Устройство регулярно-периодического контроля работоспособности электрических средств автоматизации (ЭСА) относится к области электронной техники и может быть использовано для диагностирования судовых ЭСА.
Известно устройство для проверки электронных схем [1], которое состоит из блока управления, эталонного генератора, коммутатора, устройства сравнения, системы индикации и позволяет обеспечить непрерывный допусковой контроль ста параметров с сигнализацией об уходе любого из них за установленные допуски. При этом на экране видеоконтрольного устройства формируется информация о текущих значениях контролируемых параметров с указанием их принадлежности, о допусковых границах и номерах параметров, вышедших за поле допуска.
Однако используемый здесь режим функционального диагностирования не обеспечивает получения информации о месте возникновения дефекта.
Указанная проблема идентификации частично разрешается в устройстве для проверки электронных схем [2], состоящем из эталонного генератора, соединенного через коммутатор с устройством сравнения и системой индикации, блока управления, щупа и снабженного включенным между блоком управления и коммутатором блоком оптимизации, в который введены диагностическая модель и программа диагностирования, позволяющая путем съема информации с двух каналов электронной схемы однозначно идентифицировать нарушение работоспособности любой структурной единицы разветвленной электронной цепи. Однако, как правило, в таких структурах более вероятно возникновение множественных дефектов, которые одновременно не идентифицируются данным устройством.
Целью предлагаемого изобретения является минимизирование количества полюсов съема информации при контроле параметров всех структурных единиц с целью определения технического состояния объекта диагностирования (ОД).
Указанная цель достигается тем, что устройство регулярно-периодического контроля работоспособности ЭСА, состоящее из эталонного генератора, коммутатора, блока оптимизации устройства сравнения, системы индикации, снабжено блоком преобразования сигналов. Блок преобразования сигналов включен между блоком оптимизации и устройством сравнения. Использование блока преобразования сигналов позволяет путем съема информации с двух каналов ОД однозначно идентифицировать техническое состояние ОД.
На фиг. 1 представлена блок-схема устройства регулярно-периодического контроля работоспособности ЭСА, на фиг.2 показан пример выполнения, на фиг.3 представлен адаптационный процесс построения области работоспособных состояний, на фиг.4 изображена область работоспособных состояний ОД.
Устройство регулярно-периодического контроля работоспособности ЭСА содержит эталонный генератор (1), к которому подключен коммутатор (2). К блоку оптимизации (3) подключен блок преобразования сигналов (4), к которому подключено устройство сравнения (5). К устройству сравнения (5) подключен индикатор (6).
Устройство работает следующим образом. В начальный момент времени после запуска коммутатора (2) (кнопка "Пуск") напряжение от эталонного генератора (1) через коммутатор (2) подается на первый канал диагностирования ОД. Необходимое для дальнейшего анализа напряжение снимается с выхода первого канала диагностирования ОД и через коммутатор (2) поступает на первый канал блока оптимизации (3) для преобразования.
Далее напряжение от эталонного генератора (1) через коммутатор (2) подается на второй канал диагностирования ОД. Необходимое для дальнейшего анализа напряжение снимается с выхода второго канала диагностирования ОД и через коммутатор (2) поступает на второй канал блока оптимизации (3) для преобразования.
Дальнейшее запоминание, измерение и суммирование с выходным напряжением первого канала диагностирования выполняются в блоке преобразования сигналов (4).
Результирующее напряжение после суммирования и выпрямления в блоке преобразования сигналов (4) поступает на вход устройства сравнения для сравнения с заданным напряжением UR, величина которого определяет значение радиуса зоны работоспособных состояний ОД. После сравнения индикатор (6) выдает информацию о техническом состоянии ОД.
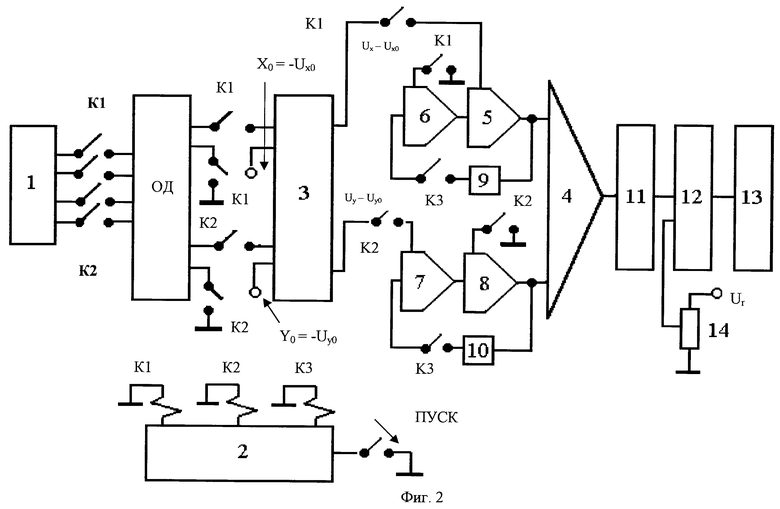
Устройство для проверки электронных схем может быть выполнено, например, как это показано на фиг.2.
Устройство состоит из эталонного генератора (1), коммутатора (2), блока оптимизации (3), блока преобразования сигналов, который содержит сумматор (4), четыре интегратора (5, 6, 7, 8,), два инвертора (9, 10) и амплитудный детектор (11). В состав устройства также входит устройство сравнения (12), индикатор (13) и регулятор (14).
Динамика процесса диагностирования состоит в следующем. После замыкания кнопки "Пуск" запускается коммутатор (2) и замыкаются все ключи К1. Ключи К2 и К3 остаются разомкнутыми. Напряжение от эталонного генератора (1) через коммутатор (2) подается на первый канал диагностирования ОД. Необходимое для дальнейшего анализа напряжение снимается с выхода первого канала диагностирования ОД и через коммутатор (2) поступает на первый канал блока оптимизации (3). Блок оптимизации (3) производит вычитание координаты Uxo - точки равновесного состояния из координаты точки текущего состояния Ux. Величина напряжения Uxo определяется из предварительного расчета.
Выход первого канала блока оптимизации подключен к интеграторам (5) и (6) измерительного блока, реализующим генерацию функции косинус с амплитудой, пропорциональной измеренной разности напряжений Ux-Uxo. Разностное напряжение Ux-Uxo заряжает входную емкость интегратора (6).
В следующий момент времени замыкаются все ключи К2. Ключи К1 размыкаются, а ключи К3 остаются разомкнутыми. Напряжение от эталонного генератора (1) через коммутатор (2) подается на второй канал диагностирования ОД.
Необходимое для дальнейшего анализа напряжение снимается с выхода второго канала диагностирования ОД и через коммутатор (2) поступает на второй канал блока оптимизации (3).
Блок оптимизации (3) производит вычитание координаты Uyo - точки равновесного состояния из координаты точки текущего состояния Uy. Величина напряжения Uyo определяется из предварительных расчетов.
Выход второго канала блока оптимизации (3) подключен к интеграторам (7) и (8) блока преобразования сигналов, реализующим генерацию функции синус с амплитудой, пропорциональной измеренной разности напряжений Uy-Uyo.
Разностное напряжение Uy-Uyo заряжает входную емкость интегратора (7).
В следующий момент времени коммутатор (2) замыкает все ключи К3. Ключи К2 размыкаются, ключи К1 остаются разомкнутыми. Вследствие замыкания ключей К3 через инверторы (9) и (10) образуется цепь обратной связи и происходит запуск генерации функций косинус и синус.
Сумматор (4) осуществляет сложение синусоидных и косинусоидных функций, обеспечивая векторное сложение с заданными амлитудами. Амплитудный детектор (11) обеспечивает получение уровня сигнала, численно равного амплитудному значению суммарного вектора.
Устройство сравнения (12) осуществляет операцию сравнения полученного уровня сигнала с опорным напряжением, задаваемым регулятором (14). Величина опорного напряжения задается исходя из расчетов радиуса области работоспособных состояний R, определяемого на основе предварительных расчетов.
После сравнения напряжений устройство сравнения (12) формирует на входе индикатора (13) сигнал. Если полученный на входе устройства сравнения (12) уровень сигнала превзойдет опорное напряжение, заданное регулятором (14), то произойдет срабатывание индикатора (13), что свидетельствует о выходе параметра хотя бы одной из структурных единиц за поле допуска.
При уровне сигнала на входе устройства сравнения (12), меньшем опорного напряжения, формируется сигнал, подтверждающий нахождение параметров всех структурных единиц в поле допуска. Коммутатор (2) выполняет управление устройством, в процессе которого при одиночном нажатии кнопки "Пуск" начинается генерация импульсных пакетов, содержащих по три сдвинутых во времени импульса. Это приводит к поочередному срабатыванию ключей K1, K2, К3, что обеспечивает выполнение всех этапов диагностирования. После срабатывания индикатора (13) запирающий импульс по линии обратной связи (А) приводит коммутатор (2) в исходное состояние.
Методика разработки диагностического обеспечения базируется на представлении ОД в виде неавтономного многополюсника с последующим представлением его в виде совокупности структурных единиц на основе метода изовар [2].
После построения области работоспособных состояний становятся известными координаты точки равновесного состояния Uxo и Uyo и величина UR=αR, которые используются как исходные данные, необходимые для диагностирования в автоматическом режиме с помощью рассматриваемого устройства.
Для построения области работоспособных состояний сначала на основе топологии и спецификации ОД с помощью ЭВМ строится модель диагностирования, для этого в память машины вводятся исходная матрица узловых проводимостей исследуемой электрической цепи и программа построения диагностической модели, согласно которой из множества функций передачи, порождаемых матрицей узловых проводимостей, пользуясь критерием чувствительности реагирования значений функций передачи на измерение параметров всех структурных единиц ОД, а также используя критерии равномерности чувствительности и эквидистатности, выбирают две наиболее оптимальные [2]
Kmn=F(g1,g2,...,gn); Kkp=F(g1,g2,...,gn),
где Kmn и Kkp - функции передачи от входа m к выходу n и от входа k к выходу p соответственно; g1,g2,...,gn - параметры структурных единиц объекта диагностирования.
После определения чувствительных каналов (к которым при диагностировании будет подключено устройство диагностирования), строится модель диагностирования, которая используется в дальнейшем для реализации процедуры адаптации построенной приближенной модели к реальным условиям, численным методам с помощью ЭВМ.
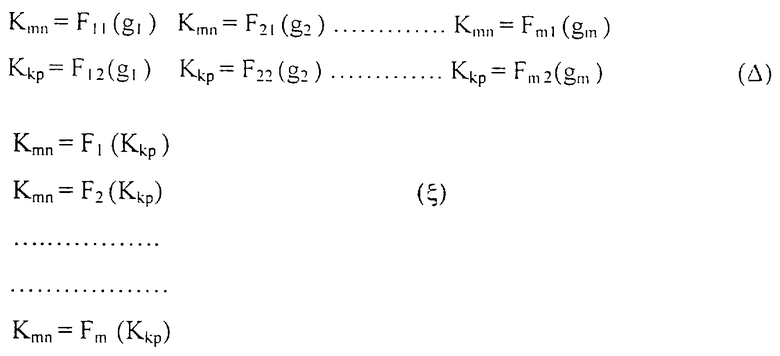
Диагностическая модель ((ξ)) строится методом исключения варьируемых параметров из системы Δ[2]
Kmn=F11(g1) Kmn=F21(g2)............Kmn=Fm1(gm)
Kkp=F12(g1) Kkp=F22(g2)............Kkp=Fm2(gm)7 (Δ)
Kmn=F1(Kkp)
Kmn=F2(Kkp) (ξ)
.........
.........
Kmn=Fm(Kkp)
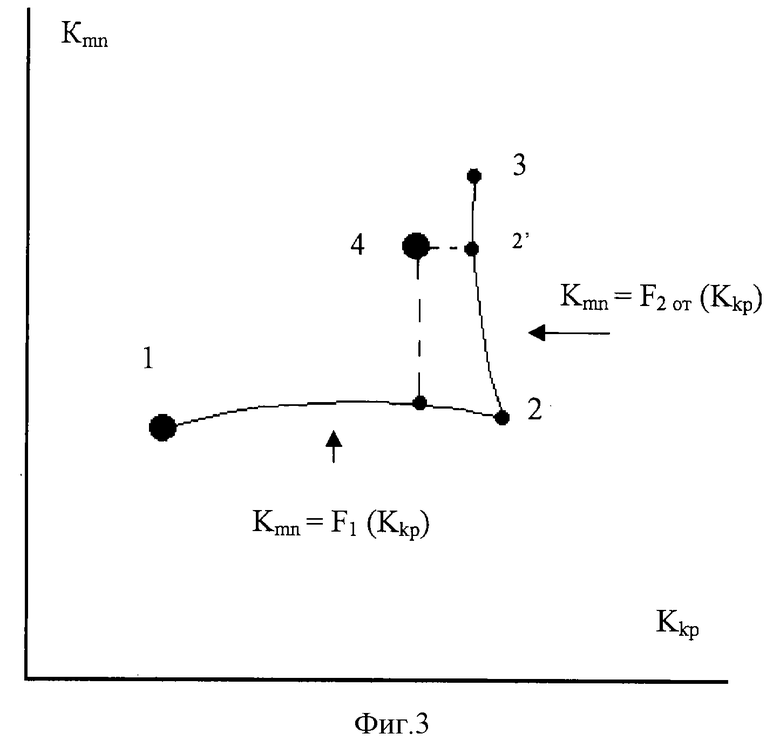
Основу метода адаптации составляет процесс постепенного приближения точки равновесного состояния приближенной модели к точке равновесного состояния уточненной модели в пространстве диагностирования {Kmn; Kkp} (фиг.3).
В качестве приближенной модели рассматривается аналитическая модель Δ, связывающая совокупность численных значений функций передачи двух выбранных каналов диагностирования (пространство диагностирования {Kmn; Kkp}) с множеством значений контролируемых параметров (поле контролируемых параметров gi;  ).
).
Координаты точки равновесного состояния уточненной модели определяются на реальном ОД измерением численных значений диагностических параметров Kmn и Kkp.
Координаты точки равновесного состояния приближенной модели вычисляются при подстановке в уравнение модели приближенных значений параметров структурных единиц.
Суть процесса коррекции состоит в следующем. Сначала первая система соотношений (Δ) исследуется по критерию минимального расстояния d при вариации параметра g1
где Kmnизм; Kkpизм - координаты точки равновесного состояния уточненной модели;
Kmn (gi); Kkp (gi) - текущие координаты точки равновесного состояния приближенной модели;
gi - варьируемый параметр, i=1, m.
Методами математического анализа (или численными методами при обработке данных на ЭВМ) выражение (1) исследуется на экстремум. Затем вторая и последующие системы (Δ) подлежат аналогичному преобразованию.
В результате проведенных преобразований становится известным вектор уточненных значений параметров структурных единиц объекта диагностирования gi (для определения параметров структурных единиц разработана программа).
Геометрически процесс можно интерпретировать как движение точки состояния в пространстве диагностирования (фиг.3). Аналитически процесс перехода точки состояния из положения 1 в положение 2 описывается соотношением
Kmn=F1(Kkp) при а≤gi≤b
i=k
где а - нижняя граница изменения параметра,
b - верхняя граница изменения параметра,
k - номер варьируемого параметра.
При вариации следующим параметром траектория перехода точки состояния из положения 2 в положение 3 описывается новым соотношением
Kmn=F2от(Kkp).
После вариации всеми m параметрами точка состояния займет положение 2' в пространстве диагностирования (фиг.3), близкое к точке равновесия уточненной модели (т.4).
Количество всевозможных маршрутов достижения конечного состояния определяется комбинаторно и составляет m!, где m - количество перемещений.
Выбор конкретного маршрута адаптации определяется порядком следования вариаций всеми m параметрами. Из всего множества вариантов выбирается маршрут наибольшего приближения к точке равновесия уточненной модели.
После выполнения процедуры адаптации становится известным вектор уточненных значений параметров всех структурных единиц объекта диагностирования, который сравнивается (покомпонентно) с вектором номинальных значений параметров структурных единиц, и определяется, какие из компонентов вышли за пределы установленных допусков.
Полученные результаты используются для построения области работоспособных состояний любого устройства, представляющего собой многокомпонентную разветвленную электрическую цепь высокой размерности.
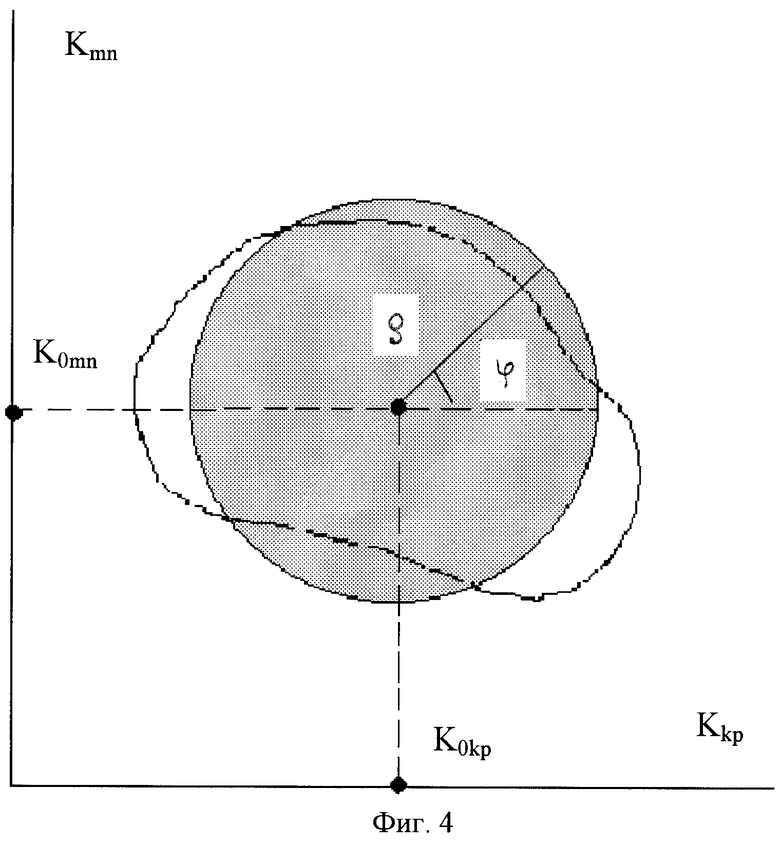
Для построения области работоспособных состояний в пространстве диагностирования {Kmn; Kkp} вводится полярная система координат
Kmn = Kmn0+ρcosϕ
Kkp = Kkp0+ρsinϕ
где Kmn0; Kkp0 - координаты точки равновесного состояния (состояние, соответствующее номинальным значениям параметров всех структурных единиц) объекта диагностирования;
ϕ - угол поворота радиуса ρ.
Задается шаг изменения Δ ϕ при различных значениях ρ. В пространстве диагностирования воспроизводится серия точек, подлежащих в дальнейшем процедуре адаптации. Для каждой точки полученной серии выполняется программа адаптации. Полученный после каждой адаптации вектор численных значений параметров всех структурных единиц сравнивается с заданным вектором допустимых значений параметров всех структурных единиц и, если разность одноименных координат этих векторов (хотя бы в одной компоненте) меньше допустимого Δgi, то точка зоны работоспособности выставляется в пространстве диагностирования. Если же эта разность больше допустимого Δgi, то точка не выставляется.
В результате перебора всех точек при изменении ρ и ϕ в установленных пределах образуется область допустимых значений диагностических параметров, при которых параметры структурных единиц остаются в допустимых пределах (фиг. 4). При выходе хотя бы одного из контролируемых параметров за допустимые пределы точка текущего состояния выйдет за пределы области работоспособности.
Полученная область работоспособности аппроксимируется усредненным значением радиуса R окружности области работоспособности. После вычисления численного значения радиуса R определяется величина опорного напряжения, подаваемого с регулятора (14) на устройство сравнения (12), согласно соотношения
UR = αR,
где α - коэффициент пропорциональности, определяемый параметрами регулятора (14) и устройства сравнения (12).
Рассчитанная при разработке диагностического обеспечения величина напряжений Uxo и Uyo выставляется на входах блока оптимизации (3).
В основу работы измерительного блока положен процесс измерения расстояния от точки текущего состояния до точки равновесного состояния в пространстве диагностирования {Kmn; Kkp}.
При подаче на вход диагностических каналов ОД единичного напряжения ко входам блока оптимизации (3) будут приложены напряжения, численно равные величине функций передачи каналов прохождения тестового сигнала ОД. Это дает возможность при дальнейших преобразованиях заменить численные значения коэффициентов передачи на численные значения напряжений Ux и Uy.
Координаты точки равновесного состояния Uxo и Uyo в пространстве диагностирования { Kmn; Kkp} (теперь его можно заменить на пространство {Ux; Uy}) определяются предварительно при построении области работоспособных состояний и вводятся в устройство диагностирования.
Описанные выше процессы суммирования и генерации имеют целью получение на выходе блока измерения (после преобразования в амплитудном детекторе (11)) постоянного уровня напряжения, соответствующего расстоянию точки текущего состояния от точки равновесного состояния в пространстве диагностирования { Ux; Uy} . Это напряжение в дальнейшем сравнивается в блоке сравнения (13) с напряжением UR, определяемым расстоянием между границей области работоспособности (аппроксимирующая окружность) и точкой равновесного состояния {Uxo; Uyo} в пространстве диагностирования.
Если параметр хотя бы одной из структурных единиц ОД выйдет за допустимые пределы, точка текущего состояния выйдет из области работоспособности, на что прореагирует индикатор (14).
Таким образом, предлагаемое устройство регулярно-периодического контроля работоспособности электрических средств автоматизации позволяет с помощью двукратного обращения к объекту диагностирования фиксировать выход параметра любой структурной единицы за установленные допуски.
Учитывая тот факт, что при эксплуатации электронных средств автоматизации информация о техническом состоянии компонент устройств имеет важное значение для предупреждения аварийных состояний объектов автоматики, экономический эффект, достигаемый при применении устройства, очевиден.
Источники информации
1. Авт. свид. СССР 915286 "Устройство для формирования сигналов контроля на телевизионном экране", авт. Калявин В.П., Корнильев О.П., Гурченко А.С.
2. Патент РФ 2137148 "Устройство для проверки электронных схем", авт. Пюкке Г.А., Портнягин Н.Н.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ЭЛЕКТРОННЫХ СХЕМ | 1997 |
|
RU2137148C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ЭЛЕКТРОННЫХ СХЕМ | 2000 |
|
RU2179729C2 |
| Устройство для отображения параметров импульса на экране осциллографа | 1984 |
|
SU1169011A1 |
| Устройство для диагностики объек-TOB | 1979 |
|
SU807306A1 |
| СПОСОБ ОЦЕНКИ ТОРМОЗНОЙ ЭФФЕКТИВНОСТИ И УСТОЙЧИВОСТИ АВТОМОБИЛЯ, ОБОРУДОВАННОГО АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ, СПОСОБ ОЦЕНКИ РАБОТОСПОСОБНОСТИ АНТИБЛОКИРОВОЧНОЙ СИСТЕМЫ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБОВ | 2008 |
|
RU2365516C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2153188C1 |
| УСТРОЙСТВО ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2024 |
|
RU2831917C1 |
| Устройство для моделирования центральных кривых второго порядка | 1990 |
|
SU1727141A1 |
| УСТРОЙСТВО ДИАГНОСТИРОВАНИЯ В РЕАЛЬНОМ ВРЕМЕНИ СИСТЕМЫ ЭЛЕКТРОДВИЖЕНИЯ СУДНА | 2010 |
|
RU2451299C1 |
| Способ определения технического состояния электрических и гидравлических приводов | 2022 |
|
RU2799489C1 |
Изобретение относится к области электронной техники и может быть использовано для диагностирования судовых электрических средств автоматизации. Техническим результатом является минимизирование количества полюсов съема информации при контроле параметров всех структурных единиц с целью определения технического состояния объекта диагностирования. Устройство содержит эталонный генератор, коммутатор, блок оптимизации, блок преобразования сигналов, устройство сравнения, индикатор. 4 ил.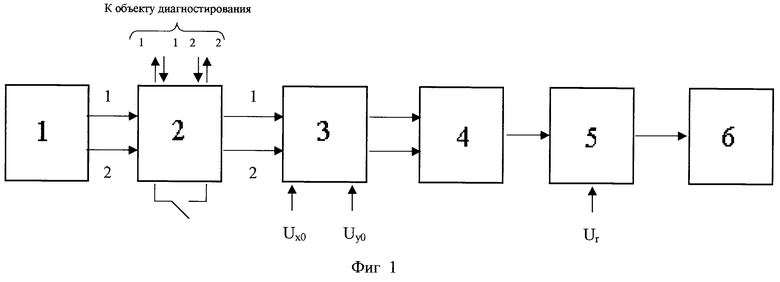
Устройство регулярно периодического контроля работоспособности электрических средств автоматизации, содержащее эталонный генератор, соединенный через коммутатор с блоком оптимизации, к блоку оптимизации подключено устройство сравнения, к устройству сравнения подключен индикатор, отличающееся тем, что оно снабжено включенным между блоком оптимизации и устройством сравнения блоком преобразования сигналов, предназначенным для суммирования выходных напряжений обоих каналов диагностирования объекта диагностирования.
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ЭЛЕКТРОННЫХ СХЕМ | 1997 |
|
RU2137148C1 |
| SU 915286 А, 23.03.1982 | |||
| Устройство для определения краевого угла смачивания | 1986 |
|
SU1394108A1 |
| Способ обнаружения неисправных элементов электрической схемы | 1988 |
|
SU1624369A1 |
| Устройство для проверки электрических схем | 1989 |
|
SU1705771A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДИАГНОСТИРОВАНИЯ ЦИФРОВЫХ УСТРОЙСТВ | 1994 |
|
RU2097827C1 |
| US 5325369 A, 28.06.1994 | |||
| СПОСОБ ПОЛУЧЕНИЯ БЕЛКОВОЙ КОРМОВОЙ ДОБАВКИ | 2000 |
|
RU2159287C1 |
