Изобретение относится к механизации трудоемких процессов в животноводстве, в частности, к мобильным раздатчикам сухих кормов и влажных кормосмесей, используемых на свиноводческих фермах и комплексах.
Известен кормораздатчик, включающий смонтированный на тележке бункер, имеющий поворотный выгрузной шнек с приемной воронкой и электроприводом, связанным с блоком управления (Ав. св. СССР N 1510798, кл. A 01 K 5/02, 1988 г).
Недостатком данного кормораздатчика является невозможность раздачи жидких кормов и кормовых смесей.
Наиболее близким по технической сущности и достигаемому результату является кормораздатчик, включающий расположенные на тележке бункер, в днище которого установлен выгрузной шнек-дозатор для сухих кормов, емкость для жидких кормов с выпускным трубопроводом, электропривод колес тележки и шнека-дозатора, связанный с блоком управления (Ав. св. СССР N 735224, кл. A 01 K 5/00, 1980).
К основным недостаткам известного раздатчика относятся сложность одновременной нормированной выдачи сухих и жидких кормов, а также сложность процесса перевода кормораздатчика из одного кормового прохода в другой и использование его в свинарнике с различной шириной кормового прохода.
Задачей данного изобретения является повышение точности нормированной выдачи кормов и технологической надежности работы кормораздатчика.
Сущность данного изобретения заключается в том, что кормораздатчик, содержащий расположенные на тележке бункер, в днище которого установлен выгружной шнек-дозатор для сухих кормов, емкость для жидких кормов с выпускным трубопроводом, электроприводы колес тележки и шнека-дозатора, связанные с блоком управления, отличается тем, что днище бункера, шнек-дозатор и концевая часть выпускного трубопровода установлены с возможностью совместного поворота в горизонтальной плоскости относительно бункера и тележки, причем средняя часть трубопровода выполнена в виде нескольких параллельных ветвей с электромагнитными клапанами, а его начальная часть имеет насос и предохранительный клапан, при этом насос и электромагнитные клапаны связаны через блок управления с электроприводом шнека-дозатора. Конечная часть трубопровода выполнена в виде двух патрубков, один из которых имеет оросительную рамку. Тележка снабжена дифференциалами, установленными на осях ее колес, а электроприводы тележки и шнека-дозатора связаны с блоком управления посредством преобразователей частоты. Бункер снабжен сводоразрушителями корма, установленными на внутренней поверхности днища или бункера.
Таким образом, данное устройство содержит совокупность признаков, общих с прототипом, а также признаки, отличительные от прототипа, что позволяет сделать вывод о соответствии заявленного технического решения условиям "новизна" и "изобретательских уровень".
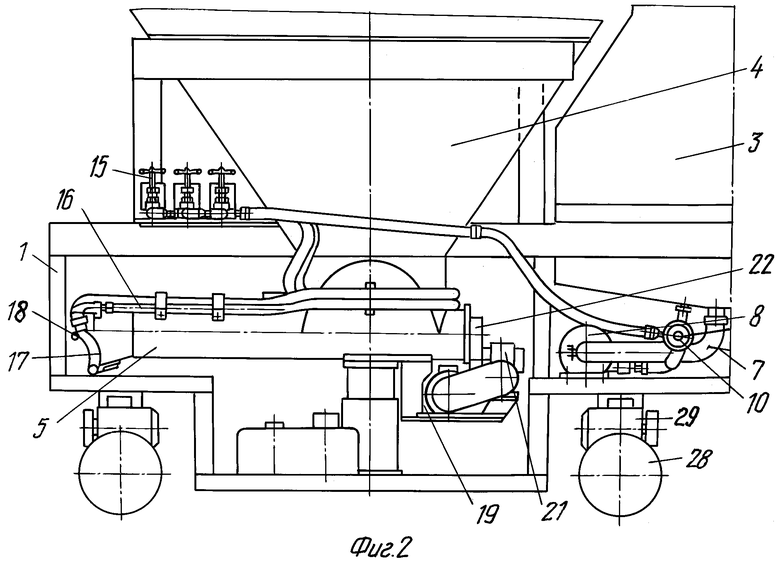
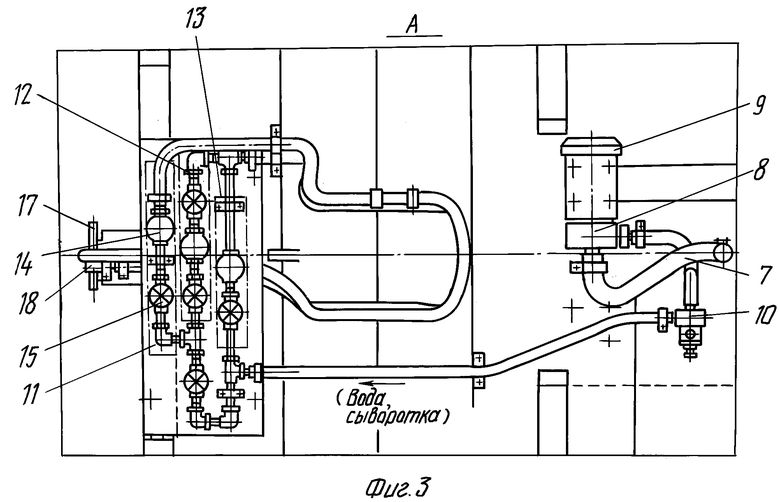
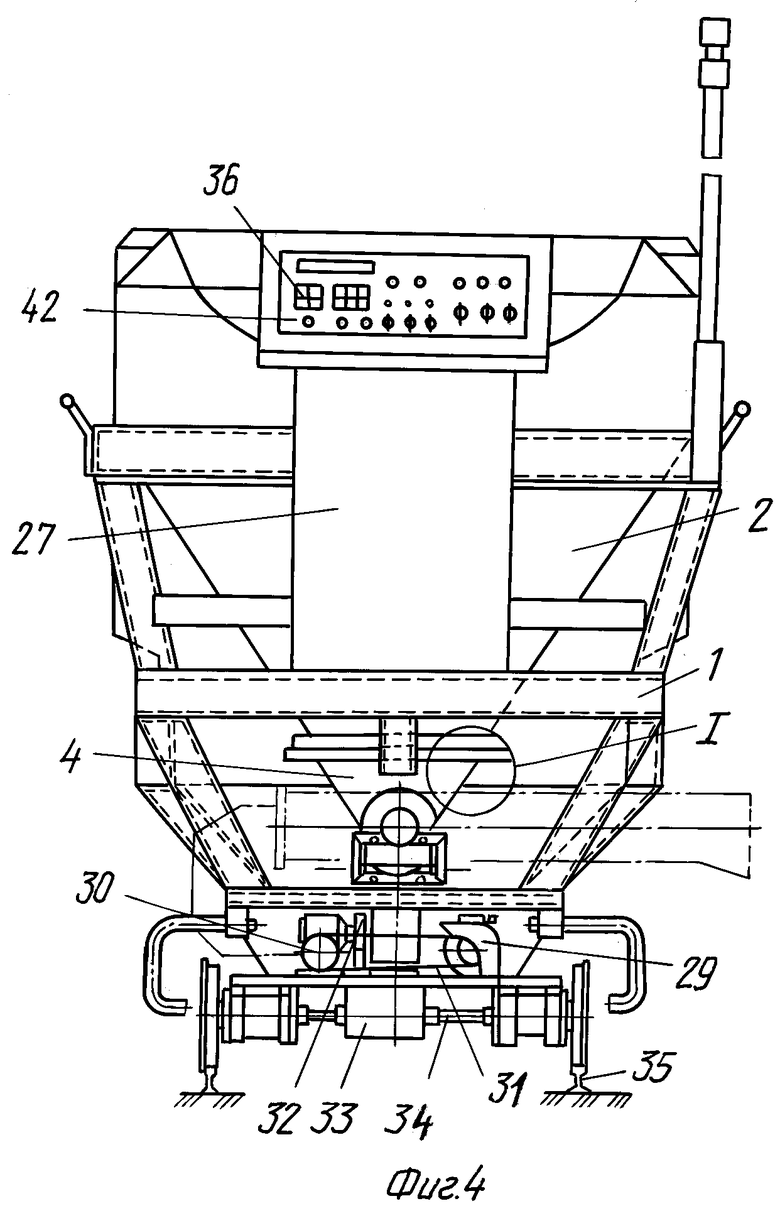
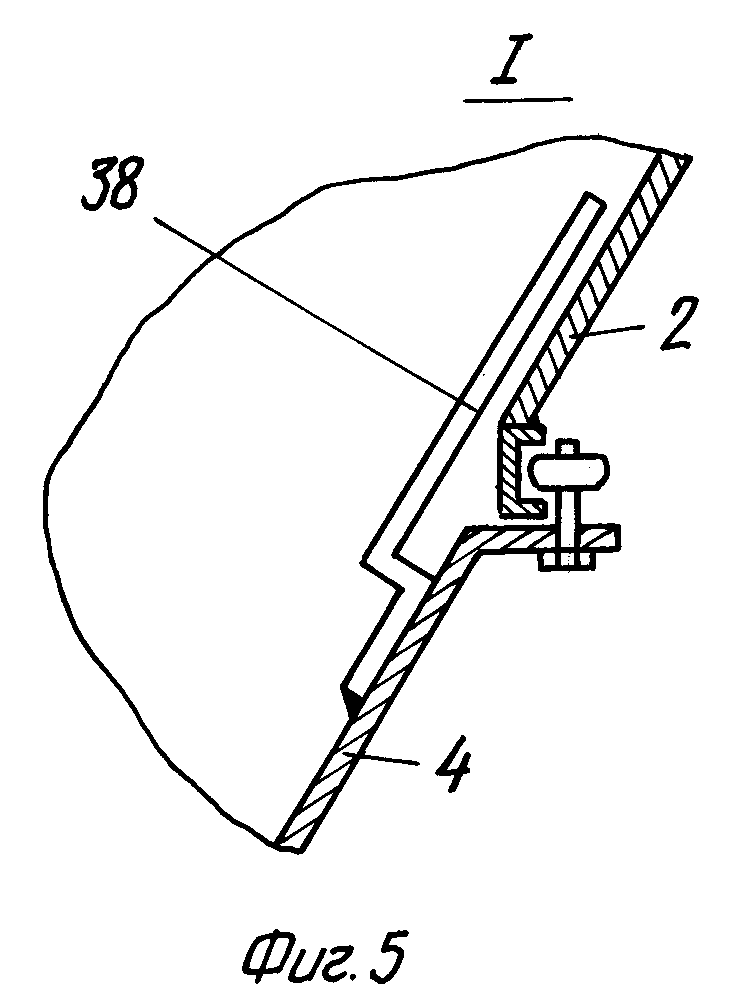
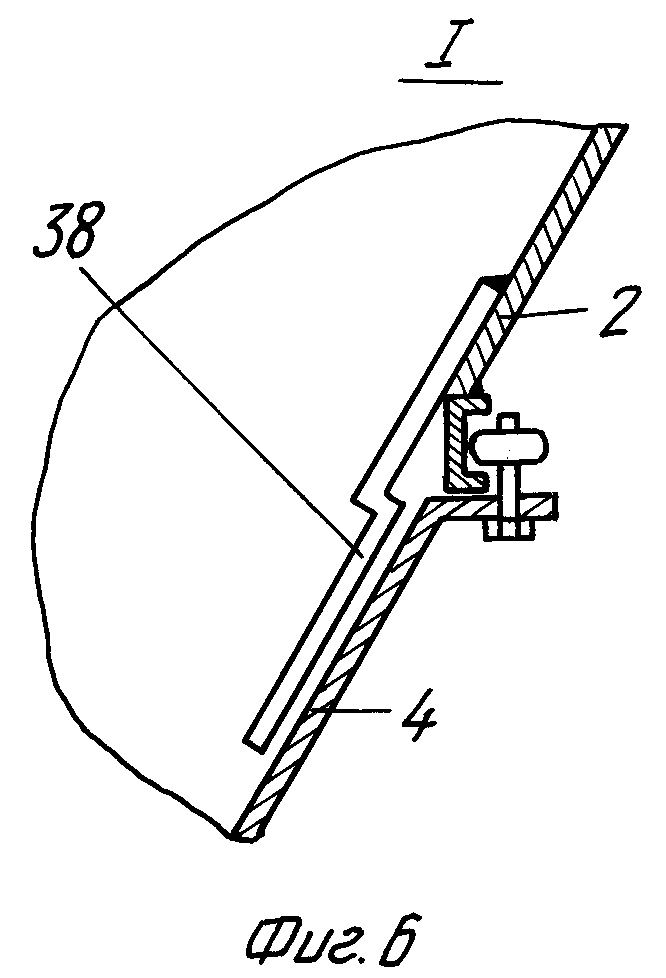
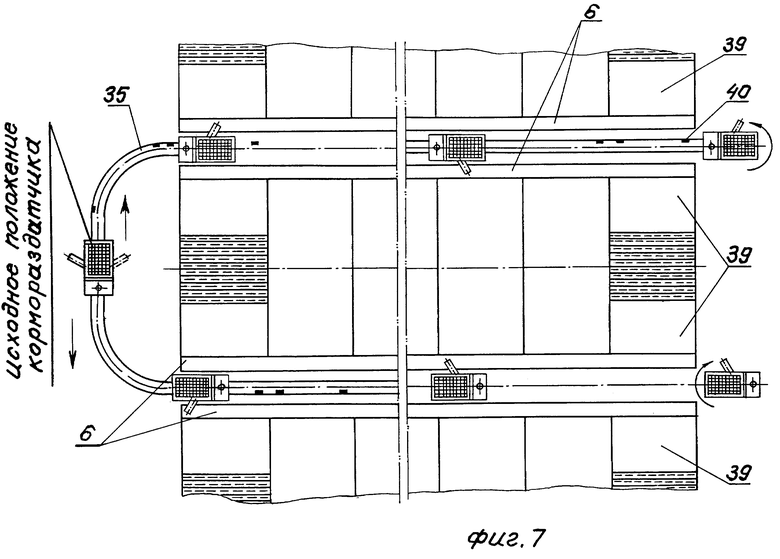
На фиг. 1 изображен общий вид кормораздатчика, вид сбоку; на фиг. 2 - то же, вид нижней части кормораздатчика; на фиг. 3 - вид А на фиг. 1 на выпускной трубопровод для жидких кормов; на фиг. 4 - вид кормораздатчика спереди; на фиг. 5 и 6 - фрагменты вариантов установки лепестковых сводоразрушителей на внутренней поверхности поворотного днища или бункера; на фиг. 7 - схема передвижения кормораздатчика по кормовым проходам, вид сверху.
Кормораздатчик содержит самоходную тележку 1, на которой расположены бункер 2 для сухих сыпучих кормов и емкость 3 для жидких кормов или смачивающей сухой корм жидкости. Бункер 2 выполнен в форме усеченного конуса и снабжен в нижней части поворотным в горизонтальной плоскости воронкообразным днищем 4, в которое вмонтирован выгрузной шнек-дозатор 5 для подачи сухого корма в кормушки 6. Емкость 3 имеет в нижней части выпускной трубопровод 7, в начальной части которого установлены подающий насос 8 с электродвигателем 9 и предохранительный обратный клапан 10. Средняя часть трубопровода выполнена в виде трех параллельных ветвей 11, 12, 13, каждая из которых имеет электромагнитный клапан 14 и запорный вентиль 15. Концевая часть 16 трубопровода 7 закреплена на корпусе шнека-дозатора 5 с возможностью совместного с ним поворота в горизонтальной плоскости относительно бункера и тележки и выполнена в виде двух ветвей, одна из которых имеет на конце оросительную рамку 17, а вторая - патрубок 18 для подачи жидкости непосредственно в кормушки 6.
Привод шнека-дозатора осуществляется от электродвигателя 19 посредством ременной передачи 20, червячного редуктора 21 и зубчатой передачи 22.
Привод совместного поворота шнека-дозатора 5, конического днища 4 и конической части трубопровода 7 в горизонтальной плоскости осуществляется от электродвигателя 23 посредством ременной передачи 24, червячного редуктора 25 и конической пары 26. Электродвигатель 9 насоса и электромагнитные клапаны 14 ветвей трубопровода 7 электрически связаны через блок управления 27 с электродвигателем 19 привода шнека-дозатора 5.
Главный привод колес 28 тележки осуществляется от электродвигателя 29 через червячный редуктор 30, связанный с электродвигателем ременной передачей 31, зубчатую передачу 32 и дифференциал 33, который соединен с колесами тележки. При этом привод передней и задней осей тележки выполнен раздельным, что обеспечивает возможность самостоятельного поворота осей относительно рамы тележки. Максимальный угол их поворота от среднего состояния составляет 30o в каждую сторону. Это позволяет кормораздатчику поворачиваться по дуге с радиусом, равным расстоянию между осями колес. Каждое колесо тележки имеет самостоятельный приводной вал 34, соединенный с дифференциалом, что позволяет каждой оси тележки, колеса которых обкатываются по наружным сторонам рельс 35, автоматически поворачиваться по дуге и проходить ее без скольжения колес.
Управление электродвигателями главного привода, привода шнека-дозатора, привода совместного поворота днища, шнека-дозатора и трубопровода, а также открытия и закрытия электроклапанов осуществляется от блока управления 27. Регулирование скорости вращения шнека-дозатора и скорости передвижения раздатчика осуществляется посредством преобразователей частоты 36 типа CF-23.
На конце шнека-дозатора установлена поворотная заслонка 37, которая приводится в действие посредством кулачков, установленных на решетчатом ограждении в начале и в конце каждого станка (на чертежах не показаны).
Внутри бункера 2 установлены лепестковые сводоразрушители корма 38, которые могут быть закреплены как на корпусе поворотного днища, так и на корпусе самого бункера. Кроме того, бункер 2 и емкость 3 снабжены датчиками контроля верхнего и нижнего уровней сухого и жидкого корма (на чертежах не показаны).
Для подачи команды на включение привода передвижения раздатчика, привод шнека-дозатора 5 на транспортном пути - в начале и в конце каждого станка 39 установлены металлические флажки 40, взаимодействующие с бесконтактными датчиками 41, связанными с блоком управления 27 через преобразователи частоты 36. Для управления работой раздатчика на блоке управления 27 предусмотрен пульт управления 42.
Кормораздатчик работает следующим образом. В исходном положении кормораздатчик устанавливается в кормовом отделении под бункером-накопителем (на чертежах не показаны). В автоматическом режиме по команде с пульта блока управления в бункер 2 загружается рассыпной комбикорм. При достижении кормом верхнего предельного уровня срабатывает датчик уровня, подача корма прекращается. Одновременно происходит заливка в емкость 3 жидкого корма (обрат, вода и др.). При достижении жидкостью верхнего предельного уровня срабатывает датчик верхнего уровня и подача жидкости в емкость 3 прекращается.
После загрузки команда на движение кормораздатчика из исходного положения подается оператором с пульта 42 при правом положении шнека-дозатора 5. Предварительно в контроллер блока управления 27 вводятся данные о норме корма и количестве животных в каждом станке свинарника. Для этого на клавиатуре пульта оператор набирает номер станка, норму корма на одно животное данной половозрастной группы для одного кормления, количество животных в станке и длину станка. Заданные параметры храняться в постоянном запоминающем устройстве контроллера. После нажатия кнопки "Пуск" кормораздатчик начинает движение по рельсам 35 к кормушке 6. При прохождении кормораздатчика над металлическим флажком 40, установленным вначале правого станка, срабатывает датчик 41 "Начало-конец станка" и подает сигнал в коллектор, который, управляя преобразователем частоты 36, включает привод шнека-дозатора 5 с частотой вращения, соответствующей выдаче заданной для первого правого станка норме кормления и количеству животных. При этом от кулачка, установленного в начале станка 39, открывается заслонка 37 на конце шнека и комбикорм начинает поступать в кормушку.
Одновременно с подачей сухого корма по сигналу от блока управления включается насос 8 и открывается необходимое количество электромагнитных клапанов 14, обеспечивающих подачу жидкого корма по трубопроводу 7 в кормушку, который через оросительную рамку 17 смачивает и обеспыливает поток сухого корма, а через патрубок 18 увлажняет комбикорм в кормушке до заданной консистенции.
При прохождении кормораздатчика над флажком 40, установленным в конце первого правого станка, повторно срабатывает датчик "Начало-конец станка" и подает сигнал в контроллер на отключение привода шнека-дозатора и электромагнитных клапанов 14 подачи жидкости. В тот момент, когда жидкий корм в кормушку не поступает (при движении между смежными станками и вне кормовых проходов), он направляется через обратный клапан 10 назад в емкость 3. При раздаче в групповые кормушки (сплошные по фронту кормления) кулачок для закрытия заслонки 37 устанавливают в конце последнего станка ряда.
Выдача заданной нормы корма в кормушку второго станка осуществляется аналогичным образом.
Когда раздатчик выдает корм в последнюю кормушку правого ряда и датчик "Конец ряда" займет положение над флажком 40, он срабатывает и выдает сигнал в контроллер "Конец ряда". При этом контроллер блока управления выдает команды на останов электродвигателя 29 передвижения разрядника, разворот шнека-дозатора 5 на левую сторону. Угол поворота шнека-дозатора 5 и концевой части 16 трубопровода зависит от величины расстояния между кормушками и регулируется смещением конечного выключателя.
При срабатывании датчика "Шнек слева" контроллер включает электродвигатель 23 поворота шнека-дозатора и затем включает электродвигатели 29 передвижения раздатчика для движения назад.
Процесс выдачи корма на левую сторону приходится аналогично выдаче на правую сторону.
При подъезде кормораздатчика к повороту как со стороны исходного положения, так и со стороны кормового прохода включается датчик 40 "Начало-конец поворота". При этом контроллер уменьшает скорость передвижения раздатчика, выдавая соответствующую команду преобразователю частоты. После прохождения поворота датчик "Начало-конец поворота" включается еще раз и по команде контроллера преобразователь увеличивает скорость передвижения раздатчика до номинальной.
После выдачи корма в последнюю кормушку левого ряда при движении по правому кормовому проходу раздатчик продолжает перемещение до исходного положения, в котором срабатывает датчик "Исходное положение", контроллер при этом подает команду на отключение электродвигателей 29 передвижения раздатчика. Шнек-дозатор 5 и конечная часть 16 трубопровода 7 при этом остаются в прежнем положении (не поворачиваются).
В исходном положении кормораздатчик снова загружается сухим и жидким кормом и после поступления команды от датчиков верхнего уровня в бункере 2 и емкости 3 контроллер выдает команду на движение раздатчика в левый кормовой проход (команда "назад").
При подъезде кормораздатчика к началу первого станка правого ряда (в левом кормовом проходе) по сигналу датчика "Начало-конец" станка начинается выдача корма в кормушки правой стороны кормового прохода, затем левой стороны этого прохода. После выдачи корма в последний станок кормораздатчик продолжает передвижение до срабатывания датчика "Исходное положение". При этом шнек-дозатор 5 остается в прежнем положении, т.е. справа по отношению к движущемуся вперед кормораздатчику.
При раздаче корма в индивидуальные кормушки (контроллер определяет, что кормушка является индивидуальной, если ее длина менее 0,5 м), скорость вращения шнека-дозатора 5 задается максимальной, привод передвижения раздатчика останавливается, а необходимая норма корма определяется временем работы шнека-дозатора. По истечении заданного времени привод шнека-дозатора 5 выключается, а также выключается привод тележки.
Корректировка нормы выдаваемого корма на голову производится оператором вручную один раз в 7 - 10 дней в соответствии с выбранным рационом или по мере необходимости (освобождение станка на санитарную обработку, выбраковка животных и другие операции).
Количество жидкого корма, подаваемого в кормушку, определяется удельным расходом жидкого корма, подаваемого через трубопровод 7, и временем подачи, которое определяется промежутком времени между включением и выключением электроклапанов 14 на ветвях 11, 12, 13. Удельный расход жидкости через каждую ветвь регулируется соответствующими вентилями 15.
Настройка режимов наполнения кормушек 6 производится следующим образом. Первую ветвь 11 трубопровода вентилем 15 регулируют так, чтобы наименьшая требуемая порция жидкого корма выдавалась при орошении сухого корма через рамку 17 в кормушку при закрытых электроклапанах во второй 12 и третьей 13 ветвях за время прохождения раздатчиком данной кормушки.
При настройке на второй режим вентилем 15 регулируют расход через вторую ветвь 12 так, чтобы при закрытом электроклапане в третьей ветви 13 при подаче жидкого корма через первую и вторую ветви 11 и 12 за время открытия их электроклапанов в кормушку вылилась требуемая доза жидкого корма.
При настройке на третий режим аналогичным образом настраивают третью ветвь 13, а вторую ветвь 12 не открывают и так далее.
В случае необходимости иметь большее число автоматических режимов наполнения кормушек жидким кормом это можно обеспечить за счет изменения времени наполнения кормушек с помощью программных средств через блок управления, а именно путем изменения скорости передвижения кормораздатчика.
При необходимости кормораздатчик может работать также в ручном (вспомогательном) режиме управления. При этом управление всеми исполнительными механизмами осуществляется с пульта управления оператором.
Таким образом, данный кормораздатчик обеспечивает нормированную выдачу сухих кормов с одновременным их увлажнением в групповые и индивидуальные кормушки по заданной программе в свинарниках с несколькими кормовыми проходами, имеющими различную ширину.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНИЯ РАЗДАЧИ СЫПУЧИХ КОРМОВ | 2000 |
|
RU2178640C1 |
| КОРМОРАЗДАТЧИК-СМЕСИТЕЛЬ | 1997 |
|
RU2118083C1 |
| Кормораздатчик | 1991 |
|
SU1793864A3 |
| РАЗДАТЧИК КОРМОВ | 1998 |
|
RU2129779C1 |
| РАЗМОЛЬНО-СМЕСИТЕЛЬНЫЙ БЛОК | 2002 |
|
RU2214139C1 |
| МОБИЛЬНЫЙ РАЗДАТЧИК ВЛАЖНЫХ КОРМОВ | 1972 |
|
SU354818A1 |
| Раздатчик кормов для животных | 1978 |
|
SU735224A1 |
| Кормораздатчик | 1973 |
|
SU452317A1 |
| КОРМОРАЗДАТЧИК | 2000 |
|
RU2185725C1 |
| МАЛОГАБАРИТНЫЙ АГРЕГАТ ДЛЯ ВНЕСЕНИЯ ПОДСТИЛКИ | 2000 |
|
RU2173516C1 |
Изобретение относится к сельскому хозяйству и предназначено для механизации животноводства. Кормораздатчик содержит самоходную тележку с бункером для сухих комбикормов и емкостью для жидких кормов. В днище бункера вмонтирован выгрузной шнек - дозатор, который установлен с возможностью поворота в горизонтальной плоскости вместе с днищем и конечной частью выпускного трубопровода для подачи жидких кормов или смачивающей жидкости из емкости. Средняя часть трубопровода состоит из трех параллельных ветвей, на каждой из которых установлены электромагнитные клапаны и запорные вентили. В начале трубопровода установлен насос с предохранительным обратным клапаном для подачи жидкого корма из емкости в кормушки и смачивания сухого корма, поступающего в кормушки из шнека-дозатора. При этом жидкость на смачивание корма подается через оросительную рамку, а в кормушку-через патрубок. Работа кормораздатчика осуществляется в автоматическом режиме через блок управления и в ручном режиме оператором с пульта. Данный кормораздатчик обеспечивает нормированную выдачу сухих кормов с одновременным их увлажнением в групповые или индивидуальные кормушки по заданной программе в животноводческих помещениях с несколькими кормовыми проходами, имеющими различную ширину. 3 з.п. ф-лы, 7 ил.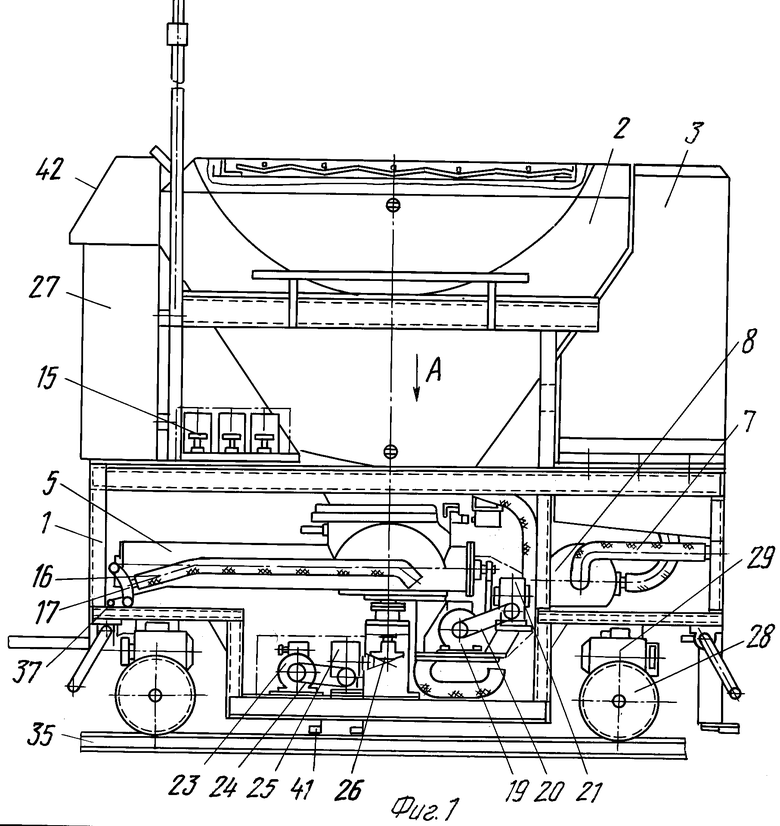
| Раздатчик кормов для животных | 1978 |
|
SU735224A1 |
| Кормораздатчик | 1988 |
|
SU1510798A1 |
| Устройство для дозированного кормления животных | 1986 |
|
SU1442150A1 |
| Устройство для управления дозатором мобильного кормораздатчика | 1982 |
|
SU1080801A1 |
