Изобретение относится к области электронной техники и может быть использовано для диагностирования разветвленных электронных цепей.
Известно устройство для проверки электронных схем [1], которое состоит из блока управления, эталонного генератора, коммутатора, устройства сравнения, системы индикации и позволяет обеспечивать непрерывный допусковый контроль ста параметров с сигнализацией об уходе любого из них за установленные допуски. При этом на экране видеоконтрольного устройства формируется информация о текущих значениях контролируемых параметров с указанием их принадлежности о допусковых границах и номерах параметров, вышедших за поле допуска. Однако использованный здесь режим функционального диагностирования (пассивный эксперимент) не позволяет минимизировать процедуру диагностирования: так, в указанном устройстве для контроля по ста параметрам необходимо иметь сто полюсов съема информации с объекта диагностирования. К тому же контролируется отклонение того или иного параметра, но не выявляется та структурная единица объекта диагностирования, в результате нарушения работоспособности которой произошло отклонение данного параметра.
Указанная проблема идентификации места дефекта частично разрешается в устройстве для проверки электронных схем с пробником и датчиком контактного типа [2], состоящем из блока управления, эталонного генератора, коммутатора, устройства сравнения, системы индикации и пробника, работающего по принципу воздействие - отклик, в котором пробник передает сигналы в проверяемую схему и воспринимает выдаваемые схемой напряжения для дальнейшего анализа. При помощи этого устройства, в отличие от аналога, уже можно однозначно идентифицировать место дефекта, в результате которого произошло отклонение того или иного параметра.
Однако количество полюсов съема информации для однозначной идентификации места дефекта в данном устройстве остается большим.
Целью предлагаемого изобретения является минимизирование количества полюсов съема информации и времени диагностирования сложных электронных схем при сохранении возможности контролировать работоспособность всех структурных единиц объекта диагностирования.
Указанная цель достигается тем, что устройство для проверки электронных схем, состоящее из блока управления, эталонного генератора, коммутатора, устройства сравнения, системы индикации, щупа снабжено блоком оптимизации. Блок оптимизации подключен к блоку управления и электрически связан с щупом. Использование блока оптимизации позволяет путем съема информации всего с двух каналов объекта диагностирования однозначно идентифицировать нарушение работоспособности любой структурной единицы сколь угодно сложной разветвленной электронной цепи, а также определять степень работоспособности, фиксируя величину отклонения диагностируемого параметра от номинального значения.
На фиг. 1 представлена блок-схема устройства для проверки электронных схем; на фиг.2 показан пример выполнения; на фиг. 3 представлено семейство изовар.
Устройство для проверки электронных схем содержит блок управления (1), к которому подключены коммутатор (2) с эталонным генератором (3) и щупом (4), кроме того, к блоку управления подключены устройство сравнения (5), система индикации (6) и блок оптимизации (7).
Устройство работает следующим образом: блок оптимизации (71, работающий по программе реализации алгоритма поиска дефектов, выдает команду на запуск блока управления (1). Блок управления (1) выдает команду на коммутатор (2), и тестовый сигнал от эталонного генератора (3) через коммутатор (2) и щуп контактного типа (4) поступает на вход первого информативного канала объекта диагностирования. Необходимые для дальнейшего анализа напряжения снимаются с входа и выхода первого канала объекта диагностирования и через щуп (4) и коммутатор (2) подаются в блок оптимизации (7) для цифровой обработки, выполнения арифметических операций и хранения полученного кода модели от функции передач первого информативного канала.
Далее блок управления выдает одновременно команды на коммутатор (2), устройство сравнения (5), блок оптимизации (7). Тестовый сигнал от эталонного генератора (3) через коммутатор (2) и щуп (4) поступает на вход второго информативного канала объекта диагностирования. Необходимые для дальнейшего анализа напряжения снимаются со входа и выхода второго канала объекта диагностирования и после цифровой обработки выполнения арифметических операций и преобразования кода функции передач второго информативного канала в аналоговый сигнал соответствующего уровня поступают на вход устройства сравнения (5). Одновременно на вход устройства сравнения (5) с регистров памяти блока оптимизации (7) поступает аналоговый сигнал с уровнем, соответствующим коду модели от функции передач первого информативного канала. После сравнения этих уровней система индикации (6) выдает информацию о наличии в объекте диагностирования структурной единицы, имеющей отклонение параметра. Одновременно с устройства сравнения (5) подается команда на остановку в блок оптимизации (7). Если идентификация не наступает, то цикл многократно повторяется до наступления идентификации или ее отсутствия при множественных дефектах.
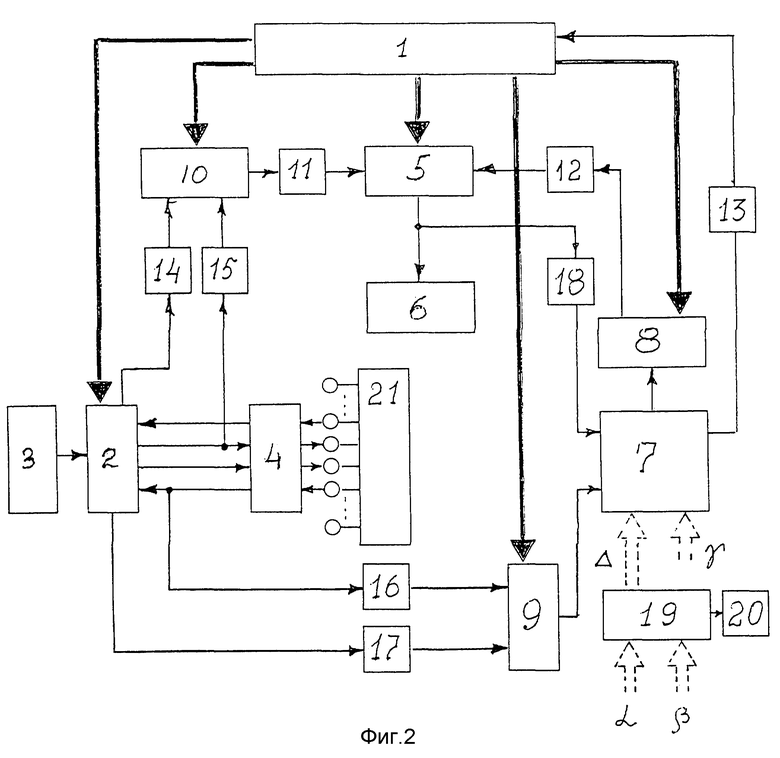
Устройство для проверки электронных схем может быть выполнено, например, как это показано на фиг. 2. Устройство состоит из блока управления (1), коммутатора (2), эталонного генератора (3), щупа (4), устройства сравнения (5), системы индикации (6), блока оптимизации (7), блока выдачи данных (8), арифметико-логического устройства АЛУ-1 (9), арифметико-логического устройства АЛУ-2 (10), цифроаналоговых преобразователей (11), (12), (13), аналого-цифровых преобразователей (14 - 18).
Динамика процесса диагностирования состоит в следующем: сначала на основе топологии и спецификации диагностируемой цепи с помощью ПЭВМ (19) фиг. 2 строится модель диагностирования, для этого в память машины вводятся исходная укороченная матрица узловых проводимостей диагностируемой цепи (α) и программа построения диагностической модели (β), согласно которой из множества функций передач, порождаемых матрицей узловых проводимостей и максимально возможных для диагностируемой n-полюсной цепи, пользуясь критерием чувствительности реагирования значений функций передач на изменение проводимостей всех структурных единиц, выбирают две наиболее чувствительные:
TMN = f(g1g2...gn) и TKP = f(g1g2...gn),
где ТMN, ТKP - функции передач от входа "M" к выходу "N" и от входа "K" к выходу "P" соответственно,
g1...gn - проводимости элементов схемы объекта диагностирования.
После выявления информативных полюсов блок индикации (20) выдает информацию о месте подключения щупа к объекту диагностирования.
Разработанная диагностическая модель (Δ) вводится в память блока оптимизации (7), туда же вводится программа диагностирования (γ), состоящая из двух подпрограмм: идентификации структурной единицы и определения ухода параметра за допустимые границы.
После запуска первой подпрограммы блок оптимизации (7) выдает команду на запуск блока управления (1). Блок управления работает в шеститактном режиме.
В течение первого такта блок управления выдает команду на коммутатор (2) и АЛУ-1 (9). Тестовый сигнал от эталонного генератора (3) через коммутатор (2) и щуп контактного типа (4) поступает на вход первого информативного канала объекта диагностирования (21). Необходимые для дальнейшего анализа напряжения снимаются со входа и выхода первого информативного канала и после цифровой обработки в АЦП (16), (17) поступает на вход АЛУ-1 (9). С выхода АЛУ-1 цифровой код функции передач поступает в блок оптимизации (7) для вычисления численного значения функции fn(TKP). Полученная информация поступает и хранится в регистрах памяти блока выдачи данных (8).
В течение второго такта блок управления выдает команду на коммутатор (2), АЛУ-2 (10), блок выдачи данных (8) и устройство сравнения (5). Тестовый сигнал от эталонного генератора (3) через коммутатор (2) и щуп контактного типа (4) поступает на вход второго информативного канала объекта диагностирования (21). Исследуемые напряжения снимаются со входа и выхода второго информативного канала и после цифровой обработки в АЦП (14), (15) поступают на вход АЛУ-2 (10). С выхода АЛУ-2 цифровой код функции передач TMN через ЦАП (11) поступает на устройство сравнения (5) и после сравнения с уровнем сигнала, поступающего одновременно с регистров памяти блока выдачи данных (8) (предварительно обработанного в ЦАП (12)), система индикации (6) либо регистрирует номер структурной единицы, имеющей отклонение параметра, что соответствует выполнению неравенства  , (где δ - абсолютная погрешность), и тогда реализация первой подпрограммы прекращается воздействием остановочного импульса с выхода устройства сравнения (5) через АЦП (18) на блок оптимизации (7), и запускается вторая подпрограмма определения ухода параметра за допустимые границы, либо отклонение параметра не регистрируется и первая подпрограмма продолжает производить перебор оставшихся неравенств
, (где δ - абсолютная погрешность), и тогда реализация первой подпрограммы прекращается воздействием остановочного импульса с выхода устройства сравнения (5) через АЦП (18) на блок оптимизации (7), и запускается вторая подпрограмма определения ухода параметра за допустимые границы, либо отклонение параметра не регистрируется и первая подпрограмма продолжает производить перебор оставшихся неравенств  на предмет соответствия до тех пор, пока не выйдет на выполняемое неравенство.
на предмет соответствия до тех пор, пока не выйдет на выполняемое неравенство.
Третий и четвертый такты управляют процессом контроля функции передач TKP. В течение третьего такта блок управления (1) выдает команду коммутатору (2) на перекоммутацию первого информативного канала на АЛУ-2 (10). Одновременно поступает команда на блок выдачи данных (8) и устройство сравнения (5). С блока выдачи данных (8) через ЦАП (12) на устройство сравнения (5) поступает информация о величине нижней границы области работоспособности функции TKP. После сравнения с уровнем сигнала, поступающего с АЛУ-2 (10), система индикации (6) регистрирует выполнение неравенства TKP>α (где α - нижняя граница области работоспособности) по нижней границе.
В течение четвертого такта производятся те же манипуляции, что и в третьем такте, но сравнение выполняется по верхней границе "b" области работоспособности функции TKP < b.
В течение пятого такта блок управления (1) выдает команду на перекоммутацию второго информативного канала на АЛУ-2 (10). Одновременно поступают команды на блок выдачи данных (8) и устройство сравнения (5). С блока выдачи данных (8) на устройство сравнения (5) поступает информация о величине нижней границы "с" области работоспособности функции TMN. После сравнения с уровнем сигнала, поступающего с АЛУ-2 (10), система индикации (6) регистрирует выполнение неравенства TMN > c по нижней границе.
В течение шестого такта производятся те же манипуляции, что и в пятом такте, но сравнение выполняется по верхней границе "d" области работоспособности функции TMN < d. После выполнения шестого такта блок управления (1) выдает импульс на переход системы в исходное состояние.
Таким образом, система при помощи всего двух обращений к объекту диагностирования однозначно регистрирует любой неисправный элемент схемы и указывает степень отклонения диагностируемого параметра от номинального значения.
В основу работы блока оптимизации положен процесс многократной последовательной проверки тождественности уравнений модели (Δ) при подстановке в них численных значений функций передач выбранных информативных каналов с целью поиска того единственного уравнения, которое соответствует отклонению величины параметра (вследствие нарушения работоспособности), исключенного из данного уравнения, а два значения функций передач выбранных информативных каналов обратят это уравнение в верное равенство (с учетом погрешности).
Для построения диагностической модели в выбранных функциях передач TMN = f(g1g2. ..gn) и TKP = f(g1g2...gn) фиксируются в соответствии с номинальными значениями проводимости элементов от g1 до gn-1 и получается система TMN = f(gn); ТKP = f(gn).
Из полученной системы исключается параметр gn и находится зависимость TMN = f(TKP), устанавливающая однозначное соответствие между множеством значений функций передач TMN и TKP и множеством возможных значений диагностируемого параметра gn (0<gn<∞).
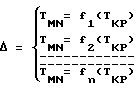
Все оставшиеся возможные корреляции достигаются аналогично последовательным исключением варьируемых параметров из системы TMN = f(g1g2...gn); TKP = f(g1g2...gn) В результате формируется модель, связывающая функции передач TMN и TKP при вариациях параметров всех структурных единиц на интервале (0,∞)
TMN = f1(TKP)
TMN = f2(TKP)
- - - - - -
- - - - - -
TMN = fn(TKP).
Полученная система функций в пространстве отобранных функций передач геометрически интерпретируется семейством изовар (гипербол), пересекающихся в общей точке, координаты которой соответствуют значениям TMN1 и TKP1 при отсутствии дефектов в диагностируемом устройстве фиг. 3.
При отклонении значения проводимости любой структурной единицы от номинала точка начинает движение по соответствующей изоваре, и неисправность может быть однозначно идентифицирована по принадлежности точки соответствующей изоваре.
Таким образом, предлагаемое устройство для проверки электронных схем позволяет путем двукратного съема информации с объекта диагностирования идентифицировать место дефекта и величину отклонения параметра в разветвленной цепи высокого порядка. Учитывая тот факт, что при ремонте электронных устройств большая часть времени (от общего времени ремонта) расходуется именно на определение места дефекта и степени работоспособности объекта диагностирования, экономический эффект, достигаемый при применении устройства очевиден.
Устройство для проверки электронных схем относится к области электронной техники и может быть использовано для диагностирования разветвленных электронных цепей. Устройство содержит эталонный генератор, соединенный через коммутатор с устройством сравнения и системой индикации, блок управления и щуп. Между блоком управления и коммутатором включен блок оптимизации, в который введены диагностическая модель и программа диагностирования, позволяющая путем съема информации с двух каналов электронной схемы идентифицировать нарушение работоспособности любой структурной единицы разветвленной электронной схемы. 3 ил.
Устройство для проверки электронных схем, содержащее эталонный генератор, соединенный через коммутатор с устройством сравнения и системой индикации, блок управления и щуп, отличающееся тем, что оно снабжено включенным между блоком управления и коммутатором блоком оптимизации, в который введена диагностическая модель и программа диагностирования, позволяющая путем съема информации с двух каналов электронной схемы идентифицировать нарушение работоспособности любой структурной единицы разветвленной электронной схемы.
| US 5315237 A, 24.05.94 | |||
| SU 915286 A, 23.07.82 | |||
| Способ обнаружения неисправных элементов электрической схемы | 1988 |
|
SU1624369A1 |
| Устройство для проверки электрических схем | 1989 |
|
SU1705771A1 |
