Изобретение относится к геодезическому приборостроению и может быть использовано для определения и исправления угла i у нивелиров всех типов.
Известно несколько способов определения и исправления угла i.
При первом способе определения угла i два нивелира устанавливают на столбе, штативах или достаточно устойчивом столе и наводят друг на друга. Наведение обеих труб осуществляют вращением вокруг вертикальных осей с последующим приведением уровней в нуль-орган. После установки элевационными винтами уровней на контакт в поле зрения одного из нивелиров можно наблюдать несовпадение горизонтальных нитей наблюдаемой и собственной сетки нитей. Это является признаком непараллельности визирных осей нивелиров.
Для измерения значения угла i элевационным винтом зрительную трубу любого нивелира разворачивают вверх или вниз до совмещения горизонтальных нитей сеток. При этом нарушается "контакт" в изображении концов пузырька уровня: они смещаются относительно друг друга. Половина расстояния между концами пузырька в делениях шкалы уровня есть значение угла i. Зная цену деления уровня, можно выразить это значение в секундах.
Если повторить описанные выше операции с третьим нивелиром, используя в паре с ним первый, а затем второй нивелир, то получим аналогичные результаты.
Недостатком этого способа является то, что он только определяет значение угла i, но не исправляет его.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ исправления угла i одновременно у двух нивелиров. Для этого на объективе каждого нивелира крепят шкалу, элевационным винтом одного нивелира устанавливают отсчет по шкале другого равный своему, нивелиры меняют местами, берут отсчеты по шкалам, вычисляют среднее из отсчетов по своей шкале, элевационным винтом каждого нивелира устанавливают средний отсчет по каждой шкале и вертикальными исправительными винтами совмещают изображения концов цилиндрического уровня.
Недостатком данного способа является возможное изменение величины разности горизонтов двух нивелиров после их перестановки местами и приведения в рабочее положение, что снижает точность определения и исправления угла i.
Задачей изобретения является повышение точности определения и исправления угла i за счет постоянства величины разности горизонтов нивелиров и повышение экономической эффективности за счет одновременной поверки трех нивелиров вместо двух.
Указанный технический результат достигается тем, что в способе исправления угла i у нивелиров, заключающемся в том, что на объективе каждого нивелира крепят шкалу, берут отсчеты по шкалам и вертикальными исправительными винтами совмещают изображения концов пузырька цилиндрического уровня, поверяют одновременно три нивелира, расположенных в виде равностороннего треугольника, при этом отсчеты по шкалам других нивелиров берут после совмещения элевационным винтом концов пузырька цилиндрического уровня, затем каждым нивелиром по шкалам других определяют величину разности их горизонтов, нивелир наводят на шкалу другого и элевационным винтом устанавливают отсчет, равный величине разности горизонтов этой пары нивелиров.
Предложенный способ реализуется следующим образом. На объективы нивелиров надеваются насадки со шкалами с оцифровкой вверх и вниз. За начало отсчета принимается центр объектива /визирная ось зрительной трубы/. Деления шкал нанесены на одной стороне, двумя столбцами со смещением относительно друг друга - как у инварной рейки.
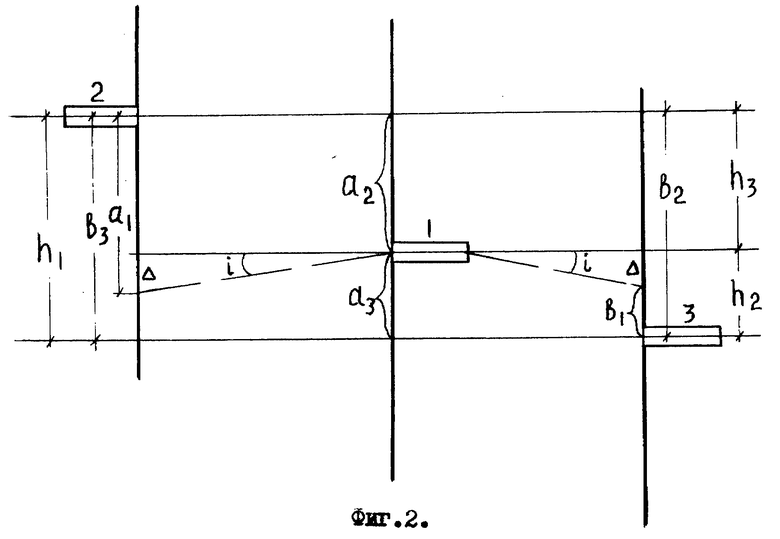
Нивелиры устанавливаются на штативах в виде равностороннего треугольника со сторонами 50 м /фиг. 1/, так, чтобы наибольшая разность горизонтов нивелиров была примерно 150 мм /длина применяемых шкал/ и приводят нивелиры в рабочее положение /фиг. 2/. Наводят зрительную трубу одного нивелира на шкалы других /например, первый нивелир на шкалы второго и третьего/, элевационным винтом совмещают изображения концов цилиндрического уровня и берут отсчеты по шкалам /например, a1 по шкале второго и b1 по шкале третьего/. Вычисляют величину разности горизонтов, пары нивелиров /например, h1 = a1 + b1/. Аналогичные действия выполняют с каждым нивелиром и получают разности горизонтов для трех пар нивелиров: h2 = b2 - a2; h3 = b3 - a3. Так как расстояния от первого нивелира до второго и третьего равны /от второго до первого и третьего, от третьего до второго и первого/, то получают истинное значение разности горизонтов приборов. Поэтому, на фиг. 2 угол i показан только у первого нивелира.
Затем наводят трубу нивелира на шкалу одного из противоположных /например, третий нивелир на шкалу второго/. Элевационным винтом устанавливают отсчет h1, равный разности горизонтов для данной пары нивелиров. Вертикальными исправительными винтами совмещают изображения концов цилиндрического уровня. Для контроля трубу этого /третьего/ нивелира наводят на шкалу первого, на отсчет h2. Аналогично исправление угла i выполняют у каждого нивелира.
Величину угла i вычисляют по формуле
где Δ - разность между отсчетом по шкале и разностью горизонтов для данной пары нивелиров;
L - расстояние между нивелирами данной пары, мм;
p'' = 206265''.
Для первого нивелира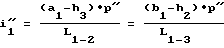
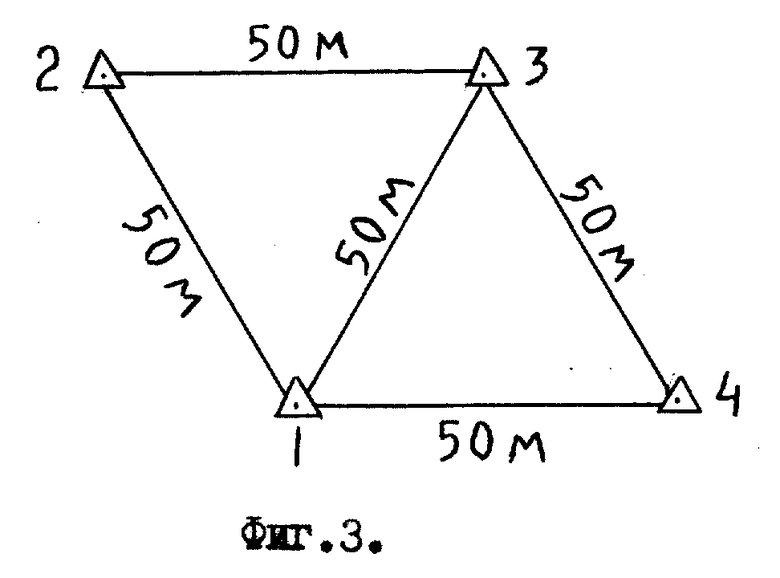
В случае поверки одновременно четырех нивелиров их располагают в виде ромба со сторонами 50 м /фиг. 2/. Тогда второй и четвертый повторяют по двум нивелирам /первому и третьему/, а приборы первый и третий по трем /второму, третьему, четвертому, и первому, второму, четвертому соответственно/.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ И ИСПРАВЛЕНИЯ УГЛА i У НИВЕЛИРА | 1993 |
|
RU2078308C1 |
| НИВЕЛИР С САМОУСТАНАВЛИВАЮЩЕЙСЯ ЛИНИЕЙ ВИЗИРОВАНИЯ | 1994 |
|
RU2087862C1 |
| МАРКА К ВИЗИРНОМУ УСТРОЙСТВУ | 2000 |
|
RU2175112C1 |
| ЦЕНТРИРУЮЩИЙ ШТАТИВ | 2001 |
|
RU2184935C1 |
| ТЕОДОЛИТ ДЛЯ ЗАДАНИЯ НАКЛОННЫХ ПЛОСКОСТЕЙ | 2001 |
|
RU2187786C1 |
| ЦЕНТРИРУЮЩИЙ ШТАТИВ | 1995 |
|
RU2087792C1 |
| ПРИБОР ДЛЯ ЗАДАНИЯ ЛАЗЕРНОЙ ОПОРНОЙ ПЛОСКОСТИ | 2000 |
|
RU2178546C1 |
| УСТРОЙСТВО ДЛЯ УСИЛЕНИЯ ОПОРНОГО УЗЛА БАЛОЧНОЙ КОНСТРУКЦИИ | 1996 |
|
RU2140511C1 |
| РАДИАЛЬНЫЙ ПЛАНИМЕТР | 1999 |
|
RU2171448C2 |
| АРМАТУРНОЕ ИЗДЕЛИЕ | 1996 |
|
RU2119023C1 |
Для исправления угла i у нивелиров на объективе каждого нивелира крепят шкалу. Берут отсчеты по шкалам и вертикальными измерительными винтами совмещают изображения концов пузырька цилиндрического уровня. Поверяют одновременно три нивелира, расположенных в виде равностороннего треугольника. По отсчетам по шкалам противоположных нивелиров вычисляют величину разности горизонтов для трех пар нивелиров. До совмещения изображений концов пузырька цилиндрического уровня исправительными винтами каждый нивелир наводят на шкалу другого и элевационным винтом устанавливают отсчет, равный величине разности горизонтов этой пары нивелиров. Повышены точность, экономическая эффективность. 3 ил.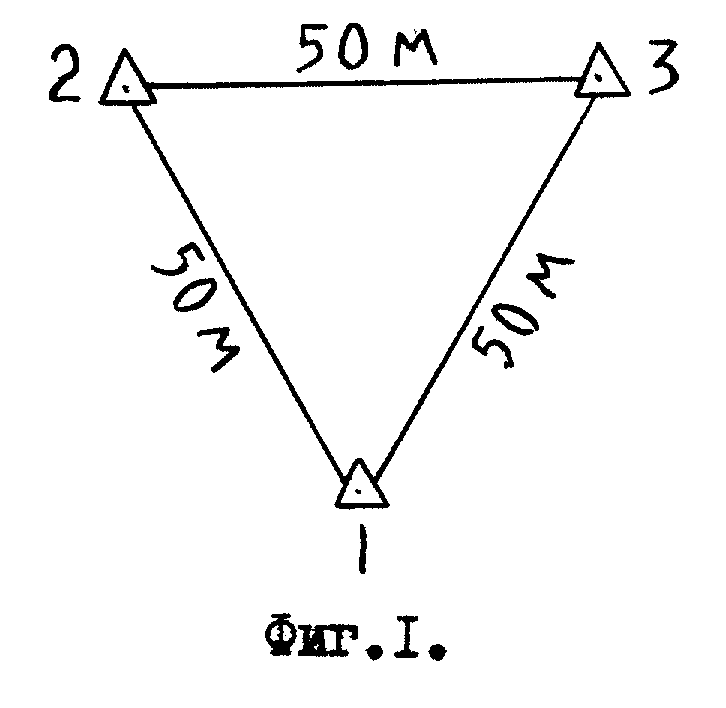
Способ исправления угла i у нивелиров, заключающийся в том, что на объективе каждого нивелира крепят шкалу, берут отсчеты по шкалам и вертикальными измерительными винтами совмещают изображения концов пузырька цилиндрического уровня, отличающийся тем, что поверяют одновременно три нивелира, расположенных в виде равностороннего треугольника, при этом по отсчетам по шкалам противоположных нивелиров вычисляют величину разности горизонтов для трех пар нивелиров, до совмещения изображений концов пузырька цилиндрического уровня исправительными винтами каждый нивелир наводят на шкалу другого и элевационным винтом устанавливают отсчет, равный величине разности горизонтов этой пары нивелиров.
| RU 93034402 A, 10.01.96 | |||
| Мещанский Ф.Л | |||
| Коллимационный способ определения угла i группы нивелиров | |||
| Геодезия и картография | |||
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
| Способ поверки горизонтальности визирной оси нивелира | 1977 |
|
SU669188A1 |
