(Л
to
ел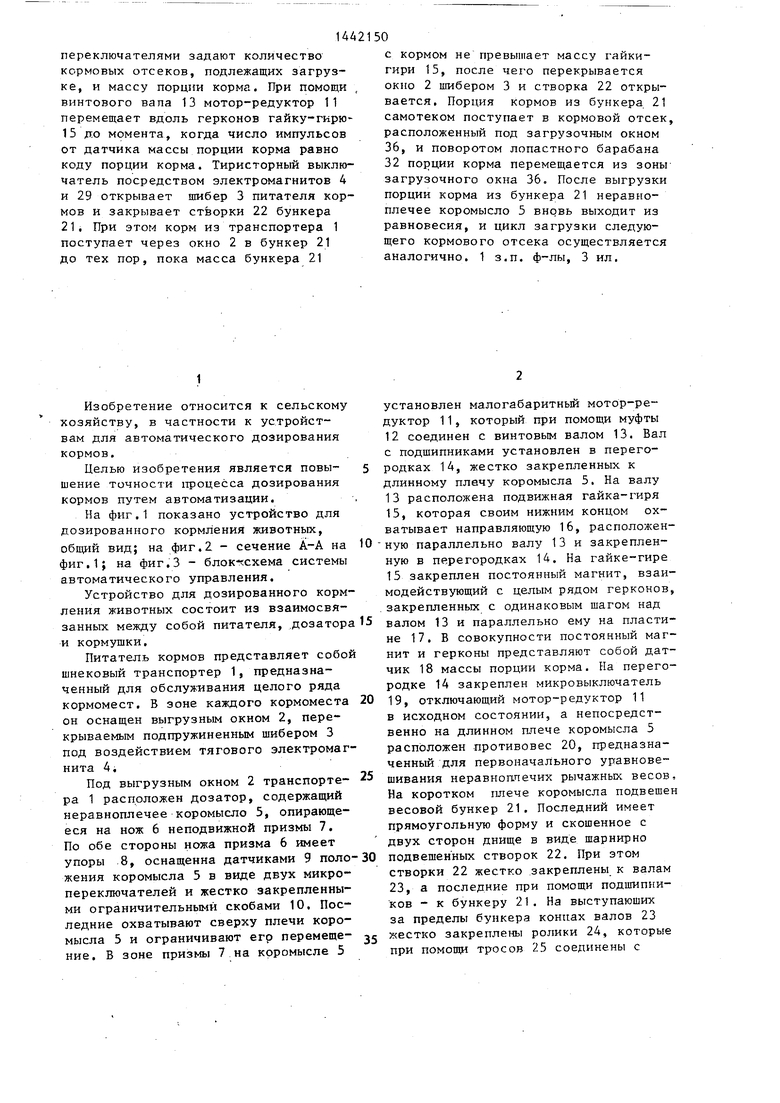
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический дозатор кормов | 1988 |
|
SU1644845A1 |
| Кормушка для рыб | 1980 |
|
SU942641A1 |
| Дозатор сыпучих кормов | 1986 |
|
SU1380696A1 |
| Кормораздатчик-дозатор | 1988 |
|
SU1576080A1 |
| Автоматический дозатор кормов | 1990 |
|
SU1803008A1 |
| Устройство для раздачи кормов | 1988 |
|
SU1611294A1 |
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2005 |
|
RU2288452C1 |
| Роботизированная станция приготовления смесей для кормления животных | 2023 |
|
RU2818415C1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1318799A1 |
| Автоматические весы для контрольного взвешивания проходящих через них штучных грузов | 1954 |
|
SU100581A1 |
Изобретение относится к сельскому хозяйству, в частности к устройствам для автоматизированного до- зирования кормов. Цель изобретения - повышение точности процесса дозирования кормов путем автоматизации. При подготовке устройства к работе противовесом 20 приводят неравноплечие весы в равновесие. Кодирующими 7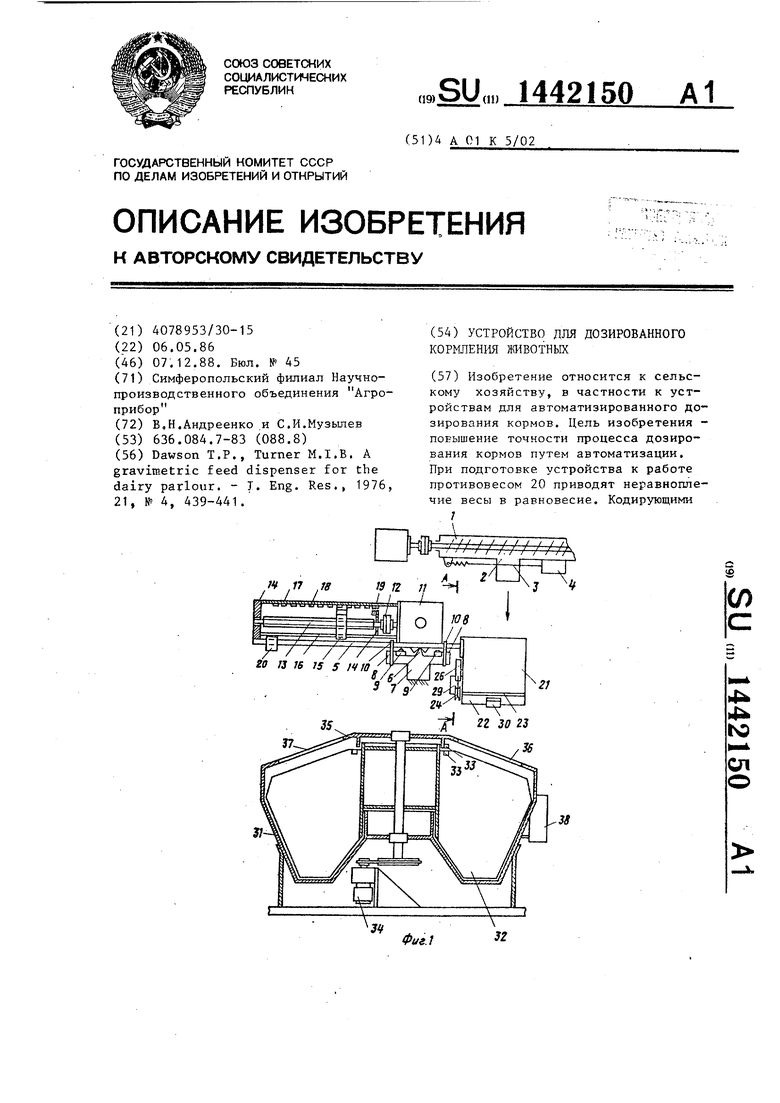
J
Фиг.1
32
1А
переключателями задают количество кормовых отсеков, подлежащих загрузка, и массу порции корма. При помощи винтового вала 13 мотор-редуктор 11 перемещает вдоль герконов гайку-гирю- 15 до момента, когда число импульсов от датчика массы порции корма равно коду порции корма. Тиристорный выключатель посредством электромагнитов 4 и 29 открывает шибер 3 питателя кормов и закрывает створки 22 бункера 21. При этом корм из транспортера 1 поступает через окно 2 в бункер 21 до тех пор, пока масса бункера 21
Изобретение относится к сельскому хозяйству, в частности к устройствам для автоматического дозирования кормов.
Целью изобретения является повы- шение точности процесса дозирования кормов путем автоматизации.
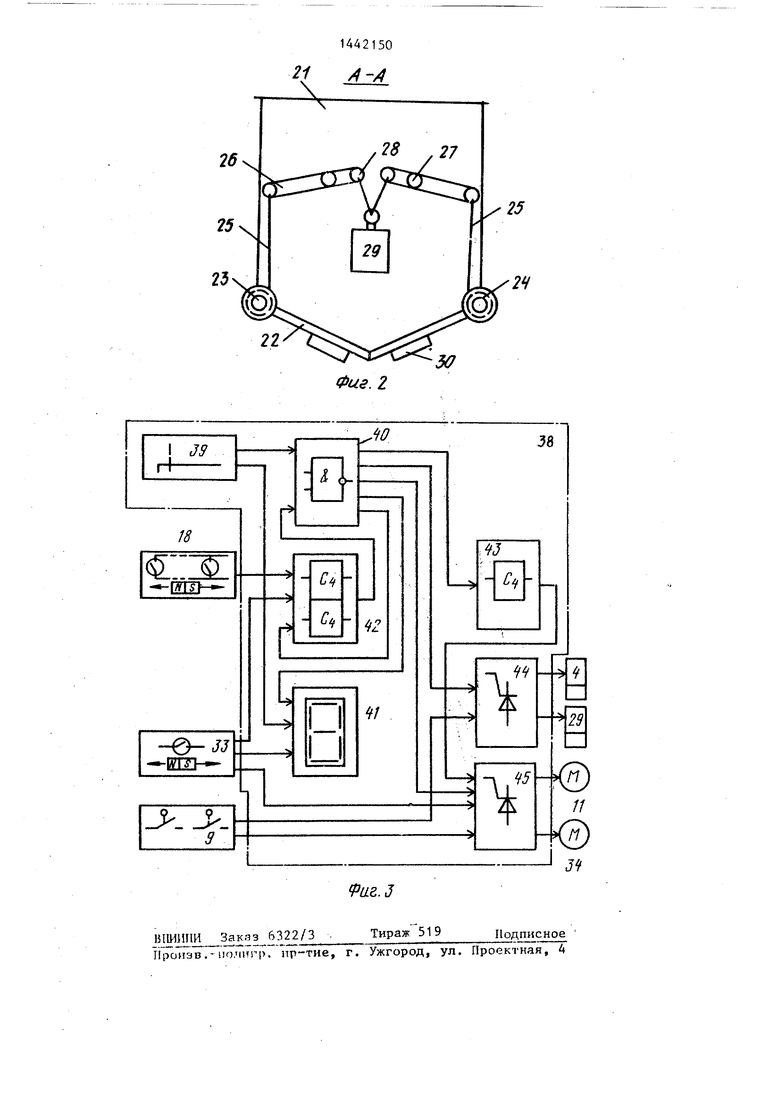
На фиг.1 показано устройство для дозированного кормления животных, общий вид; на фиг.2 - сечение А-А на фиг.1; на фиг.З - блокг:схема системы автоматического управления.
Устройство для дозированного кормления животных состоит из взаимосвязанных между собой питателя, .дозатор и кормушки.
Питатель кормов представляет собо шнековый транспортер 1, предназначенный для обслуживания целого ряда кормомест. В зоне каждого кормоместа он оснащен выгрузным окном 2, перекрываемым подпружиненным шибером 3 под воздействием тягового электромагнита 4.
Под выгрузным окном 2 транспорте- ра 1 расположен дозатор, содержащий неравноплечее коромысло 5, опирающееся на нож 6 неподвижной призмы 7, По обе стороны ножа призма 6 имеет упоры 8, оснащенна датчиками 9 поло жения коромысла 5 в виде двух микропереключателей и жестко закрепленными ограничительными скобами 10. Последние охватывают сверху плечи коромысла 5 и ограничивают егр перемеще- ние. В зоне призмы 7 на коромысле 5
0
с кормом не превышает массу гайки- гири 15, после чего перекрывается окно 2 шибером 3 и створка 22 открывается. Порция кормов из бункера 21 самотеком поступает в кормовой отсек, расположенный под загрузочным окном 36, и поворотом лопастного барабана 32 порции корма перемещается из зоны загрузочного окна 36, После выгрузки порции корма из бункера 21 неравноплечее коромысло 5 вновь выходит из равновесия, и цикл загрузки следующего кормового отсека осуществляется аналогично. 1 з.п. ф-лы, 3 ил.
установлен малогабаритньй мотор-реуктор 11J который при помощи муфты
12соединен с винтовым валом 13. Вал с подшипниками установлен в перегородках 14, жестко закрепленных к линному плечу коромысла 5. На валу
13расположена подвижная гайка-гиря 15, которая своим нижним концом охватывает направляющую 16, расположенную параллельно валу 13 и закрепленную в перегородках 14. На гайке-гире 15 закреплен постоянный магнит, взаимодействующий с целым рядом герконов,
закрепленных с одинаковым шагом над валом 13 и параллельно ему на пластине 17. В совокупности постоянный магнит и герконы представляют собой датчик 18 массы порции корма. На перегородке 14 закреплен микровыключатель 19, отключающий мотор-редуктор 11 в исходном состоянии, а непосредственно на длинном плече коромысла 5 расположен противовес 20, предназначенный для первоначального уравновешивания неравноп-печих рычажных весов, На коротком плече коромысла подвешен весовой бункер 21. Последний имеет прямоугольную форму и скошенное с двух сторон днище в виде шарвирно подвешенных створок 22. При этом створки 22 жестко закреплены к валам 23, а последние при помощи подшипников - к бункеру 21. На выступаюших за пределы бункера концах валов 23 жестко закреплены ролики 24, которые при помощи тросов 25 соединены с
длинными плечами рычагов 26, закрепленных на торцовой стенке бункера 21 с возможностью поворота относительно осей 27. Короткие плечи рычагов 26 при помощи троса 28 связаны с сердечником тягового электромагнита 29, который также закреплен на торцовой стенке бункера 21, К створкам 22 с внешней стороны прикреплены противовесы 30, обеспечивающие раскрытие створок при отключении злектромагни- та 29.
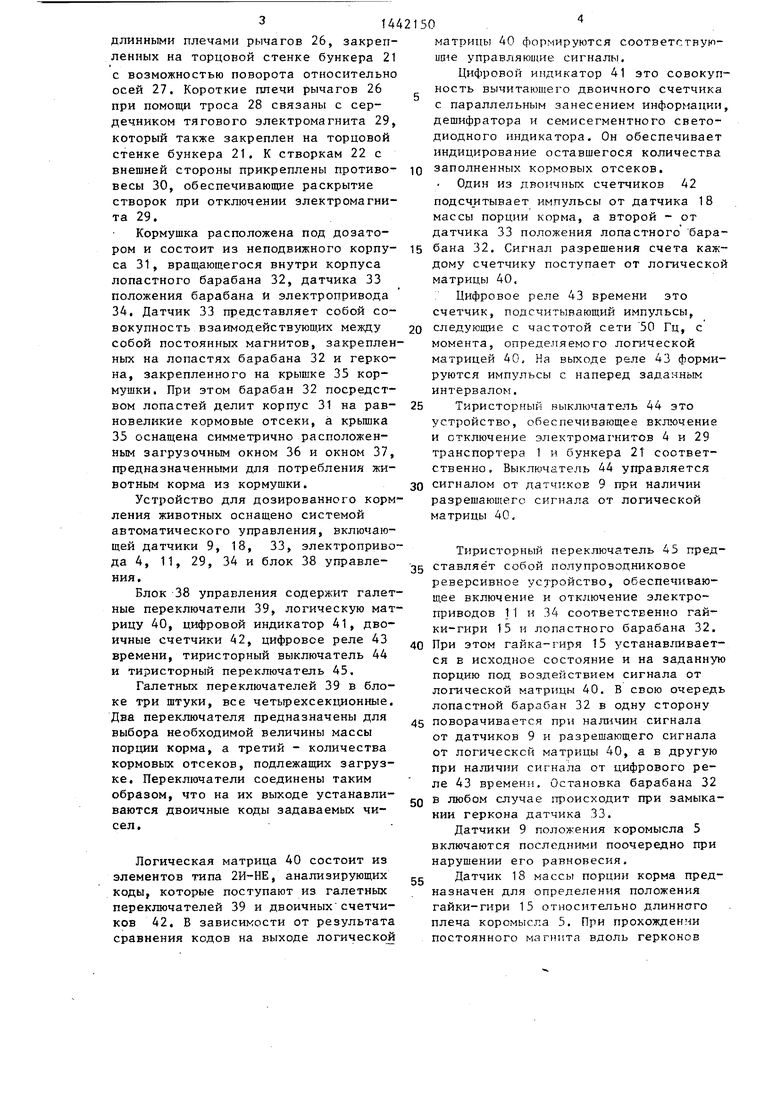
Кормушка расположена под дозатором и состоит из неподвижного корпуса 31, вращающегося внутри корпуса лопастного барабана 32, датчика 33 положения барабана и электропривода 34, Датчик 33 представляет собой совокупность взаимодействующих между собой постоянных магнитов, закрепленных на лопастях барабана 32 и герко- на, закрепленного на крышке 35 кормушки. При этом барабан 32 посредством лопастей делит корпус 31 на равновеликие кормовые отсеки, а 35 оснащена симметрично расположенным загрузочным окном 36 и окном 37, предназначенными для потребления животным корма из кормушки.
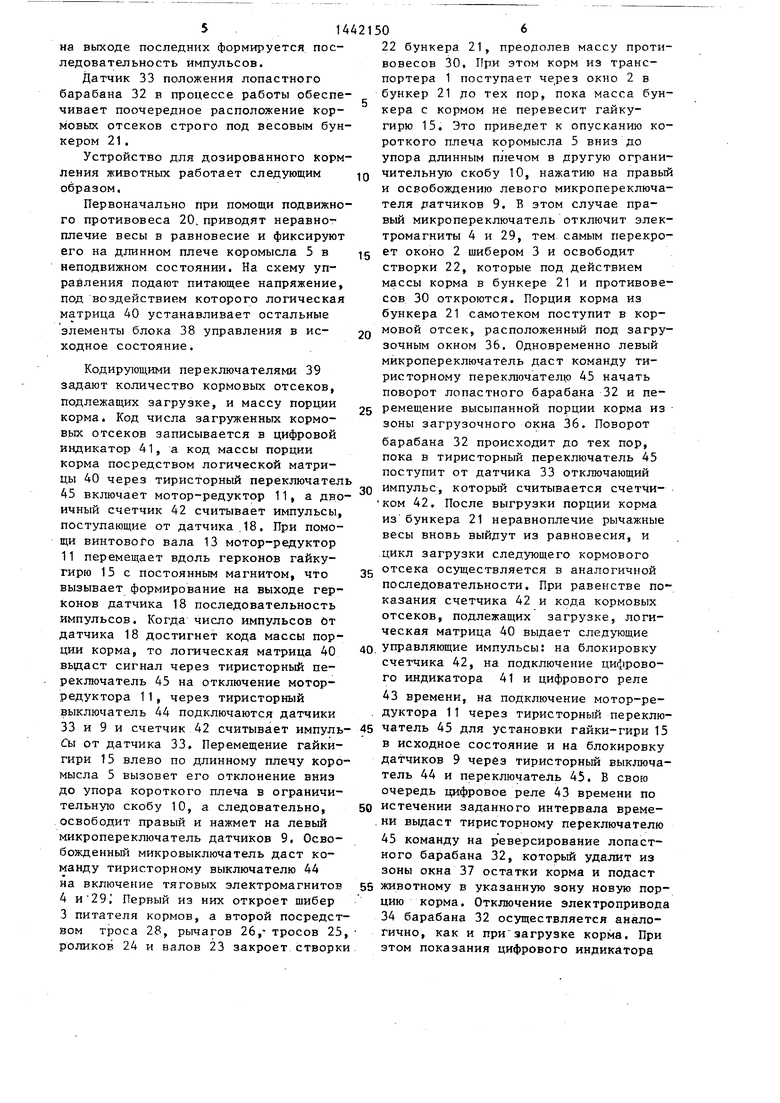
Устройство для дозированного кормления животных оснащено системой автоматического управления, включающей датчики 9, 18, 33, электропривода 4, 11, 29, 34 и блок 38 управления.
Блок 38 управления содержит галет ные переключатели 39, логическую матрицу 40, цифровой индикатор 41, двоичные счетчики 42, цифровое реле 43 времени, тиристорный выключатель 44 и тиристорный переключатель 45.
Галетных переключателей 39 в блоке три штуки, все четырехсекционные. Два переключателя предназначены для выбора необходимой величины массы порции корма, а третий - количества кормовых отсеков, подлежашзих загрузке. Переключатели соединены таким образом, что на их выходе устанавливаются двоичные коды задаваемых чисел .
Логическая матрица 40 состоит из элементов типа 2И-НЕ, анализирующих коды, которые поступают из галетных переключателей 39 и двоичных счетчиков 42, Б зависимости от результата сравнения кодов на выходе логической
0
0
5
матрицы 40 формируются соответг.твую- unie управляюише сигналы.
Цифровой индикатор 41 это совокупность вычитающего двоичного счетчика с параллельным занесением инфорьшции, дешифратора и семисегментного светодиодного индикатора. Он обеспечивает индицирование оставшегося количества заполненных кормовых отсеков.
Один из двоичных счетчиков 42 подсч итывает импульсы от датчика 18 массы порции корма, а второй - от датчика 33 положения лопастного бара5 бана 32. Сигнал разрешения счета каждому счетчику поступает от логической матрицы 40.
: Цифровое реле 43 времени это счетчик, подсчитывающий импульсы, следующие с частотой сети 50 Гц, с момента, определяемого логической матрицей 40, На выходе реле 43 формируются импульсы с наперед заданным интервалом.
Тиристорный выключатель 44 это устройство, обеспечивающее включение и отключение электромах нитов 4 и 29 транспортера 1 и бункера 2Т соответственно. Выключатель 44 управляется
0 сигналом от датчиков 9 при наличии разрешающего сигнала от логической матрицы 40с
Тиристорный переключатель 45 пред- 5 ставляёт собой полупроводниковое
реверсивное устройство, обеспечивающее включение и отключение электро- приводов 11 и 34 соответственно гайки-гири 15 и лопастного барабана 32. 0 При этом гайка-гиря 15 устанавливается в исходное состояние и на заданную порцию под воздействием сигнала от логической матрицы 40. В свою очередь лопастной барабан 32 в одну сторону 5 поворачивается при наличии сигнала от датчиков 9 и разрешающего сигнала от логической матрицы 40, а в другую при наличии сигнала от цифрового реле 43 времени. Остановка барабана 32 в любом случае происходит при замыкании геркона датчика 33.
Датчики 9 положения коромысла 5 включаются последними поочередно при нарушении его равновесия.
Датчик 18 массы порции корма предназначен для определения положения гайки-гири 15 относительно длинного плеча коромысла 5. При прохождении постоянного магнита вдоль герконов
0
5
на выходе последних формируется последовательность импульсов.
Датчик 33 положения лопастного барабана 32 в процессе работы обеспечивает поочередное расположение кормовых отсеков строго под весовым бункером 21 .
Устройство для дозированного кормления животных работает следующим образом.
Первоначально при помощи подвижного противовеса 20,приводят неравноплечие весы в равновесие и фиксируют его на длинном плече коромысла 5 в неподвижном состоянии. На схему управления подают питающее напряжение, под воздействием которого логическая матрица 40 устанавливает остальные элементы блока 38 управления в исходное состояние.
Кодирующими переключателями 39 задают количество кормовых отсеков, подлежащих загрузке, и массу порции корма. Код числа загруженных кормовых отсеков записывается в цифровой индикатор 41, а код массы порции корма посредством логической матрицы 40 через тиристорный переключатель 45 включает мотор-редуктор 11, а двоичный счетчик 42 считывает импульсы, поступающие от датчика. 18. При помощи винтового вала 13 мотор-редуктор 11 перемещает вдоль герконов гайку- гирю 15 с постоянным магнитом, что вызывает формирование на выходе герконов датчика 18 последовательность импульсов. Когда число импульсов йт датчика 18 достигнет кода массы порции корма, то логическая матрица 40 выдаст сигнал через тиристорный переключатель 45 на отключение мотор- редуктора 11, через тиристорный выключатель 44 подключаются датчики
10
22 бункера 21, преодолев массу противовесов 30. При этом корм из транспортера 1 поступает через окно 2 в бункер 21 до тех пор, пока масса бункера с кормом не перевесит гайку- гирю 15. Это приведет к опусканию короткого плеча коромысла 5 вниз до упора длинным плечом в другую ограничительную скобу 10, нажатию на правый и освобождению левого микропереключателя датчиков 9. В этом случае правый микропереключатель отключит электромагниты 4 и 29, тем самым перекро15 ет оконо 2 шибером 3 и освободит створки 22, которые под действием массы корма в бункере 21 и противовесов 30 откроются. Порция корма из бункера 21 самотеком поступит в кормовой отсек, расположенный под загрузочным окном 36. Одновременно левый микропереключатель даст команду ти- ристорному переключателю 45 начать поворот лопастного барабана 32 и пе25 ремещение высыпанной порции корма из зоны загрузочного окна 36. Поворот
барабана 32 происходит до тех пор, пока в тиристорный переключатель 45 поступит от датчика 33 отключающий импульс, который считывается счетчиком 42. После выгрузки порции корма из бункера 21 неравноплечие рычажные весы вновь выйдут из равновесия, и
цикл загрузки следующего кормового отсека осуществляется в аналогичной последовательности. При равенстве показания счетчика 42 и кода кормовых отсеков, подлежащих загрузке, логи20
30
35
ческая матрица 40 выдает следующие 40. управляющие импульсы; на блокировку счетчика 42, на подключение цифрового индикатора 41 и цифрового реле
43 времени, на подключение мотор-ре- . дуктора 11 через тиристорный переклю- 33 и 9 и счетчик 42 считывает импуль- 45 чатель 45 для установки гайки-гири 15 Сы от датчика 33. Перемещение гайки- в исходное состояние и на блокировку
гири 15 влево по длинному плечу коромысла 5 вызовет его отклонение вниз до упора короткого плеча в ограничительную скобу 10, а следовательно, освободит правый и нажмет на левый микропереключатель датчиков 9, Освобожденный микровыключатель даст команду тиристорному выключателю 44 на включение тяговых электромагнитов 4 и 29; Первый из них откроет шибер 3 питателя кормов, а второй посредством троса 28, рычагов 26, тросов 25, роликов 24 и валов 23 закроет створки
22 бункера 21, преодолев массу противовесов 30. При этом корм из транспортера 1 поступает через окно 2 в бункер 21 до тех пор, пока масса бункера с кормом не перевесит гайку- гирю 15. Это приведет к опусканию короткого плеча коромысла 5 вниз до упора длинным плечом в другую ограничительную скобу 10, нажатию на правый и освобождению левого микропереключателя датчиков 9. В этом случае правый микропереключатель отключит электромагниты 4 и 29, тем самым перекро5 ет оконо 2 шибером 3 и освободит створки 22, которые под действием массы корма в бункере 21 и противовесов 30 откроются. Порция корма из бункера 21 самотеком поступит в кормовой отсек, расположенный под загрузочным окном 36. Одновременно левый микропереключатель даст команду ти- ристорному переключателю 45 начать поворот лопастного барабана 32 и пе5 ремещение высыпанной порции корма из зоны загрузочного окна 36. Поворот
барабана 32 происходит до тех пор, пока в тиристорный переключатель 45 поступит от датчика 33 отключающий импульс, который считывается счетчиком 42. После выгрузки порции корма из бункера 21 неравноплечие рычажные весы вновь выйдут из равновесия, и
цикл загрузки следующего кормового отсека осуществляется в аналогичной последовательности. При равенстве показания счетчика 42 и кода кормовых отсеков, подлежащих загрузке, логи0
0
5
датчиков 9 через тиристорный выключатель 44 и переключатель 45. В свою очередь цифровое реле 43 времени по
истечении заданного интервала времени выдаст тиристорному переключателю 45 команду на реверсирование лопастного барабана 32, который удалит из зоны окна 37 остатки корма и подаст
животному в указанную зону новую порцию корма. Отключение электропривода 34 барабана 32 осуществляется аналогично, как и при загрузке корма. При этом показания цифрового индикатора
14
1 уменьшатся на единицу, а цифровое реле 43 времени вновь начнет отсчет заданного интерпала времени. В дальнейшем цикл подачи порции корма животному повторяется до тех- пор, пока показание цифрового индикатора 41 не станет равным нулю. После чего логическая матрица 40 переведет все остальные элементы блока 38 управле- ния в исходное состояние, и устройство ожидает дальнейшего поступления от галетных переключателей 39 исходных данных.
Предлагаемое устройство для дози- рованного кормления животных обеспечивает: заг рузку в кормовые отсеки разовой дачи корма дозированными частями, кормление подопытного животного через, определенные временные интерва- лы, количество и продолжительность которых могут изменяться оператором, раздельное и качественное удаление остатков кормов из каждого кормового отсека.
Кроме того, оно обеспечивает повышение точности проведения научных исследований по кормлению подопытных животных, а также устраняет их недокорм и перекорм, что в конечном счете ведет к экономии кормов и повышению оплаты кормов продукцией.
Формула изобретения
тель оснащен шибером с тяговым электромагнитом, бункер - поворотным лни- шем с электромагнитным приводом, а рычажные весы - датчиками конечного положения коромысла и датчиками массы порции корма, выполненными в виде ряда герконов, размещенных с определенным шагом на одном из плеч коромысла весов, с возможностью взаимодействия с магнитом, установленным на подвижном противовесе весов, при этом электроприводы кормушки, питателя, дозатора и датчики положения коромысла, многолопастного барабана, массы порции корма электрически связаны с соответствующими входами и выходами блока управления.
ный переключатель, тиристорный выключатель и галетные переключатели, соединенные с первыми входами цифрового индикатора и логической матрицы, второй вход которой соединен с выходом двоичных счетчиков, и при этом выходы логической матрицы связаны с вторым входом цифрового индикатора, входом цифрового реле времени и первыми входами дроичных счетчиков, ти- ристорного выключателя и тиристорного переключателя, второй, третий и четвертый входы последнего связаны с выходами цифрового реле времени, датчиком положения многолопастного барабана, датчиками положения коромысла, второй выход которого связан с вторым входом тиристорного выключателя, соответствующими выходами датчик положения многолопастного барабана подключен к третьему входу цифрового индикатора и второму входу двоичных счетчиков, с третьим входом которых связаны датчики массы порции корма.
22
Фие.2
и.г.3
И11ИЛ11И Закяз 6322/3 .Тираж 519Подписное
гПГоиз в 1о,. пр-тие, г. Ужгород, ул. Проектная, 4
| Dawson Т.Р., Turner M.I.В | |||
| А gravimetric feed dispenser for the dairy parlour | |||
| - J | |||
| Eng | |||
| Res., 1976, 21, № 4, 439-441. |
