Настоящая заявка сопутствует заявке на патент США номер....... (номер дела поверенного Е8699) на "Способ и устройство для уменьшения комплексной комбинаторной разновременности и приемник с оценкой последовательности", изобретатели Джоан Скольд и Пер-Олф Эриксон, поданной одновременно с настоящей заявкой. Права на упомянутую заявку переуступлены тому же заявителю, что и в настоящей заявке. Данная ссылка рассматривается, как включение упомянутой заявки полностью в настоящую заявку.
Область изобретения
Настоящее изобретение относится в общем к демодуляции радиосигналов с цифровой модуляцией, принимаемых многими антеннами, и более конкретно - к комбинированию принимаемых на разнесенные антенны радиосигналов, подверженных многопутевому затуханию, рассеянию (дисперсии) во времени и интерференции.
Предпосылки изобретения
Обычной проблемой, существующей при радиопередаче сигналов, является то, что иногда сигналы теряются в результате многопутевого затухания и интерференции, существующих в каналах радиопередачи. В дальнейшем термины "канал радиопередачи", "радиоканал" и "канал" используются, как эквивалентные ссылки на один и тот же предмет. Имеется два основных многопутевых эффекта: равномерное затухание и дисперсия во времени. Равномерное затухание возникает при взаимодействии передаваемого сигнала или главного луча с его эхо, или отражениями, поступающими в приемник примерно в то же самое время. При наличии большого числа отражений равномерное затухание отвечает релеевскому распределению. Дисперсия во времени возникает, когда разные эхо задерживаются по отношению к главному лучу. В окружающем радиопространстве могут также существовать источники сигналов, не ортогональных желаемому сигналу. Неортогональные или интерферирующие сигналы часто приходят от радиоисточников, работающих на той же частоте (т.н. интерференция с совпадающими каналами), или от радиоисточников, работающих на близких частотных полосах (т.н. интерференция с соседними каналами); далее источники неортогональных сигналов упоминаются, как интерферирующие.
Известным способом уменьшения релеевского затухания является использование приемника, снабженного двумя или несколькими взаимно разнесенными антеннами, например, как это описано в "Основах конструирования мобильных систем связи" Вильямом С.Ю. Ли, Говард В. Само и Ко., Индиана, США (Mobile Communications Design Fundamentals by William C.Y. Lee, Howard W. Sams & Co., Indiana, USA). В разделе 3.5.1 этой книги приведено несколько примеров, описывающих, как можно скомбинировать сигналы от двух приемных усилителей с раздельными антеннами для противодействия затуханию. Подобная техника обычно именуется комбинированием приема на разнесенные антенны.
Дисперсия во времени может быть успешно скорректирована применением компенсатора. При цифровой модуляции сигнала можно использовать компенсатор оценки наибольшего правдоподобия последовательности (MLSE), такой, как описан в "Цифровых системах связи, 2 изд." Джоном Г. Проакисом, Мак-Гроу Хилл Бук Компани, Нью Йорк, США, 1989 г. (Digital Communications, 2nd Ed., by John G. Proakis, Mc-Graw Hill Book Company, New York, N.Y., USA, 1989). В разделе 6.7 этой книги описаны различные способы детектирования сигналов, искаженных дисперсией во времени либо интерференцией между символами (ISI), с помощью компенсации оценки наибольшего правдоподобия последовательности (MLSE).
Влияние интерференции с другими сигналами может быть уменьшено использованием техники антенных решеток с многими антеннами. Например, для "управления" установкой нуля диаграммы направленности антенны в направлении интерферирующего источника можно использовать адаптивное формирование луча.
Недавно были предложены способы, частично решающие проблему многопутевого затухания и интерференции. В патенте США US 5.191.598 Бакштрома и др., например, задача аккуратного детектирования сигналов при наличии равномерного затухания и дисперсии во времени решается применением алгоритма Витерби (Viterbi) с передаточной функцией, определенной для каждой антенны. Ссылка на патент США US 5.191.598 рассматривается как включение его полностью в настоящую заявку.
Способ аккуратного детектирования сигналов при наличии равномерного затухания и интерференции описан в IEEE Трудах по технологии передачи, том 42, No. 4, ноябрь 1993, в статье Дж.Х. Винтерса "Прием и сопровождение сигнала с помощью адаптивных антенных решеток в цифровой мобильной радиосистеме IS-54 с равномерным затуханием (IEEE Transactions on Vehicular Technology, vol.42. No.4, Nov. 1993, J.H. Winters: "Signal Acquisition and Tracking with Adaptive Arrays in the Digital Mobile Radio System IS-54 with Flat Fading").
В реальных системах радиосвязи равномерное затухание, дисперсия во времени и интерференция обычно сосуществуют. Хотя упомянутые выше приемы и направлены на решение некоторых из этих проблем, существует потребность одновременного и совместного противодействия равномерному затуханию, дисперсии во времени и интерференции.
Существо изобретения
С учетом приведенных предпосылок целью настоящего изобретения является совместное противодействие и исправление одновременно существующих равномерного затухания, дисперсии во времени и интерференции.
Предлагается способ генерирования и передачи сигнала, несущего передаваемую последовательность символов, и приема сигнала на одну или несколько антенн. Сигнал обрабатывается, образуя выборки принимаемого сигнала для каждой антенны. Для каждой антенны определяются характеристики соединения канала. Определяется также функция корреляции ослабления. С использованием полученных выборок принимаемого сигнала, характеристики соединения канала и функции корреляции ослабления в мостовом метрическом процессоре формируют метрику плеч моста. Эта метрика используется в алгоритме определения последовательности для определения переданной последовательности символов.
В одном из вариантов осуществления изобретения метрика плеч моста формируется путем генерации гипотетической последовательности символов и ее фильтрации с применением полученной характеристики соединения канала с получением в результате гипотетических выборок принимаемого сигнала для каждой антенны. При вычитании гипотетических выборок принимаемого сигнала из выборок принятого сигнала получают гипотетический сигнал ошибки, на основе которого вместе с функцией корреляции ослабления формируют указанную метрику.
В другом варианте осуществления изобретения определение функции корреляции ослабления осуществляют при генерации последовательности символов, полученной опытным путем, с последующей фильтрацией с применением полученной характеристики соединения канала с получением в результате опытных выборок принимаемого сигнала для каждой антенны. При вычитании опытных выборок принимаемого сигнала из выборок принятого сигнала получают опытный сигнал ошибки, на основе которого вместе с функцией ослабления корреляции формируют поправку к функции корреляции ослабления.
Еще в одном варианте осуществления изобретения метрику плеч задают путем генерации гипотетической последовательности символов и предварительного расчета значений для всех гипотетических последовательностей символов с использованием характеристик соединения канала и функции корреляции ослабления. Для задания метрики плеч предварительно рассчитанные величины обрабатываются совместно с выборками из принимаемых сигналов.
В следующем варианте осуществления изобретения метрика плеч задается путем генерации гипотетической последовательности символов и комбинирования выборки принимаемых сигналов с характеристиками соединения канала и функцией корреляции ослабления для получения метрических множителей, используемых при обработке гипотетических последовательностей символов для получения метрики.
Предложено также устройство, содержащее цифровой передатчик, генерирующий и передающий сигнал, несущий передаваемую последовательность символов, приемник, принимающий упомянутый сигнал на одну или несколько антенн, аналого-цифровой (A/D) конвертер, преобразующий принимаемый сигнал в выборки принимаемого сигнала для каждой антенны, определитель характеристики соединения канала, служащий для определения характеристик соединения канала для каждой антенны и определитель функции корреляции ослабления, служащий для определения функции корреляции ослабления. Устройство содержит также мостовой метрический процессор, связанный с определителями характеристики соединения канала, определителем функции ослабления корреляции и выборками принимаемых сигналов, для получения метрики плеч с использованием выборки принимаемых сигналов, характеристик соединения канала и функций корреляции ослабления. Выход процессора метрики плеч связан с процессором определения последовательности, который производит определение упомянутой последовательности передаваемых символов.
В другом варианте осуществления изобретения процессор метрики плеч содержит генератор последовательности символов, вырабатывающий гипотетическую последовательность символов, связанный с цифровым фильтром, фильтрующим эту последовательность с помощью характеристик соединения канала для получения гипотетических выборок принимаемого сигнала для каждой антенны. Фильтры связаны со средством вычитания гипотетических выборок принимаемого сигнала из выборок из принятого сигнала, производящим гипотетические сигналы ошибки, связанным со средством обработки гипотетических выборок принимаемого сигнала вместе с функцией корреляции ослабления, задающим указанную метрику.
Предложен также еще один вариант осуществления изобретения, в котором определитель функции корреляции ослабления содержит генератор последовательности символов, полученной опытным путем, связанный с цифровым фильтром, фильтрующим эту последовательность с помощью характеристик соединения канала, для получения опытных выборок принимаемого сигнала для каждой антенны. Выходы фильтров связаны со средством вычитания опытных выборок принимаемого сигнала из выборок принятого сигнала, производящим опытные сигналы ошибки, связанным со средством обработки опытных выборок принимаемого сигнала вместе с функцией корреляции ослабления, для получения поправки к функции корреляции ослабления.
Эти и другие признаки и преимущества настоящего изобретения могут быть ясны лицу, имеющему обычные познания в данной области техники, из настоящего описания и чертежей, в которых одинаковые ссылочные обозначения относятся к одинаковым элементам.
Краткое описание чертежей
Фиг.1 схематически иллюстрирует цифровую систему радиосвязи.
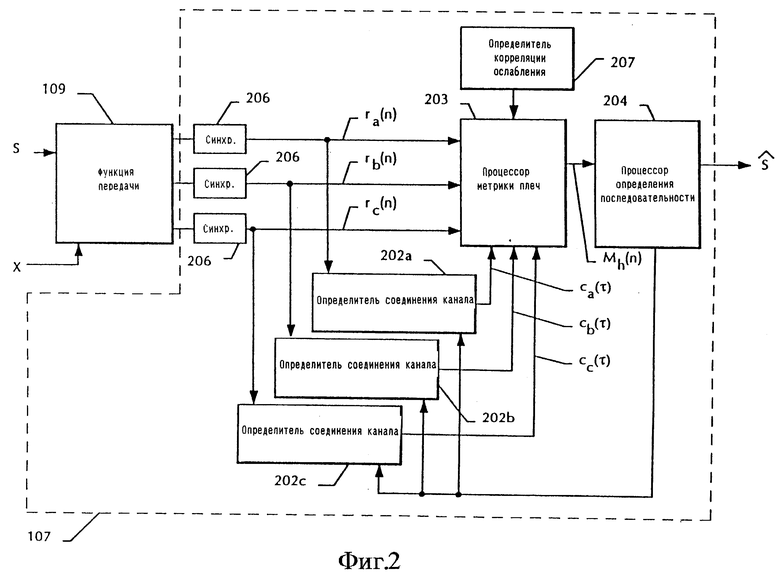
Фиг. 2 схематически иллюстрирует процессор приемника и функцию передачи согласно настоящему изобретению.
Фиг.3 схематически иллюстрирует функцию передачи.
Фиг.4 схематически иллюстрирует процессор метрики плеча.
Фиг. 5 схематически иллюстрирует настраиваемый определитель функции корреляции ослабления.
Фиг. 6 схематически иллюстрирует еще один вариант осуществления процессора метрики плеча согласно настоящему изобретению.
Фиг. 7 схематически иллюстрирует другой вариант осуществления процессора приемника и функции передачи согласно настоящему изобретению.
Фиг. 8 схематически иллюстрирует еще один вариант осуществления процессора приемника и функции передачи согласно настоящему изобретению.
Описание осуществления изобретения
В нижеследующем описании в целях объяснения, но не ограничения объема, приводятся конкретные детали, такие, как отдельные цепи, компоненты цепей, приемы (техника) и т.д., для обеспечения ясного понимания изобретения. Однако лицу, имеющему обычные познания в данной области техники, очевидно, что настоящее изобретение может быть осуществлено и в других вариантах, отличающихся от описанных отдельными деталями. В иных случаях здесь опущено подробное описание хорошо известных способов, устройств и цепей, чтобы не утяжелять описание настоящего изобретения ненужными подробностями.
Система, содержащая радиопередатчик и приемник, используемая в системах радиосвязи, схематически проиллюстрирована на фиг. 1. Система радиосвязи может работать с использованием множественного доступа с разделением частоты (FDMA), множественного доступа с разделением времени ((TDMA), множественного доступа с разделением кодов (CDMA) или их комбинаций. Передатчик имеет генератор цифровых символов 102, принимающий сигнал 101, несущий информацию и генерирующий соответствующую последовательность цифровых символов S. Символы S подвергаются цифро-аналоговому (D/A) преобразованию, модуляции, фильтрации формы импульсов, усилению и в качестве аналогового сигнала Y передаются цифровым передатчиком 103 в соответствии с известными приемами.
В дополнение к тепловому шуму, может существовать также интерферирующий источник 108, передающий сигнал X, который может быть неортогонален сигналу Y. Сигналы X и Y распространяются по различным радиоканалам и перехватываются антеннами 104 количеством D.
Радиоблоки 105 усиливают, преобразуют и фильтруют принимаемые сигналы согласно известным способам получения аналоговых сигналов. Каждый аналоговый сигнал связан с аналого-цифровым преобразователем (A/D) 106, преобразующим аналоговый сигнал в поток выборок из принимаемых сигналов rd(kTs), где Ts - период образцов, величина k - целое число, а нижний индекс d указывает, что сигнал поступает с антенны, имеющей номер d, причем 1 ≤ d ≤ D. Период выборки Ts может быть менее периода символов Т. Принимаемые потоки выборок из сигналов собираются в процессоре 107, который обрабатывает эти потоки, определяя поток передаваемых цифровых символов Sо. Далее в описании используется выражение "функция передачи 109'' в качестве общей ссылки на путь сигнала через цифровой передатчик 103, канал радиопередачи (не показанный на фиг.1), антенны 104, радиоблоки 105 и A/D 106.
Процессорный блок 107 более подробно показан на фиг.2, где для упрощения число антенн D ограничено тремя, обозначенными a, b и с. Процессорный блок 107 может быть, например, процессором цифровых сигналов (DSP), таким, как TMS320C50, выпускаемым фирмой Техас Инструментс (Texas Instruments). Функцией процессорного блока 107 является определение потока Sо передаваемых цифровых символов, который бы хорошо соответствовал последовательности S первоначально переданных символов.
Функция передачи 109 производит потоки ra(kTs), rb(kTs) и rc(kTs) выборок из принимаемого сигнала, посылаемые на процессорный блок 107, где они обрабатываются в соответствии с настоящим изобретением. Потоки ra(kTs), rb(kTs) и rc(kTs) выборок из принимаемого сигнала соединяются в предпроцессоре сигналов или синхронизаторе (sync), блок 206, где потоки выборок из принимаемого сигнала коррелируются с известными временно-синхронизирующими последовательностями, как это описано, например, Джованна и др. в статье "Быстро перестраиваемые эквилайзеры для узкополосных TDMA мобильных радиосистем", IEEE Труды по технологии передачи, том 40, No. 2, май 1991, стр. 392-404 (IEEE Transactions on Vehicular Technology, vol. 40, No. 2, May 1991, pp. 392-404: Giovanna et al. "Fast Adaptive Equalizers for Narrow-Band TDMA Mobile Radio"), Для случаев демодуляции разнесенных символов, если период выборки Ts меньше периода символов Т, пред-процессор сигналов 206 выполняет десятичное преобразование потоков ra(kTs), rb(kTs) и rc(kTs) выборок из принимаемого сигнала, образуя одну выборку на символ, обозначенную, соответственно, ra(n), rb(n) и rc(n). Для случая демодуляции разнесенных фракций, генерируется более одной выборки на символ.
Определяющие цепи 202а, 202b и 202с вырабатывают характеристики соединения канала ca(τ), cb(τ) и cc(τ) используемые для моделирования радиопередающего канала, соответствующего каждой конкретной антенне. Первоначальная характеристика соединения канала может быть получена из величин наименьшего квадратичного отклонения корреляции синхронизации согласно известным приемам. Если должны быть отслежены каналы, обычно используют получаемые данные и временные определения величин, генерируемых процессором 204 определения последовательностей. Лицам, сведущим в данной области техники, отслеживание каналов известно, например, из ранее упоминавшегося издания "Цифровые системы связи, 2 изд." Джона Г. Проакиса, и работы А.П. Кларка и С. Харихарана "Перестраиваемые определители канала для высокочастотного радиосоединения", IEEE Труды по связи, том 37, стр. 918-926, сентябрь 1989 (A. P. С] ark and S. Hariharan, "Adaptive Channel Estimates for an HF Padio Link", IEEE Trans. on Communications, vol. 37, pp. 918-926, Sept. 1989). Характеристики соединения канала ca τ , cb τ и cc τ подаются на вход мостового метрического процессора 203.
На вход мостового метрического процессора 203 подается также функция корреляции ослабления, получаемая от определителя 207 функции корреляции ослабления. Определение функции корреляции ослабления включает обработку информации о функции корреляции ослабления между антеннами 104, или между относительными фазами выборок, как это более подробно будет описано ниже. Определитель функции корреляции ослабления использует функции корреляции ослабления для поправки и возможного отслеживания определения функции корреляции ослабления, как это более подробно будет описано ниже в тексте и со ссылкой на чертежи.
Мостовой метрический процессор 203 использует выборки принимаемого сигнала ra(n), rb(n) и rc(n), характеристики соединения канала ca(τ), cb(τ) и cc(τ) и определение функции корреляции ослабления, вырабатывая метрику моста Mh(n). Эта метрика моста используется, например, в процессоре 204 определения последовательности для выработки временных и конечных определений передаваемых символов.
Для лица, имеющего обычные познания в данной области техники, является понятным, как работает изобретение при использовании разнесенных фракций (Т/М). В этом случае каждый предпроцессор 206 сигнала вырабатывает М выборок на период символа, что соответствует М разным фазам выборок. При этом создается М потоков выборок из принимаемого сигнала на антенну. В результате мостовой метрический процессор 203 получает D раз по М потоков выборок. Как и ранее, определяющие цепи 202a-202c вырабатывают характеристики соединения канала, соответственно, для антенн a-c. Однако в этом случае определяющих цепей больше, поскольку требуется определение для каждой фазы выборки. Аналогично определитель 207 функции корреляции ослабления определяет функцию корреляции ослабления по антеннам и по фазам выборки. При этом D антенн и М фаз выборки рассматриваются как взятые D раз М антенн, В результате мостовой метрический процессор работает в режиме, эквивалентном наличию D раз М антенн и одной выборки на символ. Очевидно также, что настоящее изобретение может быть использовано в случае одной принимающей антенны и при использовании разнесенных фракций.
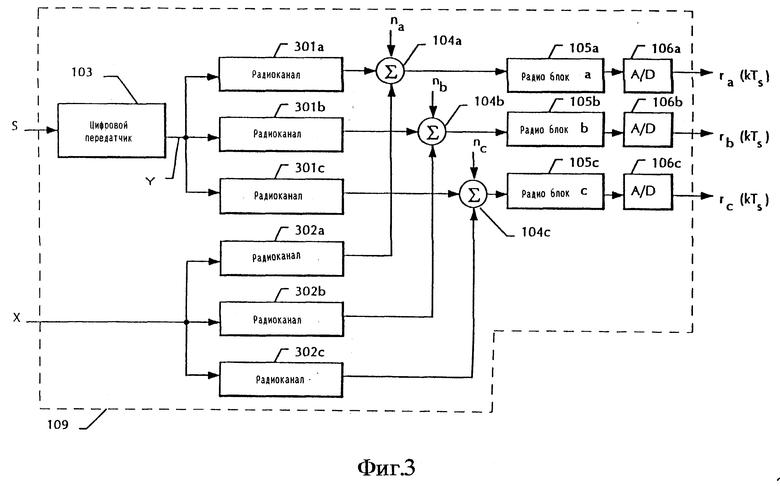
Функция передачи 109 более подробно иллюстрируется на фиг. 3, где для упрощения число интерферирующих источников сокращено до одного. Для лица, сведующего в данной области техники, очевидно, что настоящее изобретение может также быть использовано в случаях, когда имеется два или более интерферирующих источников. Функция передачи 109 начинается с пути сигнала для последовательности S символов через цифровой передатчик 103, который передает аналоговый сигнал Y. Аналоговый сигнал Y распространяется через отдельные радиопередающие каналы к каждой из трех принимающих антенн: радиоканал 301а на принимающую антенну 104а, радиоканал 301b на принимающую антенну 104b и радиоканал 301с на принимающую антенну 104с. Аналогично интерферирующий сигнал X также распространяется по трем другим отдельным радиоканалам 302а-302с соответственно к принимающим антеннам 104а-104с. Радиоканалы 301а-301с и 302а-302с могут вносить затухание и дисперсию во времени. Всегда присутствующие тепловые шумы na-nc также принимаются соответственно антеннами 104а-104с. Каждая антенна 104а-104с связана соответственно с радиоблоком 105а-105с, который усиливает, преобразует и фильтрует принимаемые сигналы согласно известным приемам получения аналогового сигнала. Каждый аналоговый сигнал связан с аналого-цифровым (A/D) преобразователем 106а-106с, который преобразует аналоговые сигналы в потоки выборок из принимаемого сигнала ra(kTs), rb(kTs) и rc(kTs). Одним из методов преобразования аналогового в цифровой сигнал является использование логарифмически-полярной обработки сигнала, описанной в патенте США US 5.048.059 Дента, включаемого во всем его объеме в настоящее описание посредством ссылки. Для последующей обработки осуществляется преобразование логарифмически-полярного сигнала в прямоугольные, так что используются, например, сигналы I и Q, упоминаемые иногда, как комплексные величины. При первоначальном применении обработки логарифмически-полярного сигнала можно использовать приемник с ограничением, выдающий величину и фазу сигналов, что упрощает адаптивное управление усилением.
В MLSE эквилайзере анализируются все возможные последовательности S передаваемых символов. В одном из вариантов осуществления изобретения гипотетические значения символов Sh(n) фильтруются с помощью функций оценки ответвлений каналов ca(τ), cb (τ) и cc(τ) при этом получаются гипотетические выборки принимаемых сигналов rah(n), rbh(n) и rch(n) для каждой антенны. Разница между гипотетическими rah(n)-rch(n) и фактически принимаемыми ra(n)-rc(n) потоками сигналов, именуемая гипотетической ошибкой, является оценкой приемлемости соответствующей гипотезы. Величина среднеквадратичного отклонения гипотетической ошибки используется в качестве метрики для оценки конкретной гипотезы.
Метрики для различных гипотез аккумулируются и с помощью алгоритма оценки последовательностей определяется, какая из гипотез является наилучшей. Этот процесс может быть эффективно реализован с помощью алгоритма Витерби, известного в динамическом программировании. Описание алгоритма Витерби можно найти в статье Формей Г. "Алгоритм Витерби", Труды IEEE (Formey G. "The Viterbi Alogorithm" Proc. of the IEEE), том 61, стр. 268-278, март 1973 г. Для лица, имеющего обычные познания в данной области техники, очевидно, что могут использоваться и другие алгоритмы оценки последовательностей, например М-алгоритм.
В MLSE эквилайзере имеются состояния, соответствующие различным гипотетическим последовательностям символам Sh(n). Для каждого приближения существуют предыдущие состояния, каждое из которых ассоциируется с аккумулированной метрикой. Каждая пара предыдущего состояния с текущим состоянием отражается в метрике ветви Mh(n). Предполагаемой метрикой текущего состояния явится тогда сумма метрики плеча Mh(n) и ранее аккумулированной метрики. Для каждого текущего состояния в качестве предшествующего состояния отбирается то предыдущее состояние, которое имеет наименьшую предполагаемую метрику, и наименьшая предполагаемая метрика становится аккумулированной метрикой для текущего состояния. Для комбинирования метрик, описанного в вышеупомянутом патенте США 5.191.598, метрика плеча может быть выражена как:
Mh(n) = [r(n)-Csh(n)]H D[r(n)-Csh(n)],
где r(n) = [ra(n)rb(n)rc(n)]
Функции оценки ответвлений каналов для каждого сигнала, принимаемого на антенны 104а-104с обозначаются ca( τ , cb(τ) и cc(τ) соответственно, где τ обозначает задержку (т.е. τ = 0 для главного луча, τ = 1 для первого эхо и т. д. ). Nt обозначает число ответвлений каналов на антенну и Ka, Kb, Kc обозначают весовые коэффициенты соответственно для антенн 104а-104с.
В настоящем изобретении используется преимущество того, что с точки зрения комбинирования и сравнения, ослабление сигналов (интерференция + шумы) на разнесенных принимающих антеннах зачастую коррелируется. Развитие комбинаторной техники с использованием этой корреляции позволяет получить значительные преимущества. Для оптимальной работы может быть использован процесс декорреляции или "обеления", а оптимальная метрика ветви может включать инверсию матрицы корреляции ослабления. В соответствии с настоящим изобретением оптимальной метрикой плеча является:
Mh(n) = [r(n)-C(n)Sh(n)]H A(n)[r(n)-C(n)Sh(n)] = eh H(n)A(n)eh(n)
где A(n) = Rzz(n)-1, или соответствующая величина;
Rzz(n) = E(z(n)zH(n));
z(n) = [za(n)zb(n)zc(n))T;
eh(n) = r(n)-C(n)Sh(n).
На разницу каналов во времени и корреляцию ослабления указывает индекс n. Матрица Rzz(n) является матрицей корреляции ослабления в дискретном времени, n. Матрица А(n) (т.е. матрица А) представляет собой инверсию матрицы Rzz(n), или соответствующую сопряженную величину, или псевдоинверсию. Как очевидно для лица, сведующего в данной области техники, Rzz(n) и А(n) представляют собой конкретные примеры свойств корреляции ослабления, другие примеры которых также известны. В последующем термин "матрица А" используется в его широком значении для обозначения любого определения свойств корреляции ослабления.
Ослабление на антеннах 104а-104с во время n обозначается соответственно za(n), zb(n) и zc(n). Для данной гипотезы eh(n) служит оценкой процесса ослабления. Как было показано выше, матрица А, А(n) является инверсией матрицы Rzz(n). Для случая нескоррелированного ослабления (т.е. при отсутствии интерферирующего источника) матрица А вырождается в диагональную матрицу D. Если сигнал известен или он определен правильно, ослабление характеризуется:
z(n) = r(n)-C(n)Sdet(n)
где Sdet(n) = [Sdet(n)Sdet(n-1)...]T
Заметим, что Sdet(n) в каждый момент времени n является известной или определенной последовательностью символов.
Определение матрицы А, используемой в настоящем изобретении, может быть выполнено многими путями в зависимости от конкретного применения и требуемого выполнения. Простейшим приближением является использование для матрицы А фиксированных величин, содержащихся в памяти и не обновляемых. Такие величины прежде всего зависят от конфигурации принимающих антенн и от используемых несущих частот. Другой подход заключается в определении матрицы А из информации о синхронизации и сохранении величин матрицы А постоянными между этапами синхронизации. При каждом новом появлении поля синхронизации матрица А вычисляется заново, с использованием предыдущих значений величин матрицы, или без использования последних. Еще один подход заключается в использовании полей синхронизации для инициализации или уточнения величин матрицы А и затем в использовании решений, принятых по данным о характеристиках полей, для определения величин матрицы А.
Следует уделить внимание методам, используемым для определения величин матрицы А. Поскольку матрица А содержит информацию относительно свойств корреляции ослабления, могут быть использованы стандартные методы определения корреляции или применены инверсные корреляционные матрицы. Используя известные, или измеренные величины символов, величины ослабления могут быть получены из разности выборок потоков фактически принимаемых сигналов ra(n) - rc(n) и гипотетических принимаемых сигналов rah(n) - rch(n).
В каждый момент времени n она дает вектор величины ослабления, обозначаемый z(n); по одному значению для каждой антенны. Прямой путь формирования матрицы А дается уравнением:
R(n) = λ R(n-1) + Kz(n)zH(n),
А(n)= R-1(n),
K является масштабирующей константой, обычно 1 или V (1- λ ). Поскольку R(n) является эрмитовой матрицей, требуется вычисление только части элементов матрицы.
Подобный прямой путь отличается высокой сложностью вычислений. Одной из возможностей уменьшить эту сложность является применение леммы инверсии матриц для получения матрицы А непосредственно из:
где p(n) = А(n-1)z(n).
Поскольку матрица А является эрмитовой, достаточно вычислить диагональные элементы матрицы и элементы, расположенные либо над диагональю, либо под ней.
Описанная выше техника определения и отслеживания матрицы А приведена только в иллюстративных целях. В общем, матрица А может быть выражена и определена рядом путей, как это должно быть очевидно лицу, имеющему обычные познания в данной области техники. См., например, книгу С.Хайкина "Теория адаптивных фильтров", Прентис-Холл, Инглевуд Клифс, Нью-Джерси (S.Haykin, Adaptive Filter Theory, Prentice-Hall, Englewood Cliffs, N.J.), второе издание, 1991. Настоящее изобретение может также быть использовано и в случае эквилизации "вслепую", когда не имеется известных синхронизирующих последовательностей. В этом случае матрицу А определяют тем же путем, что и характеристики каналов.
Далее настоящее изобретение в целях иллюстрации будет описано более подробно в четырех различных вариантах осуществления.
Описание варианта осуществления, имеющего эквилайзер разделенных символов с двумя антеннами и с адаптивными определителями каналов
В первом варианте осуществления представлен процессор 107 имеет эквилайзер разделенных символов (т.е., разделенных по Т), отслеживающий характеристики или всплески канала над фоном. Этот вариант осуществления применим в цифровой сотовой системе, определенной стандартом IS-54B, имеющей относительно долгие всплески сигнала (TDMA) или временные позиции (6,67 миллисекунд). Плечевой метрический процессор 203 этого варианта более подробно иллюстрируется на фиг. 4, где для простоты количество антенн ограничено двумя, помеченными а и b. Полезность данного варианта заключается в том, что в большинстве сотовых систем используются две принимающих антенны и уже применяется в каком то виде комбинирование сигналов от разнесенных антенн. Как и ранее, для лица, имеющего обычные знания в данной области техники, очевидно, что данный вариант может использоваться в случае трех и более антенн.
Матрица корреляции ослабления Rzz и инверсная матрица корреляции ослабления А определяются следующим образом:

Переменная Paa обозначает ослабление мощности, поступающей на антенну a; переменная Pbb обозначает ослабление мощности, поступающей на антенну b. Недиагональные матричные элементы определяют величины перекрестной корреляции: Pab обозначает корреляцию ослабления сигнала, поступающего на антенну а, сопряженную с поступающим на антенну b.
При этом метрика плеч выражается:
где  и ed,h(n) = rd(n) - rd,h(n)
и ed,h(n) = rd(n) - rd,h(n)
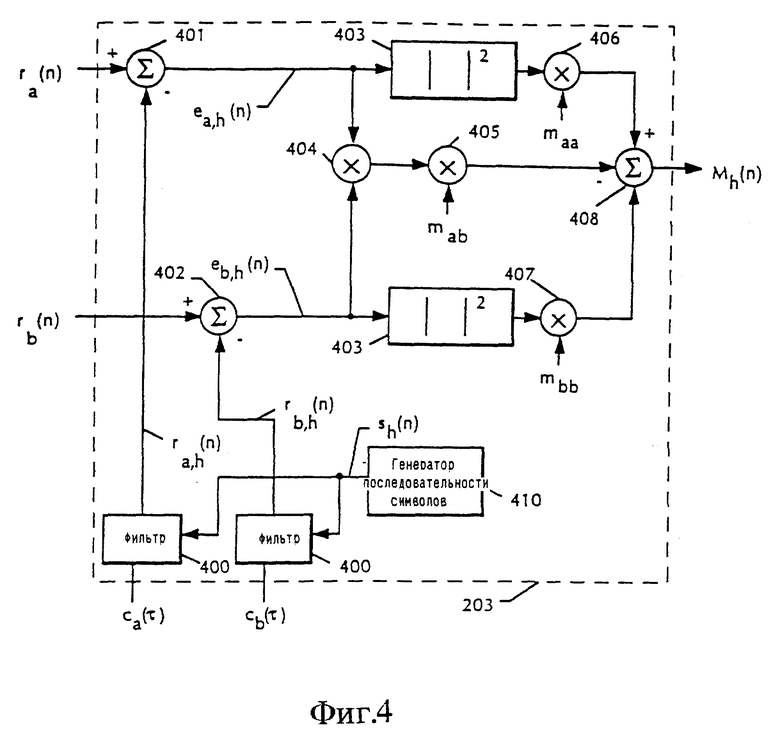
Вычисление этой плечевой метрики схематически проиллюстрировано на фиг. 4.
Генератор последовательности символов 410 вырабатывает гипотетические последовательности символов Sh(n). Эти последовательности фильтруются в фильтрах 400 с использованием определителей ветвей канала cb(τ) и ca(τ) для антенн а и b, образуя гипотетические выборки принимаемых сигналов соответственно ra,h(n) и rb,h(n). Гипотетические выборки принимаемых сигналов ra,h(n) вычитаются из выборок сигналов, фактически принятых на антенну а, ra(n), в суммирующем соединителе 401, образуя сигналы ошибки ea,h(n). Аналогично, гипотетические выборки принимаемых сигналов rb,h(n) вычитаются из выборок сигналов, фактически принятых на антенну b, rb(n), в суммирующем соединителе 402, образуя сигналы ошибки eb,h(n). Блоки 403 формируют квадратичные значения сигналов ошибки ea,h(n) и eb,h(n). Квадратичное значение сигнала ошибки ea,h(n) умножается на множитель maa в соединительном элементе 406, и результат подается на суммирующий элемент 408. Квадратичное значение сигнала ошибки eb,h(n) умножается на множитель mbb в соединительном элементе 407, и результат nfr;t подается на суммирующий элемент 408. Наконец, умножитель 404 формирует произведение ea,h(n) и e* b,h(n), которое затем умножается на множитель mab в умножителе 405, при этом учитываются только действительные части. Результат вычитается в сумматоре 408, выходом которого является метрика плеча Mh(n). Множители maa, mbb и mab связаны с матрицей корреляции ослабления следующими выражениями:
maa = wpbb
mbb = wpaa
mab = 2wpab
Как это очевидно для лица, сведующего в данной области техники, понятие w известно при расчетах метрики плеч, оно может иметь различные значения и даже может быть опущено, когда знаменатель в w приближается к нулю.
В момент времени n, элементы матрицы дополняются следующим образом:


К является нормирующим фактором, который при равенстве единице исключается из расчетов, сокращая количество операций. K может быть определен из значения λ , являющейся так называемым "фактором забывчивости".
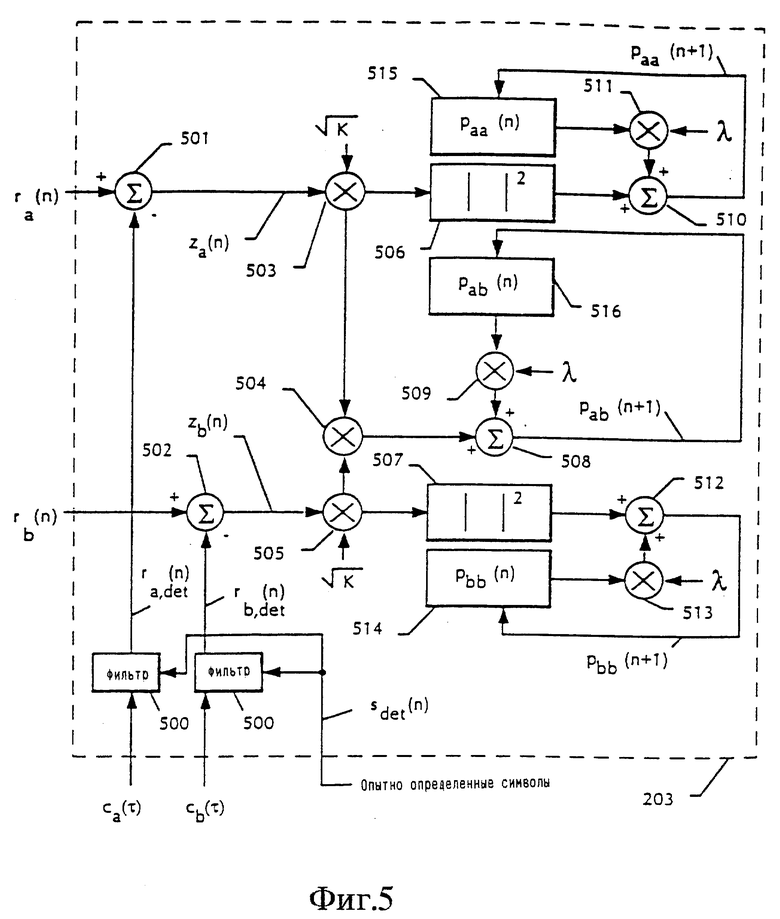
Схематическая иллюстрация дополнения матрицы корреляции ослабления приведена на фиг. 5. Временные значения Sdet(n) опытно определенных выборок, формируемые процессором 204 определения последовательности, фильтруются в фильтрах 500 с использованием значений определителей ветвей канала ca τ и cb τ , получаемых с определителей ветвей канала 202 для антенн а и b, и образуют соответственно ожидаемые принимаемые выборки ra,det(n) и rb,det(n). Сигнал ослабления Za(n)4 образуется при вычитании в суммирующем соединителе 501 значений ra,det(n) из выборки фактически полученных сигналов ra(n) с антенны а. Аналогично сигнал ослабления zb(n)4 образуется при вычитании в суммирующем соединителе 502 значений rb.det(n) из выборки фактически полученных сигналов rb(n) с антенны b. Если временные значения опытно определенных выборок правильны, и определения ветвей каналов верны, тогда сигналы ошибки za(n) и zb(n) выражают ослабление, получаемое на антеннах а и b соответственно. Сигналы ослабления za(n) и zb(n) нормируются на корень из нормирующего фактора K в умножителях 503 и 505 соответственно для получения нормированных сигналов ослабления, подаваемых соответственно на блоки 506 и 507.
Мощность ослабления paa(n), поступающая на антенну а, умножается в умножителе 511 на фактор забывчивости λ и суммируется в соединительном устройстве 510 с квадратичной величиной нормированного сигнала ослабления с блока 506, образуя скорректированное значение мощности ослабления paa(n+1). Затем величина paa(n+1) используется для перезаписи в соответствующем месте памяти 515 предыдущего значения мощности ослабления paa(n). Аналогично предыдущее значение мощности ослабления pbb(n), поступавшее на антенну b, умножается в умножителе 513 на фактор забывчивости λ и суммируется в соединительном устройстве 512 с квадратичной величиной нормированного сигнала ослабления с блока 507, образуя скорректированное значение мощности ослабления pbb(n+1), которое используется для перезаписи в соответствующем месте памяти 514 предыдущего значения мощности ослабления pbb(n). Для получения уточненной перекрестной корреляции ослабления, нормированный сигнал ошибки с умножителя 503 умножается на сопряженный нормированный сигнал ошибки с умножителя 505 в соединителе 504. Также, предшествующее значение перекрестной корреляции pab(n), хранящееся в памяти 516, нормируется на фактор забывчивости в умножителе 509. Выход соединителя 504 суммируется в соединителе 508 с выходом умножителя 509, образуя исправленное значение перекрестной корреляции pab(n+1). Как и ранее, уточненное значение перекрестной корреляции pab(n+1) используется для перезаписи в соответствующем месте памяти 514 предыдущего значения pab(n).
Обычно имеется задержка в уточнении значений ветвей канала, которое позволяло бы временно определенным символам стать реальными. В патенте США US 5.164.961 Гудмунсона и др., полностью включаемом в настоящее описание посредством ссылки, эту задержку избегают, используя многоканальные модели: по одной для каждого состояния в процессоре 204 определения последовательности. В соответствии с настоящим изобретением также имеется задержка в уточнении величин матрицы А. Лицу, имеющему обычные познания в данной области техники, должно быть очевидно, что этой задержки можно избежать, используя множественные матрицы А, по одной на каждое состояние в процессоре 204 определения последовательности.
Описание варианта осуществления, имеющего эквилайзер разделенных символов с двумя антеннами и с фиксированными определителями каналов
Во втором варианте осуществления изобретения приемник снабжен эквилайзером разделенных символов, в котором канал может рассматриваться как статический с TDMA всплесками. Этот вариант осуществления применим в цифровой сотовой системе, определенной всеевропейским стандартом GSM, имеющей относительно короткие величины временных полей TDMA (577 микросекунд). В этом случае матрица Rzz корреляции ослабления и, следовательно, матрица А, не изменяется со всплесками и может быть определена из синхронизирующего слова (пароля), включенного в обрамление GSM. В этом случае метрика плеча может быть представлена следующим образом:
Mh(n) = [r(n) - Csh(n)]H A(r(n)-Csh(n))
Mh(n) = rH(n)Ar(n) - 2Re{sh(n)HCHAr(n)} + Sh(n)HCHACsh(n)
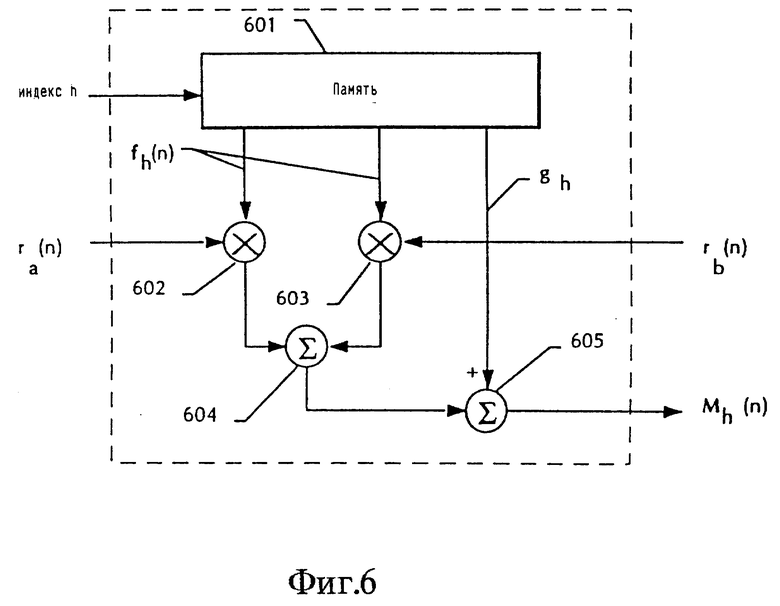
Как это проиллюстрировано на фиг. 6, экономится время обработки благодаря предварительному вычислению сохраняемых в памяти 601 следующих величин для всех возможных гипотетических последовательностей символов Sh:
fh = 2AHCsh
gh = sh HCHACsh
Используя эти предварительно вычисленные значения, можно упростить метрику плеч следующим образом:
Mh(n) = -Re{fh Hr(n)} + gh
где: r(n) = [ra(n)rb(n)]T
Для каждой гипотетической последовательности символов Sh(n), выборки принимаемых сигналов ra(n) и rb(n) умножаются, соответственно, в блоках 602 и 603 на соответствующую величину fh, которая заранее вычислена, как это описано выше, и берется из памяти 601; используются только действительные части произведений. Индекс h является индексом гипотезы, соотносящей конкретную величину fh с данной гипотетической последовательностью символов sh(n). Выход умножителей 602 и 603 связан с суммирующим соединителем 604, где они суммируются, а результат передается на соединительное устройство 605, в котором выход соединительного устройства 604 вычитается из соответствующей величины gh, которая также вычисляется заранее, как это описано выше, и поступает из памяти 601. Результатом является метрика плеча Mh(n).
Описание варианта осуществления, имеющего эквилайзер разделенных фракций, с одной или несколькими антеннами и с адаптивными определителями каналов с частичной оптимизацией
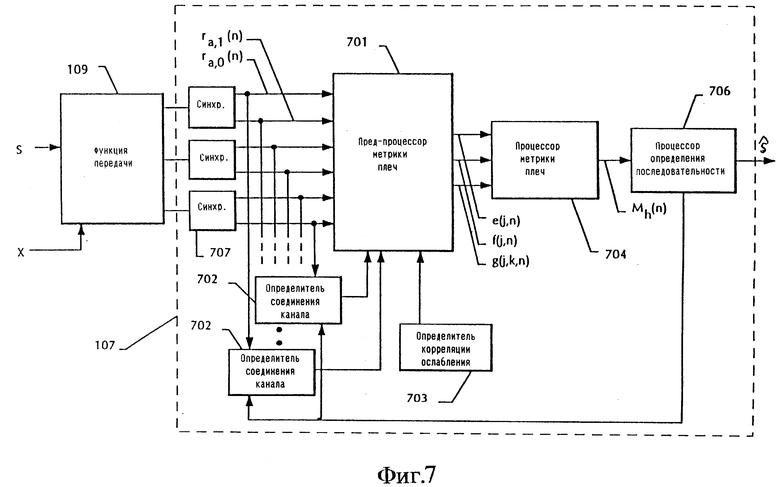
В следующем варианте осуществления изобретения имеется приемник, имеющий одну или несколько антенн, связанных с процессором 107, снабженный эквилайзером разделенных фракций (Т/М) с адаптивным построением каналов. Этот вариант осуществления применим в цифровой сотовой системе, определенной стандартом IS-54B, имеющей относительно долгие (6,67 миллисекунд) временные позиции, или всплески сигнала, так что величины, характеризующие ветви канала, должны уточняться в периоды всплесков. Процессор 107 приемника для данного варианта более подробно иллюстрируется на фиг.7, где для простоты показаны только один интерферирующий источник X и три антенны, обозначенные a, b и с, и принято, что М = 2. Для лица, имеющего обычные познания в данной области техники, очевидно, что настоящее изобретение может быть осуществлено и при нескольких интерферирующих источниках, при ином количестве антенн и при факторе разделения фракций, не равном двум. Функция передачи 109, показанная на фиг. 7, может быть, например, идентичной той, которая описана в связи с фиг. 3, производящей три потока выборок принимаемого сигнала: ra(kTs), rb(kTs) и rc(kTs). Каждый из потоков выборок принимаемого сигнала ra(kTs)-rc(kTs) связан с пред-процессором 707 сигнала, осуществляющем корреляцию с известной картиной синхронизации, подобно тому, как это описано для блока 206 в связи с фиг.2. С использованием определенного критерия оптимизации, например, максимума энергии в ветви канала, из значений корреляции определяют значения времени. Поскольку в данном варианте осуществления изобретения значение М выбрано равным двум, каждый пред-процессор 707 сигнала вырабатывает из каждого поступающего потока выборок принимаемого сигнала две выборки на символ. Например, как показано на фиг. 7, из поступающего потока выборок принимаемого сигнала ra(kTs) вырабатываются ra0(n) и ra1(n). Аналогично из поступающих потоков выборок принимаемого сигнала rb(kTs) rc(kTs) вырабатываются соответственно rb0(n), rb1(n) и rc0(n), rc01(n). Если бы, например, значение М было бы выбрано равным четырем, тогда производились бы 4 выборки на символ. Данные сигналы ra0(n), ra1(n), rb0(n), rb1(n), rc0(n) и rc01(n) подаются на плечевой метрический пред-процессор 701, где они обрабатываются, как если бы каждый сигнал ra0(n), ra1(n), rb0(n), rb1(n), rc1(n) и rc01(n) поступал бы с отдельной антенны.
На практике в целях уменьшения сложности использования (данного варианта) возможно обобщить выражение для метрики плеча и сделанные расчеты. Уменьшение сложности может быть достигнуто в двух направлениях: а) обобщением выражения для метрики плеча и подбором подходящих значений и b) изменением порядка расчетов, при котором рассчитываются приближения определенных величин. При использовании первого направления метрические множители, которые могут быть заранее рассчитаны для всех гипотез, выражаются следующим образом;
e(j,n) = cH(j,n)A(n)r(n)
f(j,n) = сH(j,n)A(n)c(n)
g(j,k,n) = сH(j,n)A(n)c(n),
где k > j,
и где c(j,n) есть j-тый столбец c(n). J есть число ветвей канала. Другими словами, вектор r(n) принимаемого сигнала моделируется следующим образом:
Величины e(j,n), f(j,n) и g(j,k,n) вычисляются плечевым метрическим пред-процессором 701 и хранятся в памяти (не показанной на фиг. 7). Индексы j и k являются индексами лучей. Величины e(j,n), f(j,n) и g(j,k,n) называются метрическими множителями, поскольку они могут быть использованы при операции умножения для получения метрик эквилайзера в плечевом метрическом процессоре 704, вычисляющем метрику плеч Mh(n) согласно выражениям:

В системах, где все величины имеют одни и те же амплитуды, таких, как бинарные системы с ключами фазового сдвига (BPSK) и четверичные системы с ключами фазового сдвига (QPSK), выражение  является константой, независимой от гипотез. Таким образом, оно может быть опущено, имея в виду необходимость вычисления и использования метрических множителей f(j,n).
является константой, независимой от гипотез. Таким образом, оно может быть опущено, имея в виду необходимость вычисления и использования метрических множителей f(j,n).
Хотя данный вариант осуществления изобретения иллюстрирован примером с тремя антеннами, лицу, имеющему обычные познания в данной области техники, должно быть очевидно, что настоящее изобретение может работать и с одной антенной с эквилизацией разделенных фракций.
Описание варианта осуществления, имеющего эквилайзер разделенных фракций, с одной или несколькими антеннами и с адаптивными определителями каналов с полной оптимизацией
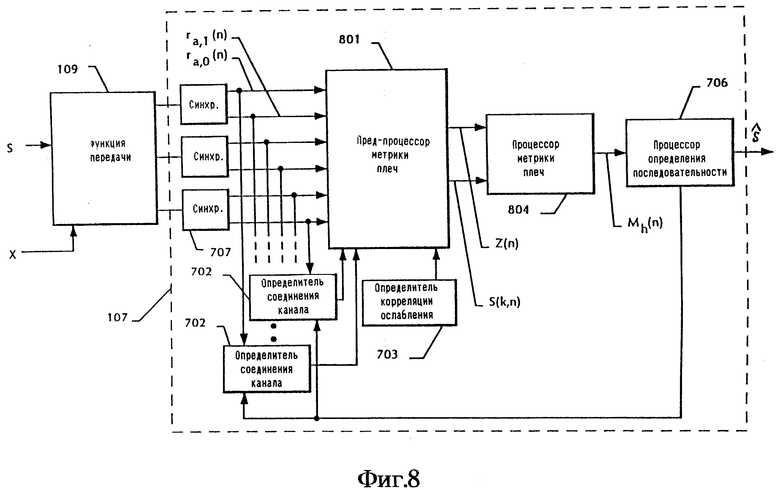
Дальнейшее уменьшение сложности может быть достигнуто при использовании процессора 107 приемника, показанного на фиг. 8. Процессор 107 приемника, показанный на фиг. 8, в своем существе идентичен изображенному на фиг.7, с отличием в плечевом метрическом пред-процессоре 801 и в плечевом метрическом пред-процессоре 804. Как показано на фиг. 8, плечевой метрический пред-процессор 801 предварительно вычисляет и сохраняет в памяти (не показанной на чертеже) следующие альтернативные метрические множители:

На практике может оказаться предпочтительным аппроксимировать A(n+j) значениями А(n) и c(j,n+j), a c(j+k,n+j) - соответственно значениями c(j,n) и c(j+k, n). Альтернативные метрические множители Z(n) и S(k,n) связаны с плечевым метрическим процессором 804, который вычисляет метрику плеч согласно выражению:
Хотя данный вариант осуществления изобретения проиллюстрирован для случая с тремя антеннами, лицу, имеющему обычные познания в данной области, должно быть очевидно, что настоящее изобретение может быть осуществлено с одной антенной и с эквилайзером разделенных фракций. Далее, хотя настоящее изобретение описано применительно к конкретной цифровой сотовой системе связи, лица, сведущие в данной области техники, поймут, что настоящее изобретение применимо и в других системах связи и, следовательно, настоящее изобретение не ограничивается конкретными вариантами осуществления, описанными и проиллюстрированными в описании. Различные варианты осуществления и их видоизменения, помимо показанных и описанных здесь, равно как и вариации, модификации, и эквивалентные осуществления могут быть разумно предложены на основе данного описания и чертежей, без отхода от существа и объема изобретения. Хотя настоящее изобретение подробно описано здесь применительно к его преимущественным вариантам осуществления, следует понимать, что они описаны лишь в качестве иллюстрации и примеров настоящего изобретения, главным образом в целях предоставления полного и достаточного для осуществления изобретения описания. Соответственно полагается, что настоящее изобретение ограничено только смыслом и объемом прилагаемой формулы изобретения.
Предложена цифровая система радиосвязи, в которой обеспечивается уменьшение появляющихся в каналах нежелательных эффектов затухания сигнала, временной дисперсии и интерференции благодаря использованию подавления интерференции и комбинированию приема на разнесенные антенны. Система цифровых последовательностей, несущая цифровые сигналы, передается по радиоканалам, в которых сигналы могут искажаться затуханием, временной дисперсией и интерференцией. Искаженные сигналы принимаются приемником, имеющим одну или несколько антенн. Принятые сигналы обрабатываются с образованием потоков выборок принимаемого сигнала для каждой антенны. Комбинированием гипотетических последовательностей сигналов и моделей для каждого канала вырабатываются расчетные выборки принимаемых сигналов для каждой антенны. Обработкой выборок принимаемых сигналов и расчетных выборок принимаемых сигналов совместно с функцией корреляции ослабления получают метрику плеч, используемую в алгоритме. Витерби или в ином алгоритме определения последовательности. Процессор метрики плеч выбирает одну из нескольких конфигураций в зависимости от того, являются ли канал изменяемым во времени. Технический результат заключается в уменьшении затухания и интерференции сигнала. 4 с. и 21 з.п. ф-лы, 8 ил.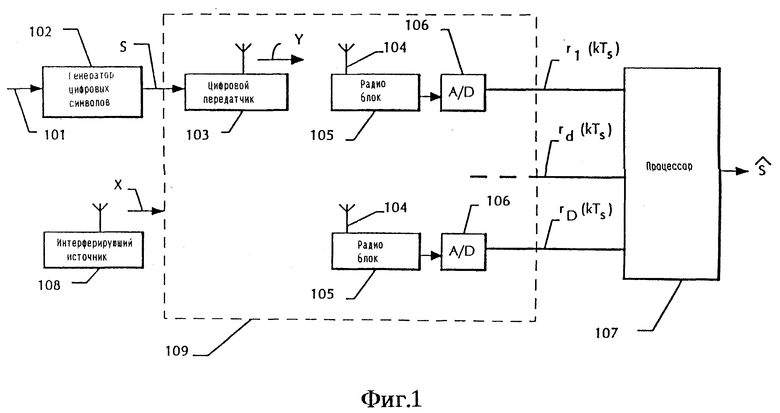
(а) генерирование и передачу сигнала, представляющего собой последовательность передаваемых символов, (b) прием упомянутого сигнала на антенну, (с) обработку упомянутого сигнала с получением выборок принимаемого сигнала для упомянутой антенны так, чтобы получить несколько выборок сигнала на период символа, (d) определение характеристик соединения канала для этой антенны для получения характеристик соединения канала, отличающийся тем, что способ дополнительно содержит следующие операции: (е) определение функций корреляции ослабления и выработку значений функции корреляции ослабления, (f) формирование метрики плеч в процессоре метрики плеч с использованием выборок принимаемого сигнала, характеристик соединения канала и функций корреляции ослабления и (g) использование метрики плеч в алгоритме определения последовательности для определения упомянутой последовательности передаваемых символов.
| US 5191598 A, 02.03.93 | |||
| US 5319677 A, 07.06.94 | |||
| EP 0425458 A, 02.05.91 | |||
| US 5297171 A, 22.03.94 | |||
| Устройство приема радиосигнала в многолучевых каналах связи | 1987 |
|
SU1480135A1 |
| SU 1821922 A, 15.06.93 | |||
| SU 1832389 A, 07.08.93. | |||
