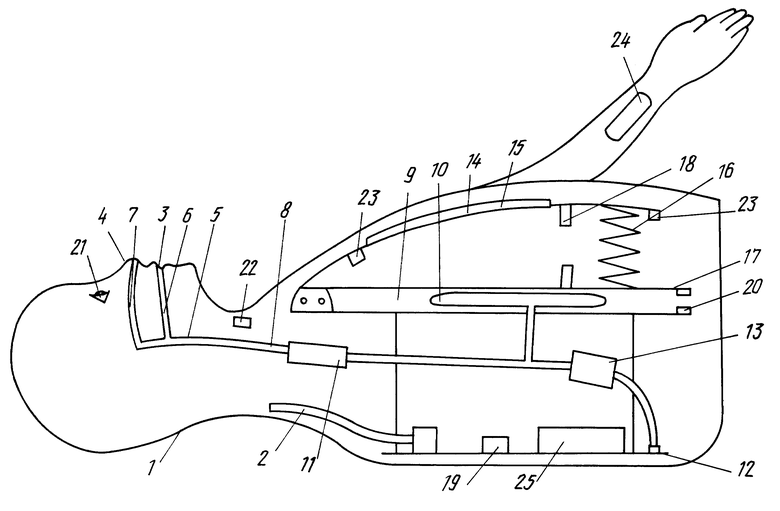
| RU заявка 94044481, 20.05.96 | |||
| US 4932879 A, 12.06.90. |

