Изобретение относится к поверхностям и структурам для захвата и передачи тягового усилия устройств, предназначенных, в частности, для крепления к обуви, перчаткам и инструментам, а более конкретно, к подошве обуви или перчатке улучшенной формы, имеющим очертания и конфигурацию стопы человеческой ноги или, соответственно, кисти человеческой руки.
Известно, что в данной области для захвата и передачи тягового усилия применяется поверхность, изготовленная из эластично деформируемого и сжимаемого материала, имеющая структуру разных очертаний и конструкций для повышения тягового усилия устройства, к которому она прикреплена, особенно к подошвам обуви, перчаткам и механическим захватывающим устройствам. До сих пор подошвы обуви включали в себя различные виды геометрических форм. В процессе ходьбы или бега анатомия босой человеческой ступни с ее многочисленными изгибами, контурами и выемками обеспечивает превосходное тяговое усилие и возможность захвата. Следовательно, необходимость в подошве, наружная поверхность которой очень сильно приближена к анатомическому строению человеческой ступни, очевидна. Предыдущие попытки обеспечить такую подошву оказались неудачными.
Заявитель знает о следующих патентах, относящихся к подошвам для обуви и стелькам. (см. табл. в конце текста).
Патент США на промышленный образец 247.832 представляет декоративную конструкцию в форме ступни для нижней части ботинка.
Патент США на промышленный образец 287.903 представляет собой декоративную конструкцию для подошвы ботинка, которая выглядит как лапа животного.
Патент США на промышленный образец 295.114 представляет еще одну декоративную конструкцию для подошвы ботинка.
Патент США на промышленный образец 309.670 представляет собой еще одну декоративную конструкцию для подошвы ботинка.
Патент США 3.402.485 относится к обуви, которая оставляет отпечатки, имитирующие следы животных, причем это устройство является составной частью подошвы.
Патент США 4.226.349 представляет монолитную подошву спортивного ботинка, которая включает в себя элементы по большей части круглой формы на участках, соответствующих подушечкам пальцев и пятки подошвы ботинка, что помогает повороту ступни. Эти круглые элементы приблизительно соответствуют анатомическому устройству человеческой ноги.
Патент США 4.697.361 представляет подошву обуви, изготовленную из эластично сжимаемого материала, который пружинит в ответ на приложение давления, оказываемого ступней человека, обутого в ботинок.
Остальные перечисленные патенты представляют схожие конструкции подошвы ботинка и включены для полноты информации.
Ближайшим аналогом заявленного изобретения является эргономическая поверхность захвата или передачи тягового усилия, которая включает основную поверхность, причем она дополнительно включает структуру устройства для захвата и передачи тягового усилия на основной поверхности, в котором имеется по меньшей мере один выступ, выходящий по высоте за пределы основной поверхности, описанный в патенте США N 4266349 A, кл. A 43 B 13/04, опубл. 1981 г.
Заявленное изобретение содержит следующее. Эргономическая поверхность захвата или передачи тягового усилия, которая включает основную поверхность, причем она дополнительно включает структуру устройства для захвата и передачи тягового усилия на основной поверхности, в котором имеется по меньшей мере один выступ, выходящий по высоте за пределы основной поверхности, при этом каждый выступ имеет пропорции конфигурацию и расположение, соответствующее неоднородным анатомическим характеристикам по меньшей мере участка поверхности конечности живого существа, а на его внешней контактирующей поверхности выполнено множество ребер, имеющих конфигурацию, имитирующую элементы кожи.
Указанная поверхность представляет собой кисть человеческой руки.
Указанная поверхность является соответствующей конечностью животного.
Указанная имитирующая кожа представляет собой человеческую кожу.
Указанные ребра расположены в основном в виде концентрических овалов, спиралей или завитков.
Каждый указанный выступ имеет внешние поверхности контакта, причем указанные поверхности контакта имеют множество выполненных на них ребер.
Указанные ребра расположены в конфигурации, имитирующей детали кожи.
Указанная имитируемая кожа представляет собой человеческую кожу.
Указанные ребра расположены в виде концентрических окружностей.
Каждый указанный выступ имеет внешние поверхности контакта, а указанные поверхности контакта имеют множество выполненных на них ребер.
Ребра расположены в конфигурации, имитирующей детали кожи.
Указанная имитируемая кожа представляет собой кожу животного.
Ребра расположены в виде концентрических окружностей.
Настоящее изобретение представляет собой основу эргономической конструкции поверхности для захвата и передачи тягового усилия. Настоящее изобретение представляет собой устройство, усиливающее захват или передачу тягового усилия предметов, к которым оно прикреплено или составной частью которых оно является, а именно: обуви, перчаток и механических захватов или устройств для передачи тягового усилия. Более конкретно, устройство представляет собой структуру для захвата и передачи тягового усилия, выполненную заодно с подошвой ботинка, которая имитирует отпечаток реальной человеческой ступни. Низ ступни представляет собой не плоскую поверхность, а комбинацию анатомических элементов разного размера, формы и очертания. Устройство в соответствии с настоящим изобретением отформовано как одно целое с эластично деформируемой и сжимаемой подошвой и включает в себя элементы и характеристики ступни человека. Подошва имеет множество выступов, которые выходят по высоте за основу подошвы, создавая таким образом прилегающие или углубленные участки. Выступы, соответствующие пяти пальцам ноги, и большие выступы, приблизительно соответствующие своду и пятке ступни, выполнены в соответствии с реальной анатомией человеческой ступни, в результате чего создаются выступы различной высоты. Эти выступы создают углубления, соответствующие участкам между пальцами ноги и позади них, а также другим углублениям отпечатка человеческой ступни. Эти углубления позволяют выступающим частям, соприкасающимся с землей, адекватно деформироваться в зависимости от силы, прикладываемой к подошве человеком, носящим обувь. Внешняя поверхность подошвы имеет мелкую ребристую структуру, приближающуюся к структуре кожи человеческой ступни, для увеличения тягового усилия.
В дополнение к этому изобретение может использоваться для внешних поверхностей захвата перчаток или механических захватывающих устройств. Поверхности ладоней и пальцев перчаток покрыты тонким, эластично деформируемым материалом, включающим в себя форму, очертания и другие характеристики отпечатка кисти человеческой руки. Настоящее изобретение предназначено не только для подошв и перчаток, которые косят люди, но также для производителей и пользователей движущегося автоматизированного оборудования, такого как роботы, где желательно тяговое усилие с захватом. В дополнение к этому концепция изобретения может быть расширена для создания устройств высокого качества с захватом и тяговым усилием для различного применения, такого как инструментальные захваты, протезы или любые другие аналогичные устройства.
Основной целью изобретения является повышение усилия захвата или тягового усилия объектов, составной частью которых оно является или к которым оно прикреплено, а именно: обуви, перчаток и механических захватов или устройств, передающих тяговое усилие.
Дальнейшая цель изобретения состоит в обеспечении структуры устройства для захвата и передачи тягового усилия для подошвы обуви, которая приблизительно соответствует форме и очертанию нижней части ступни.
Следующая цель изобретения состоит в обеспечении структуры устройства для захвата и передачи тягового усилия элемента подошвы ботинка, которая имеет ступенчатую структуру, обеспечивающую хорошую передачу тягового усилия.
Следующая цель изобретения состоит в обеспечении структуры устройства для захвата и передачи тягового усилия для подошвы ботинка, которая дает более комфортное и естественное ощущение человеку, носящему обувь.
Другой целью изобретения является обеспечение внешней поверхности перчатки, которая приблизительно соответствует форме и расположению человеческой кисти или лапы животного.
Дальнейшей целью изобретения является обеспечение структуры поверхности перчатки, имеющей характеристики, которые обеспечивают повышенную возможность захвата и более комфортное и естественное ощущение для человека, носящего перчатку.
Следующей целью изобретения является обеспечение структуры устройства для захвата и передачи тягового усилия, соответствующего анатомическому строению руки, ноги, лапы или схожего органа у любого живого существа.
Другой целью изобретения является обеспечение структуры поверхности, соответствующей анатомическому строению человеческой кисти, для использования в механических устройствах для захвата с целью увеличения передачи тягового усилия и возможности захвата.
Вышеупомянутая и другие цели станут более понятными при ссылке на следующее подробное описание и прилагаемые чертежи, в которых:
фиг. 1 - вид сверху подошвы ботинка в соответствии с настоящим изобретением,
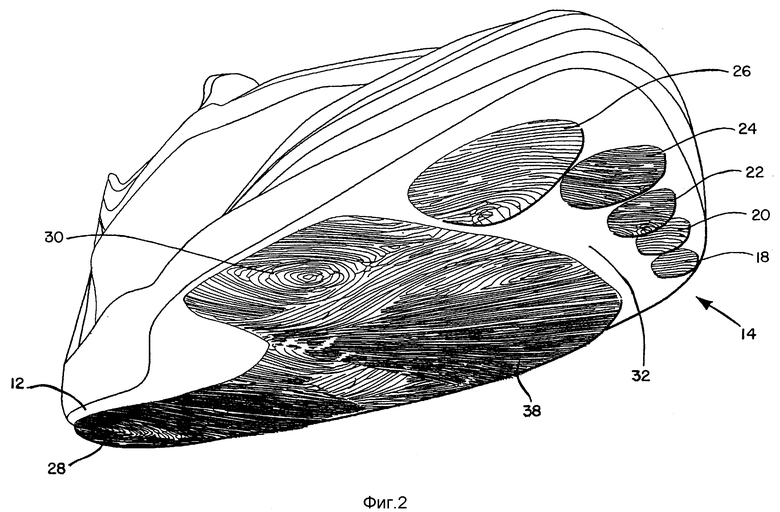
фиг. 2 - изометрическое изображение ботинка по фиг. 1, имеющего подошву, выполненную в соответствии с изобретением,
фиг. 3 - вид сбоку ботинка, представленного на фиг. 1, имеющего подошву, выполненную в соответствии с изобретением,
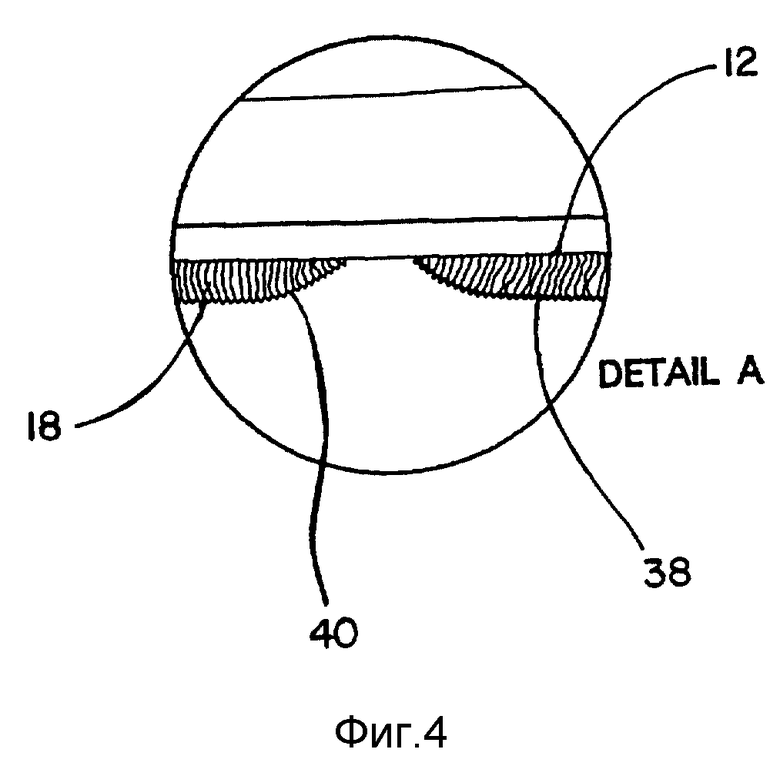
фиг. 4 - увеличенный вид сбоку части подошвы, изображенной на фиг. 3, на котором показана структура подошвы,
фиг. 5 - поперечное сечение подошвы по линии А-А на фиг. 1,
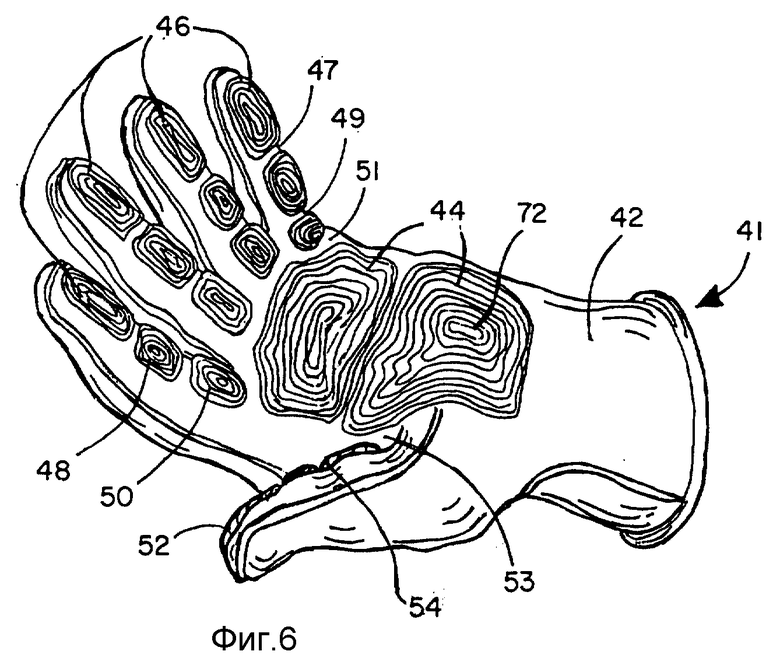
фиг. 6 - изометрическое изображение перчатки, имеющей структуру поверхности захвата по настоящему изобретению,
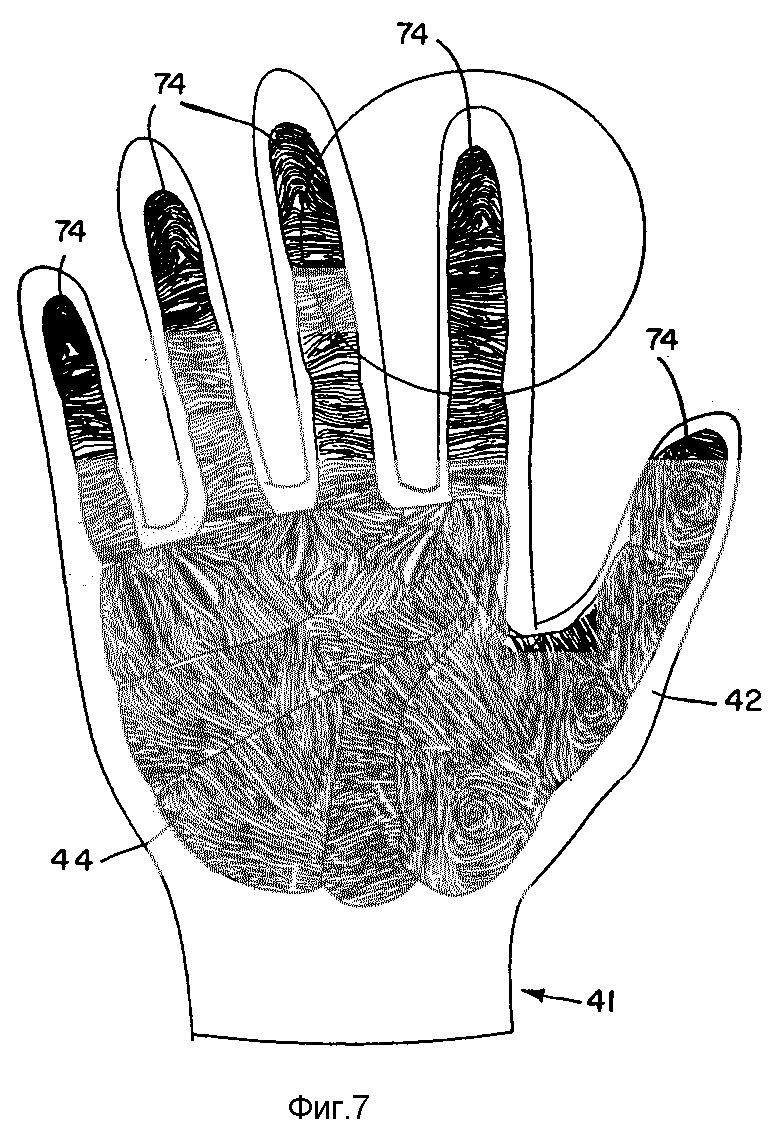
фиг. 7 - вид сверху перчатки с альтернативной структурой поверхности захвата в соответствии с настоящим изобретением,
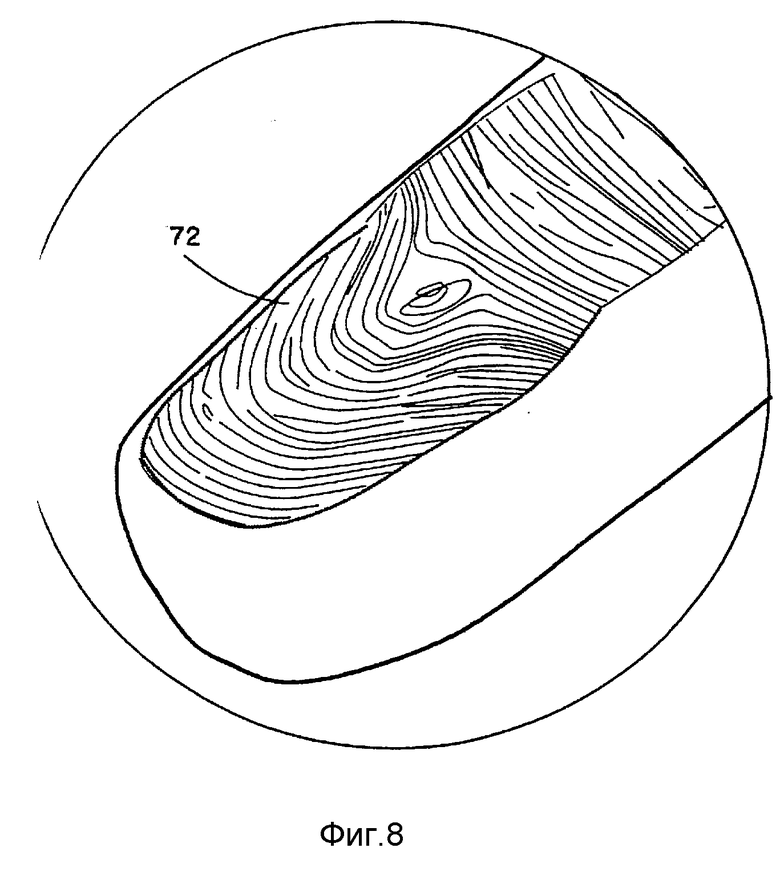
фиг. 8 - увеличенное изометрическое изображение участка пальца перчатки, на котором представлена структура поверхности перчатки;
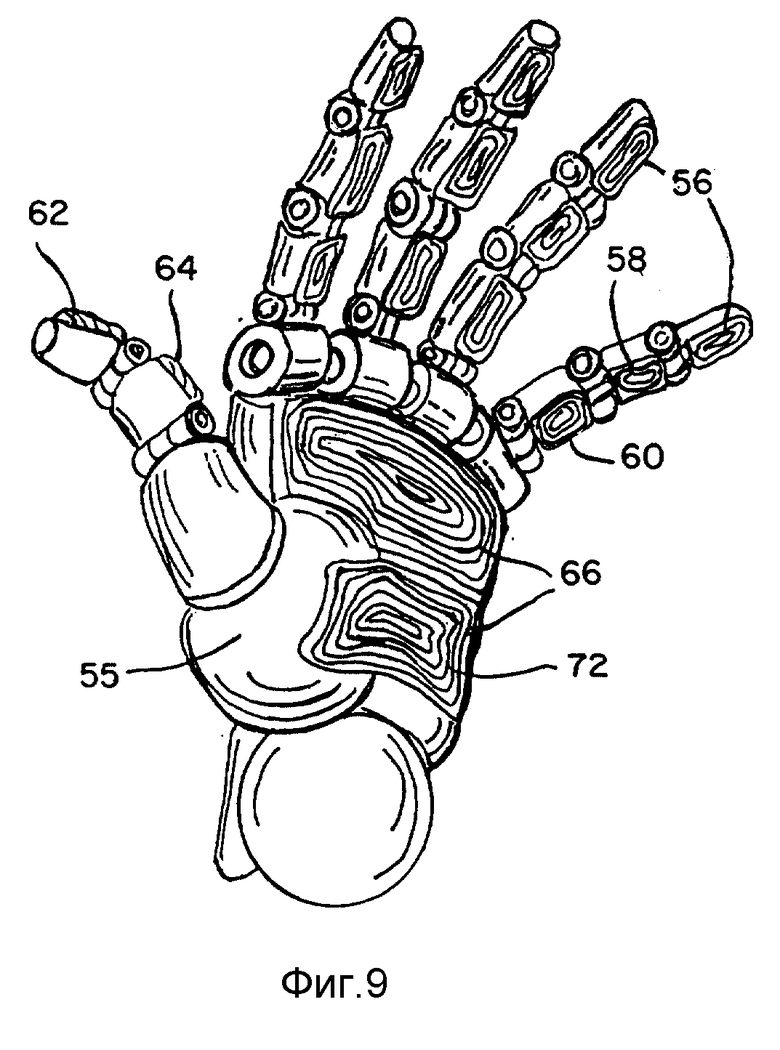
фиг. 9 - изометрическое изображение механического устройства, имитирующего человеческую руку, имеющего структуру поверхности захвата в соответствии с настоящим изобретением,
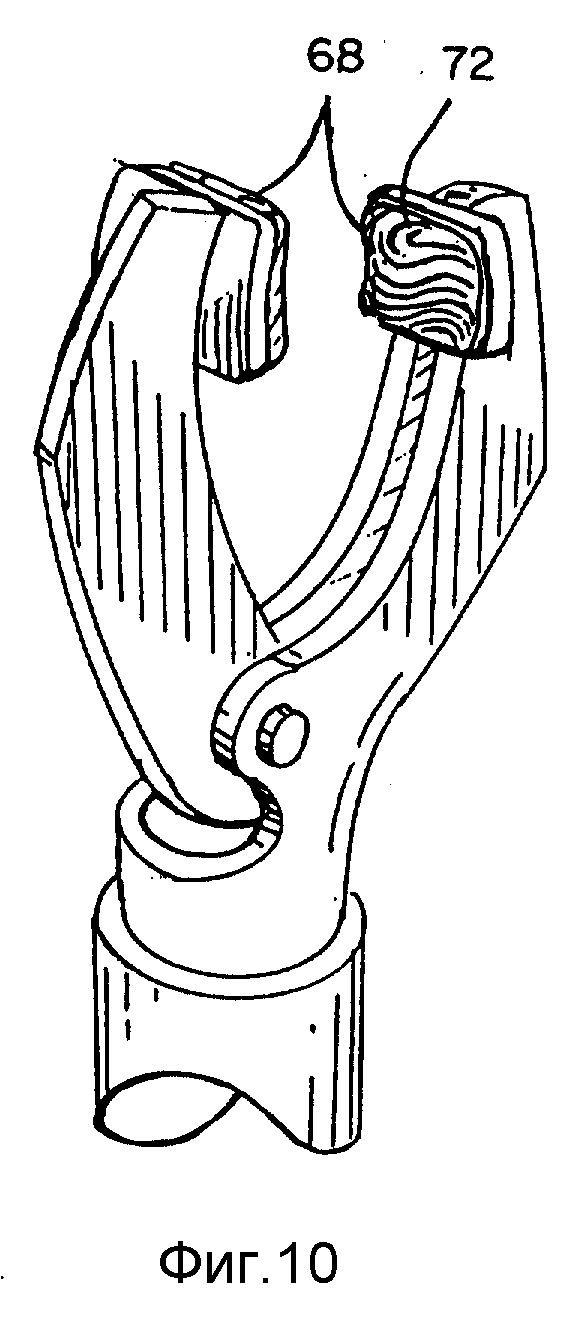
фиг. 10 - изометрическое изображение разновидности устройства для захвата, имеющего структуру поверхности захвата в соответствии с настоящим изобретением.
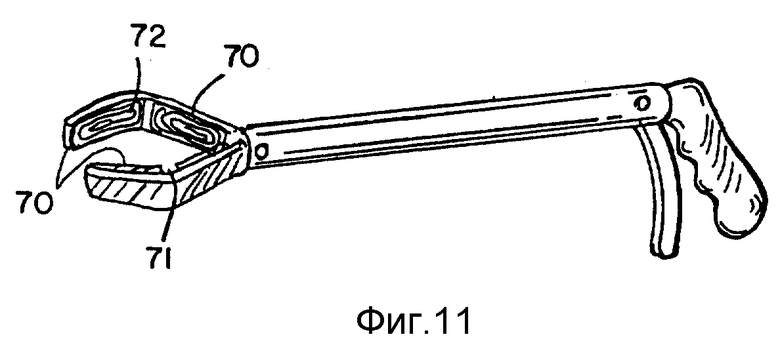
фиг. 11 - изометрическое изображение другого механического устройства для захвата в соответствии с настоящим изобретением,
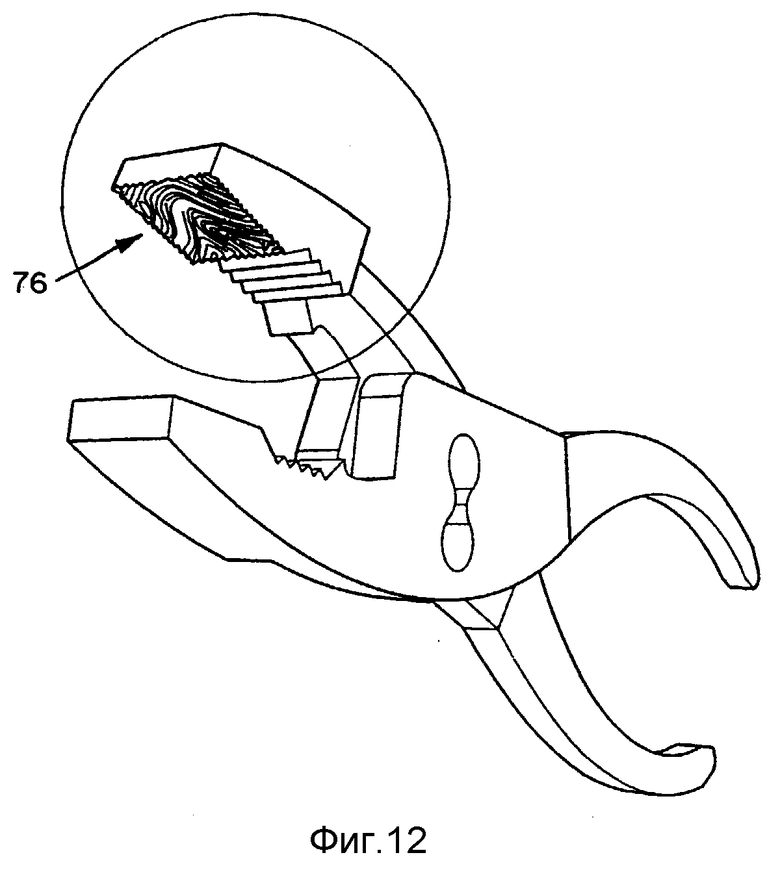
фиг. 12 - изометрическое изображение еще одного механического устройства для захвата в соответствии с настоящим изобретением,
фиг. 13 - увеличенное изометрическое изображение участка механического устройства для захвата, изображающее структуру поверхности (укрупненно).
Эргономическая поверхность захвата или передач тягового усилия представлена, например, в виде подошвы обуви.
На фиг. 1, 2 и 3 представлена подошва ботинка 10, изготовленная из эластично деформируемого материала. Подошва имеет основную поверхность 12, которая является в основном гладкой и плоской с передним участком 14, соответствующим области пальцев на подошве, и с задним участком 16, соответствующим области каблука подошвы. Выступы подошвы 18, 20, 22, 24, 26, 28, 30 отлиты как единое целое с подошвой и выходят по высоте за пределы основной поверхности 12, имея при этом различную форму, контуры и высоту.
На фиг. 1 показаны пять выступов 18, 20, 22, 24, 26 в передней части подошвы 14, размер, форма и расположение которых соответствуют расположению подушечек пальцев человеческой ступни. Другие большие выступы 28, 30 охватывают значительную часть подошвы от области каблука до области подошвы, которая соответствует своду ступни.
Выступы не обязательно должны быть одинаковыми по высоте 24а, 28а, 30, на которую они выступают за пределы основной поверхности 12, как представлено на фиг. 5. Высота любого выступа меняется в соответствии с трехкамерной анатомией человеческой ступни. Изменение высоты выступа может также зависеть от соответствующей величины силы, приложенной к соответствующим областям подошвы во время ходьбы или занятиях спортом. Например, высота выступа 28а на каблуке больше, чем высота выступа 34а в подъеме. Это изменение высоты выступа, основанное на анатомическом строении ступни, приводит к тому, что в ряде участков на подошве выступов мало или их нет, а имеются щели и углубления 32, 36, как представлено на фиг. 1. Эти углубления 32, 36 соответствуют участкам человеческой ступни, которые не обязательно непосредственно контактируют с землей, когда человек стоит, например свод, а также участки между пальцами ног и позади них. Эти углубления на человеческой стопе, тем не менее, очень важны во время ходьбы и бега, потому что они позволяют пальцам плотно контактировать с землей или полом во время приложения силы при ходьбе, создавая таким образом хорошую передачу тягового усилия. Аналогично, углубления 32, 36 в подошве по изобретению позволяют выступам, соприкасающимся с землей, адекватно деформироваться в ответ на силу или давление, прилагаемые человеком, обутым в ботинок. Эта деформация также обеспечивает хорошую передачу тягового усилия и более естественное ощущение для человека, обутого в ботинок.
На фиг. 4 представлено увеличенное изображение внешней поверхности выступов 18, 38. Имеется множество маленьких ребер 40, выполненных как единое целое со всеми соприкасающимися с землей внешними поверхностями каждого выступа. Эти ребра имитируют характерный оттиск человеческой кожи. Эти ребра позволяют соприкасающимся с землей поверхностям эластично деформируемой подошвы лучше захватывать задействованную в ходьбе платформу, создавая таким образом хорошую передачу тягового усилия.
Наилучший вариант осуществления изобретения достигается в том случае, когда поверхность захвата и передачи тягового усилия является составной частью подошвы, которая выполнена из эластично деформируемого материала, обычно для ботинок, предназначенных для занятия спортом, такого как резина, ПВХ, полиуретан или любой подходящий синтетический пластичный материал.
Подошва, изготовленная методом литья или инжекционной формовки, крепится к верхней части ботинка, чтобы как единое целое включать все характеристики структуры устройства для захвата, включая основу, выступы, углубления и ребра.
Настоящее изобретение может использоваться не только для обуви, надеваемой людьми, но также применяться везде, где требуется захват с передачей тягового усилия, например, для перчаток, инструментов или анодных и ручных узлов автоматизированного оборудования или роботов. Продолжается разработка технологически усовершенствованного оборудования. Устройство для захвата и передачи тягового усилия по изобретению может прикрепляться к любому элементу устройства или оборудования, где желательна хорошая возможность захвата и передачи тягового усилия.
На фиг. 6-11 представлены другие варианты изобретения, включая использование выступов в форме кисти или пальца на поверхностях захвата перчаток или других устройств для захвата, таких как механические руки роботов, автоматизированное оборудование или инструменты для захвата.
На фиг. 12 и 13 представлено другое осуществление изобретения, применимое для поверхности захвата механического устройства. Устройство имеет ребра 78, выполненные непосредственно на поверхностях захвата 76, и не имеет выступов, выполненных на его поверхностях. Эти ребра 78 выполнены такой конфигурации, которая приближена к характерному оттиску человеческой кожи.
На фиг. 6 представлена перчатка 41 с основной поверхностью 42. Множество выступов, соответствующих форме и контуру ладони и пальцев человеческой руки, выходят по высоте за пределы основной поверхности 42. Выступы ладони 44 охватывают область поверхности перчатки, соответствующую человеческой ладони. На каждом из участков перчатки для четырех пальцев имеются отдельные и ясно различимые выступы 46, 48, 50, соответствующие трем сегментам каждого пальца человеческой руки, включающим фалангу и два сустава. Выступы 52 и 54, по форме и устройству подобные внутренней поверхности большого пальца человеческой руки, выходят в высоту за пределы основной поверхности 42 области большого пальца на перчатке.
Так как эти выступы отдельны и точно определены, промежутки 47, 49, 51, 53 создаются на участках поверхности перчатки между выступами. Эти промежутки позволяют перчатке правильно сомкнуться вокруг захватываемого предмета и дают возможность адекватной деформации деформируемых выступающих поверхностей, создавая при этом хорошую возможность захвата и передачи тягового усилия.
В качестве альтернативы выступы, выходящие за пределы основной поверхности 42 перчатки 41, могут не быть отдельными и точно определенными, но могут быть и сплошными, как показано на фиг. 7. Один большой выступ 74 выходит по высоте за пределы поверхности базы 42 перчатки 41. Этот выступ соответствует форме и очертаниям кисти человеческой руки. Внешняя поверхность выступа 74 имеет выполненные как единое целое выступы 72, которые расположены таким образом, что имитируют характеристики человеческой кожи. Аналогично, выступы, выходящие по высоте за пределы основной поверхности 12 подошвы ботинка 10, могут не быть отдельными и четко различимыми, но могут быть сплошными и включать один большой выступ, который приближается по размеру, форме и расположению к человеческой ступне.
На фиг. 9 представлена механическая рука, которая может быть использована с роботом или узлом автоматизированного оборудования. Выступы 56, 58, 60, выполненные из любого пригодного эластично деформируемого и сжимаемого материала, такого как материал для подошв ботинок для занятий спортом, и прикрепленные к механической руке клеящим веществом, выходят за пределы поверхности 55 механической руки. Эти выступы 56, 58, 60 соответствуют форме и расположению пальцев человеческой руки. Аналогично, выступы 66, соответствующие форме и размеру ладони, прикреплены к области ладони механической руки, а выступы 62, 64, приближающиеся к форме большого пальца человеческой руки, прикреплены к механической руке и выходят по высоте за пределы поверхности 55 механической руки.
На фиг. 11 показано механическое устройство для захвата с выступами 70, приближающееся по форме к человеческим пальцам и прикрепленное клеящим веществом к поверхности инструмента для захвата. Выступы, выполненные из любого пригодного эластичного деформируемого материала, не закрывают весь участок поверхности захвата, оставляя, таким образом, промежутки 71. Эти промежутки 71 обеспечивают правильное смыкание механизма захвата вокруг захватываемого предмета. На фиг. 10 показан другой механизм захвата. Поверхности захвата покрыты эластично деформируемым материалом 68 для создания требуемой возможности захвата.
На фиг. 6-11 показано, что на всех внешних поверхностях заодно с ними выполнено множество ребер 72. Эти ребра допускают адекватную деформацию эластичного материала, из которого сделаны выступы, когда сила приложена к их поверхностям, создавая, таким образом, хорошую возможность захвата и передачи тягового усилия. Эти ребра выполнены и расположены по рисунку, приближающемуся к завиткам, изгибам и петлям рисунка человеческой кожи.
Ребра 40, 72, выполненные на всех поверхностях захвата и передачи тягового усилия, не обязательно должны быть расположены равномерно на каждом выступе, а ребра не обязательно должны быть одинаковой ширины или глубины. В дополнение к вышесказанному эти ребра должны быть расположены таким образом, чтобы имитировать характеристики кожи любого живого существа, а не только кожи пациента.
Другое осуществление изобретения подразумевает расположение ребер на поверхностях захвата и передачи тягового усилия выступов в форме концентрических окружностей, концентрических овалов, спиралей или других геометрических конфигураций.
Аналогично, настоящее изобретение может предусматривать поверхности захвата и передачи тягового усилия и выступами, расположенными в соответствии с анатомическим строением руки, ноги, пальца, лапы, когтя или любого соприкасающегося с поверхностью органа любого живого существа. Далее материал, из которого изготовлено данное изобретение, не обязательно должен быть эластично деформируемым. Устройство для захвата и передачи тягового усилия может быть выполнено из любого материала, пригодного для использования с изделием, к которому оно будет прикрепляться; например, устройство для использования в подошве ботинка может быть изготовлено из кожи.
На основании вышеизложенного достаточно очевидно, что изобретена поверхность или структура, которые усиливают действие захвата изделия или передачу им тягового усилия тому предмету, вместе с которым они выполнены или к которому они прикреплены, а именно: обуви, перчаткам и механическим захватам или устройствам для передачи тягового усилия, и которые обеспечивают более естественное и комфортное ощущение их пользователю. Была также изобретена улучшенная поверхность для участка ботинка, перчатки или механического захвата, на котором осуществляется захват или передачи тягового усилия, которая обеспечивает высокую возможность захвата и естественное ощущение.
Необходимо понять, что предшествующее описание и отдельные примеры всего лишь иллюстрируют наилучшую форму воплощения изобретения и его принципы, и что различные модификации и дополнения к устройству могут быть сделаны специалистами в диапазоне идеи и объеме изобретения, которые вследствие этого будут ограничены только диапазоном прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПРИОЦЕПТИВНОЕ/КИНЕСТЕТИЧЕСКОЕ УСТРОЙСТВО И СПОСОБ | 2003 |
|
RU2343946C2 |
| УСТРОЙСТВО И СПОСОБ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ДВИЖЕНИЯ В ТЕПЛО | 2005 |
|
RU2372563C2 |
| ОБУВЬ С АККУМУЛИРОВАНИЕМ ЭНЕРГИИ | 2008 |
|
RU2380011C1 |
| ОБУВЬ С АККУМУЛИРОВАНИЕМ ЭНЕРГИИ, СОЗДАВАЕМОЙ ПРИ ДВИЖЕНИИ | 2008 |
|
RU2380995C2 |
| КОМПЛЕКС СРЕДСТВ ЗАЩИТЫ КОСМОНАВТОВ ОТ НЕГАТИВНОГО ВОЗДЕЙСТВИЯ НЕВЕСОМОСТИ | 2014 |
|
RU2571888C1 |
| ЗАЩИТНЫЙ ЭКРАНИРУЮЩИЙ КОМПЛЕКТ ОТ ПОРАЖЕНИЯ ЭЛЕКТРИЧЕСКИМ ТОКОМ ПРИ РАБОТАХ В ЗОНЕ НАВЕДЕННОГО НАПРЯЖЕНИЯ И ОТ ВОЗДЕЙСТВИЯ ЭЛЕКТРИЧЕСКИХ ПОЛЕЙ ПРОМЫШЛЕННОЙ ЧАСТОТЫ | 2013 |
|
RU2577659C2 |
| СИСТЕМА ДЛЯ УСТАНОВКИ БЛОКИРУЮЩЕГО СТОПУ ЭЛЕМЕНТА | 2019 |
|
RU2701260C1 |
| ПОДКЛАДКА ДЛЯ ПРЕДМЕТОВ ОДЕЖДЫ | 2018 |
|
RU2786167C2 |
| УСТРОЙСТВО ДЛЯ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ НАРУШЕНИЙ ЛОКОМОЦИИ (ВАРИАНТЫ) | 2005 |
|
RU2330640C1 |
| ГРАВИТАЦИОННАЯ ОБУВЬ (ВАРИАНТЫ) И ПРУЖИННЫЙ БЛОК | 2010 |
|
RU2417720C1 |




Структура устройства для захвата или передачи тягового усилия, предназначенного для использования на внешних поверхностях захвата обуви, перчаток, инструментов и тому подобного, которая обеспечивает повышение тягового усилия и более естественное ощущение. Эргономическая поверхность захвата или передачи тягового усилия, которая включает опорную поверхность, дополнительно включает структуру устройства для захвата и передачи тягового усилия на основной поверхности, в котором имеется по меньшей мере один выступ, выходящий по высоте за пределы основной поверхности. Каждый выступ имеет пропорции, конфигурацию и расположение, соответствующее неоднородным анатомическим характеристикам по меньшей мере участка поверхности конечности живого существа. На его внешней контактирующей поверхности выполнено множество ребер, имеющих конфигурацию, имитирующую элементы кожи. Конечность представляет собой или человеческую ступню, или кисть человеческой руки, или конечность животного. Данная эргономическая поверхность для захвата или передачи тягового усилия обеспечивает повышение усилия захвата или тягового усилия объекта, составной частью которого она является или к которому она прикреплена. 13 з.п.ф-лы, 13 ил.. 1 табл.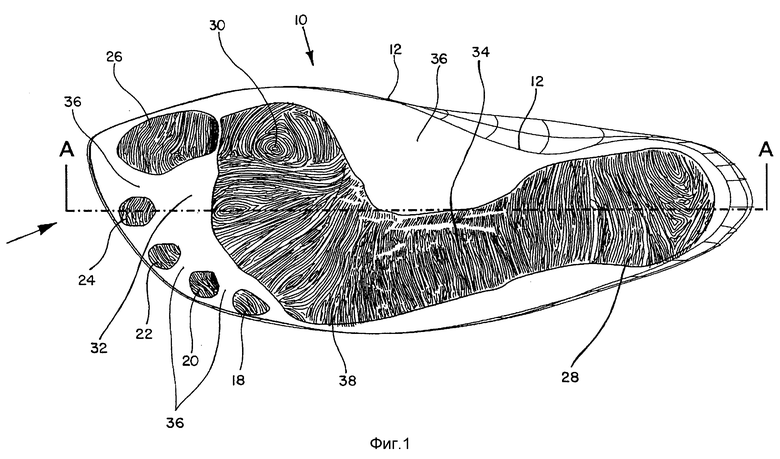
| US 4266349 A, 12.05.81 | |||
| СПОСОБ ПОЛУЧЕНИЯ ТКАНЕЙ ДИАГОНАЛЕВЫХ ПЕРЕПЛЕТЕНИЙ | 2009 |
|
RU2409714C1 |
| Коблякова Е.В | |||
| Основы проектирования рациональных размеров и форм одежды | |||
| - М.: Легкая и пищевая промышленность, 1984, с | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Конструирование изделий из кожи | |||
| -М.: Легкая и пищевая промышленность, 1982, о | |||
| Пуговица | 0 |
|
SU83A1 |
| Кочеткова Т.С., Ключникова В.М | |||
| Антропологические и биомеханические основы конструирования изделий из кожи | |||
| - М.: Легпромбытиздат, 1991, с | |||
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
| Устройство для захвата и подачи в зону обработки объемного изделия | 1982 |
|
SU1094606A1 |
| Захват | 1973 |
|
SU515637A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
| - М.: ЦНИИтекмаш, 1979 | |||
| US 3402485 A, 24.09.68 | |||
| US 4697361 A, 06.10.87. | |||

