;; 2
/
12 /J
ел
OS vl
4 vl
Фи,1
31516747
Изобретение относится к измерительп
ной технике и может быть использовано для контроля перемещения различных объектов, в частности к робототехнике и автоматизированных линиях.
Целью изобретения является расширение функциональных возможностей индуктивно-трансформаторного датчика
Индуктивно-трансформаторный датчи перемещений работает следующим образом.
В исходном положении поперечины 16-19 крестовины якоря 15 параллельн перемычкам 6-9 магнитопровода и пере крывают одинаковую площадь обмоток ll-l измерения, размещенных на стер
перемещений за счет получения информа- Q жнях 2-5 (фиг.2). Сопротивления маг15
5
Ю
ции также и по углу поворота благодаря конструкции якоря, обеспечивающей изменение проводимости магнитной цепи датчика как при линейных, так и при угловых перемещениях якоря, связанного с объектом контроля.
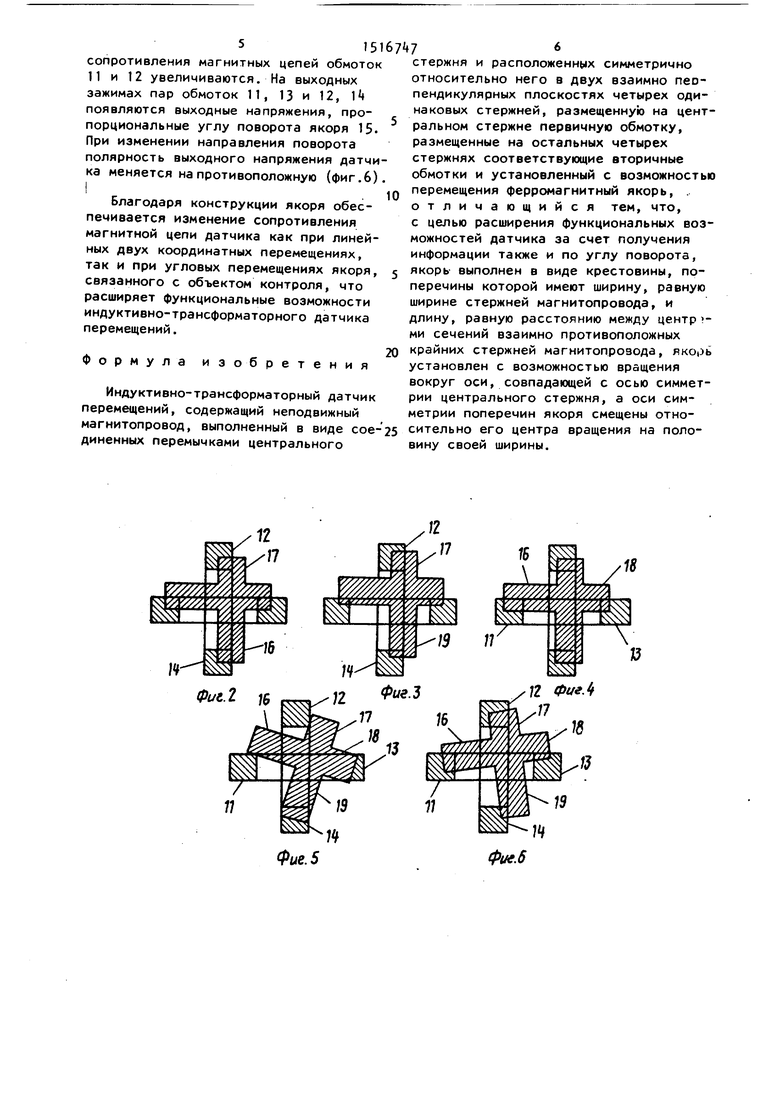
На фиг.1 показано схематично конструктивное выполнение индуктивно- трансформаторного датчика перемещений; на фиг.2- - работа датчика при изме- рении линейных перемещений; на фиг.5 6 - то же, при измерении угловых перемещений.
Индуктивно-трансформаторный датчик перемещений содержит неподвижный маг- нитопровод, выполненный в виде центрального стержня 1 и расположенных симметрично относительно него в двух взаимно перпендикулярных плоскостях четырех одинаковых стержней 2-3.Центральный стержень 1 и стержни 2-5 соединены перемычками 6-9. На центральном стержне 1 размещена первичная обмотка 10 возбуждения, а на остальных стержнях 2-5 - вторичные обмотки ll-l измерения, соединенные попарно-последовательно. Внутри каждой пары обмоток 11-13 и 12-1 они включены встречно. Напротив стержней 1-5 установлен якорь 15, выполненный в виде крестовины, поперечины 16-19 которой имеют сширину, равную ширине стержней магнитопровода, и длину, равную расстоянию между центрами сечений взаимно противоположных крайних стержней 2, 4 и 3, 5 магнитопровода. Якорь 15 установлен с возможностью линейных перемещений по двум координатам, а также с возможностью вращения вокруг оси, - совпадающей с осью симметрии центрального стержня 1, при этом оси симмет- 50 рии поперечин 16-19 якоря 15 смещены относительно его центра вращения на Половину своей ширины. Каждая пара обмоток 11-13 и 12-14 обеспечивает регистрацию смещения якоря 15 вдоль одного из взаимно перпендикулярных направлений или его поворота по или против часовой стрелки.
}5
40
55
нитных цепей для обмоток измерения в каждой паре 11-13 и 12-14 обмоток равны, вследствие чего магнитным потоком, создаваемым первичной обмотко 10 на всех обмотках измерения, наводятся одинаковые по величине ЭДС. Поэтому выходной сигнал датчика, сни маемый с каждой из пар обмоток измерения, равен нулю. При линейном пере мещении якоря 15, например, к стержню 3 площадь перекрытия поперечиной
17обмотки 12 измерения увеличивается, а площадь перекрытия поперечиной 19 обмотки 14 измерения уменьшается (фиг.З), вследствие чего сопротивление магнитной цепи обмотки 12 уменьт шается, а сопротивление магнитной це пи обмотки 14 увеличивается. На обмотках 12 и 14 одной пары наводятся различные по величине ЭДС, вследствие чего на выходе датчика появляется выходной сигнал, величина которого пропорциональна величине перемещения якоря 15 по одной линейной координат те, а знак указывает направление перемещения якоря 15 по этой координате.
Аналогичным образом датчик работает при измерении перемещения по другой линейной координате (фиг.4). При этом изменяются площадь перекрытия поперечиной 16 обмотки 11 измерения и площадь перекрытия поперечиной
18обмотки 13 измерения, вследствие чего на выходных зажимах пары обмоток 11, 13 появляется выходной сигнал датчика, величина которого пропорциональна перемещению якоря 15 по другой линейной координате, а знак определяет направление этого перемещения.При угловом перемещении якоря 15, например по часовой стрелке (фиг.5), вокруг оси симметрии центрального стержня увеличивается площадь перекрытия поперечиной 19 якоря обмотки 14 и увеличивается площадь перекрытия.поперечиной l8 якоря обмотки 13, вследствие чего сопротивления магнитных цепей обмоток 13 и 14 уменьшаются, а
Индуктивно-трансформаторный датчик перемещений работает следующим образом.
В исходном положении поперечины 16-19 крестовины якоря 15 параллельны перемычкам 6-9 магнитопровода и перекрывают одинаковую площадь обмоток ll-l измерения, размещенных на стерQ жнях 2-5 (фиг.2). Сопротивления маг5
5
Ю
50
}5
40
5
нитных цепей для обмоток измерения в каждой паре 11-13 и 12-14 обмоток равны, вследствие чего магнитным потоком, создаваемым первичной обмоткой 10 на всех обмотках измерения, наводятся одинаковые по величине ЭДС. Поэтому выходной сигнал датчика, снимаемый с каждой из пар обмоток измерения, равен нулю. При линейном перемещении якоря 15, например, к стержню 3 площадь перекрытия поперечиной
17обмотки 12 измерения увеличивается, а площадь перекрытия поперечиной 19 обмотки 14 измерения уменьшается (фиг.З), вследствие чего сопротивление магнитной цепи обмотки 12 уменьт шается, а сопротивление магнитной цепи обмотки 14 увеличивается. На обмотках 12 и 14 одной пары наводятся различные по величине ЭДС, вследствие чего на выходе датчика появляется выходной сигнал, величина которого пропорциональна величине перемещения якоря 15 по одной линейной координат, те, а знак указывает направление перемещения якоря 15 по этой координате.
Аналогичным образом датчик работает при измерении перемещения по другой линейной координате (фиг.4). При этом изменяются площадь перекрытия поперечиной 16 обмотки 11 измерения и площадь перекрытия поперечиной
18обмотки 13 измерения, вследствие чего на выходных зажимах пары обмоток 11, 13 появляется выходной сигнал датчика, величина которого пропорциональна перемещению якоря 15 по другой линейной координате, а знак определяет направление этого перемещения.При угловом перемещении якоря 15, например по часовой стрелке (фиг.5), вокруг оси симметрии центрального стержня увеличивается площадь перекрытия поперечиной 19 якоря обмотки 14 и увеличивается площадь перекрытия.поперечиной l8 якоря обмотки 13, вследствие чего сопротивления магнитных цепей обмоток 13 и 14 уменьшаются, а
сопротивления магнитных цепей обмоток 11 и 12 увеличиваются. На выходных зажимах пар обмоток 11, 13 и 12, И появляются выходные напряжения, пропорциональные углу поворота якоря 15. При изменении направления поворота полярность выходного напряжения датчика меняется на противоположную (фиг,6). I
Благодаря конструкции якоря обеспечивается изменение сопротивления магнитной цепи датчика как при линейных двух координатных перемещениях, так и при угловых перемещениях якоря, связанного с объектом контроля, что расширяет функциональные возможности индуктивно-трансформаторного датчика перемещений.
Формула из об р е т е н и я
Индуктивно-трансформаторный датчик перемещений, содержащий неподвижный магнитопровод, выполненный в виде сое- 25 диненных перемычками центрального
0
0
5
стержня и расположенных симметрично относительно него в двух взаимно перпендикулярных плоскостях четырех одинаковых стержней, размещенную на центральном стержне первичную обмотку, размещенные на остальных четырех стержнях соответствующие вторичные обмотки и установленный с возможностью перемещения ферромагнитный якорь, . отличающийся тем, что, с целью расширения функциональных возможностей датчика за счет получения информации также и по углу поворота, якорь выполнен в виде крестовины, поперечины которой имеют ширину, равную ширине стержней магнитопровода, и длину, равную расстоянию между центрами сечений взаимно противоположных крайних стержней магнитопрозода, якорь установлен с возможностью вращения вокруг оси, совпадающей с осью симметрии центрального стержня, а оси симметрии поперечин якоря смещены относительно его центра вращения на половину своей ширины.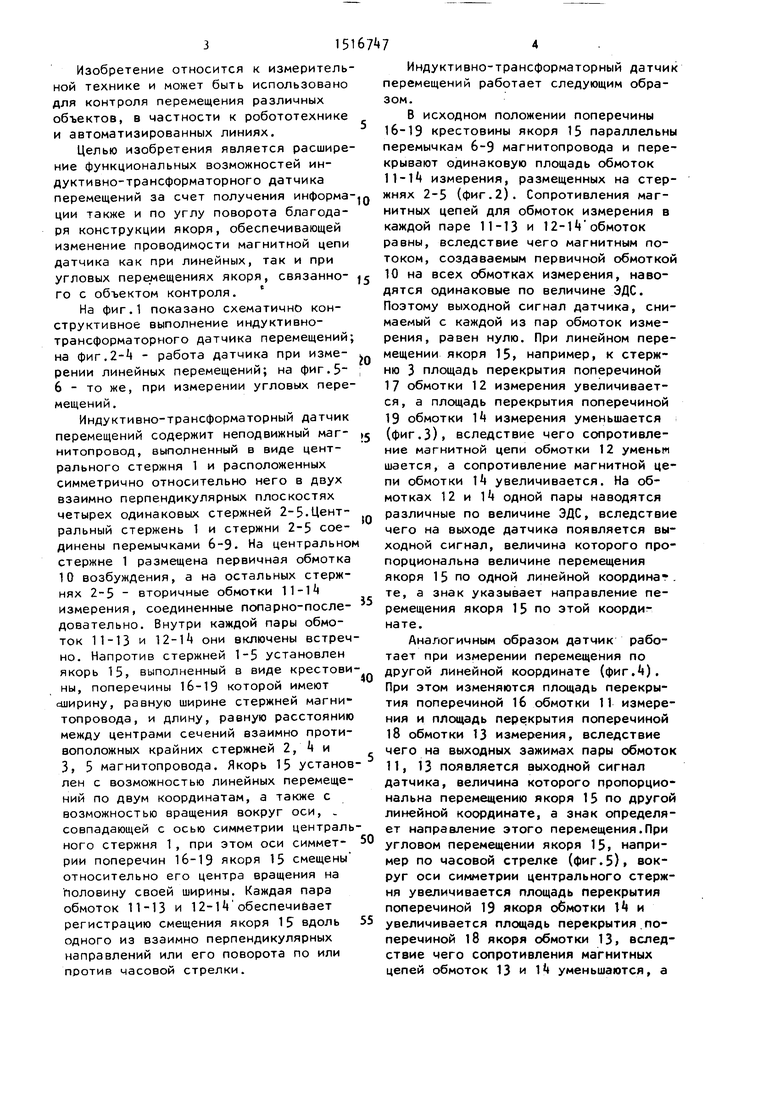
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик перемещений | 1986 |
|
SU1420344A1 |
| Устройство для измерения давления | 1985 |
|
SU1328698A1 |
| ИНДУКТИВНО-ТРАНСФОРМАТОРНЫЙ ДАТЧИК | 1997 |
|
RU2138011C1 |
| Трансформаторный преобразователь перемещений | 1985 |
|
SU1357693A1 |
| Дифференциально-трансформаторный датчик перемещений | 1985 |
|
SU1270549A1 |
| Трансформаторный двухкоординатный преобразователь линейных перемещений | 1988 |
|
SU1657943A1 |
| Преобразователь угловых перемещений | 1988 |
|
SU1516762A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ БОЛЬШИХ УГЛОВЫХ И МАЛЫХ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2062975C1 |
| АМПЛИТУДНО-ФАЗОВЫЙ ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ С ФАЗОВЫМ ВЫХОДОМ | 2001 |
|
RU2208762C1 |
| Преобразователь для измерения линейных и угловых перемещений | 1989 |
|
SU1679176A1 |
Изобретение относится к измерительной технике и имеет целью расширение функциональных возможностей индуктивно-трансформаторного датчика перемещений, который содержит неподвижный магнитопровод, выполненный в виде соединенных перемычками центрального стержня 1 и расположенных симметрично относительно него в двух взаимно перпендикулярных плоскостях остальных одинаковых стержней 2-5. На центральном стержне 1 размещена обмотка 10 возбуждения, а на крайних стержнях 2-5 размещены вторичные обмотки 11-14 измерения, соединенные попарно-последовательно. Внутри каждой пары 11-13 и 12-14 обмотки включены встречно. При линейном или угловом перемещении якоря 15, выполненного в виде крестовины, изменяются площади перекрытия его поперечинами 16-19 обмоток в парах 11-13 и 12-14, вследствие чего изменяются сопротивления магнитных цепей этих обмоток. Благодаря этому напряжения на выходе пар обмоток 11-13 и 12-14, являющиеся выходным сигналом датчика, пропорциональны величине перемещения якоря 15, связанного с объектом контроля, а полярность выходного сигнала датчика определяет направление этого перемещения. 6 ил.
| Индуктивно-трансформаторный датчик контроля перемещений | 1975 |
|
SU665202A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
