Область техники, к которой относится изобретение
Настоящее изобретение относится к области систем сотовой связи, в частности к системам, в которых определяется местоположение мобильной станции (МС, MS) сотовой связи.
Уровень техники
Для определения местоположения в сетях сотовой связи (например, в сети сотовой телефонии) существует несколько подходов к триангуляции на основе использования информации хронирования, передаваемой между каждой из нескольких базовых станций и мобильным устройством, например сотовым телефоном. Согласно одному подходу, именуемому «разность времен поступления» (РВП, TDOA), времена приема сигнала от мобильного устройства измеряются на нескольких базовых станциях, и эти времена передаются объекту определения местоположения, именуемому сервером определения местоположения, который вычисляет положение (позицию) мобильного устройства с использованием этих времен приема. Для этого подхода к работе нужно знать точные положения (позиции) базовых станций, и текущее время на этих базовых станциях должно быть скоординировано для обеспечения точного измерения местоположения. Координация по времени - это операция по поддержанию, в конкретный момент времени, текущего времени, связанного со множественными базовыми станциями, в заданных пределах ошибки.
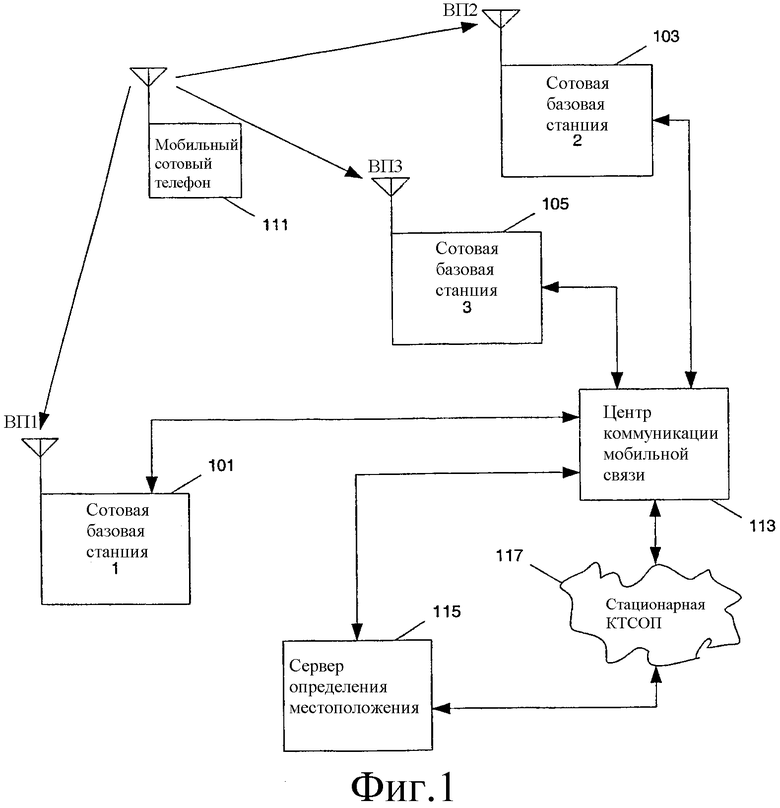
На фиг.1 показан пример системы РВП, в которой времена приема (ВП1, ВП2, и ВП3) одного и того же сигнала от мобильного сотового телефона 111 измеряются на сотовых базовых станциях 101, 103, и 105 и обрабатываются сервером 115 определения местоположения. Сервер 115 определения местоположения подключен для приема данных от базовых станций через центр 113 коммутации мобильной связи. Центр 113 коммутации мобильной связи обеспечивает сигналы (например, голосовую связь) на стационарную коммутируемую телефонную сеть общего пользования (КТСОП, PSTS) и от нее, что позволяет передавать сигналы с мобильного телефона на другие телефоны (например, телефоны стационарной сети КТСОП или другие мобильные телефоны) и обратно. В некоторых случаях, сервер определения местоположения может также отслеживать передачи нескольких базовых станций для определения относительного хронирования этих передач.
Альтернативный способ, именуемый «расширенная наблюдаемая разница по времени» (РНРВ, EOTD) или «расширенная трилатерация прямой линии связи (РТПЛ, AFLT), предусматривает измерение на мобильном устройстве времен поступления сигналов, переданных с каждой из нескольких базовых станций. Фиг.1 применима к этому случаю, если обратить направление стрелок ВП1, ВП2, и ВП3. Эти данные хронирования можно затем использовать для вычисления позиции мобильного устройства. Такое вычисление может производиться на самом мобильном устройстве или на сервере определения местоположения, если информация хронирования, полученная мобильным устройством, передается на сервер определения местоположения по линии связи. Опять же, текущее время на мобильных станциях должно быть скоординировано, и их местоположение должно быть точно определено. В каждом подходе, местоположение базовых станций можно определять стандартными геодезическими методами и хранить на базовых станциях, на сервере определения местоположения или в другом месте сети в компьютерной памяти того или иного типа.
Третий способ определения местоположения предусматривает использование в мобильном устройстве приемника глобальной спутниковой системы позиционирования (ГСП, GPS) или другой спутниковой системы позиционирования (ССП, SPS). Этот способ может быть полностью автономным или может осуществляться с использованием сотовой сети для обеспечения вспомогательных данных или для совместного использования при вычислении позиции. Примеры такого способа раскрыты в патентах США № 5841396; № 5945944 и № 5812087. Эти различные способы будем, в целом, именовать ССП. В конкретных недорогих реализациях приемник мобильной сотовой связи и приемник ССП объединены в одном корпусе и фактически могут совместно использовать общую электрическую схему.
Комбинация РНРВ или РВП с системой ССП называется «смешанной» системой.
Из вышеприведенного описания следует, что для систем РНРВ, РВП или гибридных систем координация по времени между различными сотовыми базовыми станциями необходима для точного вычисления позиции мобильного устройства. Требование к точности текущего времени на базовых станциях зависит от конкретного используемого метода позиционирования.
Согласно еще одному варианту вышеописанных способов находят двустороннюю задержку (задержку на прохождение сигналов в прямом и обратном направлениях) (ДСЗ, RTD) для сигналов, отправленных с базовой станции на мобильное устройство и вернувшихся обратно. Согласно аналогичному, но альтернативному способу, находят двустороннюю задержку для сигналов, отправленных с мобильного устройства на базовую станцию и вернувшихся обратно. Каждое из этих значений двусторонней задержки делят пополам, чтобы определить оценку односторонней задержки по времени. Зная местоположение базовой станции и одностороннюю задержку, можно ограничить местоположение мобильного устройства кругом на поверхности земли. Два таких измерения дают пересечение двух кругов, что, в свою очередь, ограничивает местоположение двумя точками на поверхности земли. Третье измерение (даже угол прихода или сектор соты) устраняет неопределенность. При использовании подхода двусторонней задержки важно, чтобы измерения ДСЗ были скоординированы, в худшем случае, с точностью до нескольких секунд, чтобы в случае быстрого движения мобильного устройства измерения соответствовали мобильному устройству, находящемуся примерно в одном месте.
Во многих случаях невозможно произвести измерения двусторонней задержки для каждой из двух или трех базовых станций, но только для одной базовой станции, которая является основной, осуществляющей связь с мобильным устройством. Например, это может быть в случае использования североамериканского стандарта сотовой связи МДКР IS-95. Или же может быть вовсе невозможно осуществить точные измерения двусторонней задержи (с точностью до долей микросекунды) вследствие ограничения оборудования или протокола сигнализации. Это возможно в случае использования стандарта GSM сотовой связи. В этих случаях, даже важнее поддерживать точное хронирование (или относительное хронирование) передач базовых станций, если нужно осуществлять операцию триангуляцию, поскольку используются только разницы по времени между разными путями от мобильного устройства до базовой станции.
Еще одной причиной для поддержания точной информации хронирования на базовых станциях является обеспечение времени для мобильных устройств в помощь вычислений позиции на основе GSM; и такая информация может приводить к уменьшению времени до первой фиксированной и/или повышенной чувствительности. Такие примеры содержатся в патентах США № 6150980 и № 6052081. Требуемая точность для этих случаев может варьироваться от нескольких микросекунд до примерно 10 миллисекунд, в зависимости от нужного повышения производительности. В смешанной системе хронирование базовых станций служит двоякой цели улучшения работы РВП (или РНРВ) и работы ГСП.
Подходы, отвечающие уровню техники, к координации хронирования предусматривают использование особых систем хронирования фиксированного местоположения, именуемых «модулями измерения местоположения» (LMU) или «модулями измерения хронирования» (TMU). Эти модули обычно включают в себя приемники ГСП фиксированного местоположения, которые позволяют определять точное текущее время. Местоположение модулей можно разведывать, например, с помощью оборудования разведки на основе ГСП. В альтернативных вариантах осуществления LMU или TMU могут не опираться на абсолютное время, обеспечиваемое приемником ГСП или другим источником, но просто опираются на хронирование одной базовой станции по отношению к другой базовой станции в дифференциальном смысле. Однако такой альтернативный подход (без использования приемника ГСП) опирается на возможность для одного объекта наблюдать множественные базовые станции. Кроме того, такой подход может обуславливать накопленные ошибки по сети.
Обычно, LMU или TMU наблюдают сигналы хронирования, например метки кадрирования, присутствующие в сигналах сотовой связи, передаваемых с базовых станций, и пытаются осуществить временное тегирование этих сигналов хронирования местным временем, найденным с помощью устройства ГСП или иного устройства определения времени. Затем можно отправлять сообщения на базовые станции (или другие компоненты инфраструктуры), которые позволяют этим объектам отслеживать истекшее время. Затем, по команде или периодически, можно отправлять по сети сотовой связи на мобильные устройства, обслуживаемые сетью, особые сообщения, указывающие текущее время, связанное с кадровой структурой сигнала. Это особенно просто в таких системах, как GSM, где полная кадровая структура длится в течение периода, превышающего 3 часа. Заметим, что модули измерения местоположения можно использовать в других целях, например, они могут действовать как серверы определения местоположения, т.е. LMU могут фактически осуществлять измерения времени поступления сигнала от мобильных устройств для определения положения мобильных устройств.
Одна проблема, связанная с подходом LMU или TMU, состоит в том, что они требуют создания нового специального стационарного оборудования на каждой базовой станции или в других местах в зоне покрытия нескольких базовых станций. Это может приводить к существенному удорожанию установки и обслуживания.
Сущность изобретения
Здесь описаны способы и устройства для частотной синхронизации базовых станций в системе сотовой связи.
Согласно одному аспекту изобретения способ прогнозирования хронирования передачи базовой станции в системе сотовой связи заключается в том, что принимают первый временной тег для первой метки хронирования в первом сигнале сотовой связи, переданном с базовой станции; принимают второй временной тег для второй метки хронирования во втором сигнале сотовой связи, переданном с базовой станции; и вычисляют частоту, связанную с базовой станцией, с использованием первого и второго временных тегов. Каждый из временных тегов определяют с использованием, по меньшей мере, одного сигнала спутниковой системы позиционирования, принятого на мобильной станции, которая также принимает соответствующую метку времени, содержащуюся в сигнале сотовой связи от базовой станции. В одном примере, соответствующем этому аспекту, временные теги определяют из сообщений текущего времени в спутниковых сигналах позиционирования. В другом примере, отвечающем этому аспекту, разницу по времени между, по меньшей мере, двумя временными тегами определяют на основании локальных опорных сигналов, частоты которых определяют путем обработки сигналов спутникового позиционирования.
Согласно другому аспекту изобретения способ измерения частоты, связанной с базовой станцией, заключается в том, что принимают на мобильной станции, по меньшей мере, один сигнал спутниковой системы позиционирования; определяют частоту опорного сигнала от гетеродина мобильной станции на основании, по меньшей мере, одного сигнала спутниковой системы позиционирования; принимают на мобильной станции сигнал сотовой связи от базовой станции, причем сигнал сотовой связи модулирует несущую; измеряют частоту несущей с использованием опорного сигнала гетеродина; и определяют частоту, связанную с базовой станцией, с использованием частоты несущей.
Настоящее изобретение предусматривает устройства, осуществляющие эти способы, включая системы обработки данных, осуществляющие эти способы, и машинно-считываемые носители информации, которые, при выполнении в системе обработки данных, предписывают системам осуществлять эти способы.
Другие признаки настоящего изобретения станут понятными из прилагаемых чертежей и из нижеследующего подробного описания.
Краткое описание чертежей
Настоящее изобретение проиллюстрировано в порядке примера, но не ограничения на фигурах прилагаемых чертежей, в которых сходные элементы обозначены сходными позициями.
Фиг.1 - пример сети сотовой связи, известной из уровня техники, в которой предусмотрено определение местоположения мобильного сотового устройства.
Фиг.2 - пример мобильной станции сотовой связи, которую можно использовать согласно настоящему изобретению и которая содержит приемник ГСП и приемопередатчик сотовой связи.
Фиг.3 - блок-схема комбинированной мобильной станции, которую можно использовать согласно настоящему изобретению и в которой приемник ГСП и приемопередатчик сотовой связи совместно используют общую схему.
Фиг.4 - пример сотовой базовой станции, которую можно использовать согласно различным вариантам осуществления настоящего изобретения.
Фиг.5 - пример сервера, который можно использовать согласно настоящему изобретению.
Фиг.6 - сетевая топология для измерения частот сигналов базовых станций согласно одному варианту осуществления настоящего изобретения.
Фиг.7 - кадровая структура сигналов сотовой связи GSM.
Фиг.8 - логическая блок-схема для определения частоты базовой станции согласно одному варианту осуществления настоящего изобретения.
Фиг.9 - детализация способа определения частоты сигналов базовой станции с использованием измерений периодов кадрирования сигналов базовой станции согласно одному варианту осуществления настоящего изобретения.
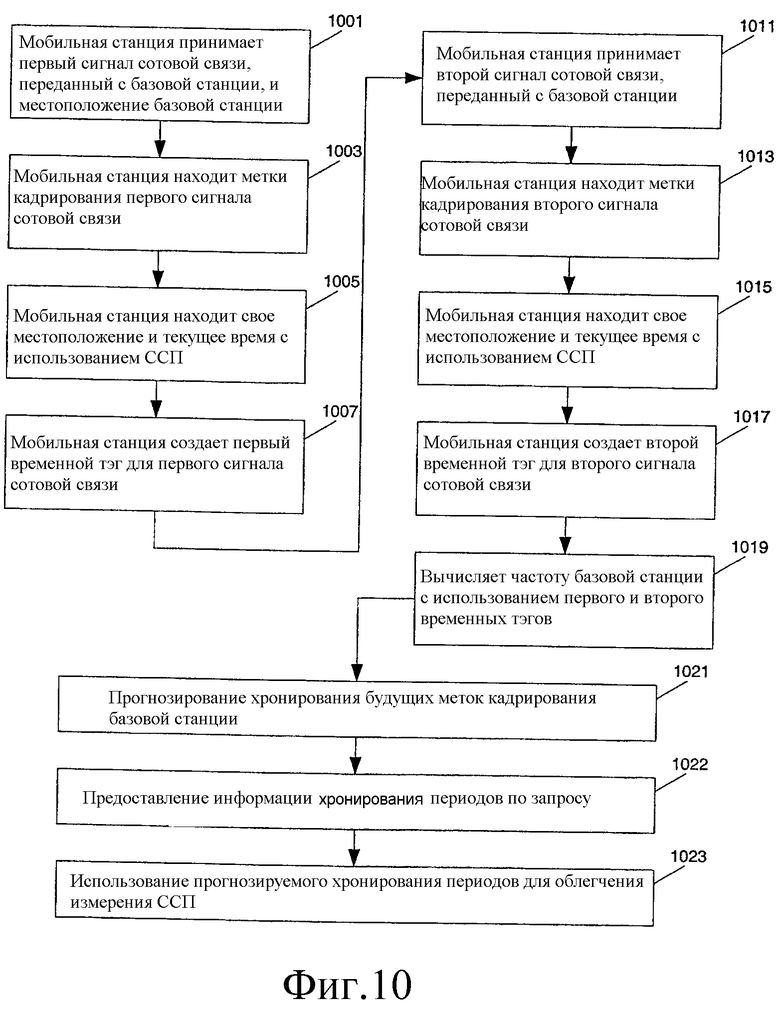
Фиг.10 - еще один способ определения частоты сигналов базовой станции с использованием измерений периодов кадрирования сигналов базовой станции согласно одному варианту осуществления настоящего изобретения.
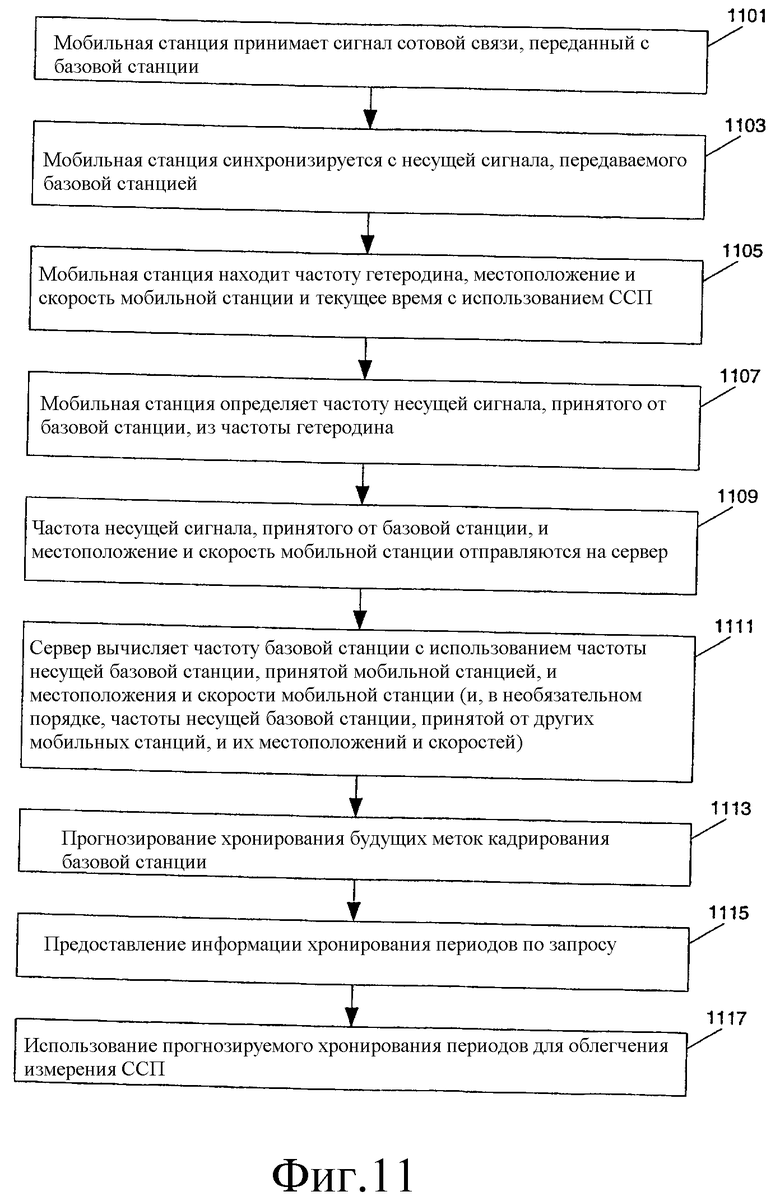
Фиг.11 - детализация способа определения частоты сигналов базовой станции с использованием измерений несущей частоты сигналов базовой станции согласно одному варианту осуществления настоящего изобретения.
Подробное описание
Нижеследующие описание и чертежи приведены для иллюстрации изобретения и не должны рассматриваться в плане ограничения изобретения. Многочисленные конкретные детали описаны для обеспечения полного понимания настоящего изобретения. Однако, в определенных случаях, общеизвестные или традиционные детали не описаны во избежание затемнения описания настоящего изобретения.
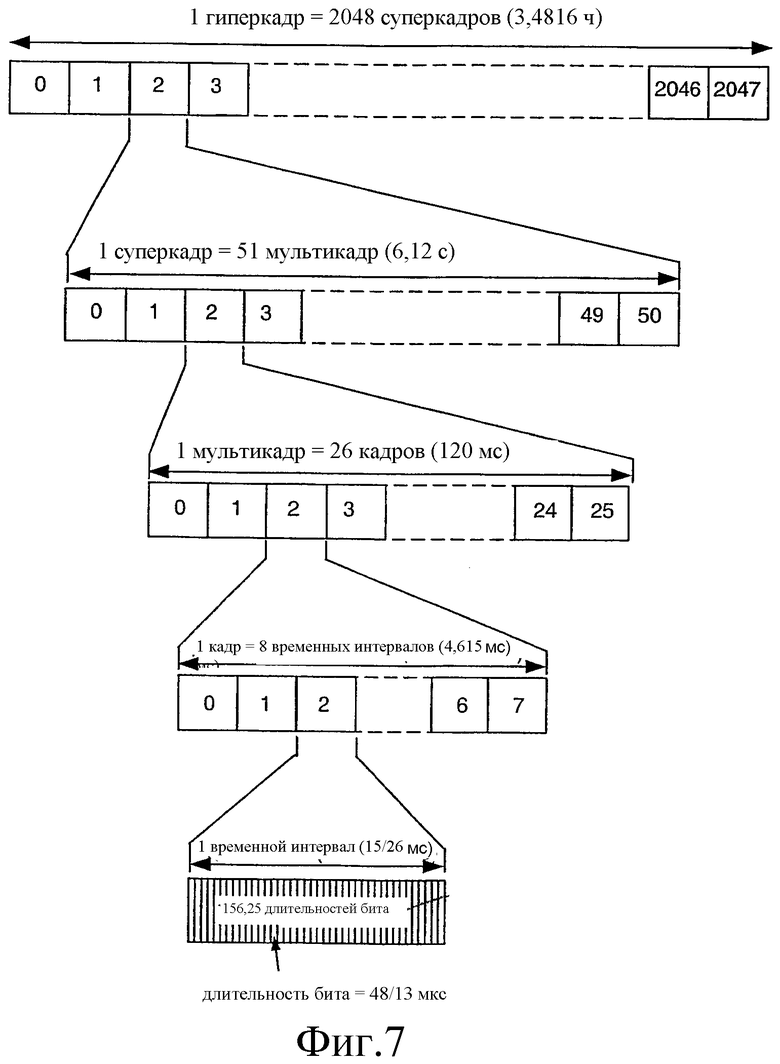
В большинстве цифровых сотовых систем нумерованные метки кадрирования передаются в составе передач сотовой системы. В такой сети, как GSM, информация текущего времени от приемника ГСП может использоваться для временного тегирования кадровой структуры (например, меток кадрирования) принимаемого сигнала связи (например, GSM). Например, можно использовать начало границы отдельного кадра GSM, которая наступает каждые 4, 6 миллисекунд (см. фиг.7). В гиперкадре, который длится 3,48 часа, имеется 2.715.648 таких кадров; поэтому каждая такая граница кадра является однозначной для всех практических целей. В совместно рассматриваемой патентной заявке США за номером 09/565,212, поданной 4 мая 2000 г., описан способ координации по времени, согласно которому мобильные станции (МС), содержащие приемники ГСП, используются для измерения как текущего времени, так и позиции с высокой точностью. Информация временных тегов сотовой структуры кадрирования, измеренная на мобильной станции, передается посредством обычной сигнализации сотовой связи на базовую станцию (БС) (например, сотовую базовую станцию, показанную на фиг.4) или другой сетевой объект (например, сервер или сервер определения местоположения) для определения текущего времени базовой станции. Задержку вследствие времени распространения от мобильной станции (МС) (например, мобильной станции сотовой связи, показанной на фиг.2) к базовой станции (БС, BS) можно определять (обычно на базовой станции или другом сетевом объекте) делением расстояния БС-МС на скорость света, поскольку мобильная станция определила свое положение с помощью блока ГСП, а базовая станция знает свое местоположение (например, благодаря разведке). Затем базовая станция может определить хронирование своей метки переданного кадра, просто вычитая расчетное время распространения из временного тега метки кадрирования, обеспеченного мобильной станцией.
С координацией по времени между базовыми станциями тесно связана частотная координация (или синхронизация) между базовыми станциями. Желательно, чтобы координация по времени, будучи установленной, поддерживалась в течение долгого периода времени. В противном случае, такую координацию пришлось бы выполнять часто, что привело бы к усложнению и удорожанию работы. Например, базовые станции могут координировать свое время, обмениваясь друг с другом сигналами по существующим каналам связи (например, каналам сотовой связи). Постоянная необходимость в такой сигнализации привела бы к растрате ценных ресурсов связи, которые можно использовать для передачи речевой информации и иных данных.
Во избежание частой координации по времени желательно иметь на каждой базовой станции точное измерение частоты первичного источника сигнала или, альтернативно, частоты источника базовой станции по отношению к источникам других базовых станций. Если частоты первичных источников сигнала базовых станций известны с высокой точностью, то текущее время на этих базовых станциях, после того, как оно скоординировано, можно поддерживать в течение продолжительного периода времени с использованием счетчиков интервалов времени.
По меньшей мере, один вариант осуществления настоящего изобретения предусматривает осуществление частотной координации между базовыми станциями. Способы, отвечающие настоящему изобретению, предусматривают использование обычных мобильных приемников сотовой связи, которые снабжены средствами позиционирования ГСП, без развертывания дорогостоящих стационарных сетевых ресурсов.
Один вариант осуществления настоящего изобретения предусматривает использование меток хронирования сотовой передачи (например, меток кадрирования) для частотной синхронизации. Измерение частот передачи меток кадрирования базовых станций используется для точной оценки расхождения между оптимальным и истинным хронированиями между последовательными метками кадрирования. Это расхождение можно экстраполировать вперед по времени как функцию номера метки с использованием стандартного алгоритма аппроксимации кривой. Таким образом, времена появления метки кадра можно использовать в качестве точных часов на протяжении долгого периода времени после получения начального хронирования метки кадра и получения хорошей оценки частоты метки кадра (или отклонения от номинальной частоты).
Еще один вариант осуществления настоящего изобретения предусматривает использование несущей частоты сотовых передач для частотной синхронизации. В большинстве случаев метки кадрирования и несущая частота сигнала сотовой связи от базовой станции синхронизируются с одним и тем же генератором опорного сигнала на базовой станции. Таким образом, путем простого математического расчета из несущей частоты сигнала сотовой связи можно получить метку кадрирования сигнала базовой станции.
Согласно, по меньшей мере, одному варианту осуществления настоящего изобретения частоту метки кадрирования переданной передатчиком базовой станции определяют для частотной координации. Однако метки кадрирования и символы сигнала (предполагается цифровая модуляция), а также частота несущей сигнала обычно синхронизируются с одним общим главным генератором (например, генератором 413 на фиг.4) в цифровой сотовой системе. В нескольких важных сотовых системах, в том числе в системе GSM, японской системе PDC и системе WCDMA (ШМДКР - широкополосная система множественная доступна с кодовым разделением каналов), частоту сигналов хронирования (например, метки кадрирования) и частоту несущей выводят из одного и того же основного генератора. Таким образом, точные измерения либо частоты передачи меток кадрирования (частоты символов), либо несущей частоты таких передач можно использовать для достижения одной и той же цели. Частоту несущей можно использовать, чтобы вывести частоту передачи и наоборот. Достоинства и недостатки измерения каждой из них связаны с деталями реализации и точностью измерений.
Согласно одному варианту осуществления одна или несколько мобильных станций производят одно или несколько измерений хронирования принятых сигналов базовой станции и передают эти временные теги и необязательную дополнительную информацию на сервер, который, в свою очередь, осуществляет вычисление частоты.
Согласно другому варианту осуществления одна или несколько мобильных станций измеряют частоту несущей принятых сигналов базовой станции и передают информацию о частоте несущей и необязательную дополнительную информацию на сервер.
Согласно еще одному варианту осуществления каждая из одной или нескольких мобильных станций производит, по меньшей мере, два измерения хронирования для принятых сигналов базовой станции, вычисляет меру частоты (или, эквивалентно, интервал времени) на основании этих измерений и передает меру частоты на сервер.
Согласно различным вариантам осуществления сервер может собрать последовательность данных от мобильных станций для осуществления дальнейшей обработки, чтобы лучше оценить частоту или чтобы осуществить операцию аппроксимации кривой зависимости этой частоты от времени.
Очевидно, что частоту передачи сотовой базовой станции можно вычислять на базовой станции (БС), на мобильной станции (МС) или на сервере (например, сервере определения местоположения или других сетевых объектах).
Таким образом, для синхронизации по времени базовых станций (эквивалентно, определения хронирования меток передач с этих базовых станций) различные способы, отвечающие настоящему изобретению, предусматривают определение частоты таких передач с базовых станций, что может составлять важную часть вышеописанной проблемы синхронизации по времени.
На фиг.2 показан пример мобильной станции, содержащей приемник ГСП, который можно использовать согласно настоящему изобретению. Приемник ГСП может определять текущее время в момент приема сигнала (например, метки хронирования сигнала сотовой связи, принятого от приемопередатчика 21) и позицию приемника, а также частоту поступающего извне сигнала с высокой точностью. Измерения текущего времени, позиции и частоты могут осуществляться в автономном режиме, если уровень принятого сигнала высок, или с помощью оборудования инфраструктуры (серверов), если отношение сигнал/шум для принятого сигнала мало (см., например, патенты США № 5945944; № 5841396 и № 5812087).
Мобильная станция 210 сотовой связи, показанная на фиг.2, содержит приемник 211 ГСП, подключенный к антенне 203 ГСП, и приемопередатчик 213 сотовой связи, подключенный к антенне 201 связи. Альтернативно, приемник 211 ГСП может размещаться в другом корпусе; в этом случае, станция 210 не содержит приемник ГСП и не требует его, поскольку приемник ГСП подключен к станции 210 и находится в одном месте с ней.
Приемник 211 ГСП может представлять собой традиционный приемник ГСП на основе аппаратного коррелятора и может представлять собой приемник ГСП на основе согласованного фильтра или же может представлять собой приемник ГСП, использующий буфер для хранения оцифрованных сигналов ГСП, обрабатываемых посредством быстрых преобразований свертки, а также может представлять собой приемник ГСП, описанный в патенте США № 6002363, согласно которому компоненты приемника ГСП используются совместно с компонентами приемопередатчика сотовой связи (см., например, фиг.7В патента США № 6002363, который включен сюда посредством ссылки).
Приемопередатчик 213 сотовой связи может представлять собой современный сотовый телефон, работающий по любому из общеизвестных стандартов сотовой связи, в том числе по стандарту сотовой связи GSM, японскому стандарту связи PDC или японскому стандарту связи PHS, стандарту аналоговой связи AMPS, североамериканскому стандарту связи IS-136 или стандарту несинхронизированной широкополосной связи с расширением по спектру МДКР.
Приемник 211 ГСП подключен к приемопередатчику 213 сотовой связи для передачи времени и позиции ГСП, согласно одному варианту осуществления, приемопередатчику 213 сотовой связи (который затем передает эту информацию на базовую станцию). Согласно другому варианту осуществления приемник 211 ГСП обеспечивает помощь в точном измерении несущей частоты сигнала сотовой связи, полученного приемопередатчиком 213.
Согласно одному варианту осуществления время ГСП можно получать на мобильной станции 210, считывая время ГСП сигналов ГСП со спутников ГСП. Альтернативно, можно использовать методику определения времени, описанную в патенте США № 5812087. Согласно этому подходу выборку сигналов ГСП, принятых на мобильной станции, можно передавать на сервер определения местоположения или на некоторые другие серверы, где выборка сигнала обрабатывается для определения времени приема, согласно патенту США № 5812087. Кроме того, текущее время можно альтернативно вычислить с использованием одного из различных способов, описанных в патенте США № 6215442.
Кроме того, приемопередатчик 213 сотовой связи может предоставлять приемнику ГСП вспомогательные данные, например доплеровскую информацию или временную информацию, согласно описанному в патентах США № 5841396, и № 5945944. Связь между приемником 211 ГСП и приемопередатчиком 213 сотовой связи можно также использовать для передачи записи данных ГСП на сотовую базовую станцию или от нее в целях согласования этой записи с другой записью, чтобы определить время на приемнике ГСП, согласно описанному в патенте США № 5812087. В тех случаях или вариантах осуществления, когда/где сервер определения местоположения используется для предоставления вспомогательных данных мобильной станции сотовой связи в целях определения позиции или времени в системе 210 или сервер определения местоположения совместно использует в обработке информацию (например, сервер определения местоположения определяет время или окончательное вычисление позиции мобильной системы 210), очевидно, что сервер определения местоположения, например, показанный на фиг.5 и описанный ниже, подключен к сотовой базовой станции посредством линии связи для помощи в обработке данных.
Позиция мобильной станции 210 обычно не фиксируется и обычно заранее не определена.
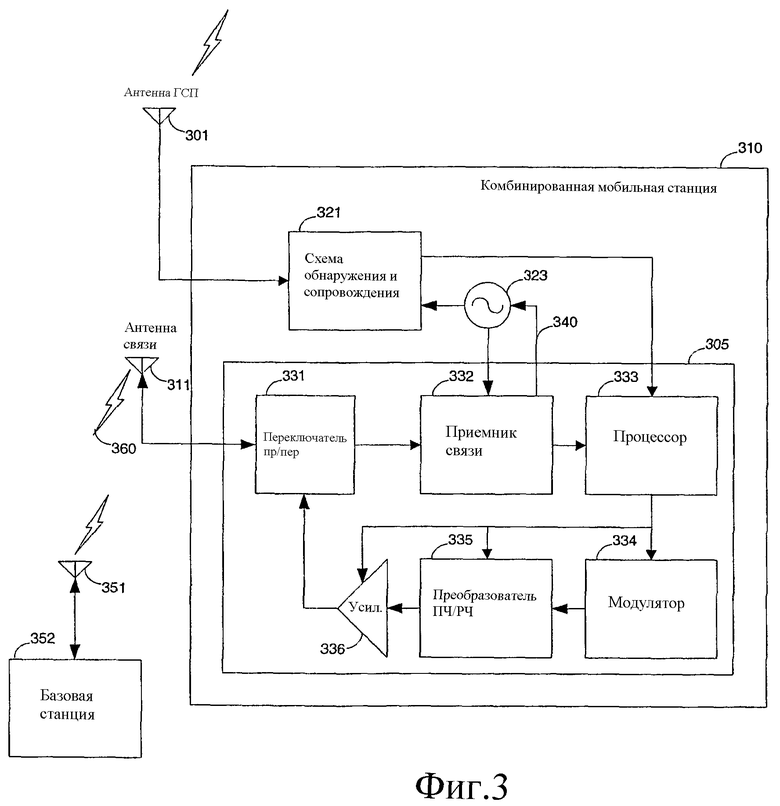
На фиг.3 показана блок-схема, представляющая комбинированную мобильную станцию, которую можно использовать согласно настоящему изобретению и в которой совместно используется общая схема для приемника ГСП и приемопередатчика сотовой связи. Комбинированная мобильная станция 310 содержит схему для осуществления функций, необходимых для обработки сигналов ГСП, а также функций, необходимых для обработки сигналов связи, принятых по линии 360 сотовой связи в базовой станции 352 или от нее.
В мобильной станции 310 объединены приемник ГСП и приемопередатчик сотовой связи. Схема 321 обнаружения и сопровождения подключена к антенне 301 ГСП, и приемопередатчик 305 связи подключен к антенне 311 связи. Генератор 323 обеспечивает опорные сигналы для схемы 321 и приемника 332 связи. Сигналы ГСП поступают через антенну 301 ГСП и поступают на схему 321, которая обнаруживает сигналы ГСП, принятые от различных спутников. Процессор 333 обрабатывает данные, созданные схемой 321, для передачи приемопередатчиком 305. Приемопередатчик 305 связи содержит переключатель 1 приема/передачи, который маршрутизирует сигналы связи (обычно РЧ) на антенну 311 связи и от нее. В некоторых системах, вместо переключателя пр/пер используется гребенчатый фильтр или дуплексер. Принятые сигналы связи поступают на приемопередатчик 305 связи и передаются процессору 333 для обработки. Сигналы связи, подлежащие передаче от процессора 333, поступают на модулятор 334, преобразователь 335 частоты и усилитель 336 мощности. В патенте США № 5874914, включенном в данное описание посредством ссылки, подробно описана комбинированная мобильная станция, содержащая приемник ГСП и сотовый приемопередатчик и использующая линию связи.
Несущую частоту сигнала сотовой связи от базовой станции можно измерять с использованием приемника ГСП разными способами. Согласно одному способу сотовый приемник 332 осуществляет частотную синхронизацию или фазовую синхронизацию принятой несущей от базовой станции. Для этого обычно используется генератор, управляемый напряжением (ГУН, VCO) (например, генератор 323), имеющий контур с конфигурацией частотной синхронизации или фазовой синхронизации, которым можно управлять сигналом от приемника связи по линии 340. В этом случае долговременная частотная составляющая ГУН пропорциональна долговременной частотной составляющей передаваемой несущей базовой станции (после удаления доплеровского сдвига частоты, обусловленного скоростью мобильной станции). Выходной сигнал ГУН можно использовать в качестве опорной частоты для схемы понижения частоты приемника ГСП (например, используемой в схеме 321 обнаружения и сопровождения). В порядке обработки сигнала на приемнике ГСП определяются частотные ошибки для различных принятых сигналов ГСП, полученных от нескольких спутников ГСП. Каждый такой принятый сигнал также содержит общую составляющую таких частотных ошибок по причине ошибки ГУН относительно идеального значения. Эту частотную ошибку, внесенную ГУН (так называемую частоту «смещения»), можно определять и масштабировать для определения частоты базовой станции после удаления доплеровского частотного сдвига, обусловленного движением мобильной станции.
Общеизвестно, что такие «синфазные» частотные сдвиги можно получить при обработке ГСП. Принятые частотные ошибки обусловлены сочетанием движения приемника и синфазным сдвигом. Движение пользователя описывается трехкомпонентным вектором скорости. Таким образом, с учетом синфазного сдвига в целом подлежат определению четыре неизвестные, связанные с частотой. Сигналы, полученные от четырех разных спутников ГСП, обычно позволяют решить эти четыре уравнения, а следовательно, найти ошибку синфазного смещения, обусловленную ошибкой ГУН. Осуществляя множественные наборы измерений частоты за период времени, можно дополнительно уменьшить количество сигналов спутников ГСП, которые нужно принять. Аналогично, ограничив скорость приемника (например, предположив, что перемещение по оси z невелико), можно дополнительно уменьшить количество необходимых принятых сигналов спутников.
Согласно альтернативе описанному подходу приемник ГСП может иметь опорный сигнал, не зависящий от ГУН, используемого в сотовом приемопередатчике. В этом случае приемник ГСП опять же определяет частоту своего опорного сигнала (обычно от кварцевого генератора). Выходной сигнал ГУН сотового приемопередатчика и опорный сигнал для приемника ГСП могут поступать на схему отсчета частоты, которая определяет, способом, известным из уровня техники, отношение частот двух опорных сигналов. Поскольку частота опорного сигнала для приемника ГСП была определена, частоту ГУН сотового приемопередатчика можно определить из отношения частот. Поскольку ГУН синхронизирован по фазе или частоте с несущей входящего сигнала базовой станции, несущую частоту можно определить с помощью простой процедуры сигнализации. Для устранения доплеровского частотного сдвига, обусловленного движением мобильной станции, относительно базовой станции, помимо скорости мобильной станции, обычно нужно знать местоположение базовой станции. Сервер, который осуществляет окончательное вычисление частоты базовой станции, обычно знает местоположение базовой станции.
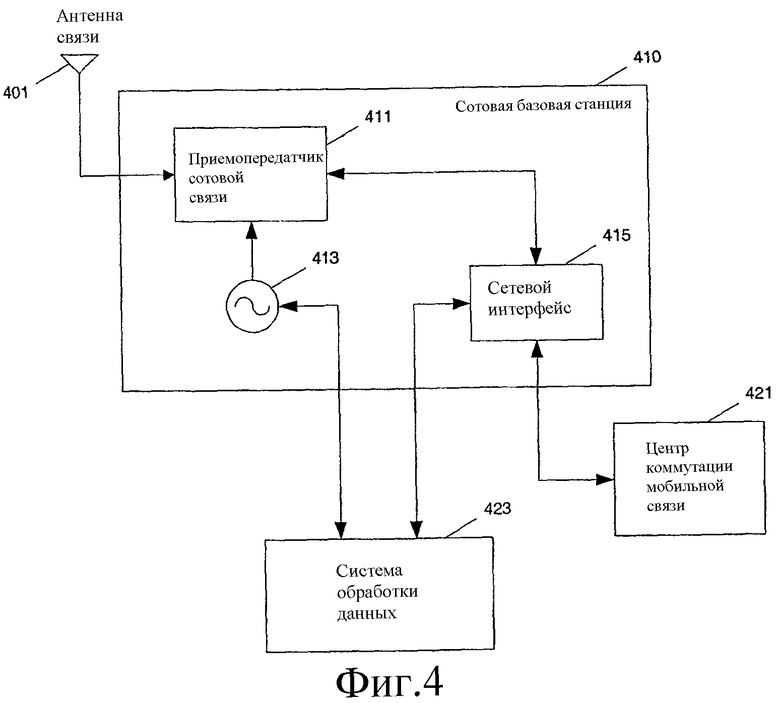
На фиг.4 показан пример сотовой базовой станции, которую можно использовать согласно различным вариантам осуществления настоящего изобретения. Базовая станция 410 содержит сотовый приемопередатчик 411, подключенный, по меньшей мере, к одной антенне 401 для передачи сигналов на мобильные станции сотовой связи и от них, которые находятся в зоне обслуживания сотовой базовой станции 410. Например, мобильные станции 210 и 310 сотовой связи могут представлять собой мобильные станции, обслуживаемые сотовой базовой станцией 410. Сотовый приемопередатчик 411 может представлять собой традиционный приемопередатчик, используемый для передачи и приема сигналов сотовой связи, например сигнала сотовой связи GSM или сигнала сотовой связи МДКР (CDMA). Генератор 413 может представлять собой традиционный системный генератор, который управляет частотой сигнала базовой станции. Частоту этого генератора можно измерять способами, отвечающими настоящему изобретению, для частотной синхронизации. Во многих случаях генератор 413 может быть высокостабильным, но по прошествии некоторого периода времени малая ошибка в частоте генератора будет приводить к уходу фазы синхросигнала базовой станции от идеала на большую величину. Точное измерение частоты генератора можно использовать для прогнозирования ошибки синхросигнала базовой станции и ошибки хронирования меток кадрирования, передаваемых базовой станцией. Сотовая базовая станция 410 обычно также содержит сетевой интерфейс 415, который переносит данные на сотовый приемопередатчик 411 и от него для подключения сотового приемопередатчика 411 к центру 421 коммутации мобильной связи, как известно из уровня техники. Сотовая базовая станция 410 может также содержать находящуюся совместно с ней систему 423 обработки данных. Альтернативно, система 423 обработки данных может быть удалена от базовой станции 410. Согласно некоторым вариантам осуществления система 423 обработки данных подключена к генератору 413 для регулировки или перекалибровки времени часов, чтобы таким образом синхронизировать часы с другими часами на других базовых станциях согласно способам, описанным в совместно рассматриваемой патентной заявке США за № 09/565212, поданной 4 мая 2000 г. Во многих случаях часы 413 высокостабильны, но работают в режиме свободной генерации, и это будет оказывать влияние на работу сети по фактическому изменению периодов часов. Вместо этого можно регулировать время, связанное с периодами часов. Этот процесс называется «перекалибровкой». Поэтому в целях частотной синхронизации может не существовать соединения между системой 423 обработки данных и генератором 413. Система 423 обработки данных подключена к сетевому интерфейсу 415 для приема данных от сотового приемопередатчика 411, например информации временных тегов для меток кадра, измеряемых мобильными системами для синхронизации с другими сотовыми базовыми станциями или для вычисления частоты передачи меток кадрирования. На практике базовая станция может содержать физическую мачтовую конструкцию, одну или несколько антенн и комплект электроники.
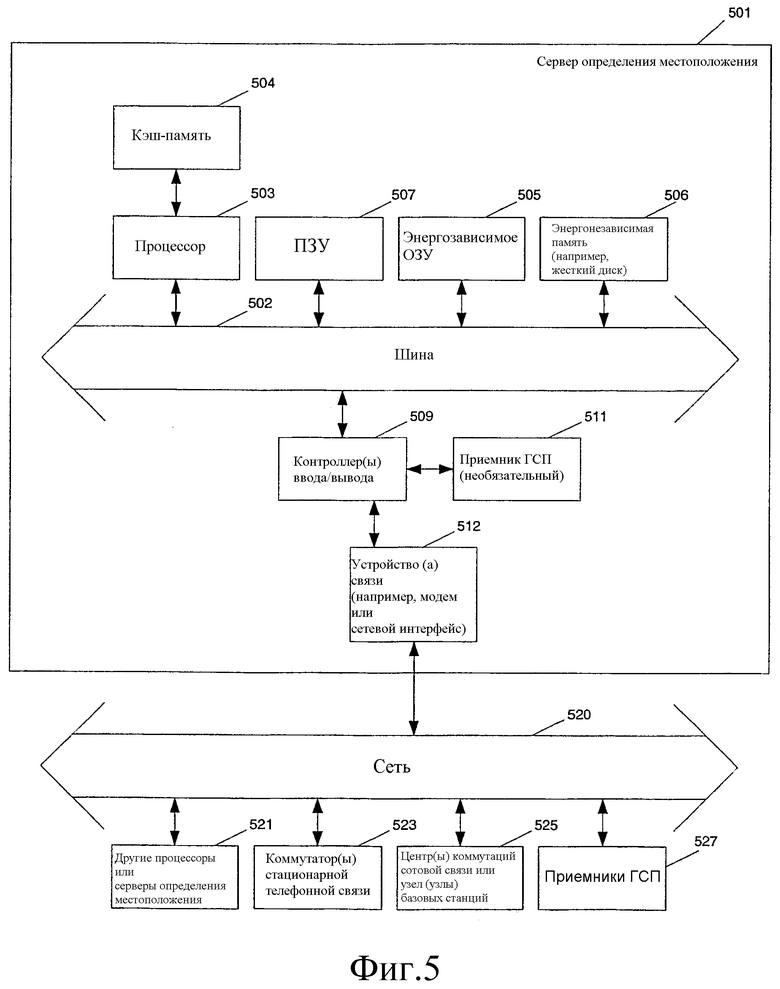
На фиг.5 показана система обработки данных, которую можно использовать согласно различным вариантам осуществления настоящего изобретения. Например, согласно описанному в патенте США № 5841396 сервер может предоставлять вспомогательные данные, например доплеровский сдвиг или другие спутниковые вспомогательные данные, приемнику ГСП на мобильной станции 210. Дополнительно или альтернативно, окончательное вычисление позиции может осуществлять сервер определения местоположения, а не мобильная станция 210 (после приема от мобильной станции псевдодальностей или других данных, из которых можно определить псевдодальности), который затем может пересылать эту информацию местоположения на базовую станцию, чтобы базовая станция могла вычислить частоту. Альтернативно, частоту можно вычислять на сервере определения местоположения или на других серверах, или на других базовых станциях. Система обработки данных, например сервер определения местоположения, обычно содержит устройства 512 связи, например модемы или сетевой интерфейс, и, в необязательном порядке, подключена к совместно расположенному приемнику 511 ГСП. Сервер определения местоположения может быть подключен к нескольким разным сетям через устройства 512 связи (например, модемы или другие сетевые интерфейсы). Такие сети включают в себя центр коммутации мобильной связи или несколько центров 525 коммутации мобильной связи, коммутаторы 523 стационарной телефонной системы, сотовые базовые станции, другие источники 527 сигналов ГСП или другие процессоры других серверов 521 определения местоположения.
Множественные сотовые базовые станции обычно способны покрывать географическую область зоной радиопокрытия, и эти разные базовые станции подключены, по меньшей мере, к одному центру коммутации мобильной связи, который известен из уровня техники (см, например, фиг.1). Таким образом, множественные экземпляры базовой станции 410 географически разнесены, но связаны между собой центром коммутации мобильной связи. Сеть 520 может быть подключена к сети опорных приемников ГСП, которые обеспечивают дифференциальную информацию ГСП, а также могут обеспечивать эфемеридные данные ГСП для использования при вычислении местоположения мобильных систем. Сеть подключена через модем или другой интерфейс связи к процессору 503. Сеть 520 может быть подключена к другим компьютерам или сетевым компонентам, например к системе 423 обработки данных, показанной на фиг.4 (через необязательное взаимное соединение, не показанное на фиг.4). Кроме того, сеть 520 может быть подключена к компьютерным системам, которыми пользуются операторы экстренных (аварийных) служб, например диспетчерским пунктам общественной безопасности, которые отвечают по телефону 911. Различные примеры способа использования сервера определения местоположения описаны в многочисленных патентах США, в том числе в патентах США № 5841396; № 5874914; № 5812087 и № 6215442, которые все включены в данное описание посредством ссылки.
Сервер 501 определения местоположения, который представляет собой систему обработки данных, содержит шину 502, подключенную к микропроцессору 503, ПЗУ 307, энергозависимой ОЗУ 505 и энергонезависимой памяти 506. Микропроцессор 503 подключен к кэш-памяти 504, как показано в примере на фиг.5. Шина 502 соединяет между собой эти различные компоненты. Хотя на фиг.5 показано, что энергонезависимая память является локальным устройством, непосредственно подключенным к остальным компонентам системы обработки данных, очевидно, что настоящее изобретение может использовать энергонезависимую память, удаленную от системы, например сетевое запоминающее устройство, подключенное к системе обработки данных через сетевой интерфейс, например модем или интерфейс Ethernet. Шина 502 может включать в себя одну или несколько шин, соединенных друг с другом через различные мосты, контроллеры и/или адаптеры, известные из уровня техники. Во многих случаях сервер определения местоположения может осуществлять свои операции автоматически, без помощи человека. В некоторых конструкциях, в которых требуется взаимодействие с человеком, контроллер 509 ввода/вывода может осуществлять связь посредством дисплеев, клавиатур и других устройств ввода/вывода.
Заметим, что, хотя на фиг.5 показаны различные компоненты системы обработки данных, она не предназначена для представления какой-либо конкретной архитектуры или конкретного способа соединения компонентов между собой, поскольку такие подробности не входят в объем настоящего изобретения. Очевидно также, что настоящее изобретение допускает использование сетевых компьютеров и других систем обработки данных, которые имеют меньше компонентов или, возможно, больше компонентов.
Из данного описания следует, что аспекты настоящего изобретения можно реализовать, по меньшей мере, частично, программными средствами. Таким образом, в компьютерной системе или другой системе обработки данных могут выполняться методы, соответствующие выполняемым ее процессором последовательностям команд, содержащихся в памяти, например ПЗУ 507, энергозависимой ОЗУ 505, энергонезависимой памяти 506, кэш-памяти 504 или удаленном запоминающем устройстве. В различных вариантах осуществления, для реализации настоящего изобретения совместно с программными командами можно использовать электронную схему. Таким образом, методы не ограничиваются никакой конкретной комбинацией оборудования и программного обеспечения и никаким конкретным источником команд, выполняемых системой обработки данных. Кроме того, в пределах этого описания, различные функции и операции описаны как осуществляемые или обусловленные программным кодом для упрощения описания. Однако специалистам в данной области техники очевидно, что эти выражения подразумевают, что функции осуществляются в результате выполнения кода процессором, например процессором 503.
В некоторых вариантах осуществления, способы настоящего изобретения могут осуществляться на компьютерных системах, которые одновременно используются для других функций, например коммутации сотовой связи, услуг передачи сообщений и т.п. В этих случаях, некоторое или все оборудование, показанное на фиг.5, совместно используется для нескольких функций.
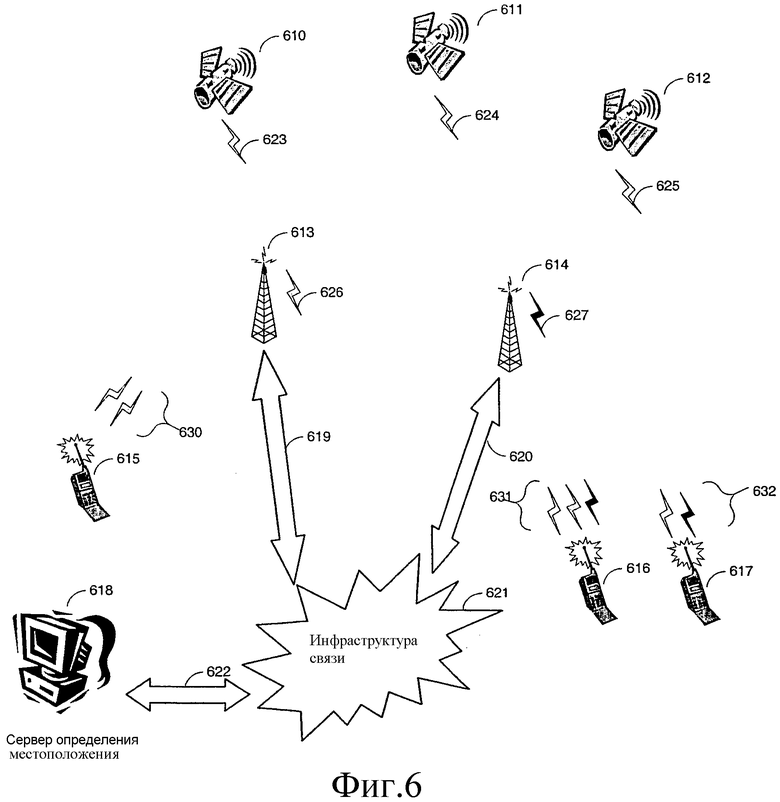
На фиг.6 показана общая топология системы, которую можно использовать согласно данному изобретению. В иллюстративных целях фигура значительно упрощена; однако она иллюстрирует несколько различных ситуаций, которые можно использовать на практике.
На фиг.6 показаны три мобильные станции (615, 616, и 617), две сотовые базовые станции (613 и 614), орбитальная группировка из трех спутников ГСП (610, 611, и 612) и один сервер 618 определения местоположения.
Сервер 618 определения местоположения осуществляет связь с другой инфраструктурой (обычно) по беспроводной линии связи 622, линиям связи 619 и 620 сотовой инфраструктуры (обычно проводным) и через инфраструктуру 621 связи (обычно проводную). Передачи со спутников 623-625 ГСП показаны незалитыми. Передачи с базовой станции 613 имеют штриховку (например, 626), а передачи с базовой станции 614 имеют сплошную заливку (например, 627). Прием сигналов мобильными станциями (с приемниками ССП) следуют одной и той же схеме кодирования. Таким образом, из фиг.6 следует, что МС 615 принимает сигналы со спутников ГСП и с обеих БС 613 и БС 614.
Для простоты, все мобильные станции принимают сигналы от всех спутников ГСП, хотя на практике это не обязательно. На практике, может существовать множество серверов определения местоположения, гораздо больше базовых станций и мобильных станций; и каждая отдельная мобильная станция может наблюдать передачи с более чем двух базовых станций. Кроме того, серверы определения местоположения могут быть совмещены с базовыми станциями или удалены от базовой станции (как показано на фиг.6).
В примере, показанном на фиг.6, мобильная станция 616 обычно осуществляет двустороннюю связь только с одной из базовых станций, от которых она принимает сигналы. Например, МС 616 может осуществлять двустороннюю связь с базовой станцией 613, но все же может принимать передачи с обеих базовых станций 613 и 614. Таким образом, МС 616 в этом случае может осуществлять операции синхронизации на базовых станциях 613 и 614, хотя в этом примере она передает информацию синхронизации только на базовую станцию 613. Из уровня техники известно, что сотовые телефоны отслеживают передачи других базовых станций, помимо главного или «обслуживающего» узла базовых станций, чтобы подготовиться к будущим передачам или «передачам обслуживания» на другую базовую станцию.
На фиг.6 также показан сервер определения местоположения, который может передавать данные на мобильные станции и от них через инфраструктуру связи и сотовую инфраструктуру. Сервер определения местоположения может размещаться на базовой станции, но обычно удален от базовых станций и фактически может осуществлять связь с несколькими базовыми станциями. Информация синхронизации, предоставляемая мобильными станциями, обычно поступает на одну или несколько серверов определения местоположения, которые обрабатывают эту информацию и определяют относительное и абсолютное хронирование передач базовых станций.
На фиг.7 показана кадровая структура каналов трафика сигналов сотовой связи GSM. В сигнале трафика GSM суперкадр наступает каждые 6,12 секунд и гиперкадр наступает каждые 2048 суперкадров, т.е. каждые 3,4816 часов. Поэтому суперкадр является удобным периодом для измерения интервала времени. Альтернативно, можно использовать общее количество кадров, мультикадров и т.д., поскольку моменты их появления однозначно определяются как кратное длительностей битов.
Согласно одному варианту осуществления данного изобретения длительность передачи измеряется между двумя метками кадрирования, содержащимися в сигнале сотовой связи, передаваемом сотовой базовой станцией. Одна или несколько мобильных станций производит набор измерений для определения длительности, т.е. хронирования более поздней метки кадрирования по отношению к более ранней метке кадра. Измеренную длительность сравнивают (обычно на сервере) с ожидаемым хронированием. Результат используют для определения ошибки в частоте генератора базовой станции против желаемого значения.
Ошибка в измерении может быть задана как доля истинного значения и выражаться в миллионных частях (млн ч.). Например, если время между конкретными метками кадрирования задано равным 1 секунде, но измеренное значение равно 1 секунде плюс 1 микросекунда, то ошибку можно выразить как 1 микросекунда/1 секунда = 1 млн ч. Это удобный способ указания ошибки, поскольку он также применим к ошибкам других синхронизированных периодов (например, битовой скорости), а также к ошибке в несущей частоте базовой станции с учетом того (что в действительности имеет место), что передаваемая несущая частота синхронизирована с метками кадрирования.
Предположим, одна или несколько мобильных станций измеряют длительность сигнала базовой станции, соответствующую 98 переданным суперкадрам, равной приблизительно 10 минутам. Конкретное измерение времени может соответствовать началу нумерованного мультикадра. Мобильная станция однозначно отслеживает номер мультикадра посредством информации сигнализации, передаваемой в передачах основного диапазона. Поэтому идеальный период измерения точно известен и выражается в единицах длительности переданного бита (битовый период равен 48/13 микросекунды). Идеальный период измерения равен 98 умножить на идеальный период каждого суперкадра, т.е. 599,76 секунд. Однако фактическое измерение времени подвержено ошибкам в часах передатчика и различным ошибкам, связанным с измерением.
Когда промежуток времени между двумя заранее определенными метками кадрирования, длящийся около 600 секунд, измеряют с ошибкой менее 1 микросекунды, ошибка измеренной частоты передачи меток кадрирования составляет менее 0,00167 млн ч. Эта точность хорошо согласуется с краткосрочной и долгосрочной стабильностью частоты термостабилизированных кварцевых генераторов, которые обычно используются в сотовых базовых станциях, несмотря на то, что абсолютная точность таких генераторов часто бывает значительно ниже. В действительности, во многих случаях частоту меток кадрирования можно измерять со значительно более высокой точностью. Хотя максимальная абсолютная ошибка в частоте опорных генераторов базовых станций GSM задана равной 0,05 млн ч., стабильность этих генераторов обычно значительно превышает это значение.
Измеряемая длительность может составлять даже несколько часов для достижения повышенной точности измерения с учетом того, что краткосрочная стабильность генератора базовой станции поддерживает такую точность и долгосрочные характеристики ухода (например, вследствие старения) следуют гладкой кривой. Например, период измерения длительностью в один час с точностью 1 микросекунда обеспечивает точность частоты 0,000278 млн ч., что опять же согласуется с краткосрочной стабильностью термостабилизированных кварцевых генераторов высокого качества. В действительности, общеизвестно, что точность высококачественных кварцевых генераторов в десять раз выше.
Таким образом, измеряя длительность периода передачи между двумя метками кадрирования с использованием мобильной станции, можно обеспечить очень точное измерение частоты передачи меток кадрирования, которую можно связать с частотой генератора базовой станции.
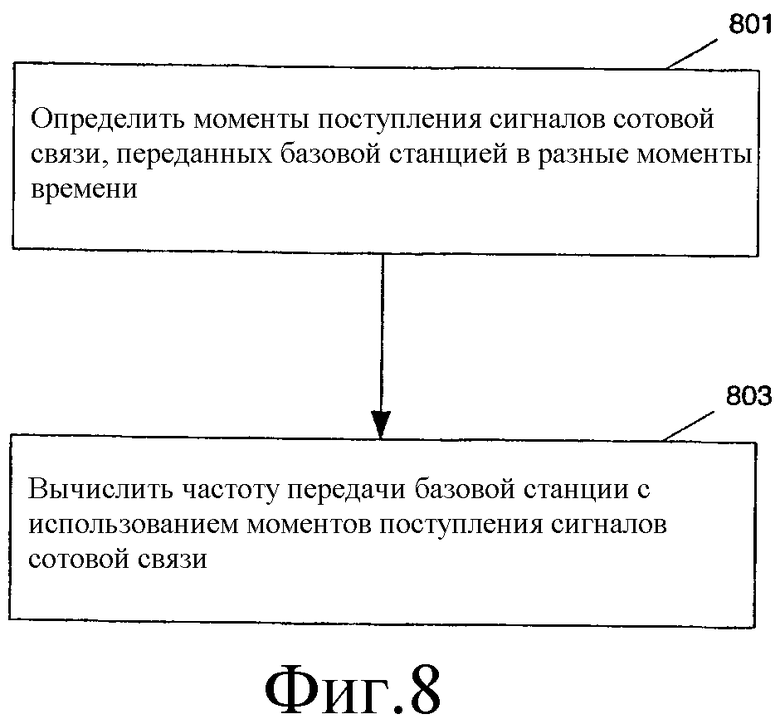
На фиг.8 показана логическая блок-схема определения частоты передач базовой станции согласно одному варианту осуществления настоящего изобретения. На этапе 801 моменты поступления сигналов сотовой связи, передаваемых базовой станцией, измеряются в различные моменты времени. Моменты поступления меток кадрирования (например, границ определенных кадров) измеряются с использованием одной или нескольких мобильных станций (например, МС 210, МС 310 или МС 615-617) с приемниками ГСП. Затем можно вычислить частоту передачи базовой станции с использованием моментов поступления этих сигналов сотовой связи. Частоту меток кадрирования можно вычислить, разделив известное количество меток кадрирования, присутствующих в периоде измерения, на длительность этого периода. Поскольку несущая частота сигнала базовой станции и частота передачи меток кадрирования синхронизированы с частотой задающего генератора базовой станции, можно определить частоту задающего генератора базовой станции и несущую частоту сигнала базовой станции. В некоторых вариантах осуществления, с точки зрения вычислений, удобнее вычислять период передачи с базовой станции.
Согласно вышесказанному определение частоты сотового передатчика обычно производится на сервере или так называемом «объекте определения местоположения» (OOM, РДЕ), а не на сотовой базовой станции, хотя OOM может находиться в том же месте, что и сотовая базовая станция. Этот сервер или OOM представляет собой комплект оборудования, который находится в сотовой инфраструктуре или инфраструктуре сети связи, которая может передавать сообщения на мобильные станции и от них через сеть связи, сотовую сеть и беспроводные линии связи. Таким образом, когда мобильные станции производят измерения, относящиеся к хронированию передач базовых станций, такие измерения передаются по линиям сотовой связи на обслуживающую базовую станцию, а затем через стационарные линии инфраструктуры на OOM. OOM использует эти измерения для вычисления времени и частоты, связанных с будущими метками кадрирования. Эта информация может затем поступать на мобильные станции или на другие сетевые объекты, желающие использовать эту информацию для повышения производительности системы. В действительности, согласно одному варианту осуществления такая информация хронирования играет роль вспомогательных данных, которые позволяют мобильным станциям более эффективно осуществлять будущие операции приема и измерения ГСП. Этот вариант осуществления также предусматривает подход «раскрутки», согласно которому более раннее измерение ГСП, произведенное некоторыми мобильными станциями, значительно повышает производительность последующих измерений ГСП. Такое повышение производительности включает в себя значительное возрастание чувствительности, уменьшение времени до первой фиксации и повышение работоспособности, что описано в патентах США № 5841396 и № 5945944.
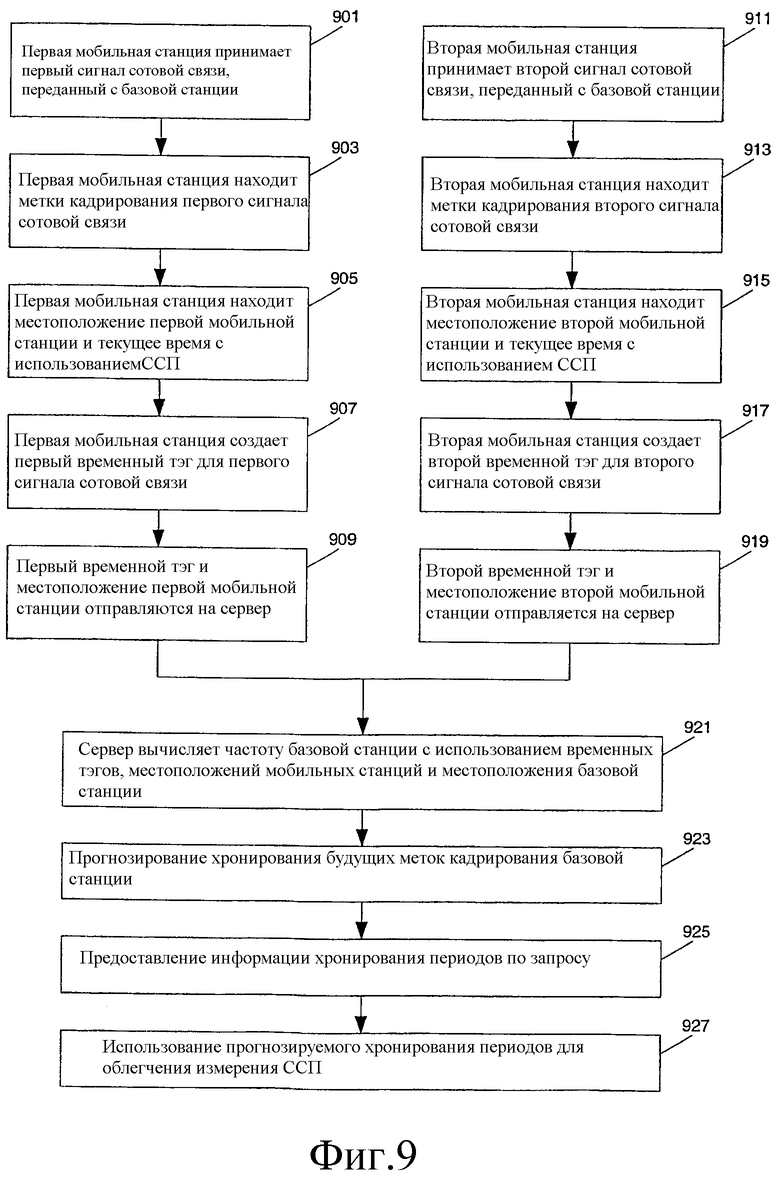
На фиг.9 более подробно показан способ определения частоты сигналов базовой станции с использованием измерений периодов кадрирования сигналов базовой станции согласно одному варианту осуществления настоящего изобретения. На этапах 901-909 первая мобильная станция (МС) принимает сигнал сотовой связи от базовой станции (БС); находит метку кадрирования, содержащуюся в таком сигнале сотовой связи; находит текущее время и свое собственное местоположение с использованием своего приемника ГСП; присваивает временной тег меткам кадрирования с использованием текущего времени, найденного на этапе 905; и передает свое местоположение (или информацию для определения ее местоположения) и временные теги (или информацию для определения временных тегов) на сервер, например сервер определения местоположения.
Очевидно, что этап 905 может предшествовать этапам 901 и 903 или осуществляться одновременно с этапами 901 и 903. Путь передачи для отправки информации местоположения и временных тегов обычно включает в себя линию сотовой связи в совокупности с дополнительными наземными линиями связи (например, телефонными линиями, локальными сетями и пр.).
Сигнал сотовой связи, принятый на этапе 901, может поступить по линии связи, отличной от той, которая использовалась для передачи данных на этапе 909. Это значит, что базовая станция, наблюдавшаяся на этапе 901, может не быть «обслуживающей» базовой станцией для мобильной станции. Это может быть базовая станция, которую мобильная станция наблюдает в течение короткого времени, чтобы определить список «соседних» базовых станций, которые можно использовать в дальнейшем при операции передачи обслуживания. Часто бывает так, что мобильная станция может наблюдать 10 или более базовых станций, что известно из уровня техники.
Вторая мобильная станция (или даже та же самая базовая станция) осуществляет этапы 911-919 аналогично этапам 901-909. Обычно, этапы 911-919 осуществляются в моменты времени, отличные от тех, когда осуществляются этапы 901-909. Очевидно, что этапы 911-919 могут осуществляться на той же мобильной станции, на которой осуществлялись этапы 901-909, но в разные моменты времени.
На этапе 921 сервер (например, сервер определения местоположения) обрабатывает временные теги, полученные от мобильных станций, местоположения мобильных станций и информацию о местоположении базовой станции для вычисления частоты, относящейся к базовой станции, например частоты, связанной с частотой меток кадрирования или любыми другими частотами базовой станции, синхронизированными с этой частотой. Частоту можно выражать через номинальную (идеальную) частоту и ошибку, причем последняя выражается, например, в безразмерных единицах млн ч. Поскольку временные теги соответствуют моментам времени поступления меток кадрирования на измеряющую мобильную станцию (или станции), местоположения мобильных станций и базовой станции нужно преобразовать от временных тегов в меры времени в одном и том же месте, чтобы вычислить точную длительность передачи. Для этого из временных тегов вычитают задержки сигнала сотовой связи на распространение от передающей базовой станции к измеряющим мобильным станциям.
На этапе 923 моменты появления будущих меток кадрирования базовой станции можно прогнозировать с использованием измеренной частоты передачи. Такие прогнозы можно передавать на различные сетевые объекты, например базовые станции или мобильные станции, по запросу на этапе 925.
Поскольку информация, предоставляемая серверу на этапах 909 и 919 также позволяет определять текущее время, связанное с метками кадрирования, координацию по времени также можно производить согласно способам, описанным в совместно рассматриваемой патентной заявке США № 09/565212, поданной 4 мая 2000 г.
На этапе 927 мобильные станции или базовые станции могут использовать прогнозируемое хронирование периодов для облегчения измерений ССП или операций РВП или РНРВ.
Хотя на фиг.9 проиллюстрирован способ определения частоты передачи базовой станции с использованием двух мобильных станций и одной базовой станции, на практике, обычно задействуется значительно больше мобильных станций. Кроме того, каждая мобильная станция может одновременно или последовательно просматривать периоды хронирования нескольких базовых станций. Поэтому множественные операции хронирования наподобие операций 901-909 (или 911-919) могут осуществляться параллельно в соответствии с множественными базовыми станциями. Обработка, показанная на фиг.9, может осуществляться на непрерывной основе. Согласно отмеченному выше этапы, показанные на фиг.9, могут осуществляться одной мобильной станцией, наблюдающей одну или несколько базовых станций.
Ошибки в прогнозах периода можно уменьшить, моделируя характеристики долгосрочной частоты от времени (уход) на базовой станции. Во многих случаях, долгосрочный уход гладок и хорошо прогнозируем для высококачественных генераторов базовых станций. Таким образом, характеристики ухода можно определить из множественных измерений передач базовой станции в течение очень долгих периодов времени. Для прогнозирования будущих уходов на основании характеристик ухода можно использовать процедуру аппроксимации кривой. В типичных алгоритмах аппроксимации кривой могут использоваться многочлены.
Согласно способу, представленному на фиг.9, не обязательно, чтобы одна и та же мобильная станция производила последовательные измерения хронирования. В действительности, каждое измерение хронирования, соответствующее данной базовой станции, может производиться разными мобильными станциями. Когда в течение периода времени производится большое количество измерений, можно осуществлять различные операции усреднения, например усреднение методом наименьших квадратов (МНК, LMS). Обработка большого количества измерений не только значительно снижает ошибку измерения, но и позволяет отбрасывать измерения, содержащие необычно высокие ошибки, обусловленные паразитными эффектами, например многолучевым приемом передач базовой станции. Для такого выбраковывания «выбросов» можно сначала произвести первоначальную оценку частоты с использованием всех измерений, затем отбросить те измерения, которые кажутся сильно отличающимися от первоначального измерения, и, наконец, повторно вычислить оценку с использованием измерений, которые не были отброшены. Для выбраковывания выбросов можно также использовать другие подходы, например, с использованием порядковой статистики.
Сигнал сотовой связи, поступающий на мобильную станцию, может являться результатом отражения первичного сигнала или наличия множественных прямых и отраженных сигналов, так называемого «многолучевого распространения». В большинстве случаев, многолучевое распространение приводит к положительной избыточной задержке, т.е. более долгой задержке в передаче сигнала, чем при прямой передаче сигнала в пределах прямой видимости. Задержку для передачи в пределах прямой видимости можно определить, разделив расстояние между базовой станцией и мобильной станцией на скорость света. Поскольку многолучевое распространение редко приводит к отрицательной избыточной задержке, простое усреднение может не быть наилучшим подходом к снижению ошибки, обусловленной многолучевым распространением.
Избыточную задержку, вызванную многолучевым распространением, можно скомпенсировать с помощью взвешенного усреднения. Один способ состоит в выделении, т.е. придании большего веса, измерениям, полученным из сигналов высокого качества, например сигналов высокого уровня (с высоким отношением сигнал/шум) и сигналов с узкими, четко очерченными формами сигнала. Для определения качества принятого сигнала можно использовать некий тип автокорреляционного анализа. Сигналам высокого качества свойственно более часто появляться из передач в пределах прямой видимости, поэтому они проявляют меньшие избыточные задержки, чем сигналы низкого качества. В некоторых случаях, при достаточно высоком уровне принятого сигнала можно использовать алгоритмы обработки сигнала для оценки количества, уровня и относительной задержки принятых сигналов от данной базовой станции. В этом случае, для минимизации эффекта избыточной задержки можно выбирать наименьшую задержку.
На фиг.9 проиллюстрирован способ, согласно которому длительность передачи вычисляется сервером, а на фиг.10 показан другой способ, согласно которому длительность передачи вычисляется на мобильной станции. На этапах 1001-1007 мобильная станция принимает сигнал сотовой связи от базовой станции (БС) и местоположение БС; находит метку кадрирования, содержащуюся в этом сигнале сотовой связи; находит свое местоположение и текущее время с использованием своего приемника ГСП; и присваивает временной тег меткам кадрирования с использованием текущего времени, найденного на этапе 1005. Аналогично, временной тег для второй метки кадрирования определяется на этапах 1011-1017. На этапе 1019 мобильная станция вычисляет длительность времени передачи с использованием временных тегов. В этом случае, обычно требуется информация о местоположении мобильной станции и базовой станции, поскольку мобильная станция может перемещаться между измерениями и, следовательно, изменение расстояния между базовой станцией и мобильной станцией нужно компенсировать. Если известно, что мобильная станция неподвижна, то эта информация не требуется. Частоту передачи меток кадрирования для базовой станции можно определить и можно использовать для прогнозирования хронирования будущих меток кадрирования базовой станции. Длительность или измеренную частоту можно передавать на сервер, и прогнозирование хронирования может осуществляться на сервере. На этапах 1022 и 1023 прогнозирование может предоставляться мобильным станциям или базовым станциям для помощи в измерении ССП или в операциях РНРВ или РВП. Первый и второй сигналы сотовой связи на фиг.10 обычно соответствуют двум фрагментам сигнала сотовой связи, полученным в разное время в ходе одного и того же телефонного «вызова». Однако они также могут соответствовать сигналам от базовой станции, принятым в ходе отдельных вызовов.
На фиг.11 подробно показан способ определения частоты сигналов базовой станции с использованием измерений несущей частоты сигналов базовой станции согласно одному варианту осуществления настоящего изобретения. На этапе 1101 мобильная станция принимает сигнал сотовой связи, переданный с базовой станции. Она синхронизируется несущей частотой принятого сигнала сотовой связи на этапе 1103. Для этого обычно используется либо система фазовой автоподстройки частоты (ФАПЧ, PLL), либо схема автоматической регулировки частоты (АРЧ, AFC), каждая из которых содержит генератор, управляемый напряжением (например, ГУН 323). Согласно процедуре синхронизации ГУН должен поддерживать пропорциональное отношение с фазой или частотой принятого сигнала.
На этапе 1105 мобильная станция использует приемник ГСП (или ССП) для определения своего местоположения, скорости, текущего времени и частоты опорного сигнала своего гетеродина. Для определения частоты базовой станции главный интерес представляет информация измерения опорной частоты гетеродина; однако информация местоположения, скорости и текущего времени обычно является побочным продуктом обработки ГСП. Местоположение и скорость необходимы для определения влияния движения МС на измерение частоты. Согласно вышеописанному локальный опорный сигнал, используемый приемником ГСП, может обеспечивать ГУН сотового приемопередатчика или может обеспечивать отдельный кварцевый генератор.
На этапе 1107 мобильная станция определяет принятую частоту несущей базовой станции из сигнала ГУН и из измерения опорной частоты ГСП. Согласно описанному выше это прямой побочный продукт обработки ГСП, если ГУН используется в качестве ее опорной частоты. Альтернативно, для определения отношения частот сигналов ГУН и ГСП можно использовать отдельную схему отсчета частоты. Отношение частот и значение опорной частоты ГСП, определенное при обработке сигналов ГСП, обеспечивает точную оценку частоты ГУН, а следовательно, и несущей частоты принятого сигнала базовой станции.
На этапе 1109 информация частоты совместно со вспомогательными данными (например, текущим временем, информацией идентификации базовой станции и пр.) передается на сервер. На этапе 1111 информация несущей частоты, которая может быть выражена в единицах млн ч. или других единицах, может использоваться для вычисления частоты генератора базовой станции и/или других частот (например, частоты меток кадрирования). Местоположение и скорость мобильной станции используются совместно с местоположением базовой станции для определения частотной ошибки, обусловленной относительным движением мобильной станции и базовой станции. Эту ошибку можно устранить, чтобы получить точную оценку частоты базовой станции. Сервер может объединить несколько таких измерений частоты друг с другом, чтобы дополнительно улучшить оценку частоты базовой станции. Наконец, на этапах 1113-1117 сервер прогнозирует хронирование периодов будущих меток кадрирования базовой станции на основании этой информации частоты и отправляет его другим сетевым элементам (например, мобильным станциям, базовым станциям или серверам определения местоположения) по запросу для облегчения измерений (например, измерений ССП или операций РВП или РНРВ).
Хотя на фиг.11 показан сценарий с участием только мобильной станции и базовой станции, на практике, могут участвовать гораздо больше мобильных станций. Каждая мобильная станция может одновременно и последовательно просматривать передачи от нескольких базовых станций. Поэтому множественные последовательности операций (например, этапов 1101-1109) могут иметь место параллельно в соответствии с множественными базовыми станциями. Очевидно также, что обработка, показанная на фиг.11, может осуществляться на непрерывной основе.
Специалисты в данной области техники могут предложить другие варианты способов, представленных на фиг.8-11. Например, мобильная станция может осуществлять вычисления 1111-1117, если она получает местоположение базовой станции. На фиг.10, вместо измерения текущего времени на этапах 1005 и 1015, мобильная станция может вычислять истекшее время после того, как откалибрует свои часы способом, указанным этапами 1101-1107 на фиг.11.
Когда генератор базовой станции достаточно стабилен, калибровка частоты базовой станции может позволить точно предсказать периоды будущих меток хронирования, передаваемых базовой станцией. Обычно, стабильности генератора базовой станции достаточно, чтобы можно было точно прогнозировать хронирование за очень длительные периоды времени после того, как произведена координация по времени.
На базовых станциях в качестве источников опорной частоты обычно используются высококачественные термостабилизированные кварцевые генераторы. Некоторые базовые станции обычно синхронизируют свои опорные сигналы с сигналами, передаваемыми со спутников ГСП, в этом случае долгосрочная стабильность передач базовой станции синхронизируется со стабильным источником типа цезия и пригодна для точного прогнозирования хронирования. В нижеследующем рассмотрении мы предполагаем, что такая синхронизация ГСП не используется. В этом случае два основных источника нестабильности генератора базовой станции таковы: 1) кратковременная нестабильность частоты, которая обычно характеризуется мерами кратковременной стабильности частоты, например методами спектральной плотности шума или дисперсией Аллана; и 2) долговременным уходом частоты, который обычно связан с эффектами старения. Долговременный уход частоты обычно бывает порядка 0,0001 млн ч. в день или лучше, и, следовательно, не должны представлять значительный источник ошибки за относительно короткие периоды времени (например, от 15 до 30 минут).
Большинство генераторов базовых станций использует термостабилизированные кварцевые генераторы. Малые изменения температуры термостата или напряжения, подаваемого на термостат, могут способствовать увеличению частотной ошибки. Кроме того, определенные характеристики краткосрочной стабильности частоты, например эффекты случайного блуждания частоты, порождают частотную ошибку, которая возрастает как функция времени наблюдения [см. Дж. Рутман и Ф.Л. Уоллс «Описание частотной стабильности в точных источниках частоты» (J. Rutman and F.L. Walls, Characterization of Frequency Stability in Precision Frequency Sources), протоколы IEEE, т. 79, №6, июнь 1991 г., стр. 952-959]. Таким образом, важно проверять величину этих эффектов с точки зрения устройства и системы.
Рассматриваемая здесь краткосрочная стабильность частоты измеряется в течение интервала времени от нескольких секунд до нескольких часов. Измеренные в течение этих периодов высококачественные термостабилизированные генераторы имеют краткосрочную стабильность (дробная девиация частоты или так называемая дисперсия Аллана) порядка 0,00001 млн ч. При такой стабильности сигналы хронирования от базовой станции можно прогнозировать на период в будущем, равный 10 минутам, с точностью 6 наносекунд и на период в будущем, равный 1 часу, с точностью 36 наносекунд.
Долгосрочная стабильность высококачественных термостабилизированных генераторов может быть порядка 0,001 млн ч. в день или лучше, что соответствует около 0,00004 млн ч. в час [см. Fundamentals of Quartz Oscillators, Hewlett Packard Application Note 200-2]. Таким образом, для прогнозов на период порядка часа или более влияние характеристик старения может преобладать.
С точки зрения измерения, Пикфорд (Pickford) рассмотрел уход частоты между двумя базовыми станциями, опираясь на использование измерений двусторонней задержки [см. Эндрю Пикфорд, «Требования к синхронизации БППС и частоты обновления МИМ для РНРВ», техническое представление техническому подкомитету T1P1, 8 октября 1999 г.]. Он обнаружил, что после устранения линейного фазового (или временного) ухода (т.е. ошибки фиксированного смещения частоты) чистая среднеквадратическая ошибка по времени составляла порядка 66 наносекунд даже на протяжении периодов свыше 1 часа. Он также продемонстрировал, что использование измерений в течение часового периода и экстраполяция их на час вперед дает подобную точность. Кроме того, проверка его кривых указывает, что остаточная ошибка после устранения среднего ухода преобладает в виде случайных ошибок. Это может указывать, что основные оставшиеся ошибки обусловлены ошибками измерений или аддитивным шумом, а не фактическим дрожанием генератора. Заметим, что среднеквадратичная ошибка в 66 наносекунд, измеренная за период в 1 час, эквивалентна частотной стабильности около 0,000018 млн ч., что типично для высококачественного кварцевого генератора.
В аналогичной статье Т. Ранталлайнена (T. Rantallainen) и др. предоставлены результаты, аналогичные вышеизложенным [см. Т. Ранталлайнен и В. Рууту, «Измерения ДСЗ для метода РНРВ», техническое представление T1P1.5/99-428R0, 8 июля 1999 г.], примерно от 1500 до 2200 секунд. Для нелинейных характеристик графика зависимости фазы от времени объяснений не дано. Скорее всего такое поведение объясняется старением характеристик кварцевого генератора, что указано выше. Поскольку характеристикам старения свойственны гладкость и предсказуемость, алгоритм полиномиальной аппроксимации должен хорошо работать. Например, аппроксимация зависимости периода кадра от измеренного времени многочленом второго порядка будет хорошо компенсировать линейный по времени уход частоты.
Дополнительные факторы, которые могут способствовать малым изменениям частоты со временем, включают в себя флуктуации опорных частот, связанные с напряжением и температурой. Эти факторы могут проявляться в виде очень малых изменений частоты. Базовым станциям свойственно иметь регулируемые напряжения и температуры для обеспечения высокой надежности.
В случае значительного движения пользователя важно, чтобы любые доплеровские эффекты не оказывали заметного влияния на вышеописанные измерения хронирования и частоты. В частности, если мобильная станция измеряет время в один момент и прогнозирует текущее время, связанное с границей кадра сигнала сотовой связи, наступающей в другой момент, движение мобильной станции может привести к ошибке, особенно, если мобильная станция быстро движется и/или промежуток между этими моментами времени велик. Решить эту проблему можно разными способами. Например, когда мобильная станция может определять свою скорость, данные о скорости мобильной станции можно передавать на сервер с целью компенсации ошибок, обусловленных доплеровскими эффектами, связанными со скоростью изменения расстояния между мобильной станцией и базовой станцией. Этот подход показан на фиг.11. Согласно вышеописанному сигналы ГСП можно обрабатывать для оценки скорости принимающей платформы. Эту информацию можно использовать для компенсации любых ошибок, обусловленных движением мобильной станции.
Могут оставаться некоторые остаточные ошибки, например задержки вследствие многолучевого распространения и переходные задержки, вызванные аппаратурой мобильной станции. Однако мобильная станция и/или базовая станция часто способна определить степень таких ухудшений и придать этим измерениям больший вес по сравнению с измерениями, имеющими меньшую ошибку.
Эффективные времена передачи (т.е. время поступления) определяются на антеннах базовой станции. Использование большого количества мобильных станций может способствовать уменьшению ошибок благодаря процедурам усреднения. При этом предполагается, что смещения системы можно устранить или уменьшить выбором надлежащего измерения или посредством других процедур оценки смещения.
Вопросы, касающиеся достаточной активности мобильной станции для поддержки хронирования (например, в ранние утренние часы), можно решать, помещая мобильные станции в разные места и периодически делая вызовы. Однако они не должны быть фиксированными активами.
Обычные ошибки хронирования, обусловленные обработкой ГСП на одной мобильной станции, могут составлять порядка 10-30 наносекунд. Таким образом, могут преобладать другие источники ошибки, например многолучевое распространение.
От стабильности генератора базовой станции зависит, насколько часто нужно производить и распространять измерения хронирования. Можно использовать множество измерений с мобильных станций, чтобы точно определить не только мгновенную частоту генератора базовой станции, но также моменты более высокого порядка, например скорость изменения этой частоты. Согласно рассмотренному выше обычно происходит так, что аппроксимацию простой кривой зависимости частоты базовой станции от времени можно поддерживать с чрезвычайно высокой точностью в течение длительных периодов времени.
Хотя способы и устройства, отвечающие настоящему изобретению, были описаны применительно к спутникам ГСП, очевидно, что идеи изобретения в равной степени применимы к системам позиционирования, в которых используются псевдоспутники или спутники в сочетании с псевдоспутниками. Псевдоспутники - это наземные передатчики, которые вещают ПШ код (аналогичный сигналу ГСП), модулирующий сигнал несущей L-диапазона, обычно синхронизированный со временем ГСП. Каждому передатчику может быть присвоен уникальный ПШ код, чтобы удаленный приемник мог его идентифицировать. Псевдоспутники полезны в случаях, когда сигналы ГСП от орбитального спутника могут быть недоступны, например в туннелях, шахтах, зданиях или других закрытых помещениях. Используемый здесь термин «спутник» охватывает псевдоспутники или эквиваленты псевдоспутников, а используемый здесь термин «сигналы ГСП» охватывает ГСП-подобные сигналы от псевдоспутников или эквивалентов псевдоспутников.
В вышеприведенном описании изобретение было описано применительно к спутниковой системе глобального позиционирования Соединенных Штатов. Очевидно, что эти способы в равной степени применимы к аналогичным спутниковым системам позиционирования, в частности российской системе Glonass и проектируемой европейской системе Galileo. Система Glonass отличается от системы ГСП главным образом тем, что передачи разных спутников можно отличить друг от друга благодаря использованию немного отличающихся частот несущих, а не благодаря использованию разных псевдослучайных кодов. В этом случае, применимы, по существу, все вышеописанные схемы и алгоритмы. Используемый здесь термин «ГСП» охватывает такие альтернативные спутниковые системы позиционирования, включая российскую систему Glonass и проектируемую европейскую систему Galileo.
В вышеприведенном описании изобретения изобретение было описано со ссылкой на конкретные иллюстративные варианты его осуществления. Очевидно, что можно предложить его различные модификации, не выходя за рамки сущности и объема изобретения, заданные нижеприведенной формулой изобретения. Соответственно, описание изобретения и чертежи следует рассматривать в иллюстративном смысле, а не в ограничительном смысле.
Изобретение относится к области систем сотовой связи, в частности к системам, в которых определяется местоположение мобильной станции сотовой связи. Способ прогнозирования передачи базовой станции в системе сотовой связи заключается в том, что принимают первый временной тег для первой метки хронирования в первом сигнале сотовой связи, переданном с базовой станции. Принимают второй временной тег для второй метки хронирования во втором сигнале сотовой связи, переданном с базовой станции. Вычисляют частоту, связанную с базовой станцией, с использованием первого и второго временных тегов. Каждый из временных тегов определяют с использованием, по меньшей мере, одного сигнала спутниковой системы позиционирования, принятого на мобильной станции, которая принимает соответствующую метку времени. Техническим результатом является увеличение точности вычисления позиции мобильной станции. 4 н. и 25 з.п. ф-лы, 11 ил.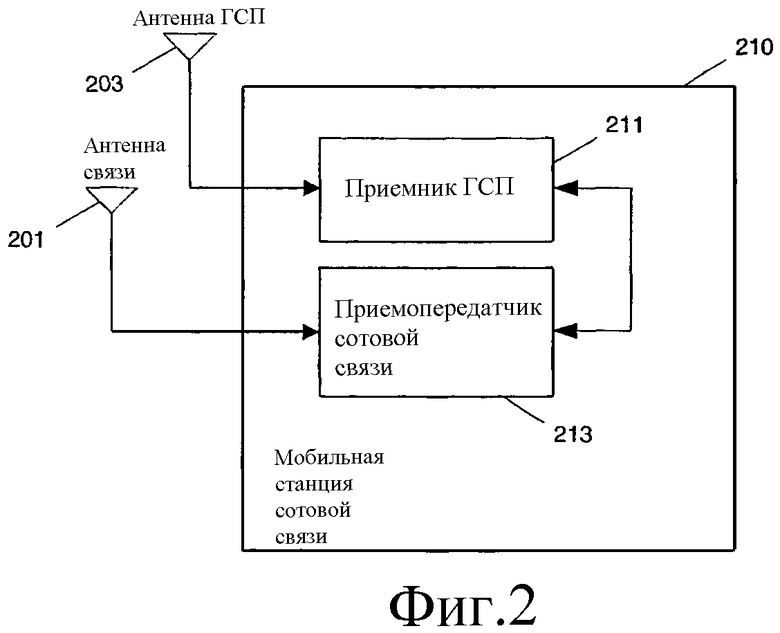
a) по стандарту связи GSM,
b) по японскому стандарту связи PDC,
c) по японскому стандарту связи PHS,
d) по стандарту аналоговой связи AMPS,
e) по североамериканскому стандарту связи IS-136 или
f) no стандарту несинхронизированной широкополосной связи с расширением по спектру МДКР.
сервер, подключенный к первой и второй мобильным станциям посредством линий связи, причем первый сотовый приемопередатчик передает первый временной тег и первое местоположение на сервер по линии связи, второй сотовый приемопередатчик передает второй временной тег и второе местоположение на сервер по линии связи, сервер объединяет местоположение базовой станции с первым и вторым временными тегами и первым и вторым местоположениями для вычисления первой частоты, связанной с базовой станцией.
a) по стандарту связи GSM,
b) по японскому стандарту связи PDC,
c) по японскому стандарту связи PHS,
d) по стандарту аналоговой связи AMPS,
e) по североамериканскому стандарту связи IS-136 или
f) по стандарту несинхронизированной широкополосной связи с расширением по спектру МДКР.
| СПОСОБ КОДОВРЕМЕННОГО РАЗДЕЛЕНИЯ КАНАЛОВ В ПОДВИЖНЫХ СИСТЕМАХ РАДИОСВЯЗИ | 1996 |
|
RU2123763C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ | 1996 |
|
RU2137150C1 |
| СПОСОБ И СИСТЕМА С МНОГОКАНАЛЬНЫМ ДОСТУПОМ И СПЕКТРОМ РАСШИРЕНИЯ СООБЩЕНИЯ ДЛЯ ИНФОРМАЦИОННЫХ СИГНАЛОВ МЕЖДУ МНОЖЕСТВОМ СТАНЦИЙ С ИСПОЛЬЗОВАНИЕМ КОДОВОГО РАЗДЕЛЕНИЯ СИГНАЛОВ СВЯЗИ СПЕКТРА РАСШИРЕНИЯ | 1991 |
|
RU2104615C1 |
| 0 |
|
SU176285A1 | |
| ЭЛЕВАТОР | 1994 |
|
RU2098024C1 |

