Область применения изобретения
Данное изобретение относится к системам связи, в частности к способу присвоения элементов демодуляции для системы связи, способной принимать несколько сигналов.
II. Описание соответствующей техники
В сотовой телефонной системе на базе многостанционного доступа с кодовым разделением каналов (МДКР) для связи со всеми базовыми станциями в системе применяется общий диапазон частот. Этот общий диапазон частот позволяет осуществлять одновременную связь между подвижной станцией и более чем одной базовой станцией. Сигналы, занимающие общий диапазон частот, различаются на приемной станции по свойствам формы волны на базе МДКР с расширенным спектром на основе использования высокоскоростного псевдослучайного (PN) кода. Высокоскоростной PN код используется для модулирования сигналов, передаваемых с базовых станций и подвижных станций. Передающие станции, использующие различные PN коды или PN коды, смещенные во времени, генерируют сигналы, которые могут быть приняты раздельно на приемной станции. Высокоскоростная псевдошумовая модуляция также позволяет приемной станции принимать сигнал от одной передающей станции, где сигнал прошел через несколько разных лучей распространения. Сигнал, прошедший через несколько разных лучей распространения, генерируется характеристиками многолучевого распространения сотового канала. Одной из характеристик канала с многолучевым распространением является расширение во времени, вводимое в передаваемый по каналу сигнал. Например, если по каналу с многолучевым распространением передается идеальный импульс, принятый сигнал имеет вид потока импульсов. Другой характеристикой канала с многолучевым распространением является то, что каждый луч через канал может вызывать разный коэффициент затухания. Например, если по каналу с многолучевым распространением передается идеальный импульс, каждый импульс принятого потока импульсов, как правило, имеет силу сигнала, отличную от силы других принятых импульсов. Еще одна характеристика канала с многолучевым распространением состоит в том, что каждый луч через канал может вызывать разную фазу сигнала. Например, если по каналу с многолучевым распространением передается идеальный импульс, каждый импульс принятого потока импульсов, как правило, имеет фазу, отличную от фазы других принятых импульсов.
В радиоканале подвижной связи многолучевость создается отражением сигнала от препятствий в окружающей среде, таких, как здания, деревья, автомобили и люди. Как правило, радиоканал подвижной связи представляет собой канал с многолучевым распространением, изменяющимся во времени за счет относительного движения структур, создающих многолучевость. Например, если по каналу с изменяющимся во времени многолучевым распространением передается идеальный импульс, принятый поток импульсов со временем изменит местоположение, затухание и фазу как функцию времени, в течение которого передавался идеальный импульс.
Характеристика многолучевости канала может привести к появлению замирания сигнала. Замирание является следствием характеристик фазирования канала с многолучевым распространением. Замирание имеет место, когда векторы многолучевости складываются разрушительным образом, выдавая принятый сигнал, который меньше любого из отдельно взятых векторов. Например, если через канал с многолучевым распространением, имеющим два луча, когда первый луч имеет коэффициент затухания X дБ, временную задержку δ c фазовым сдвигом ⊖ радиан, а второй луч имеет коэффициент затухания X дБ, временную задержку δ с фазовым сдвигом ⊖ + π радиан, передается синусоидальная волна, то на выходе канала сигнал принят не будет.
В системах с узкополосной модуляцией, таких, как аналоговая ЧМ модуляция, применяемая в традиционных радиотелефонных системах, наличие многолучевости в радиоканале приводит к резкому замиранию многолучевости. Однако, как отмечалось выше, в случае широкополосного МДКР разные лучи могут различаться в процессе демодуляции. Такое различение не только в огромной мере сокращает степень замирания многолучевости, но и обеспечивает преимущество системе с МДКР.
Отрицательное воздействие замирания может быть смягчено за счет управления мощностью передатчика в системе с МДКР. В патенте США N 50561099, озаглавленном "Способ и устройство для управления мощностью передачи в системе сотовой подвижной телефонной связи с МДКР", выпущенном 8 октября 1991 г., того же патентообладателя, что и для данного изобретения, представлена система для управления мощностью базовой станции и подвижной станции. Кроме того, воздействие замирания при многолучевом распространения может быть уменьшено при связи с несколькими базовыми станциями путем использования процесса мягкой передачи обслуживания. Процесс передачи обслуживания представлен в патенте США N 5101501, озаглавленном "Мягкая передача обслуживания в сотовой телефонной системе с МДКР", выпущенном 8 октября 1991 г., того же патентообладателя, что и для данного изобретения.
В сотовой телефонной системе исключительно важно обеспечить максимальную пропускную способность системы с точки зрения количества одновременных телефонных вызовов, которые могут быть обработаны. Пропускная способность системы в системе с расширенным спектром может быть доведена до максимума, если мощность передатчика каждой подвижной станции регулируется таким образом, что каждый передаваемый сигнал поступает на приемник базовой станции на одинаковом уровне. В реальной системе каждая подвижная станция может передавать минимальный уровень сигнала, выдающий такое отношение сигнал-шум, которое обеспечивает приемлемое восстановление данных. Если сигнал, переданный подвижной станцией, поступает на приемник базовой станции на чрезмерно низком уровне мощности, то коэффициент ошибок по битам может оказаться чрезмерно высоким, чтобы можно было обеспечить высококачественную связь, из-за помех от остальных подвижных станций. С другой стороны, если переданный подвижной станцией сигнал характеризуется чрезмерно высоким уровнем мощности при приеме на базовой станции, связь с этой конкретной подвижной станцией приемлема, но данный сигнал большой мощности действует как помеха по отношению к другим подвижным станциям. Эти помехи могут оказывать отрицательное воздействие на связь с другими подвижными станциями.
Следовательно, для достижения максимальной пропускной способности, во взятой в качестве примера системе с расширенным спектром на базе МДКР мощность передачи каждой подвижной станции в пределах зоны обслуживания базовой станция управляется базовой станцией для обеспечения такой же номинальной мощности принятого сигнала на базовой станции. В идеальном случае суммарная мощность сигнала, принятая на базовой станции, равна номинальной мощности, принятой от каждой подвижной станции, умноженной на число подвижных станций, осуществляющих передачу в пределах зоны обслуживания базовой станции, плюс мощности, принятой на базовой станции от подвижных станций в зоне обслуживания соседних базовых станций.
Лучевые потери в радиоканале могут характеризоваться двумя отдельными явлениями: средними лучевыми потерями и замиранием. Прямая линия от базовой станции к подвижной станции работает на иной частоте, чем обратная линия от подвижной станции к базовой станции. Однако поскольку частоты прямой и обратной линий находятся в одном и том же диапазоне и том же диапазоне частот, существует значительная корреляция между средними лучевыми потерями обеих линий. С другой стороны, замирание является независимым явлением для прямой и обратной линий и изменяется как функция времени.
Во взятой в качестве примера системе с МДКР каждая подвижная станция оценивает лучевые потери прямой линии на основе суммарной мощности на входе подвижной станции. Суммарная мощность представляет собой сумму мощности от всех базовых станций, работающих на одной и той же присвоенной частоте, как это воспринимается подвижной станцией. Исходя из оценки лучевых потерь прямой линии, усредненных по времени, подвижная станция устанавливает уровень передачи сигнала обратной линии. Если канал обратной линии для одной подвижной станции внезапно улучшается по сравнению с каналом прямой линии для одной и той же подвижной станции за счет независимого замирания обоих каналов, то сигнал, в том виде, как он принят на базовой станции от данной подвижной станции, возрастает по мощности. Указанное увеличение мощности вызывает появление дополнительных помех для всех сигналов, совместно использующих одну и ту же присвоенную частоту. Таким образом, быстрый отклик мощности передачи подвижной станции на внезапное улучшение в канале канала улучшило бы рабочие показатели системы.
Мощность передачи подвижной станции также управляется одной или несколькими базовыми станциями. Каждая базовая станция, с которой подвижный объект осуществляет связь, измеряет силу принятого от подвижного объекта сигнала. Измеренное значение силы сигнала сравнивается с требуемым уровнем силы сигнала для данной конкретной подвижной станции, каждой базовой станцией генерируется и передается подвижному объекту по прямой линии команда регулировки мощности. В ответ на команду регулировки мощности базовой станции подвижный объект увеличивает или сокращает мощность передачи подвижного объекта на заранее установленную величину. Таким способом осуществляется быстрое реагирование на изменение в канале и улучшаются средние рабочие показатели системы.
Когда подвижная станция осуществляет связь с более чем одной базовой станцией, от каждой базовой станции поступают команды регулировки мощности, подвижная станция предпринимает действия на основании указанных команд регулировки мощности от нескольких базовых станций с целью избежать появления уровней мощности передачи, которые могут оказать отрицательное мешающее влияние на связь с другими подвижными станциями, и все же обеспечить достаточную мощность для поддержания связи от подвижной станции, по крайней мере, к одной из базовых станций. Этот механизм управления мощностью реализуется за счет того, что подвижная станция повышает уровень передаваемого ею сигнала лишь в том случае, если каждая базовая станция, с которой подвижная станция осуществляет связь, запрашивает увеличение уровня мощности. Подвижная станция снижает уровень передаваемого ею сигнала, если любая базовая станция, с которой подвижная станция осуществляет связь, запрашивает уменьшение мощности.
Наличие многолучевости может обеспечить разнесение лучей к широкополосной системе с расширенным спектром. Система с расширенным спектром генерирует информационный сигнал расширения, модулируя информационный сигнал псевдослучайным (PN) кодом. Как правило, PN код использует частоту, в несколько раз превышающую скорость передачи информационного сигнала. Частота, с которой генерируется PN код, называется частотой следования элементарных посылок сигнала, а длительность одного бита данных PN кода называется временем элемента сигнала. Если имеется два или больше лучей с дифференциальной лучевой задержкой больше времени следования элементарных посылок сигнала, то для отдельного демодулирования этих сигналов могут использоваться два или больше обрабатывающих элементов, носящих название элементов демодуляции. Эти сигналы обычно характеризуются независимостью в замирании при многолучевом распространении, то есть они обычно не замирают вместе. Следовательно, выход двух и большего числа элементов демодуляции может объединяться для получения разнесения лучей. Потеря сигнала происходит лишь в случае, если сигналы из всех элементов демодуляции испытывают замирание одновременно, в идеальной системе как базовая, так и подвижная станция используют несколько элементов демодуляции.
По мере движения подвижной станции через физическую среду количество лучей сигналов и сила сигналов на этих лучах постоянно изменяется, как с точки зрения приема на подвижной станции, так и с точки зрения приема на базовой станции. Поэтому в приемнике, в котором применено данное изобретение, используется специальный обрабатывающий элемент, называемый поисковым элементом, который непрерывно сканирует канал во временной области для определения наличия, временного сдвига и силы сигналов в среде многолучевого распространения. Выход поискового элемента обеспечивает информацию для обеспечения того, чтобы элементы демодуляции отслеживали наиболее выгодные лучи. Данное изобретение обеспечивает способ присвоения нескольких элементов демодуляции нескольким принятым сигналам на основе информации поискового элемента.
Во взятой в качестве примера сотовой телефонной системе с МДКР каждая базовая станция передает опорный пилота-сигнал с расширенным спектром, данный пилот-сигнал используется подвижными станциями для получения исходной синхронизации системы и обеспечения мощного отслеживания времени и фазы передаваемых сигналов базовых станций. Пилот-сигнал, передаваемый каждой базовой станцией в системе, может использовать один и тот же PN код, но с разным смещением кода по фазе, что означает, что PN коды, передаваемые соседними базовыми станциями, идентичны, но сдвинуты во времени по отношению друг к другу. Фазовый сдвиг позволяет различать пилот-сигналы друг от друга в соответствии с базовой станцией, с которой они поступают. Поисковый элемент подвижной станции продолжает сканировать принятый сигнал на сдвигах кода, соответствующих передаваемым соседней базовой станцией пилот-сигналам в процессе работы в неактивном режиме вызова. Когда инициируется вызов, для использования в процессе данного вызова определяется адрес PN кода. Адрес кода может либо присваиваться базовой станцией, либо определяться заранее установленной процедурой на основе идентификации подвижной станции. После инициирования вызова поисковый элемент подвижной станции продолжает сканировать пилот-сигнал, передаваемый соседними базовыми станциями. Когда пилот-сигнал, передаваемый соседней базовой станцией, становится достаточно сильным для установления связи, подвижная станция генерирует и передает управляющее сообщение в базовую станцию, которая в данный момент обслуживает вызов. Текущая базовая станция обеспечивает управляющее сообщение контроллеру сотовой системы.
Контроллер сотовой системы начинает осуществление разнесения базовых станций или процесс так называемой "мягкой передачи обслуживания". Контроллер сотовой системы начинает присваивать модем, расположенный в новой базовой станции, вызову. Данному модему присваивается PN адрес, связанный с вызовом между подвижной станцией и модемом текущей базовой станции. Модем новой базовой станции, присвоенный для обслуживания вызова, ищет и находит передаваемый подвижной станцией сигнал. Модем новой базовой станции также начинает передавать подвижной станции сигнал прямой линии. Поисковый элемент подвижной станции ищет данный сигнал прямой линии в соответствии с сигнальной информацией, предоставленной старой базовой станцией. Когда подвижная станция получает переданный модемом новой подвижной станции сигнал, подвижная станция может продолжать осуществление связи через две базовые станции. Аналогично вышеописанной первой новой базовой станции могла бы быть добавлена и другая базовая станция. В этом случае подвижная станция может продолжать осуществлять связь через три базовых станции. Данный процесс может продолжаться до тех пор, пока подвижная станция поддерживает связь с одной базовой станцией для каждого элемента демодуляции, который содержит подвижная станция, и свыше того.
Объединение разнесения на подвижной станции существенно повышает качество и надежность связи в сотовой телефонной системе. Для увеличения выигрыша, в котором отношение сигнал-шум определяется для каждого луча, может использоваться форма объединения максимальных отношений. Затем каждый луч может объединяться с вкладами от других лучей, взвешенных в соответствии с отношением сигнал-шум. Объединение может быть когерентным, поскольку демодуляция пилот-сигнала позволяет определить фазу каждого луча.
В луче от подвижной станции к базовой станции аналогичным образом получают прием разнесения лучей. Базовая станция может содержать аналогичный набор обрабатывающих элементов, как и подвижная станция, поскольку поисковый элемент может обеспечивать данные для присвоения множества элементов демодуляции. Данное изобретение определяет способ присвоения элементов демодуляции сигналам с многолучевым распространением на базовой станции.
В ходе связи с конечным пользователем демодулированные сигналы данных базовой станции передаются дальше контроллеру сотовой системы наряду с указанием качества сигнала. Контроллер сотовой системы передает эти сигналы конечному пользователю. Когда подвижная станция находится в режиме разнесения базовой станции с двумя независимыми базовыми станциями, демодулированные сигналы данных обеих базовых станций передаются дальше контроллеру сотовой системы наряду с указанием качества сигнала. Затем контроллер сотовой системы объединяет обе версии сигнала подвижной станции или выбирает сигнал с указанием наилучшего качества. При другой конфигурации системы контроллеру сотовой системы могут передаваться некодированные или даже недемодулированные сигналы, чтобы обеспечить возможность использования улучшенного процесса объединения разнесения.
В состав типовой конфигурации базовой станции могут входить несколько секторов. В состав многосекторной базовой станции входят несколько независимых приемопередающих антенн. Когда подвижная станция находится в режиме разнесения базовой станции и осуществляет связь с двумя секторами одной и той же базовой станции, имеются демодулированные сигналы данных обоих секторов для объединения в пределах базовой станции до того, как эти сигналы передаются контроллеру сотовой системы. Действительно, в пределах многосекторной базовой станции система может быть сконфигурирована таким образом, что каждый элемент демодуляции может быть присвоен любому поступающему сигналу независимо от сектора, из которого сигнал был принят. Данная конфигурация системы позволяет осуществлять процесс, называемый более мягкой передачей обслуживания, и данное изобретение определяет способ присвоения элементов демодуляции для данной конфигурации.
Таким образом, предметом данного изобретения является обеспечение способа присвоения нескольких элементов демодуляции на подвижной станции.
Другим предметом данного изобретения является обеспечение способа присвоения нескольких элементов демодуляции на базовой станции.
Резюме изобретения
Данное изобретение определяет способ присвоения нескольких элементов демодуляции в системе с расширенным спектром. В данном изобретении в пределах подвижной станции поисковый элемент осуществляет наблюдение, в ходе которого он сканирует окно временных смещений вокруг номинального времени поступления каждого сигнала каждой базовой станции, с которой установлена активная связь. В результате каждого наблюдения получают перечень лучей наблюдения, в который входят показатели силы пилот-сигнала, временных смещений и смещения пилот-сигнала соответствующей базовой станции. Поисковый элемент передает данную информацию контроллеру. Контроллер пытается согласовать временное смещение каждого луча наблюдения со временным смещением лучей, демодулируемых в текущий момент элементами демодуляции. Если имеется несколько лучей демодуляции, которые соответствуют одному лучу наблюдения, все элементы демодуляции, присвоенные этому лучу, за исключением элемента демодуляции, имеющего указание наибольшей силы сигнала, обозначаются как "свободные". Если существует луч демодуляции, который не соответствует лучу наблюдения, то к перечню лучей наблюдения добавляются вводимые данные о луче наблюдения, основанная на информации о лучах демодуляции.
Затем контроллер рассматривает лучи наблюдения в порядке силы сигнала, причем первым является луч наблюдения наиболее сильного сигнала. В случае отсутствия элемента демодуляции, присвоенного какому-либо лучу в соответствующем секторе рассматриваемого луча наблюдения, то контроллер пытается присвоить элемент демодуляции лучу наблюдения в следующем порядке. Если имеется неприсвоенный или помеченный как "свободный" элемент демодуляции, то этот элемент демодуляции присваивается лучу наблюдения. В случае отсутствия свободного элемента демодуляции, элемент демодуляции, имеющий наиболее слабый луч, который не является единственным лучом демодуляции из своего сектора базовой станции, если таковой вообще имеется, повторно присваивается лучу наблюдения, наконец, если в первых двух случаях не происходит присвоения элемента демодуляции лучу наблюдения, то элемент демодуляции, присвоенный наиболее слабому лучу, повторно присваивается лучу наблюдения, если сила сигнала луча наблюдения больше силы сигнала наиболее слабого луча демодуляции. Данный процесс продолжается до тех пор, пока не произойдет одно повторное присвоение или пока последний критерий не потерпит неудачную попытку повторно присвоить элемент демодуляции рассматриваемому лучу наблюдения.
Если ни одно из вышеуказанных правил не присвоит повторно элемент демодуляции для настоящего наблюдения, то контроллер вновь рассматривает лучи наблюдения в порядке силы сигнала, причем первым является луч наблюдения наиболее сильного сигнала. Если луч наблюдения в данный момент не присвоен элементу демодуляции, контроллер может присвоить любой неприсвоенный или помеченный "свободный" элемент демодуляции рассматриваемому лучу наблюдения. В случае отсутствия неприсвоенный или помеченных "свободный" элементов демодуляции контроллер может также повторно присвоить элемент демодуляции, который присвоен тому же сектору базовой станции, что и луч наблюдения, если этот луч наблюдения сильнее луча демодуляции. Контроллер может также повторно присвоить наиболее слабый элемент демодуляции, присвоенный любому сектору базовой станции, имеющему два или более присвоенных элементов демодуляции, если луч наблюдения сильнее луча демодуляции. После того, как любое из двух вышеуказанных правил вызовет повторное присвоение или оба вышеуказанных правила для повторного присвоения не сработают для рассматриваемого луча наблюдения, процесс начинается снова.
Данное изобретение использует эти шаги для обеспечения разнесения базовых станций и секторов. Каждый раз при повторном присвоении элемента демодуляции истекает конечный промежуток времени, в течение которого данные не демодулируются. Следовательно, данное изобретение ограничивает количество повторных присвоений элементов демодуляции в расчете на одно наблюдение. Для создания гистерезиса в присвоениях и, таким образом, сокращения чрезмерного повторного присвоения элементов демодуляции используются сравнительные коэффициенты.
Базовая станция использует аналогичный, но менее сложный способ присвоения элементов демодуляции. Поскольку каждый сектор базовой станции принимает одну и ту же информацию из одной подвижной станции, нет необходимости жертвовать лучами максимальных уровней сигналов, чтобы содействовать разнесению. Таким образом, способ базовой станции основан более строго на уровне сигнала при одновременном ограничении количества повторных присвоений в расчете на одно наблюдение аналогично способу подвижной станции. Базовая станция также использует коэффициенты аналогично подвижной станции, для создания гистерезиса с целью сократить чрезмерное повторное присвоение элементов демодуляции.
Краткое описание чертежей
Характеристики, объекты и преимущества данного изобретения станут более очевидными из приводимого ниже подробного описания, если их рассматривать в сочетании с чертежами, на которых сходные ссылочные знаки соответствуют повсюду и где:
фиг.1 представляет собой иллюстрацию взятой в качестве примера подвижной станции, включающей несколько независимых элементов демодуляции;
фиг. 2 представляет собой подробную блок-схему элемента демодуляции взятой в качестве примера подвижной станции фиг.1;
фиг. 3A - 3C иллюстрируют зависимость силы пилот-сигнала от временя для трех различных базовых станций или секторов базовых станций;
фиг. 4 является кратким представлением способа присвоения элементов демодуляции для подвижной станции в соответствии с данным изобретением;
фиг. 5A - 5D являются подробным примером способа присвоения элементов демодуляции для подвижной станции в соответствии с данным изобретением;
фиг. 6 является иллюстрацией взятой в качестве примера базовой станции, включающей несколько независимых элементов демодуляции;
фиг. 7 является подробной блок-схемой элемента демодуляции взятой в качестве примера базовой станции фиг.6;
фиг. 8 является кратким представлением способа присвоения элементов демодуляции для базовой станции в соответствии с данным изобретением;
фиг. 9A - 9D являются подробным примером способа присвоения элементов демодуляции для базовой станции в соответствии с данным изобретением; и
фиг. 10A и 10B иллюстрируют зависимость силы сигнала одной подвижной станции от времени для двух разных секторов базовой станции.
Подробное описание предпочтительных выполнений
Данное изобретение определяет способ присвоения нескольких элементов демодуляции в системе с расширенным спектром. Здесь разработаны два способа: один, ориентированный на работу базовой станции, а второй - ориентированный на работу подвижной станции. Оба алгоритма разработаны путем представления конкретных реализаций, иллюстрирующих общие принципы данного изобретения.
Способ, используемый подвижной станцией, предполагает, что в состав подвижной станции входит ряд независимых элементов демодуляции, фиг. 1 иллюстрирует взятое в качестве примера выполнение такой подвижной станции. Элементы управляются контроллером 200 через межсоединение 212. Входной сигнал 210 поставляет сигнал, принимаемый подвижной станцией, который был обработан РЧ /аналоговым способом, поисковому элементу 202 и элементам демодуляции 204A - 204N. Поисковый элемент 202 непрерывно сканирует временную область в поисках пилот-сигналов от соседних базовых станций. Поисковый элемент 202 также сканирует набор временных сдвигов вокруг номинального времени поступления сигнала из каждой базовой станции в поисках сигналов с многолучевым распространением, которые были сформированы.
Поисковый элемент 202 передает разработанные данные контроллеру 200. Поисковый элемент 202 может передавать данные через межсоединение 212. В качестве альтернативы поисковый элемент 212 может передавать данные контроллеру 200 через прямой доступ к запоминающему устройству. Прямой доступ к запоминающему устройству позволяет поисковому элементу 202 передавать информацию непосредственно запоминающему устройству 218 контроллера, не перерывая функций контроллера, работа прямого доступа к запоминающему устройству проиллюстрирована прерывистой линией 216 данных, которая непосредственно соединена из поискового элемента 212 с запоминающим устройством 218 в контроллере 200. Контроллер 200 использует данные, хранящиеся в запоминающем устройстве 218, чтобы присваивать элементы демодуляции 204A - 204N одному из множества информационных сигналов, которые могут содержаться во входном сигнале 210.
Элементы демодуляции 204A - 204N обрабатывают входной сигнал 210 для создания битов 220A - 220N данных реализуемого программными средствами решения, которые объединяются в объединителе 208 символов. Выход объединителя 208 символов (не показан) представляет собой совокупные данные реализуемого программными средствами решения, пригодные для декодирования по Витерби. Элементы демодуляции 204A - 204N также обеспечивают несколько выходных сигналов управления контроллеру 200 через межсоединение 212, которые используются в процессе присвоения.
Каждый из элементов демодуляции 204A - 204N в значительной степени аналогичен остальным по структуре, фиг. 2 более подробно иллюстрирует взятый в качестве примера элемент демодуляции 204 фиг. 1. На фиг.2 предполагается, что входной сигнал 210 является сигналом квадратурной манипуляции с фазовым сдвигом (QPSK), имеющим образцы синфазного (I) сигнала и квадратурно-фазового сигнала (Q). Образцы сигналов I и Q, каждый из которых является величиной из нескольких битов, вводятся в QPSK устройства компенсации расширения 230 и 250.
QPSK устройство компенсации расширения 230 также принимает PN последовательности пилот-сигналов PNI и PNQ из генератора 232 PN последовательностей пилот-сигналов. Генератор 232 PN последовательностей пилот-сигналов генерирует PN последовательности PNI и PNQ, идентичные тем, которые используются на базовой станции, согласно хронированию последовательностей и выходному сигналу состояния (не показано), поступающему из контроллера 200 фиг. 1. QPSK устройство компенсации расширения 230 устраняет PN расширение на необработанных образцах сигналов I и Q, для извлечения обнаруженных образцов компонентов I и Q.
Обнаруженные образцы компонентов I и Q являются выходом из QPSK устройства компенсации расширения 230 и цифровым фильтрам 234 и 236 соответственно, фильтры 234 и 236 обычно конфигурируются как простые цифровые фильтры нижних частот первого порядка. Отфильтрованный выход образцов I и Q из фильтров 234 и 236 представляет собой образцы компонентов I и Q пилот-сигнала и носят название образцов Пилот-сигнала I и Пилот-сигнала Q. Образцы Пилот-сигнала I и Пилот-сигнала Q обеспечиваются для масштабирования данных и последовательности фаз 238, указателя блокировки 258 и векторного произведения 256.
В рассматриваемой для данного примера схеме модуляции пилот-сигнал использует состоящий из одних нулей код Уолша. При использовании состоящего из одних нулей кода Уолша имеет место тот же пилот-сигнал PN расширения, что и сами последовательности PN расширения I и Q. Поэтому снятием PN расширения с образцов сигналов I и Q и фильтрации результирующего сигнала производится восстановление пилот-сигнала.
Для восстановления данных обнаруженные образцы компонентов I и Q также выводятся из QPSK устройства компенсации расширения 230 и выводятся на цифровые смесители 240 и 242 соответственно. Цифровые смесители 240 и 242 принимают последовательность Уолша из генератора 244 последовательностей Уолша. Данная последовательность Уолша идентична последовательности Уолша, присвоенной данному каналу на базовой станции, и выбирается в соответствии с вводом присвоения последовательностей из контроллера 200 (не показано).
Обнаруженные и декодированные образцы компонентов I и Q выводятся из цифровых смесителей 240 и 242, где они подаются в накапливающие регистры 246 и 248 соответственно. Накапливающие регистры 246 и 248 соответственно накапливают обнаруженные и декодированные образцы компонентов I и Q в течение некоторого символьного времени. Выход из накапливающих регистров 246 и 248 представляет собой символьные данные I и Q, носящие название образцов Данных I и Данных Q. Образцы данных I и Данных Q обеспечиваются для масштабирования данных и последовательности фаз 238. Накапливающие регистры 246 и 248 очищаются или переводятся в исходное состояние после вывода данных для накопления следующего набора образцов.
Масштабирование данных и последовательность фаз 238 выполняет операцию скалярного произведения на Пилот-сигнале I и Пилот-сигнале Q из фильтров 234 и 236 и Данных I и Данных Q из накапливающих регистров 246 и 248. Чтобы найти величину компонента вектора данных, который находится в фазе с пилот-сигналом, рассчитывается скалярное произведение  •
•  образцов данных I и Данных Q и рассчитывается вектор образцов Пилот-сигнала I и Пилот-сигнала Q. Наконец, полученные в результате данные выводятся в регистр хранения типа первым пришел - первым обслужен (FIFO) 260.
образцов данных I и Данных Q и рассчитывается вектор образцов Пилот-сигнала I и Пилот-сигнала Q. Наконец, полученные в результате данные выводятся в регистр хранения типа первым пришел - первым обслужен (FIFO) 260.
Регистр хранения FIFO 260 выполняет функции устранения временных сдвигов. Функция устранения временных сдвигов вносит задержку выхода данных 220 из конкретного элемента демодуляции, благодаря чему эти данные могут быть выровнены по данным из других элементов демодуляции. Например, вновь обратившись к фиг.1, предположим, что элемент демодуляции 204A демодулирует данные, которые прошли по прямому лучу из первой базовой станции к подвижной станции. Предположим далее, что элемент демодуляции 204B демодулирует сигнал с многолучевым распространением также из первой базовой станции. Сигнал с многолучевым распространением прошел по обходному направлению и подвижной станции и, следовательно, задерживается по сравнению с прохождением по прямому лучу. Для объединения двух лучей данных в объединителе 208 символов выход элемента демодуляции 204A должен быть задержан и выровнен по выходу элемента демодуляции 204B. Регистр хранения FIFO 260A задержал бы выход данных из элемента демодуляции 204A, чтобы он совпал с выходом элемента демодуляции 204B. Предположим далее, что элемент демодуляции 240C (не показан) демодулирует сигнал из второй базовой станции, расположенной на большом удалении от подвижной станции, и следовательно, имеет задержку больше, чем даже сигнал обходного луча из первой базовой станции. Выход элементов демодуляции 204A и 204B должен быть задержан регистрами хранения FIFO 260A и FIFO 260B соответственно, так что сигналы, вводимые в объединитель 208 символов, выравниваются по времени.
Элемент демодуляции 204 передает контроллеру указатель силы принимаемого сигнала луча демодуляции (RSSI) 262 и сигнал блокировки/разблокировки 204. Накапливающий регистр энергии и детектор блокировки 258 рассчитывает среднюю силу сигнала образцов Пилот-сигнала I и Пилот-сигнала Q. Указатель RSSI 262 луча демодуляции указывает расчетное значение силы пилот-сигнала. Указатель блокировки 258 сравнивает это расчетное значение силы пилот-сигнала с порогом. Если значение превышает порог, то элемент демодуляции находится в блокированном состоянии. Если расчетное значение силы пилот-сигнала падает ниже порога, элемент демодуляции находится в разблокированном состоянии. Когда элемент демодуляции находится в разблокированном состоянии, выход данных 220 может быть нарушен шумом за счет низких уровней сигнала. Контроллер может использовать указание на отсутствие блокировки для объявления выхода данных 220 недействительным, так что он не используется для расчета совокупного результата. Функция блокировки может быть разработана с гистерезисом, вследствие чего после однократного превышения порога блокировки элемент демодуляции не указывает состояние вне блокировки до тех пор, пока сила сигнала не упадет ниже второго, более низкого порога. Контроллер может "отменить присвоение" элемента демодуляции, который не находится в блокированном состоянии, что это элемент демодуляции становится свободным. В качестве альтернативы контроллер может маркировать элемент демодуляции как "свободный" для указания того, что этот элемент демодуляции является кандидатом на повторное присвоение, оставляя при этом элемент демодуляции в активном состоянии в попытке демодулировать сигнал, вследствие чего становится возможным восстановление из неблокированного состояния.
Каждый элемент демодуляции производит оценку погрешности несущей частоты. Векторное произведение 256 дает оценку погрешности частоты 268 путем измерения изменения фазы пилот-сигналов между символами, векторное произведение 256 рассчитывает векторное произведение настоящего вектора пилот-сигналов, состоящего из образцов Пилот-сигнала I и Пилот-сигнала Q, на более ранний вектор пилотов. Оценка погрешности частоты используется в шлейфе отслеживания несущей (не показано).
Элемент демодуляции 204 отслеживает временной сдвиг сигнала, который он демодулирует. Входной сигнал 210, имеющий образцы сигналов I и Q, вводится в QPSK устройство компенсации расширения 250. QPSK устройство компенсации расширения 250 также принимает PN последовательности пилот-сигналов PNI и PNQ из генератора PN последовательностей пилот-сигналов 232 через временной сдвиг 252. Временной сдвиг 252 переводит вперед и задерживает PN последовательности пилот-сигналов PNI и PNQ. QPSK устройство компенсации расширения 250 снимает PN расширение с образцов сигналов I и Q для извлечения образцов переведенных вперед или задержанных обнаруженных компонентов I и Q. Суммирование I и Q (Σ) 252 добавляет полученные результаты к набору PN образцов и обеспечивает выход к отслеживанию времени 254. Отслеживание времени 254 сравнивает суммированные образцы переведенных вперед и задержанных компонентов I и Q и обеспечивает время 270 луча демодуляции, отражающее текущую оценку временного местоположения входного сигнала.
Каждый раз, когда новому сигналу присваивается элемент демодуляции, элемент демодуляции требует некоторого времени для очистки старых данных, которые все еще находятся в луче демодуляции, и вхождения в синхронизм с новым сигналом. Этот процесс дает конечное время, в течение которого элемент демодуляции не формирует действительных выходных данных. Данное изобретение ограничивает число повторных присвоений в расчете на одно наблюдение (как описано ниже), благодаря чему отсутствует потеря крупных блоков данных. Кроме того, этот способ включает операцию гистеретического сравнения, которая ограничивает чрезмерное повторное присвоение между двумя сходно выгодными сигналами.
Входной сигнал 210 обеспечивает сигналы поисковому элементу и элементам демодуляции. Входной сигнал 210 может содержать пилот-сигналы из большого числа базовых станций. Он может также содержать информационные сигналы из значительного количества базовых станций, предназначенные другим подвижным станциям, а также настоящей подвижной станции, фиг.3A - 3C иллюстрируют взятый в качестве примера формат для просмотра компонентов входного сигнала 210, необходимых для разработки способа данного изобретения. Разработанный ниже специфический способ предполагает, что для присвоения имеются три элемента демодуляции, фиг.3A иллюстрирует зависимость силы пилот-сигнала от времени для первой базовой станции или сектора, фиг. 3B - 3C иллюстрируют зависимость силы пилот-сигнала от времени для второй и третьей базовой станции или сектора соответственно. На фиг. 3A - 3C на горизонтальной оси отложены позиции времени, а на вертикальной - позиции энергии в дБ. На фигуре 3A четыре луча расположены выше минимального уровня шума и маркированы как лучи 300, 302, 304 и 306. Луч 300 приходит по времени первым, и можно предположить, что это наиболее прямой имеющийся луч из базовой станции к подвижной станции. Лучи 302, 304 и 306 следуют последовательно во времени и представляют собой сигналы с многолучевым распространением того же сигнала, что и луч 300. Линия 320 представляет порог, ниже которого уровень сигнал-шум не обеспечивает надежных данных.
Фиг. 3B и фиг. 3C представляют входные сигналы из двух других базовых станций или секторов базовых станций. Временное смещение среди этих трех станций не показано в явном виде, фиг.3B и 3C могут рассматриваться как стандартизованные по задержке фиг.3A в целях иллюстрации. На фиг.3B два луча выше минимального уровня шума и маркированы как лучи 303 и 310. Луч 303 приходит по времени первым, а луч 310 следует во времени за ним. Вновь линия 320 представляет порог, ниже которого уровень сигнал-шум не обеспечивает надежных данных. На фиг. 3C два луча расположены выше минимального уровня шума и маркировки как лучи 312 и 314. Луч 312 приходит по времени первым, а луч 314 следует за ним спустя некоторое время. Вновь линия 320 представляет порог, ниже которого уровень сигнал-шум не обеспечивает надежных данных.
Как обсуждалось выше, управление мощностью подвижной станции имеет критически важное значение для общих рабочих показателей системы. Каждая подвижная станция должна передавать минимальный возможный сигнал для надежной связи с целью получить большую пропускную способность системы. Поскольку каждая базовая станция, через которую подвижная станция осуществляет связь, независимо управляет мощностью передачи подвижной станции, этот способ содействует высокой степени разнесения базовых станций или секторов базовой станции. Для обеспечения максимальной пропускной способности системы подвижная станция должна сократить свою мощность передачи, если любая базовая станция передает подвижной команду на выполнение этого действия. Подвижная станция увеличивает мощность передачи лишь в том случае, если каждая базовая станция, через которую она осуществляет связь, передает команду на увеличение мощности передачи. Этот способ содействует разнесению базовых станций, вследствие чего информация об управлении мощностью из конкретной базовой станции обязательно доходит до подвижной станции.
В описанной здесь взятой в качестве примера системе подвижной станции требуется лишь одна активная базовая станция, когда подвижная станция находится в свободном состоянии (например, подвижная станция включена, но не участвует в непрерывной двусторонней связи с базовой станцией). Как обсуждалось выше, когда подвижная станция входит в режим расширенной связи, такой, как, например, используемый в процессе телефонного вызова, связь может быть установлена со множеством базовых станций. Описанный ниже способ присвоения относится к работе в свободном режиме, а также в период расширенной связи. Способ данного изобретения упрощается, когда активна лишь одна базовая станция, когда, например, подвижная станция находится в свободном режиме. Данное изобретение не ограничено системами, работающими подобным образом.
Фиг. 4 является кратким представлением способа присвоения взятого в качестве примера элемента демодуляции для подвижной станции в соответствии с данным изобретением. Этот способ реализуется циклически. На первом этапе каждого цикла поисковый элемент производит наблюдение зависимости силы пилот-сигналов от времени для каждой активной базовой станции, как указано блоком 350 на фиг. 4. Под активной базовой станцией понимается базовая станция, через которую была установлена связь. Эти базовые станции вместе называются набором активных базовых станций. Поисковый элемент сканирует временное окно вокруг ожидаемого времени поступления сигнала из каждой базовой станции, что позволяет найти сигналы с многолучевым распространением. Поисковый элемент создает набор данных лучей наблюдения, включающих временной сдвиг и силу сигнала.
Контроллер согласует лучи наблюдения с лучами демодуляции, как указано блоком 352. Лучи демодуляции представляют собой лучи, которые в настоящий момент присвоены элементам демодуляции. Соответствующая информация о лучах (временной сдвиг и сила сигнала) из каждого элемента демодуляции собирается контроллером.
Как описано выше, главным соображением для присвоения элемента демодуляции лучу является количество других
лучей из той же базовой станции или сектора, которые в настоящий момент присвоены элементам демодуляции. Если луч наблюдения исходит из базовой станции, имеющей сигнал, который в настоящий момент не демодулируется каким-либо элементом демодуляции, то луч наблюдения становится кандидатом для присвоения элемента демодуляции. Если присвоение элемента демодуляции должно быть снято с какого-либо луча и повторно присвоено лучу наблюдения в блоке 354, то способ возвращается к блоку 350, чтобы избежать повторного присвоения более чем одного элемента демодуляции в расчете на один цикл, как указано блоком 356. Если ни один элемент демодуляции не был повторно присвоен, то элементы демодуляции могут присваиваться в соответствии с силой сигнала, как указано блоком 358. Затем способ возвращается блоку 350, и начинается следующий цикл.
Фиг. 5A - 5D являются подробным примером краткого представления способа присвоения элементов демодуляции фиг.4. На фиг.5A - 5D предполагается, что имеется три элемента демодуляции для присвоения. Однако при рассмотрении реализации фиг.5A - 5D будут вполне очевидны многие выполнения данного изобретения. Например, количество элементов демодуляции может быть больше или меньше трех. Следовательно, фиг.5A - 5D не должны ограничивать данное изобретение, а предназначены для того, чтобы служить предпочтительным выполнением.
Фиг. 5A начинает цикл и примерно эквивалентна блоку 350 фигуры 4. Блок 10 указывает начальную функцию способа. Блок 12 очищает перечень лучей наблюдения, найденных в последнем цикле. Блок 14 устанавливает первый сектор базовой станции, с которым установлена связь, как первый рассматриваемый сектор для процесса поиска. Блок 16 передает поисковому элементу команду на поиск временного окна вокруг ожидаемого времени поступления сигналов из рассматриваемого сектора. Блок 18 находит не более трех наибольших локальных максимальных значений из поиска рассматриваемого сектора. В этом примере нахождение более трех наибольших значений неэффективно, так как для присвоения имеется лишь три элемента демодуляции и элемент демодуляции ни в коем случае не будет присвоен четвертому наиболее крупному лучу наблюдения из одного сектора базовой станции.
Во взятом в качестве примера выполнении обнаруживается локальный максимум в пределах поискового окна на основе использования образцов наблюдения, разнесение между которыми во времени составляет 0,5 элементарных посылки сигнала данных. При использовании меньшей разрешающей способности образцов наблюдения один луч сигнала может создать более одного отдельного пика. В такой системе отдельные пики могли бы использоваться для создания одного локального максимума для целей присвоения элементов демодуляции.
Блок 20 добавляет информацию каждого из трех максимумов, которые превышают минимальный порог уровня сигнала в перечень лучей наблюдения. Если в активном наборе существует сектор, в отношении которого поиск не производился, блок 22 направляет способ блоку 26. Блок 26 выбирает следующий рассматриваемый сектор, а блоки с 16 по 22 повторяются для следующего рассматриваемого сектора. Если рассматриваемый сектор является последним сектором, в отношении которого производится поиск, перечень наблюдения полон. Блок 22 направляет процесс к следующей части способа через соединительный блок 24.
Достигнув набора лучей наблюдения, способ продолжается на фиг.5B, которая примерно эквивалентна блоку 352 фиг.4. Соединительный блок 24 направляет процесс в блок 32. Блок 32 назначает рассматриваемый луч демодуляции одному из лучей, который в настоящий момент демодулируется элементом демодуляции. Блок 34 проверяет состояние блокировки/разблокировки элемента демодуляции, соответствующего рассматриваемому лучу демодуляции. Если элемент демодуляции находится вне блокировки, контроллер может снять присвоение с элемента демодуляции или маркировать элемент демодуляции как "свободный", как указано блоком 50. В таком случае отсутствуют действительные данные для согласования с лучами наблюдения. Действие, соответствующее рассматриваемому лучу демодуляции, завершено, и блок 50 направляет процесс в блок 46.
Если рассматриваемый элемент демодуляции в настоящее время находится в состоянии блокировки, блок 36 пытается согласовать временной сдвиг луча демодуляции с аналогичной информацией в перечне лучей наблюдения. Как правило, каждый луч демодуляции согласовывается с, по крайней мере, одним лучом наблюдения. Другими словами, если луч из базовой станции достаточно сильный, чтобы его можно было демодулировать, он должен поддаваться обнаружению поисковым элементом. Иногда поисковый элемент может пропустить луч и поэтому не войти в луч, соответствующий лучу демодуляции в перечне лучей наблюдения. Элемент демодуляции более точно оценивает уровень сигнала и временной сдвиг луча, чем поисковый элемент. Поэтому данный способ считает, что элемент демодуляций точен и что такой луч существует. Следовательно, если отсутствуют вводимые данные луча наблюдения для луча демодуляции, блок 52 создает вводимые данные луча наблюдения, соответствующего лучу демодуляции. Действие, соответствующее рассматриваемому лучу демодуляции, завершено, и блок 52 направляет процесс в блок 46.
Если существует луч наблюдения, который соответствует рассматриваемому лучу демодуляции, блок 38 запрашивает, является ли рассматриваемый луч демодуляции первым лучом демодуляции, согласующимся с конкретным лучом наблюдения. Если рассматриваемый луч демодуляции является первым, то действие, соответствующее рассматриваемому лучу демодуляции, завершено, и блок 38 направляет процесс в блок 46.
Если рассматриваемый луч демодуляции не является первым лучом демодуляции, согласующимся с конкретным лучом наблюдения, то практически один и тот же луч демодулируют два элемента демодуляции. Данный сценарий может быть обычным явлением. Каждый элемент демодуляции отслеживает сигнал, которому он был первоначально присвоен. Обычно два сигнала с многолучевым распространением со временем сливаются в один луч или почти в один и тот же луч. Блок 38 идентифицирует такую ситуацию. Если рассматриваемый луч демодуляции не является первым лучом демодуляции, согласующимся с конкретным лучом наблюдения, блок 40 определяет, какой луч демодуляции имеет больший уровень сигнала. Если рассматриваемый элемент демодуляции имеет больший уровень сигнала, блок 42 снимает присвоение или маркирует как свободный предыдущий элемент демодуляции, который имеет луч, согласующийся с этим же лучом наблюдений. Если рассматриваемый элемент демодуляции слабее предыдущего луча, блок 44 снимает присвоение или помечает как свободный элемент демодуляции, соответствующий рассматриваемому лучу демодуляции. Действие, соответствующее рассматриваемому лучу демодуляции, завершено.
Если существует луч демодуляции, который еще не был рассмотрен, блок 46 направляет способ блоку 48. Блок 48 выбирает следующий рассматриваемый луч демодуляции, а блок 34 начинает повторять процесс для этого луча демодуляции. Если рассматриваемый луч демодуляции является последним из рассматриваемых лучей демодуляции, то блок 46 направляет процесс в следующую часть способа через соединительный блок 54.
Достигнув набора лучей наблюдения и согласовав лучи демодуляции с лучами наблюдения, способ продолжается на фиг.5C, которая примерно эквивалентна блокам 354 и 356 фиг.4. Соединительный блок 54 направляет процесс в блок 60. Блок 60 назначает рассматриваемый луч наблюдения лучу наблюдения с наибольшим уровнем сигнала. Блок 60 также отмечает сектор базовой станции, которому соответствует луч наблюдения. Способ фиг.5 подчеркивает разнесение секторов как наиболее выгодное для управления мощностью, учитывая конкретную реализацию системы. Способ в соответствии с данным изобретением мог бы делать упор на разнесение базовых станций. Упор на разнесение базовых станций по сравнению с разнесением секторов может обеспечивать преимущество в других системах.
Для обеспечения максимального разнесения секторов блок 62 запрашивает, присвоен ли какой-либо элемент демодуляции для демодулирования любого луча из сектора рассматриваемого луча наблюдения. Если это так, то действие, соответствующее рассматриваемому лучу наблюдения, завершено. Если элемент демодуляции, присвоенный какому-нибудь лучу из сектора рассматриваемого луча наблюдения, отсутствует, процесс продолжается к блоку 64. Блок 64 запрашивает, имеется ли какой-либо свободный или неприсвоенный элемент демодуляции. Если неприсвоенный или свободный элемент демодуляции существует, блок 72 присваивает этот неприсвоенный или свободный элемент демодуляции рассматриваемому лучу демодуляции, и действие, соответствующее рассматриваемому лучу наблюдения, завершено.
Процесс, показанный на фиг.5C, может продолжаться для следующего луча наблюдения. Поэтому способ продолжается из блока 62 и из блока 72 в блок 74. Блок 74 запрашивает, существует ли остающийся луч наблюдения. Если остающийся луч наблюдения существует, блок 70 выбирает следующий наиболее сильный луч наблюдения в качестве рассматриваемого луча наблюдения, и процесс продолжается через блок 62. Если дополнительного луча наблюдения не существует, процесс продолжается через соединительный блок 78 к фиг.5D.
Продолжая из блока 64, если не существует неприсвоенного или свободного элемента демодуляции, то блок 66 запрашивает, присвоены ли несколько элементов демодуляции какому-либо одному сектору. Если сектор, имеющий более одного луча демодуляции, существует, то блок 76 повторно присваивает элемент демодуляции, имеющий такой наиболее слабый луч демодуляции. Такое повторное присвоение является единственным повторным присвоением для данного цикла, и процесс продолжается через соединительный блок 80 к началу нового цикла на фиг.5A.
Продолжая из блока 66, если не существует сектора, имеющего более одного луча демодуляции, то блок 68 запрашивает, имеет ли какой-либо луч демодуляции силу сигнала по меньшей мере на 3 дБ меньше силы сигнала рассматриваемого луча наблюдения. Смещение на 3 дБ представляет собой окно гистерезиса для предотвращения чрезмерного повторного присвоения между двумя аналогично выгодными лучами. Могли бы использоваться и большие или меньшие окна гистерезиса в зависимости от применения системы. Если такой луч на 3 дБ слабее существует, блок 76 повторно присваивает элемент демодуляции, соответствующий такому наиболее слабому лучу демодуляции, лучу наблюдения. Такое повторное присвоение является единственным повторным присвоением для данного цикла, и процесс продолжается через соединительный блок 80 до начала нового цикла на фиг.5A. Если такого более слабого на 3 дБ луча не существует, остальные лучи наблюдения прошли бы через фиг.5C таким же образом, как и рассматриваемый луч демодуляции. Поэтому, если такого луча не существует, что означает, что в ходе данного цикла повторные присвоения не имели место, то процесс продолжается из блока 68 через соединительный блок 78 к фиг.5D.
Достигнув набора лучей наблюдения и согласовав лучи демодуляции с лучами наблюдения, способ продолжается на фиг.5D, если в ходе данного цикла до сих пор не имело место повторное присвоение. Фиг. 5D примерно эквивалентна блоку 358 фиг. 4. Соединительный блок 78 направляет процесс в блок 84. Блок 84 назначает рассматриваемый луч наблюдения лучу наблюдения с наибольшим уровнем сигнала. Блок 38 также отмечает сектор базовой станции, которому соответствует рассматриваемый луч наблюдения. Способ фиг. 5D подчеркивает разнесение секторов как наиболее выгодное для управления мощностью. Однако, как обсуждалось выше, альтернативная реализация данного изобретения могла бы делать упор на разнесении базовых станций независимо от сектора.
Блок 86 запрашивает, присвоен ли какой-либо элемент демодуляции рассматриваемому лучу наблюдения. Если элемент демодуляции имеет луч демодуляции, соответствующий рассматриваемому лучу наблюдения, то блок 104 запрашивает, существуют ли какие-либо дополнительные лучи наблюдения. Если существует еще один луч наблюдения, блок 100 назначает луч наблюдения со следующим по высоте уровнем сигнала в качестве рассматриваемого луча наблюдения и отмечает сектор, соответствующий этому новому рассматриваемому лучу наблюдения. Данный процесс вновь начинается в блоке 86. Если рассматриваемый луч наблюдения является последним из рассматриваемых лучей наблюдения, то процесс продолжается через соединительный блок 80 до начала нового цикла, показанного на фиг. 5A.
Если не существует элемента демодуляции, имеющего луч демодуляции, который соответствовал бы рассматриваемому лучу наблюдения, то блок 88 запрашивает, существует ли неприсвоенный или свободный элемент демодуляции. Если существует неприсвоенный или свободный элемент демодуляции, то блок 102 присваивает этот неприсвоенный или свободный элемент демодуляции рассматриваемому лучу наблюдения. Процесс продолжается через блок 104, как описано выше. Если неприсвоенного или свободного элемента демодуляции не существует, блок 90 выбирает наиболее слабый луч демодуляции для сравнения с рассматриваемым лучом наблюдения.
Блок 92 запрашивает, соответствует ли луч демодуляции для сравнения сектору рассматриваемого луча наблюдения. Если луч демодуляции для сравнения исходит из того же сектора, что и рассматриваемый луч наблюдения, блок 106 запрашивает, является ли сравниваемый уровень сигнала луча демодуляции более чем на 3 Дб слабее, чем уровень сигнала рассматриваемого луча наблюдения. Дельта в 3 Дб является окном гистерезиса для предотвращения чрезмерного повторного присваивания между двумя одинаково выгодными лучами. Может применяться большее или меньшее окно гистерезиса, в зависимости, от запроса системы. Если уровень сигнала луча наблюдения не является, по крайней мере, на 3 Дб больше, чем у сравниваемого луча демодуляции, то цикл продолжается, как указывается, блоком соединений 80. Если уровень сигнала луча наблюдения, по крайней мере, на 3 Дб больше, чем уровень сигнала сравниваемого луча демодуляции, то элемент демодуляции, соответствующий сравниваемому лучу демодуляции, повторно присваивается рассматриваемому лучу наблюдения, как указывалось блоком 108. Это повторное присваивание является единственным повторным присваиванием для этого цикла и цикл продолжается на фиг. 5A, как указывается, блоком соединения 80.
Продолжаем блоком 92, если сравниваемый луч демодуляции не принадлежит тому же сектору, что и рассматриваемый луч наблюдения, то блок 94 запрашивает, является ли сравниваемый луч демодуляции единственным лучом демодуляции из сектора, соответствующего сравниваемому лучу демодуляции. Если сравниваемый луч демодуляции не является единственным лучом демодуляции из своего сектора, то процесс продолжается от блока 106, как это было описано выше.
Если сравниваемый луч демодуляции является единственным лучом демодуляции из своего сектора, то блок 96 запрашивает, существует ли еще луч демодуляции. Если больше лучей демодуляции не осталось, то цикл продолжается на фиг. 5A, как указывается блоком соединений 80. Если существует оставшийся луч демодуляции, то сравниваемый луч демодуляции устанавливается блоком 98 для луча демодуляции, имеющего следующую, наиболее слабую мощность сигнала. Процесс продолжается в блоке 92.
Для примера предположим, что способ, согласно фиг. 5A - 5D осуществляется, основываясь на сигналах, показанных на фиг. 3A - 3C. Предположим, что никакие другие сектора базовых станций не являются доступными для подвижной станции. Предположим, что тройка элементов демодуляции присвоена следующим образом (табл. 1),
где сектор соответствует номерам фигур на фиг. 3A - 3C. Поток начинается на фиг. 5A. Список наблюдений освобождается и сектор фиг. 3A устанавливается как первый рассматриваемый сектор (блоки 10 - 14). Поисковый элемент начинает поиск многолучевых сигналов, как показано на фиг. 3A и обозначенных следующим образом (табл. 2).
Луч 304 имеет наиболее низкий уровень в этой четверке уровней и находится ниже порогового уровня, как это указано пороговой линией 320. Поисковый элемент находит три максимума (блоки 16-20). Следовательно, последние данные, которые добавляются к списку лучей наблюдения для этого цикла, являются следующими (табл. 3).
Сектор 3B устанавливается как следующий рассматриваемый сектор (блоки 22 и 26). Еще два входных сообщения добавляются к списку лучей наблюдения следующим образом (блоки 16-20) (табл. 4).
Сектор 3C устанавливается как следующий рассматриваемый сектор (блоки 22 и 26). Еще два входных сообщения добавляются к списку лучей наблюдений следующим образом (блоки 16-20) (табл. 5).
Таким образом, описок лучей наблюдений завершен и поток продолжается на фиг. 5B.
Фиг. 5B начинается установкой луча элемента демодуляции 1 в качестве первого рассматриваемого луча демодуляции. Так как луч демодуляции 1 заблокирован, то луч демодуляции спаривается с лучом наблюдения (блок 34 и 36). Предположим, что в этом примере t1 приблизительно равно t10 и, таким образом, луч демодуляции спарен с лучом наблюдения 300. Из-за того, что луч демодуляции 1 является первым лучом демодуляции, спаренным с лучом наблюдения 300, то процесс продолжается для следующего луча демодуляции (блоки 38 и 46).
Луч демодуляции 2 устанавливается как рассматриваемый луч демодуляции (блок 48). Так как луч демодуляции 2 незаблокирован, то луч демодуляции 2 обозначается как свободный (блоки 34 и 50). Процесс продолжается для следующего луча демодуляции (блок 46).
Луч демодуляции 3 устанавливается как рассматриваемый луч демодуляции (блок 48). Так как луч демодуляции 3 заблокирован, то луч демодуляции спаривается с лучом наблюдения (блок 34 - 36). Предположим, что в этом примере t3 также приблизительно равна t10 и, таким образом, луч демодуляции 3 спаривается с лучом наблюдения 300, как это делалось для луча демодуляции 1. Так как луч демодуляции 3 является вторым лучом демодуляции, который составляет пару с лучом наблюдения 300, то процесс сравнивает амплитуды этих двух лучей (блоки 33 и 40). Предположим, что в этом примере A3 < A1 и, следовательно, элемент демодуляции 3 обозначен свободным (блок 44). Так как луч демодуляции 3 является последним лучом демодуляции, то функции фиг. 5B завершены и процесс продолжается на фиг. 5C, используя следующий список лучей демодуляции (табл. 6),
и следующий список лучей наблюдения (табл. 7).
Допустим, что A14 является наиболее высоким уровнем сигнала, фиг. 5C начинается установкой луча наблюдения 303 в качестве рассматриваемого луча наблюдения, а 3B, в качестве сектора, содержащего этот луч (блок 60). В этом случае, ни один элемент демодуляции не присваивается сектору 3B и элемент демодуляции 2 является свободным (блоки 62 и 64). Следовательно, элемент демодуляции 2 присваивается лучу наблюдения 308 и получается новый список лучей демодуляции (табл. 8).
Допустим, что A11 является следующим, наиболее сильным уровнем сигнала, луч наблюдения 302 является следующим рассматриваемым лучом наблюдения, а 3A является сектором, содержащим этот луч (блоки 74 и 70). Так как уже существует элемент демодуляции, присвоенный сектору 3А, то луч наблюдения 310 устанавливается как следующий рассматриваемый луч наблюдения, а 3B как сектор, содержащий этот луч (блоки 62, 74 и 70), допустим, что A15 является следующим наиболее высоким уровнем сигнала. Этот процесс будет продолжаться вдоль лучей наблюдения 300 и 306, в предположении, что A10 и A13 следуют друг за другом в порядке мощности сигнала. Когда луч наблюдения является рассматриваемым лучом, и 3C является сектором, содержащим этот луч, то свободный до сих пор элемент демодуляции 3 присваивается лучу наблюдения 314 (блоки 62, 64 и 72). Луч наблюдения 312 устанавливается как рассматриваемый луч наблюдения (блоки 74 и 70) и так как луч демодуляции 3 присвоен сектору 3C, то функции фиг. 5C заканчиваются (блоки 62 и 74) и список лучей демодуляции будет следующим (табл. 9).
В этом сценарии ни один элемент демодуляции не был повторно присвоен до этого момента, так что поток продолжается на фигуре 5D. Луч наблюдения 308 вновь устанавливается как рассматриваемый луч наблюдения (блок 84). Так как луч наблюдения 308 присвоен элементу демодуляции 2, то процесс продолжается, используя луч наблюдения 302 как рассматриваемый луч наблюдения (блоки 86, 104 и 100). Луч наблюдения 302 не был демодулирован каким-либо элементом демодуляции и, следовательно, луч демодуляции 3 устанавливается в качестве рассматриваемого луча демодуляции, так как он является наиболее слабым лучом демодуляции (блоки 86, 88 и 90). Так как луч демодуляции не принадлежит тому же сектору, что и луч наблюдения 302 и так как ни один другой элемент демодуляции не присваивался сектору 3C, то луч демодуляции 1 устанавливается в качестве рассматриваемого луча демодуляции, так как он является следующим, наиболее слабым лучом демодуляции (блоки 92, 94, 96 и 98). Луч демодуляции 1 содержится в том же секторе, что и луч наблюдения 3A (блок 92). В предположении, что A11 более, чем на 3 Дб больше, чем A1, элемент демодуляции 1 повторно присваивается лучу наблюдения 302. Это повторное присваивание завершает процесс этого цикла. Луч наблюдения очищается (блок 12) для следующего цикла и список лучей демодуляции будет следующим (табл. 10).
Способ базовой станции менее сложен, чем способ подвижной станции. В отличие от подвижной станции, базовая станция, имеющая много секторов, не нуждается в разнесении секторов, так как никакая аналоговая информация управления мощностью не посылается от подвижной станции. Способ базовой станции направлен на присваивание всех доступных элементов демодуляции наиболее сильному лучу, избегая чрезмерные повторные присваивания.
Данный способ, применяемый базовой станцией, предполагает, что базовая станция содержит много независимых элементов демодуляции, фиг. 6 иллюстрирует исполнение такой базовой станции. Фигура представляет трехсекторную базовую станцию, где каждая антенна 422A - 422C является антенной для одного сектора. Каждая из антенн 422A'- 422C' соответствует одной из антенн 422A - 422C и является разнесенной антенной для сектора, соответствующего антенне, пронумерованной аналогичным образом. Каждая из антенн 422A - 422C покрывает ту же зону действия, что и соответствующая антенна среди антенн 422A' - 422C'. В типичной базовой станции, антенны 422A - 422C имеют перехлестывающиеся зоны действия, которые подразделяют базовую станцию на три сектора, в которых каждая антенна покрывает более чем треть полной зоны действия базовой станции. Поэтому сигнал от единичной подвижной станции может присутствовать одновременно более чем в одной антенне. Количество секторов и количество антенн, присвоенных каждому сектору, может меняться. Изменения такого типа не влияют на общие принципы данного изобретения.
Антенны 422A, 422B, 422C, 422A', 422B' и 422C' передают принятый сигнал на обработчики RF и цифровые преобразователи 424A, 424B, 424C, 424A', 424B' и 424C' соответственно. Обработчики RF и цифровые преобразователи 424A, 424B, 424C, 424A', 424B' и 424C' обрабатывают сигналы RF и преобразуют сигнал в цифровые биты. Обработчики RF и цифровые преобразователи 424A, 424B, 424C, 424A', 424B' и 424C' фильтруют цифровые биты и передают результирующие цифровые биты в порт интерфейса 426. Порт интерфейса 426 может соединять любой из шести лучей приема сигналов с любым из поисковых элементов или элементов демодуляции под управлением контроллера 400 посредством взаимосвязи 412.
Поисковые элементы и элементы демодуляции также управляются контроллером 400 посредством взаимосвязи 412. Поисковые элементы 402A - 402N непрерывно сканируют окно временной области для поиска информационного сигнала конкретной подвижной станции во время управления контроллером системы 400. Поисковые элементы 402A - 402N могут также сканировать множество сдвигов по времени около номинального момента поступления искомого сигнала из множества переданных многолучевых сигналов.
Поисковые элементы 402A - 402N пересылают переданные данные на контроллер 400 для хранения в памяти 418. Поисковые элементы 402A - 402N могут передавать данные через стандартную шину или поисковые элементы 402A - 402N могут передавать данные в память 418 через непосредственный доступ к памяти (не показан), как это обсуждалось ранее в ссылке к фиг. 1. Контроллер 400 применяет данные, хранящиеся в памяти 418, для присвоения элементов демодуляции 404A - 404N одному из совокупности информационных сигналов единичной подвижной станции.
В данном примере исполнения, для поддержания высокого объема системы, каждая подвижная станция в этой системе не передает непрерывно пилот-сигнал. Отсутствие пилот-сигнала в линии обратного направления повышает время, необходимое для проведения, при помощи единичного поискового элемента наблюдения, всех возможных сдвигов по времени, во время которых может быть принят сигнал подвижной станции. Поэтому, для обеспечения быстрого поискового процесса, применяется более одного поискового элемента для осуществления полного поиска. Каждый поисковый элемент 402A - 402N присваивается контроллером каждому набору сдвигов по времени. Каждый поисковый элемент 402A - 402N возвращает контроллеру 400 результаты осуществленного им поиска. Контроллер 400 табулирует эти результаты для использования в системе присвоения.
Элементы демодуляции 404A - 404N вырабатывают биты данных 420A - 420N, которые объединяются в объединителе символов 408. На выходе объединителя символов 408 (не показан) объединяются данные, предназначенные для программного обеспечения, пригодные для декодирования Витерби. Необходимо отметить, что объединитель символов 408 может объединять сигналы и от одного сектора, для обеспечения выходной информацией, или он может объединять символы от многих секторов, если такой выбор будет сделан портом интерфейса 426. Когда объединитель символов 408 объединяет сигналы от подвижной станции, которые передаются через более чем один сектор, то к такому состоянию обращаются как к более мягкой передаче. Базовая станция может передавать выходную информацию объединителя символов 408 на контроллер сотовой системы, где символы от произвольной подвижной станции также объединяются с сигналами от других базовых станций для обеспечения единой выходной информации. К этому процессу обращаются как к мягкой передаче. Элементы демодуляции 404A - 404N также обеспечивают несколькими выходными сигналами управления контроллер 400 посредством взаимосвязи 412, которая применяется для процесса присваивания.
Каждый элемент демодуляции 404A - 404N в высокой степени аналогичен по структуре другим. Фиг. 7 иллюстрирует в дальнейших подробностях элемент демодуляции 404 фиг. 8. Предполагается, что на фиг. 7 цифровой выходной сигнал является сигналом с квадратурной фазовой манипуляцией (QPSK), имеющим синфазные (I) и сдвинутые на 90 градусов по фазе (Q) вырезки сигналов. I и Q вырезки сигналов, каждая из которых имеет многобитную структуру, вводятся в устройство прореживания и устройство отмены расширения 430. Обычно, вырезки сигналов I и Q дополнительно расчленяются таким образом, чтобы входная информация принималась при скорости передачи данных больше, чем скорость элементарной посылки. В устройстве прореживания и устройстве отмены расширения 430 данные прореживаются для преобразования скоростей передачи дополнительно расчлененных сигналов к PN скоростям передачи элементарных посылок. Затем производится отмена расширения данных устройством прореживания и устройством отмены расширения 430 посредством использования той же самой PN последовательности, которая использовалась для модуляции этих сигналов в подвижной станции.
Устройство прореживания и устройство отмены расширения 430 передает выходные компоненты I и Q сигналов, в которых отменено расширение, в накопитель 438. Накопитель 438 накапливает компоненты I и Q сигналов, в которых отменено расширение, в пределах элементарного периода Уолша для вырабатывания накапливаемых элементарных I и Q данных. Накопленные I и Q элементарные данные затем обрабатываются быстрым преобразователем Адамара (RHT) и селектором 440. FHT часть FHT и селектор 440 осуществляет взаимосвязь накопленных I и Q элементарных данных со всевозможными последовательностями Уолша. Каждый из результатов взаимосвязи I и Q затем используется для оценки величины соответствующего символа Уолша. Оценки величин результатов каждой взаимосвязи I и Q сравниваются между собой. Символ Уолша, соответствующий результату взаимосвязи I и Q и имеющий наибольшую величину, выбирается селективной частью FHT и селектором 440 в качестве демодулированного символа Уолша. Демодулированный символ Уолша выдается совместно с соответствующей оцененной величиной символа Уолша.
Как и в случае подвижной станции, в соответствии с различными временами поступления лучей сигналов, присвоенных различным элементам демодуляции, элемент демодуляции 404 осуществляет также выравнивание символов. Отклонение во времени 442 задерживает выходную информацию таким образом, что элемент демодуляции вырабатывает синхронизированные данные по отношению к другим элементам демодуляции.
Накопитель энергии и детектор блокировки 444 суммирует последовательность следующих друг за другом величин символов Уолша, результирующая сумма выдается как мощность сигнала 464 на контроллер для использования в способе присваивания. Результирующая сумма также сравнивается с пороговым значением для указания заблокированного или незаблокированного состояния.
Время поступления луча сигнала, присвоенного элементу демодуляции 404, может изменяться во времени из-за передвижения подвижной станции или изменения окружения подвижной станции. Поэтому, подобно подвижной станции, элемент демодуляции базовой станции содержит сопряжение во времени каждой схемы. Устройство прореживания и устройство отмены расширения 430 выдают более раннюю и более позднюю версию компонентов I и Q, сигналов, в которых отменено расширение, для использования в процессе сопряжения по времени. Накопитель 432 накапливает более ранние и более поздние компоненты I и Q сигналов, в которых отменено расширение, в пределах элементарного периода Уолша для обеспечения накопления раньше и позже элементарными I и Q данными. Создание ранней и поздней метрики 434 умножает накопленные последовательностью Уолша раньше и позже элементарные I и Q данные, в соответствии с демодулированным символом Уолша и накапливает результат для обеспечения ранними и поздними символами Уолша. Величина ранних символов Уолша находится на основе ранних I и Q символов Уолша, а величина поздних символов Уолша находится на основе поздних I и Q символов Уолша. Величина ранних символов вычитается из величины поздних символов для получения метрики ошибок. Метрика ошибок является выходной информацией для сопряжения по времени 436. Сопряжение по времени 436 использует метрику ошибок для определения, осуществляется ли операция отмены расширения в устройстве прореживания и устройстве отмены расширения 430 с опережением, с отставанием, или во время. Сопряжение во времени 436 поддерживает также трассу времени луча абсолютной демодуляции 470 элемента демодуляции для передачи на контроллер.
Поисковые элементы аналогичны элементам демодуляции с тем отличием, что поисковые элементы не имеют средств сопряжения по времени и обнаружения блокировки. Сопряжение по времени не используется в поисковых элементах, так как процесс поиска осуществляется быстро благодаря связности канала. Другими словами, дрейф во времени незначителен в течение времени, используемого для осуществления единичного поиска.
Фиг. 8 является кратким обзором способа присваивания экземпляра элемента демодуляции, разделенной на сектора базовой станции, в соответствии с данным изобретением. Данный способ выполняется на циклической основе. На первом шаге каждого цикла поисковый элемент осуществляет наблюдение за изменением мощности сигнала подвижной станции во времени для единичной подвижной станции, с которой установлена связь, что указано блоком 450 на фиг. 8. Каждый поисковый элемент осуществляет сканирование временного окна около ожидаемого времени приема сигнала от подвижной станции, чтобы можно было найти многолучевые сигналы. Контроллер создает набор данных лучей наблюдения на основе данных поисковых элементов, содержащих сдвиги по времени и мощности сигналов.
Контроллер спаривает лучи наблюдения с лучами демодуляции, как указывается блоком 452. Лучи демодуляции являются лучами, которые в текущий момент присваиваются элементам демодуляции. Информация о соответствующем луче (сдвиг по времени и мощность сигнала) от каждого элемента демодуляции собирается контроллером.
Как было описано выше, основным соображением во время присваивания элементов демодуляции в базовой станции должно быть получение наибольшего возможного уровня полного сигнала. Все свободные и незаблокированные элементы демодуляции присваиваются лучам наблюдения сигналов наибольшей мощности, что не соответствуют лучам демодуляции в блоке 454. Кроме этого, в каждом цикле, вплоть до фиксированного числа элементов демодуляции может быть повторно присвоено лучам наблюдения, имеющим более мощный сигнал, чем исходный луч демодуляции в блоке 456. От блока 456 этот цикл возвращается к блоку 450.
Фиг. 9A - 9D являются развитием способа фиг. 8, путем дополнения некоторыми деталями. Этот экземпляр блок-схемы представляет систему, имеющую четыре элемента демодуляции и восемь поисковых элементов. Развитый способ соответствует данному изобретению как предпочтительное исполнение. В этом выполнении количество повторных присвоений было ограничено двумя за цикл. Другие максимальные числа можно выбирать не отклоняясь от указаний данного изобретения. Кроме этого, многие другие исполнения данного изобретения с готовностью откроются после рассмотрения исполнения на фиг. 9A - 9D. Поэтому, фиг. 9A - 9D не должны восприниматься как ограничения данного изобретения, они являются предпочтительным исполнением.
Фиг. 9A начинается циклом и является грубым эквивалентом блока 450 фиг. 8. Блок 510 обозначает функцию начала данного способа. Блок 512 очищает список лучей наблюдения, найденных на последнем цикле. Блок 516 отдает распоряжение поисковым элементам искать временное окно около ожидаемого времени приема сигналов от подвижной станции, с которой установлена связь. Блок 518 принимает не более четырех наиболее сильных локальных максимумов. В этом примере, причем больше четырех наиболее сильных локальных максимумов не эффективен, так как доступны только четыре элемента демодуляции для присваивания, и ни в одном случае не может присваиваться элемент демодуляции пятому наиболее сильному лучу наблюдения. Блок 520 добавляет информацию каждого локального максимума, который превысит пороговый уровень минимального сигнала, списку лучей наблюдения. Блок 520 направляет процесс в другую часть данной системы через блок соединений 524.
Достигнув набора лучей наблюдения, данная система продолжается на фиг. 9B, которая грубо эквивалентна блоку 452 фиг. 8. Блок соединений 524 направляет процесс в блок 532. Блок 532 устанавливает рассматриваемый луч демодуляции одному из лучей, который был демодулирован в текущий момент элементом демодуляции. Блок 534 проверяет состояние блокировки/деблокировки элемента демодуляции в соответствии с рассматриваемым лучом демодуляции. Если элемент демодуляции незаблокирован, то контроллер может повторно присвоить элемент демодуляции или может обозначать элемент демодуляции "свободным", как указывается блоком 550. В этом случае не существует никаких правильных данных для спаривания с лучами наблюдения. Действие, относящееся к рассматриваемому лучу демодуляции, завершено.
Если элемент демодуляции, соответствующий рассматриваемому лучу демодуляции, заблокирован в текущее время, то блок 536 предпринимает попытку объединить сдвиг по времени этого луча демодуляции с аналогичной информацией в списке лучей наблюдения. Если существует луч наблюдения, соответствующий рассматриваемому лучу демодуляции, то блок 538 запрашивает, является ли рассматриваемый луч демодуляции первым лучом демодуляции для спаривания с конкретным лучом наблюдения. Если рассматриваемый луч демодуляции является первым, то действие, относящееся к рассматриваемому лучу демодуляции, завершено.
Если рассматриваемый луч демодуляции не является первым лучом демодуляции для спаривания с конкретным лучом наблюдения, то два элемента демодулируют, в сущности, один и тот же луч. Этот сценарий может иметь место в общем случае. Каждый элемент демодуляции направляет сигнал, которому он изначально был присвоен. Два многолучевых сигнала в течение времени могут слиться в один луч или почти в один луч. Блок 538 указывает на такую ситуацию. Если рассматриваемый луч демодуляции не является первым лучом демодуляции для спаривания с конкретным лучом наблюдения, то блок 540 определяет, который из лучей демодуляции имеет наибольший уровень сигнала. Если рассматриваемый элемент демодуляции имеет наиболее сильный уровень сигнала, то блок 542 повторно присваивает или помечает свободным предыдущий элемент демодуляции, спаренный с этим же лучом наблюдения. Если рассматриваемый элемент демодуляции слабее, чем предыдущий луч, то блок 544 повторно присваивает или помечает свободным элемент демодуляции, соответствующий рассматриваемому лучу демодуляции. Действие, относящееся к рассматриваемому лучу демодуляции, завершено.
Если существует луч демодуляции, который не был еще рассмотрен, то блок 546 направляет данную систему на блок 548. Блок 548 выбирает следующий рассматриваемый луч демодуляции и блок 534 начинает повторять данный процесс для следующего рассматриваемого луча демодуляции. Если рассматриваемый луч демодуляции является последним лучом демодуляции, который должен быть спарен, то блок 546 направляет процесс в следующую часть данной системы через блок соединений 554.
После достижения набора лучей наблюдения и спаривания лучей демодуляции с лучами наблюдения, данная система продолжается на фиг. 9C, которая грубо эквивалентна блоку 454 фиг. 8. Блок соединений 554 направляет процесс в блок 560. Блок 560 устанавливает рассматриваемый луч наблюдения для луча наблюдения с сигналом наиболее высокого уровня.
Блок 562 запрашивает, присвоен ли элемент демодуляции для демодуляции рассматриваемого луча наблюдения. Если это так, то действие, связанное с рассматриваемым лучом наблюдения, завершено. Если рассматриваемому лучу наблюдения не был присвоен элемент демодуляции, то процесс переходит к блоку 564. Блок 564 запрашивает, существует ли неприсвоенный или свободный элемент демодуляции. Если существует неприсвоенный или свободный элемент демодуляции, то блок 572 присваивает неприсвоенный или свободный элемент демодуляции рассматриваемому лучу наблюдения и действие, относящееся к рассматриваемому лучу наблюдения, завершается.
Процесс фиг. 9C продолжается от блока 562 и от блока 572 к блоку 574. Блок 574 запрашивает, существует ли оставшийся луч наблюдения. Если существует оставшийся луч наблюдения, то блок 570 выбирает следующий наиболее сильный луч наблюдения, в качестве рассматриваемого луча наблюдения и процесс продолжается через блок 562. Если не существует дополнительного луча наблюдения, то это означает, что количество элементов демодуляции превышает или равно найденному количеству лучей наблюдения, процесс продолжается через блок соединений 580 к фиг. 9A и данный цикл начинается вновь. Напротив, если лучей наблюдения больше, чем элементов наблюдения, то процесс продолжает перебирать лучи наблюдения, пока не будет обнаружен неприсвоенный или свободный элемент. Начиная с блока 564, процесс продолжается через блок соединений 578 на фиг. 9D.
Данная система продолжается на фиг. 9D, которая грубо эквивалентна блоку 456 фиг. 8. Блок соединений 578 направляет процесс к блоку 590 от фиг. 9C. Рассматриваемый луч наблюдения на фиг. 9C, после достижения блока соединений 578 все еще остается рассматриваемым лучом наблюдения после начала фиг. 9D.
Блок 590 выбирает наиболее слабый луч демодуляции для сравнения с рассматриваемым лучом наблюдения. Блок 592 запрашивает, является ли уровень сигнала сравниваемого луча демодуляции более, чем на 3 Дб слабее, чем уровень сигнала рассматриваемого луча наблюдения. Разность в 3 Дб является окном гистерезиса для предотвращения чрезмерных повторных присвоений между двумя одинаково выгодными лучами. Может использоваться более или менее широкое окно гистерезиса, в зависимости от запроса системы. Если уровень сигнала луча наблюдения не является, по крайнее мере, на 3 Дб
больше, чем у сравниваемого луча демодуляции, то цикл продолжается, согласно указанию блока соединений 580. Если уровень сигнала луча наблюдения, по крайней мере, на 3 Дб больше, чем у сравниваемого луча демодуляции, то соответствующий сравниваемому лучу демодуляции элемент демодуляции повторно присваивается рассматриваемому лучу наблюдения, согласно указанию блока 594. Так как это повторное присваивание является первым для данного цикла, то процесс продолжается от блока 576. Если блок 596 достигнут в следующий момент времени, то максимальное количество повторных присваиваний для этого цикла уже выполнено и цикл начинается вновь с фиг. 9A согласно указанию блока соединений 580.
Блок 576 запрашивает, существует ли еще луч наблюдения. Если существует еще луч наблюдения, то блок 564 устанавливает луч наблюдения со следующим, наиболее высоким уровнем сигнала в качестве рассматриваемого луча наблюдения. Блок 586 запрашивает, присвоен ли элемент демодуляции рассматриваемому лучу наблюдения. Данный процесс продолжается, соответственно, блоком 590 или блоком 576. Если рассматриваемый луч наблюдения является последним лучом наблюдения, который должен быть рассмотрен, то процесс продолжается через блок соединений 580, начиная новый цикл на фиг. 9A.
Фиг. 10A и 10B иллюстрируют примерный формат для просмотра компонент входного сигнала единичной подвижной станции. Вообще, достаточно большое количество сигналов присутствует в каждую антенну совокупности подвижных станций в и около системы. На фиг. 10A и 10B показан только сигнал от единичной подвижной станции, с которой установлена связь. На фиг. 10A показано изменение мощности сигнала во времени той же самой подвижной станции, принятого в первом секторе базовой станции. На фиг. 10B показано изменение мощности сигнала во времени для той же подвижной станции, принятого во втором секторе базовой станции. На фиг. 10A и 10B горизонтальные оси имеют размерность времени, а вертикальные оси имеют размерность энергии в Дб. На фиг. 10A четыре луча имеют уровень выше, чем предельный уровень шума, и обозначены как лучи 462, 464, 466 и 468. Луч 462 достигается первым во времени и может рассматриваться как наиболее короткий луч, достижимый от подвижной станции к базовой станции. Лучи 464, 466 и 468 следуют последовательно во времени и являются многолучевыми сигналами одного и того же сигнала как луч 462. Линия 460 представляет пороговое значение, ниже которого мощность сигнала не обеспечивает надежную передачу данных.
Сдвиг по времени между сектором фиг. 10A и сектором фиг. 10B явно не показан. Фиг. 10B может рассматриваться как нормализованная относительно задержки фиг. 10A для иллюстрации. На фиг. 10B шесть лучей имеют уровень выше уровня шума и помечены как лучи 470, 472, 474, 478 и 480. Линия 460 вновь представляет пороговое значение, ниже которого мощность сигнала не обеспечивает надежную передачу данных.
В качестве примера предположим, что система на фиг. 9A - 9D действует на основе сигналов, показанных на фиг. 10A и 10B. Допустим, что четыре элемента области присвоены следующим образом (табл. 11), где данный сектор соответствует номерам фигур на фиг. 10A и 10B. Процесс начинается на фиг. 9A. Список наблюдения очищен и поисковые элементы присвоены соответствующему сектору и отдано распоряжение искать временное окно (блоки 510-516). Данные поиска принимаются от каждого поискового элемента и четыре наиболее сильных локальных максимума записываются в убывающем порядке мощностей сигналов следующим образом (блоки 520 и 524) (табл. 12).
Фиг. 9B начинается установкой луча элемента демодуляции 1 в качестве первого рассматриваемого луча. Так как элемент демодуляции 1 заблокирован, то делается попытка спаривания луча демодуляции с лучом наблюдения (блок 534-536). Предположим в этом примере, что t1 приблизительно равно времени поступления луча 466 фиг. 10A, который имеет относительно низкую мощность сигнала и, таким образом, не имеет соответствующего входа в списке лучей наблюдения. Данный процесс продолжается для следующего луча демодуляции (блоки 546).
Луч демодуляции 2 устанавливается в качестве рассматриваемого луча (блок 548). Так как луч демодуляции 2 заблокирован, то делается попытка объединить луч демодуляции с лучом наблюдения (блок 534 - 536). Предположим, что в этом примере t2 приблизительно равно времени поступления луча 468 фиг. 10A, который имеет сравнительно малую мощность сигнала и, таким образом, не имеет соответствующего входа в списке лучей наблюдения. Процесс продолжается для следующего луча демодуляции (блоки 546).
Луч демодуляции 3 устанавливается в качестве рассматриваемого луча демодуляции (блок 548). Так как луч демодуляции 3 заблокирован, то делается попытка объединить луч демодуляции с лучом наблюдения (блок 534 - 536). Предположим, в этом примере, что t3 соответствует t10 луча 470. Так как луч демодуляции 3 является первым лучом демодуляции, спаренным с лучом наблюдения 470, то данный процесс продолжается для следующего луча демодуляции (блоки 538 - 546).
Луч демодуляции 4 устанавливается в качестве рассматриваемого луча демодуляции (блок 548). Так как луч демодуляции 4 заблокирован, то делается попытка объединить луч демодуляции с лучом наблюдения (блок 534 - 536). Предположим, что в этом примере t4 приблизительно равно времени поступления луча 480 фиг. 10A, который имеет относительно низкую мощность сигнала и, таким образом, не имеет соответствующего входа в списке лучей наблюдения. Так как луч демодуляции и является последним лучом демодуляции, то функции фиг. 5B завершены и мы переходим к фиг. 5C со следующим списком лучей наблюдения (табл. 13).
В предположении, что A10 является сигналом с наиболее сильным уровнем, фиг. 9C начинается установкой луча наблюдения 470 в качестве рассматриваемого луча наблюдения (блок 560). В этом случае элемент демодуляции 3 присваивается лучу наблюдения 470 (блок 562). Поэтому, луч наблюдения 476 устанавливается в качестве следующего рассматриваемого луча наблюдения (блоки 574 и 470). Так как ни один элемент демодуляции не присвоен лучу наблюдения 476 и не существует ни одного свободного или не присвоенного элемента демодуляции, то процесс продолжается на фиг. 5D (блоки 562, 564 и 478).
Луч демодуляции 1 (соответствующий лучу 466 фиг. 10A) установлен в качестве рассматриваемого луча демодуляции, так как он наиболее слабый луч демодуляции (блок 590). В предположении, что A11 больше чем A1 более, чем на 3 Дб, элемент демодуляции 1 повторно присваивается лучу наблюдения 476 (блоки 592 и 594). Это повторное присваивание является первым повторным присваиванием этого цикла поиска и, следовательно, луч наблюдения 472, которому не присвоен ни один элемент демодуляции, устанавливается в качестве следующего рассматриваемого луча наблюдения (блоки 596, 576, 564 и 586).
Луч демодуляции 2 (соответствующий лучу 468 фиг. 10A) устанавливается в качестве рассматриваемого луча демодуляции, так как он теперь наиболее слабый луч демодуляции (блок 590). В предположении, что A12 больше чем A2 более, чем на 3 Дб, элемент демодуляции 2 повторно присваивается лучу наблюдения 472 (блоки 592 и 594). Это повторное присваивание является вторым повторным присваиванием этого цикла, так что процесс продолжается на фиг. 9A, начиная другой цикл. Список присвоенных элементов демодуляции имеет следующий вид (табл. 14).
Необходимо отметить тот интересный факт в приведенных выше результатах примера присваивания базовой станции, что все элементы демодуляции присвоены одному и тому же сектору, даже если сквозная связь осуществляется через более чем один сектор. Этот результат резко отличается от результата, который мог бы быть получен от способа присваивания подвижной станции, где жестко фиксируется разнесенность сектора. Интересно также отметить, что четверка элементов демодуляции не присваивалась четырем наиболее мощным лучам, как указано на фигуре 10B. Элемент демодуляции 4 присваивается лучу 480, который является шестым, наиболее мощным лучом из сектора 10B. Однако, в вышеприведенном примере максимальное количество повторных присваиваний за цикл достигается до сравнения этого элемента демодуляции с лучом наблюдения для возможного повторного присваивания. Необходимо учитывать, что вышеприведенный способ в равной степени применим и к базовой станции, имеющей только один сектор.
Существует много разных вариаций исполнения этого изобретения. Предварительное описание предпочтительного исполнения предназначено для того, чтобы позволить любому, знающему данную область человеку, исполнить или использовать данное изобретение. Различные модификации этих изобретений с готовностью выявляются для тех, кто знает данную область, и отмеченные здесь основные принципы могут применяться к другим исполнениям без привлечения изобретательского факультета. Таким образом, данное изобретение не ограничивается рамками исполнения, показанного здесь, но должно соответствовать, в широких пределах и наиболее точно, представленным здесь принципам и новым свойствам.
Перевод надписей на чертежах
Подписи к фиг.1
1 - Поисковый элемент
2 - Элемент демодуляции
3 - Контроллер
4 - Запоминающее устройство
5 - Объединитель символов
Подписи и фиг. 2
1 - QPSK устройство компенсации расширения
2 - Генератор PN последовательностей пилот-сигналов
3 - Временной сдвиг
4 - Генератор последовательностей Уолша
5 - Фильтр
6 - Накапливающий регистр
7 - Суммирование I и Q
3 - Отслеживание времени
9 - Время луча демодуляции
10 - Указатель блокировки
11 - Векторное произведение
12 - Масштабирование данных
Последовательность фаз
13 - Указатель луча демодуляции RSSI
14 - Блокировка/разблокировка
15 - Оценка погрешности частоты
16 - Регистр хранения типа первым пришел - первым обслужен
17 - Вывод данных
Подписи к фиг. 4
1 - Провести наблюдение силы пилот-сигналов и временных сдвигов для каждой базовой станции и сектора базовой станции в активном наборе для создания набора лучей наблюдения
2 - Согласовать лучи наблюдения и лучи демодуляции
3 - Присвоить элементы демодуляции для содействия разнесения
4 - Имеются ли какие-либо повторно присвоенные элементы демодуляции?
5 - Да
6 - Нет
7 - Присвоить элементы демодуляции для силы сигнала
Подписи к фиг. 5A
1 - Начать
2 - Очистить перечень лучей наблюдения
3 - Пусть S = первый сектор в активном наборе
4 - Передать поисковому элементу команду на поиски временного окна вокруг сектора S
5 - Найти три наиболее сильных локальных максимума
6 - Добавить каждый из трех максимумов, который сильнее порога, к лучам наблюдения
7 - Имеются ли еще секторы в активном наборе?
8 - Да
9 - S = следующий сектор в активном наборе
10 - Нет
Подписи к фиг. 5B
1 - D = первый луч элемента демодуляции
2 - D в состоянии блокировки?
3 - Нет
4 - Снять присвоение или маркировать D как "свободный"
5 - Да
6 - Содержит ли наблюдение луч, соответствующий D?
7 - Добавить луч наблюдения согласно луча демодуляции
8 - Это первый луч демодуляции, который согласуется с лучом наблюдения?
9 - Какой луч демодуляции сильнее?
10 - Луч демодуляции D
11 - Снять присвоение/маркировать как свободный предыдущий луч
12 - Предыдущий луч демодуляции
13 - Снять присвоение/маркировать D как свободный
14 - Имеются ли еще лучи демодуляции?
15 - D = следующий луч элемента демодуляции
Подписи к фиг.5C
1 - P = наиболее сильный луч наблюдения, S = сектор, содержащий этот луч
2 - Присвоены ли S какие-либо элементы демодуляции?
3 - Да
4 - Нет
5 - Имеется ли неприсвоенный или свободный элемент демодуляции?
6 - Присвоить лучу P неприсвоенный/свободный элемент демодуляции
7 - Имеются ли еще лучи наблюдения?
8 - P = следующий наиболее сильный луч наблюдения, S = сектор, содержащий этот луч
9 - Присвоены ли несколько элементов демодуляции какому-либо одному сектору?
10 - Имеется ли луч демодуляции, по меньшей мере, на 3 дБ слабее луча P?
11 - Повторно присвоить такой наиболее слабый элемент демодуляция лучу P
Подписи к фиг. 5D
1 - P = наиболее сильный луч наблюдения, S = сектор, содержащий этот луч
2 - Присвоены ли P какие-либо элементы демодуляции?
3 - Да
4 - Имеются ли еще лучи наблюдения?
5 - P = следующий наиболее сильный луч наблюдения, S - сектор, содержащий этот луч
6 - Нет
7 - Неприсвоенный или свободный элемент демодуляции?
8 - Присвоить P неприсвоенный/свободный элемент демодуляции
9 - DP = наиболее слабый луч демодуляции
10 - Соответствует ли DP сектору S?
11 - Является ли DP единственным лучом демодуляции из своего сектора?
12 - Слабее ли (DP + 3 ДБ), чем P?
13 - Повторно присвоить элемент демодуляции, соответствующий DP, лучу P
14 - Имеются ли еще лучи демодуляции?
15 - DP = Следующий наиболее слабый луч демодуляции
Подписи к фиг.6
1 - РЧ обработка и цифровое преобразование
2 - Порт интерфейса
3 - Поисковый элемент
4 - Элемент демодуляции
5 - Контроллер
6 - Запоминающее устройство
7 - Объединитель символов
Подписи к фиг.7
1 - Устройство разрежения и устройство компенсации расширения
2 - Накапливающий регистр
3 - Быстрое преобразование Адамара и устройство выбора
4 - Генерирование ранних и поздних метрик
5 - Устройство компенсации временного сдвига
6 - Накапливающий регистр энергии и детектор блокировки
7 - Блокировка/отсутствие блокировки
8 - Сила сигнала
9 - Выход данных
10 - Отслеживание времени
11 - Время луча демодуляции
Подписи к фиг. 8
1 - Провести наблюдение зависимости силы сигнала подвижной станции от временного смещения каждого сектора, через который установлена активная связь, для создания набора лучей наблюдения
2 - Согласовать лучи наблюдения и лучи демодуляции
3 - Присвоить любые свободные или неблокированные элементы демодуляции для максимальной силы сигнала
4 - Повторно присвоить до фиксированного числа элементов демодуляции для максимальной силы сигнала
Подписи к фиг.9A
1 - Начать
2 - Очистить перечень лучей наблюдения
3 - Передать команду на поиски каждого поискового окна
4 - Принять до четырех локальных максимумов
5 - Добавить каждый максимум, который сильнее порога, к лучам наблюдения
Подписи к фиг.9B
1 - D = первый луч элемента демодуляции
2 - D блокирован?
3 - Нет
4 - Снять присвоение или маркировать D как "свободный"
5 - Да
6 - Содержит ли наблюдение луч, соответствующий D?
7 - Это первый луч демодуляции, который согласовывается с лучом наблюдения?
8 - Какой луч демодуляции сильнее?
9 - Луч демодуляции D
10 - Снять присвоение/маркировать как свободный предыдущий луч
11 - Предыдущий луч демодуляции
12 - Снять присвоение/маркировать как свободный D
13 - Имеются ли еще лучи демодуляции?
14 - D = следующий луч элемента демодуляции
Подписи к фиг. 9C
1 - P = наиболее сильный луч наблюдения
2 - Присвоен ли P элемент демодуляции?
3 - Да
4 - Имеются ли еще лучи наблюдения?
5 - P = следующий наиболее сильный луч наблюдения
6 - Нет
7 - Имеется ли неприсвоенный или свободный элемент демодуляции?
8 - Присвоить неприсвоенный/свободный элемент демодуляции лучу P
Подписи к фиг.9D
1 - Присвоены ли P какие-либо элементы демодуляции?
2 - Да
3 - Имеются ли еще лучи наблюдения?
4 - P = следующий наиболее сильный луч наблюдения
5 - Нет
6 - DP = наиболее слабый луч демодуляции
7 - (DP + 3 дБ) слабее, чем P?
8 - Повторно присвоить элемент демодуляции, соответствующий DP, лучу P
9 - Это первое повторное присвоение?
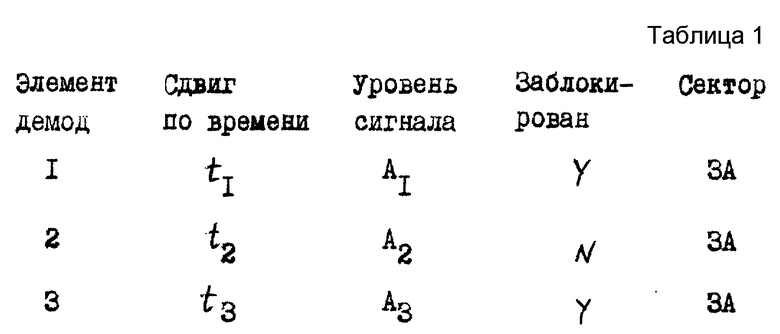
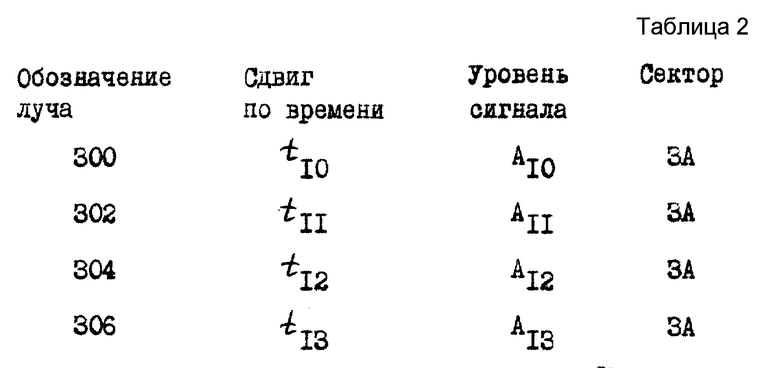
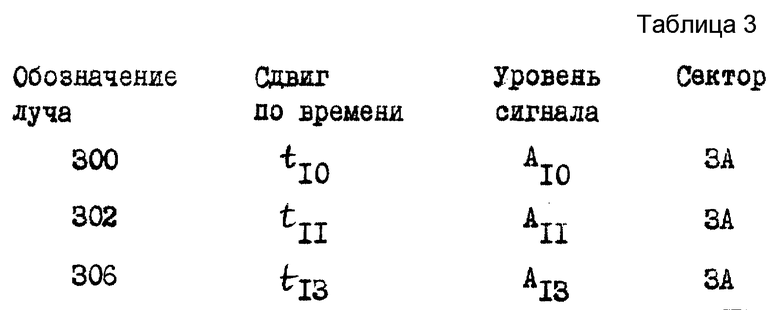
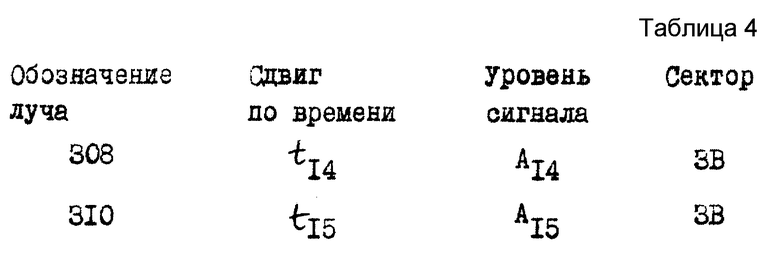
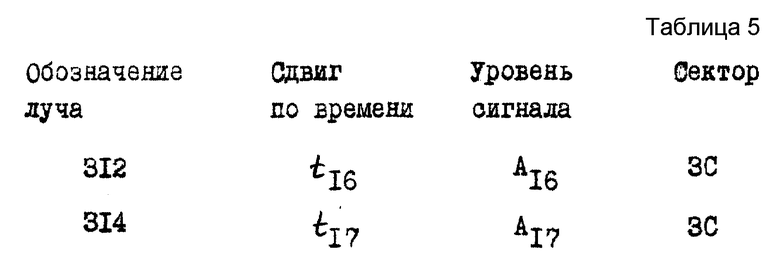
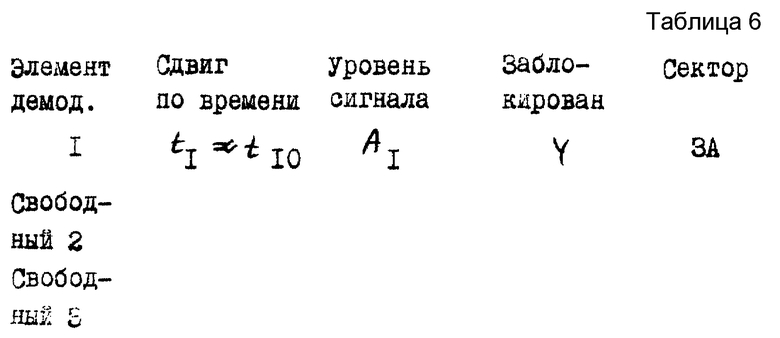
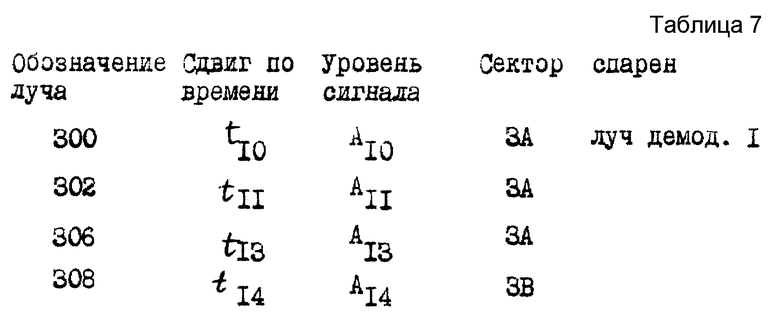
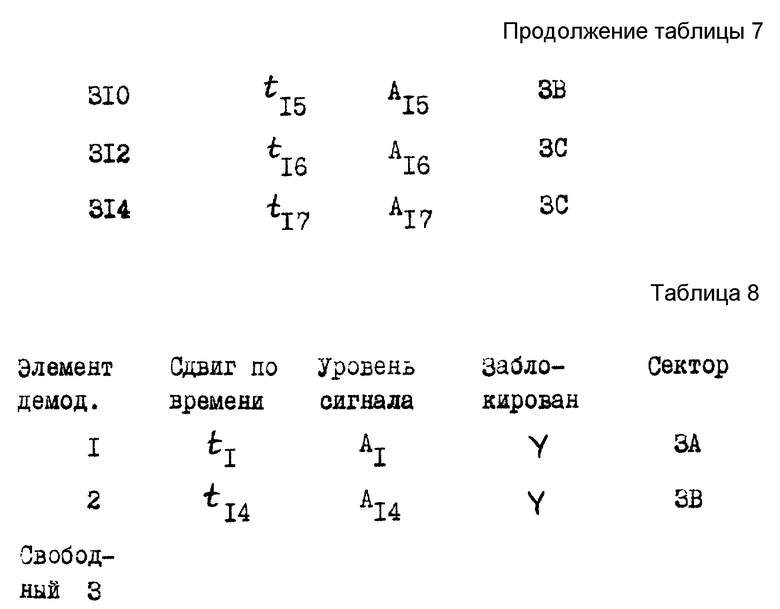
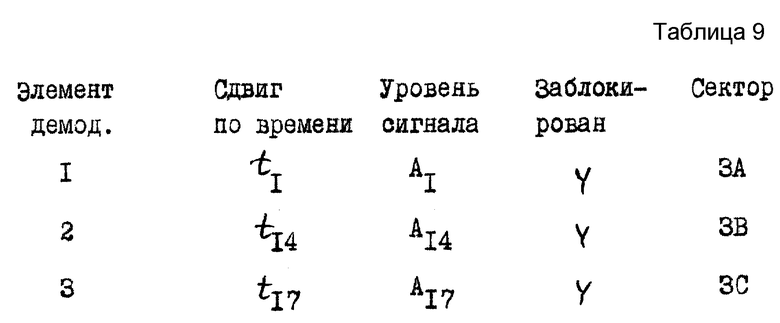
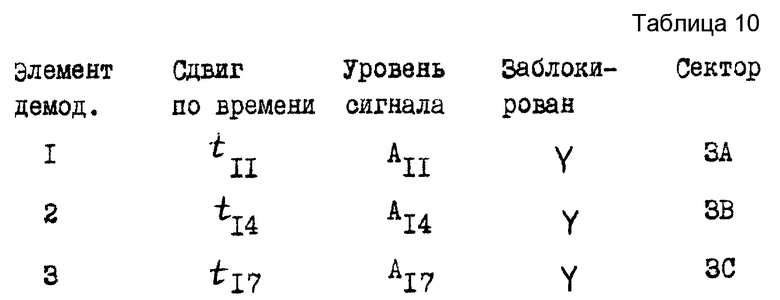
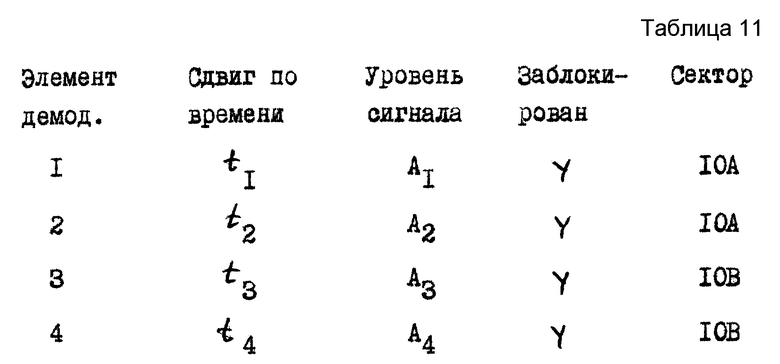
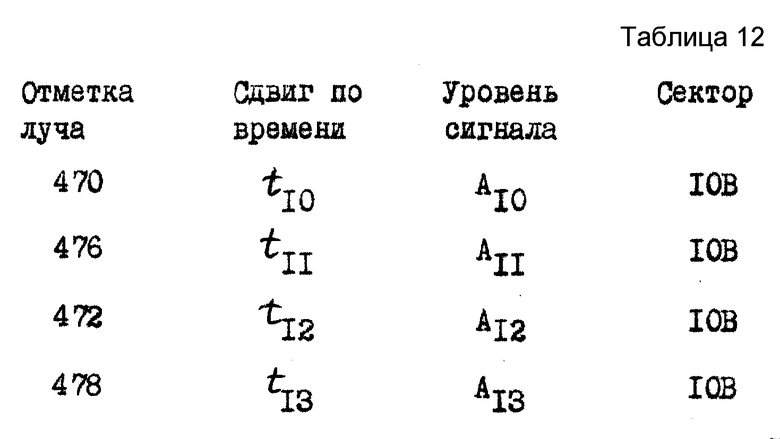
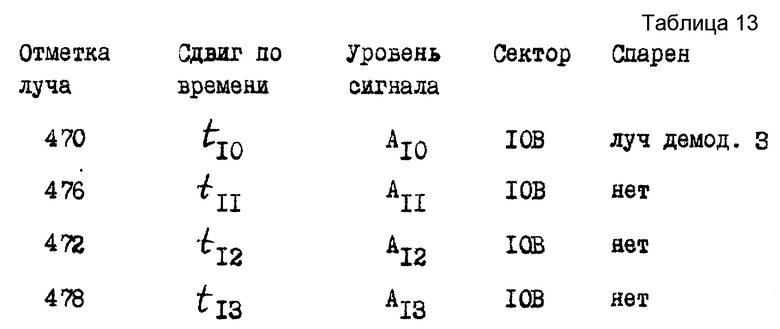
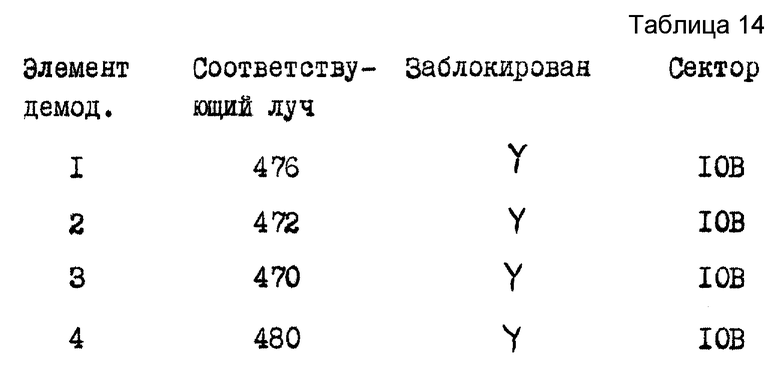
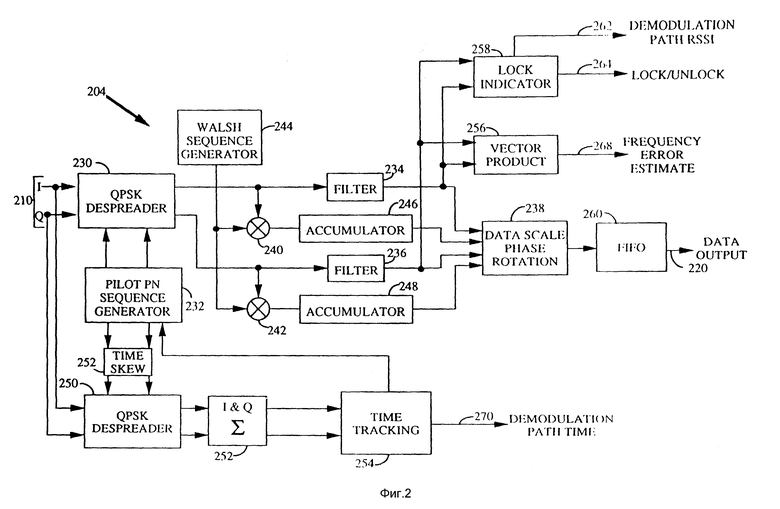
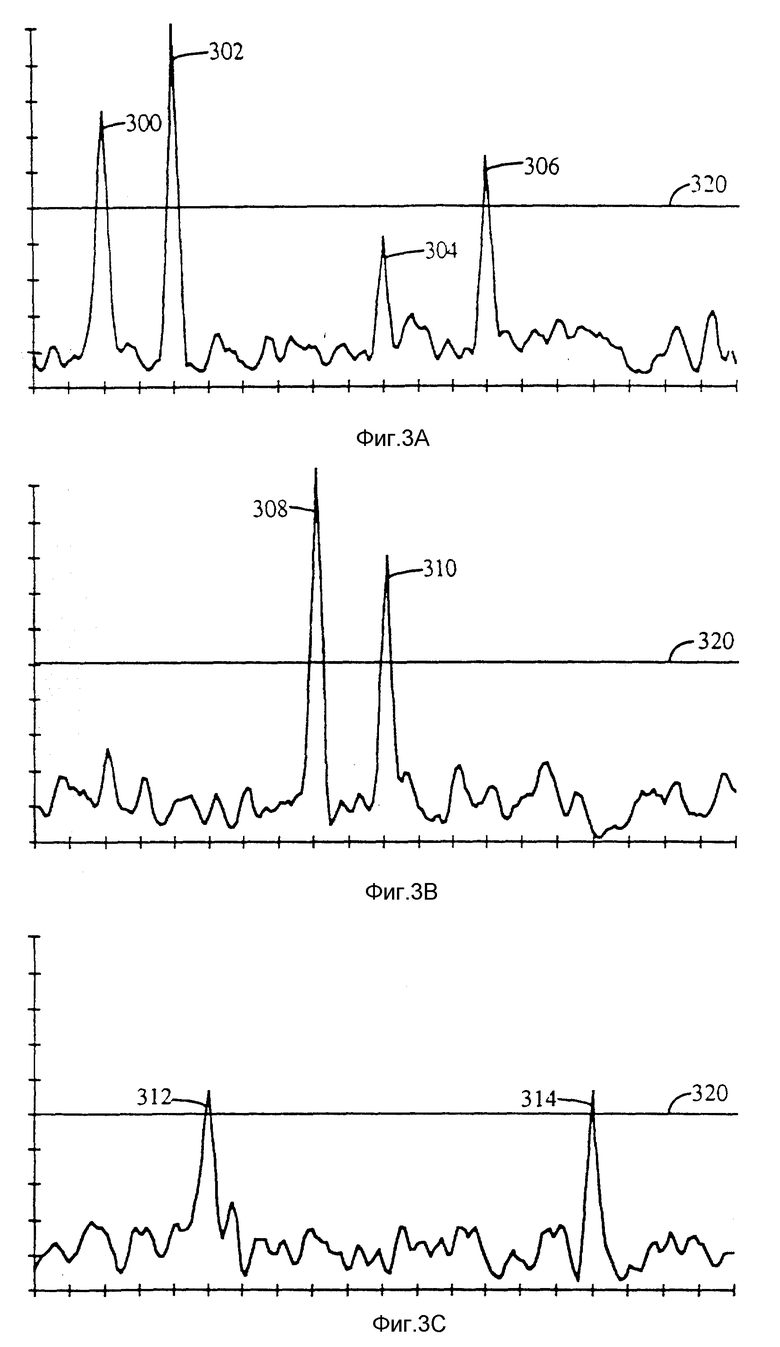
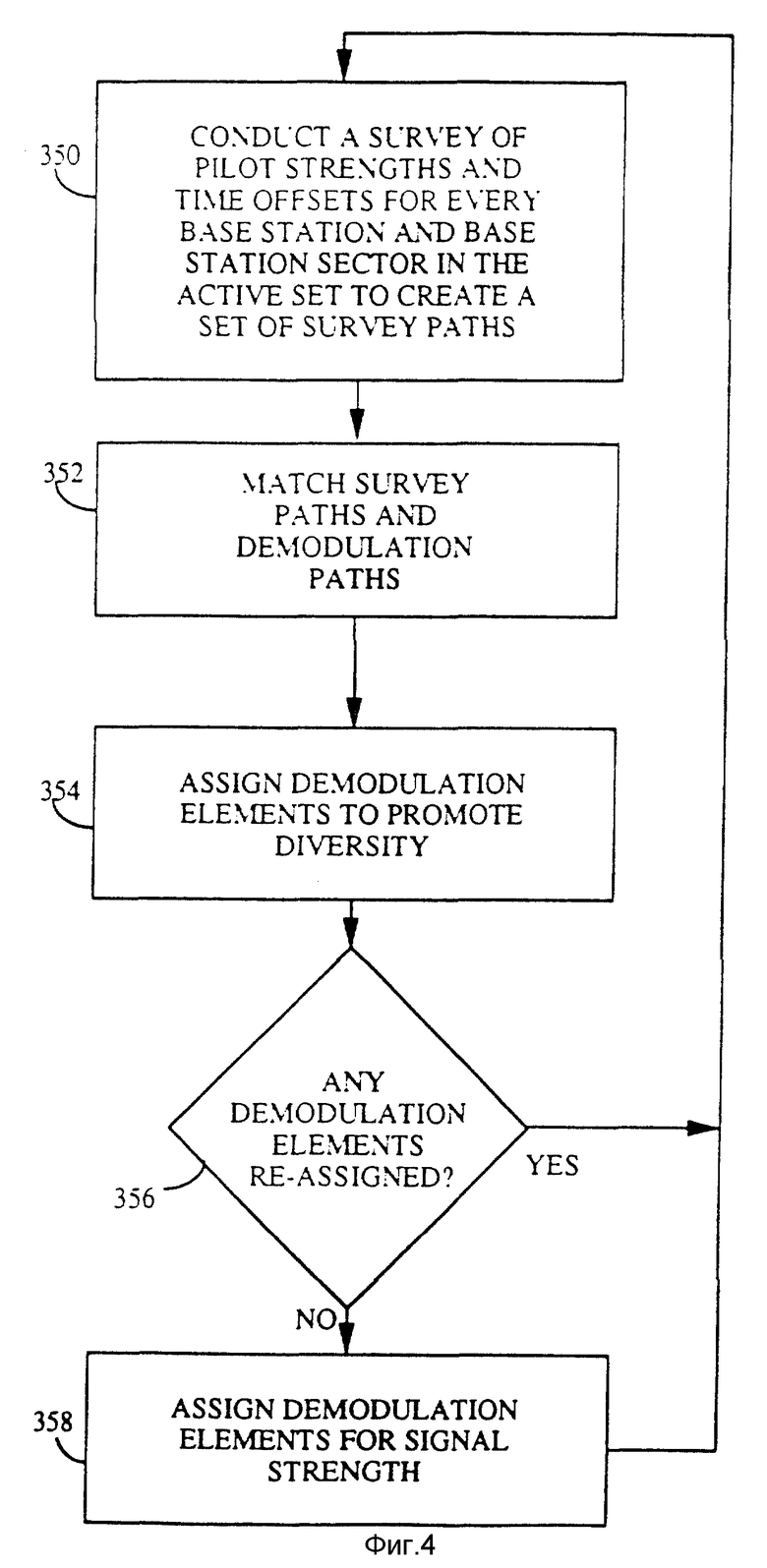
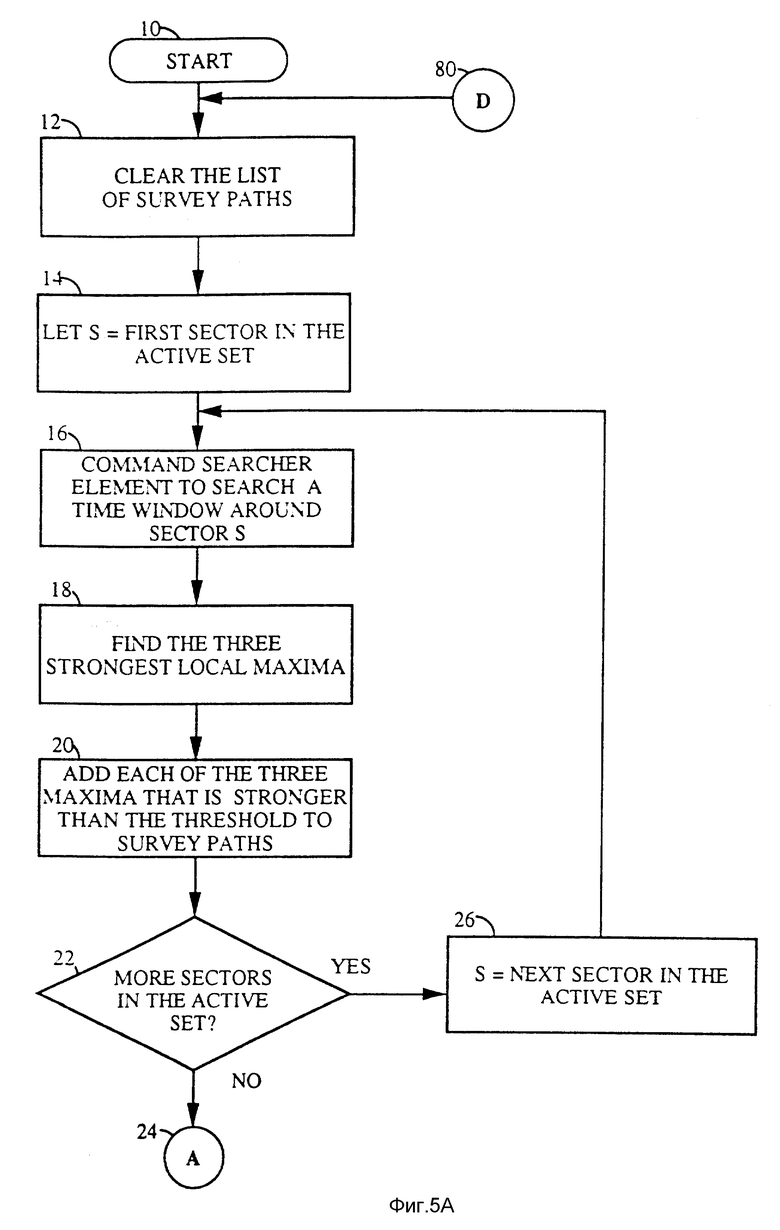
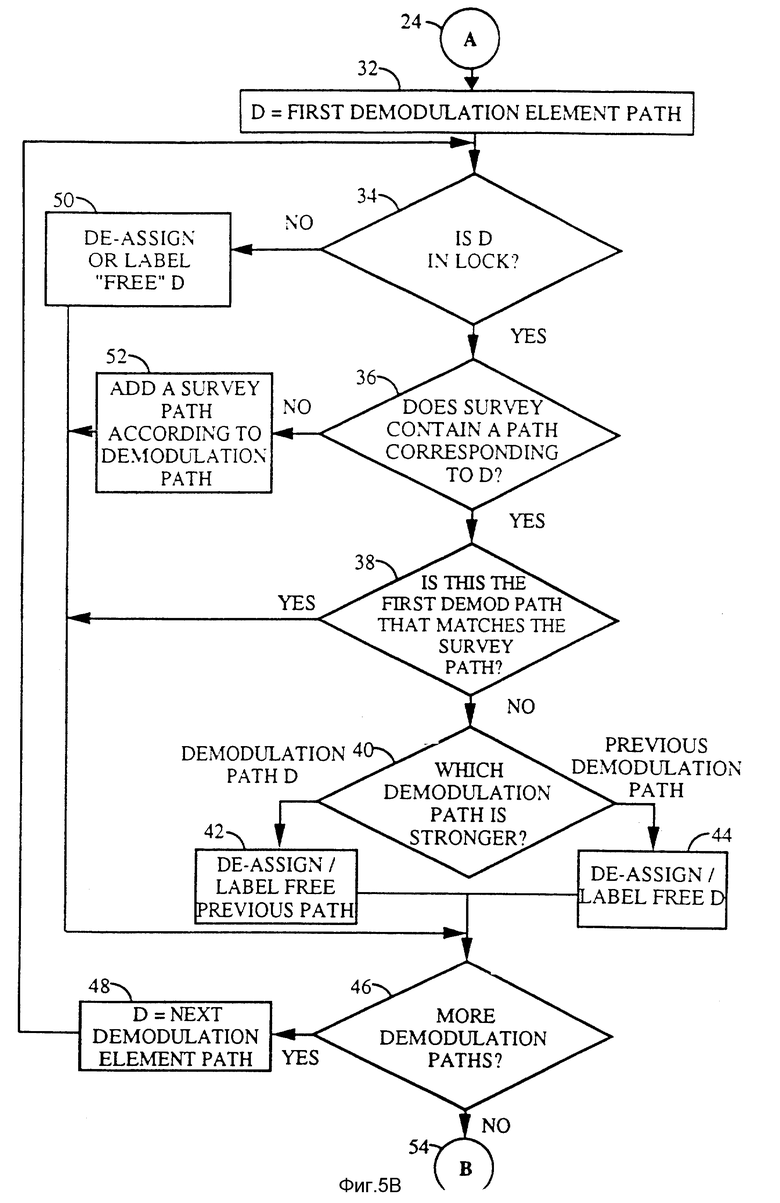
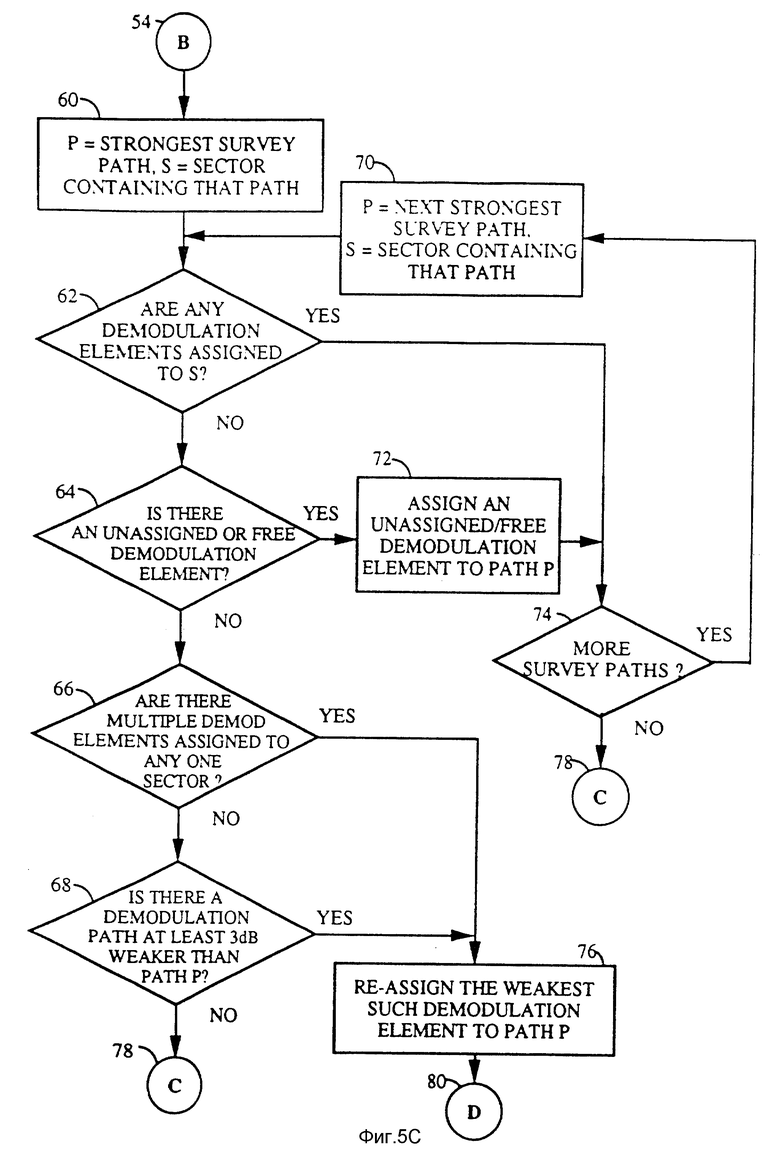
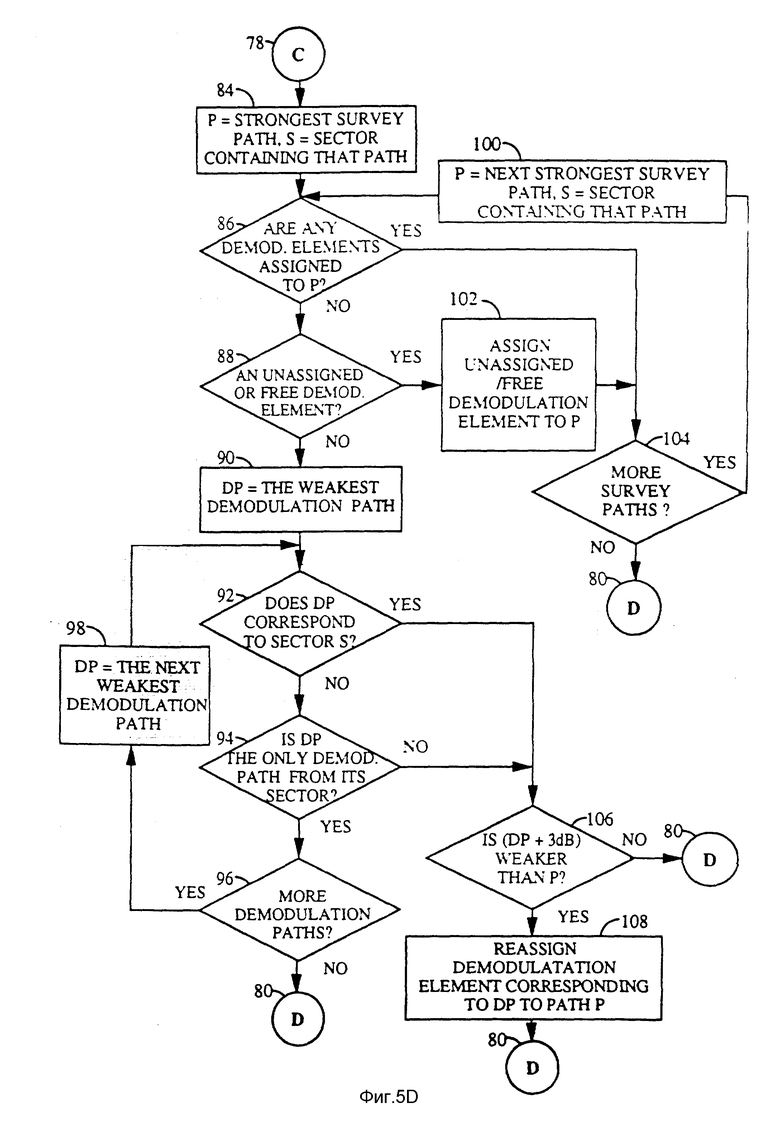
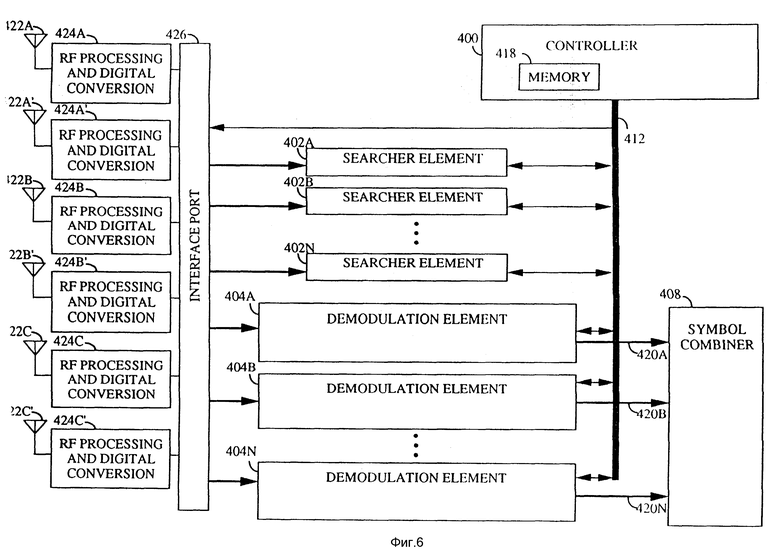
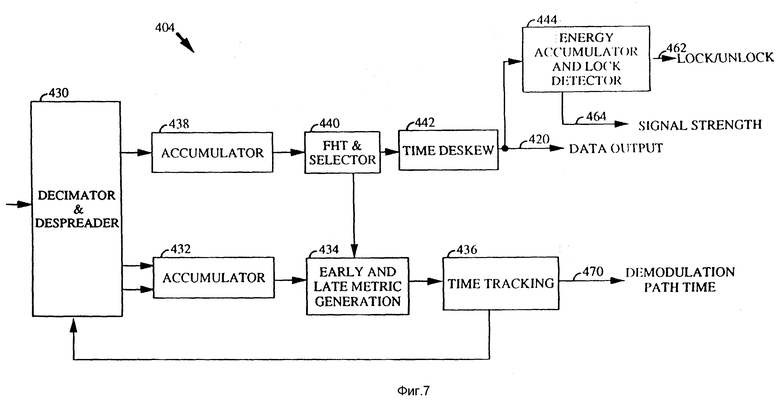
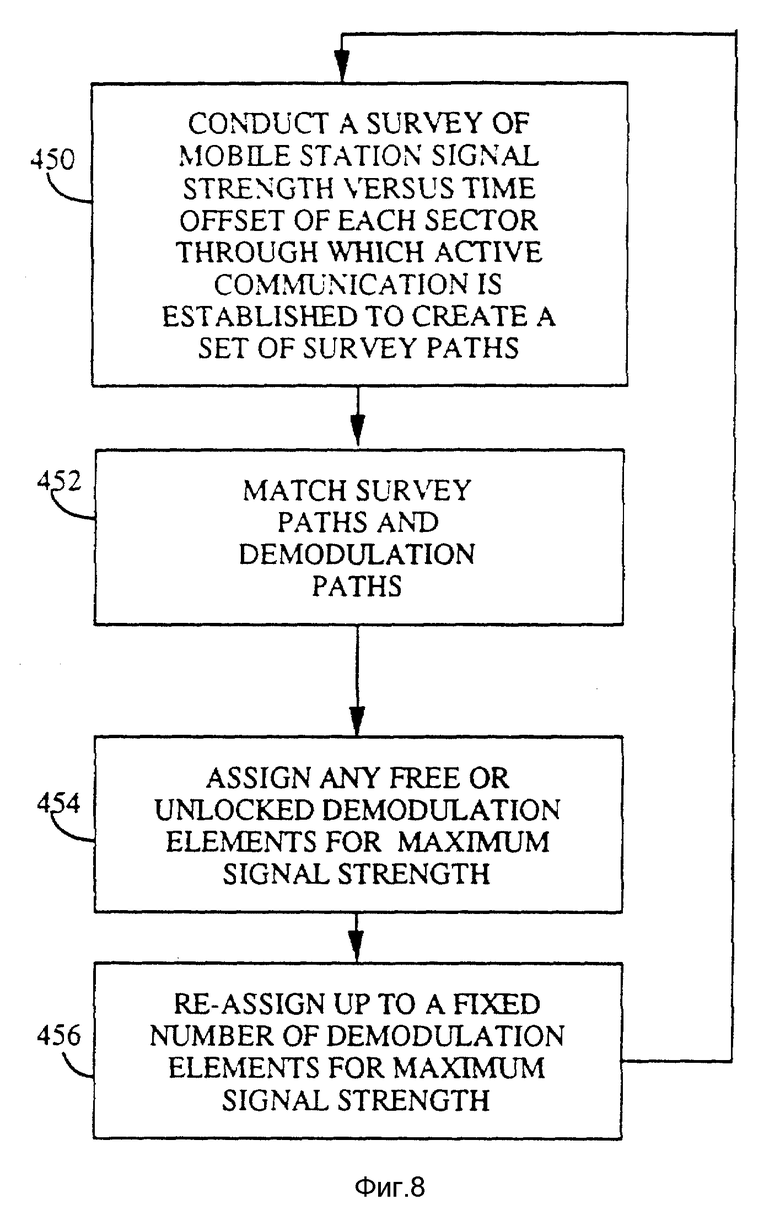
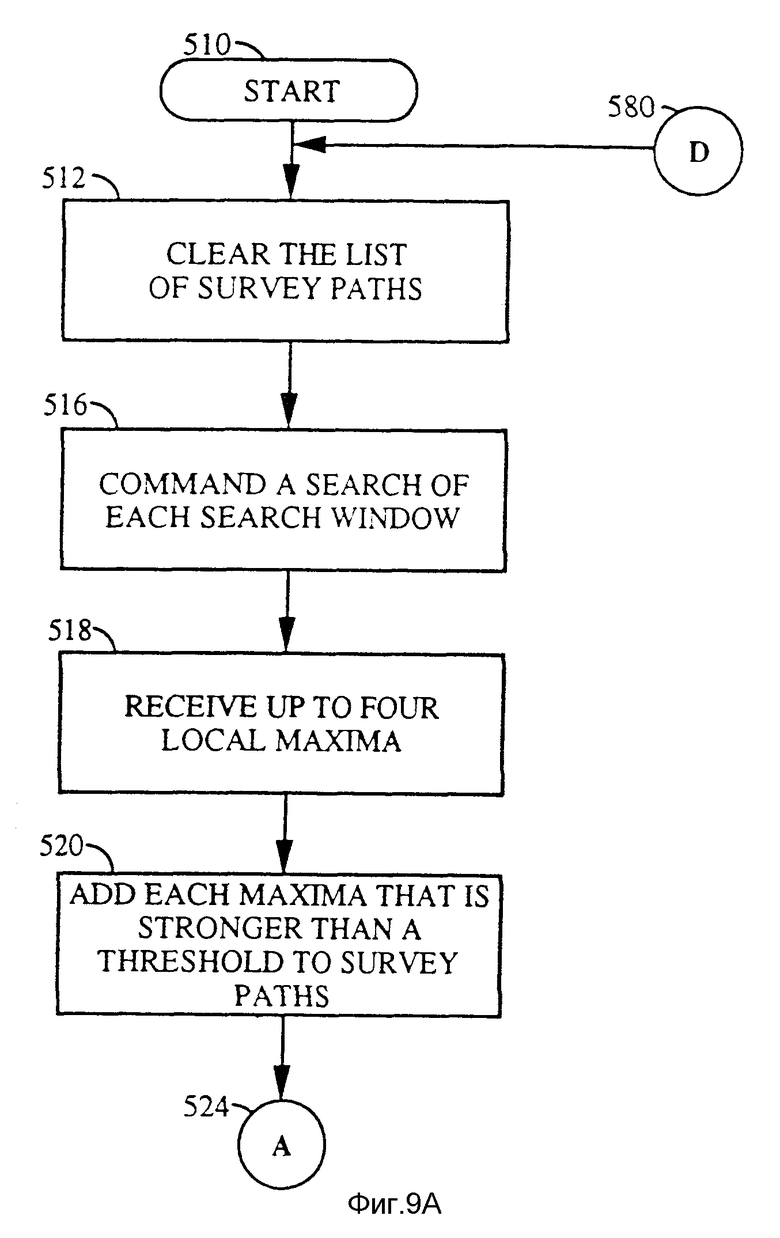
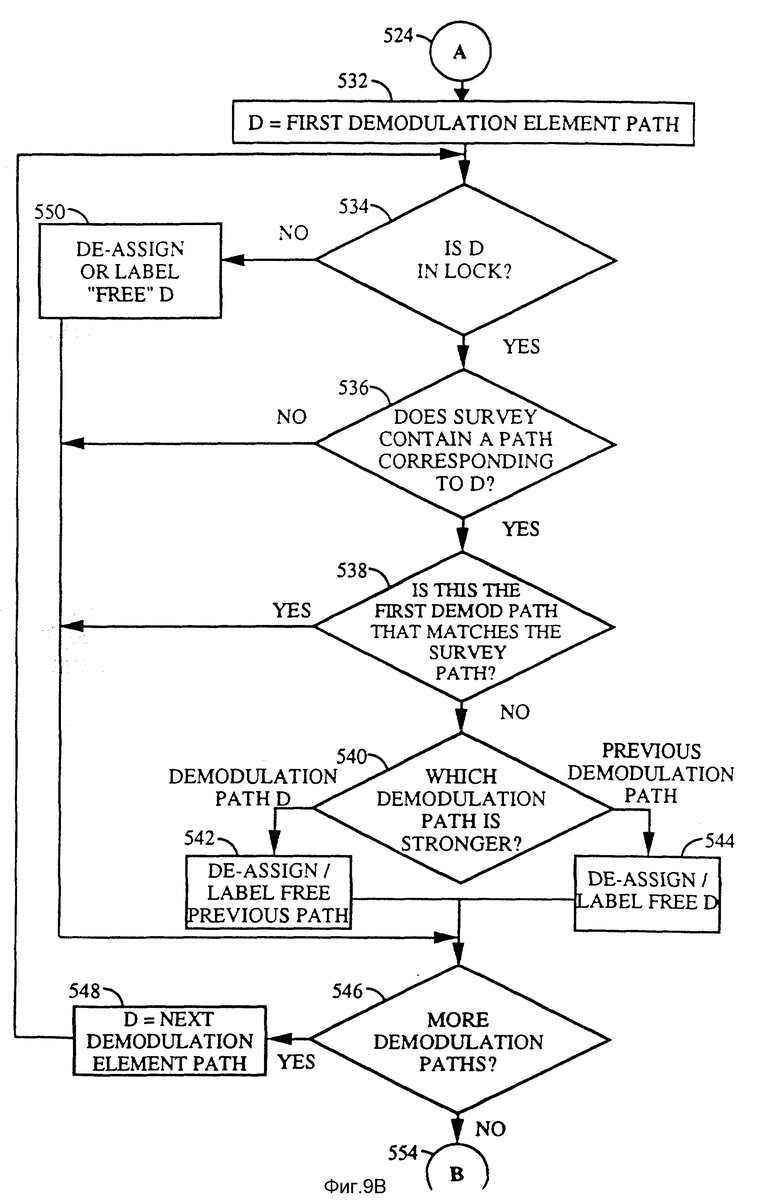
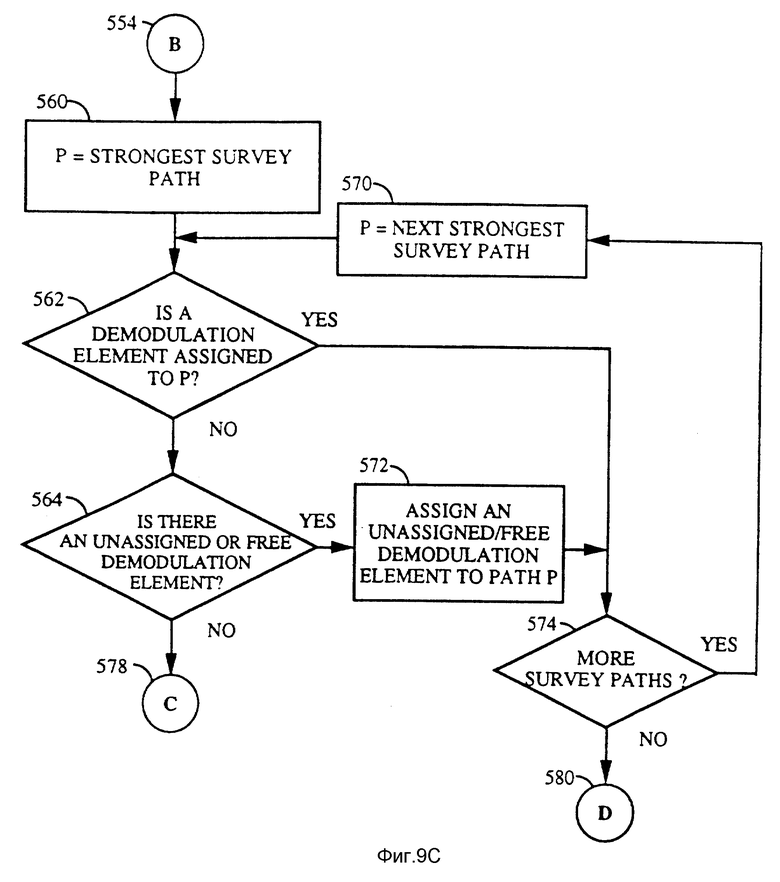
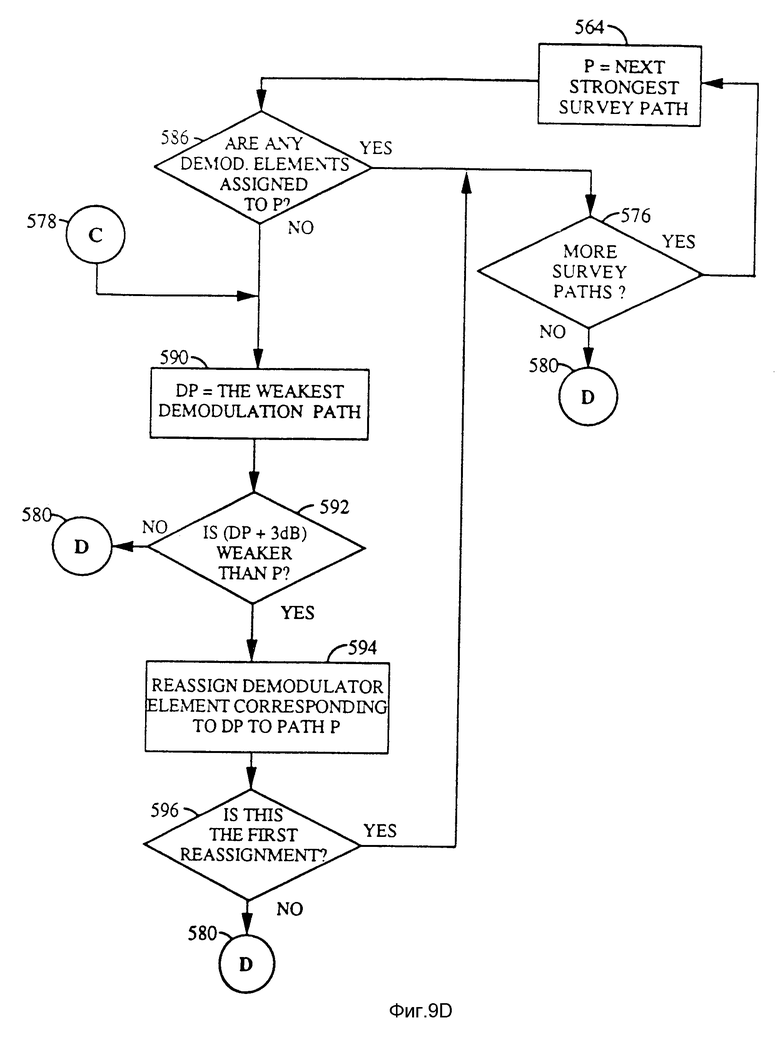
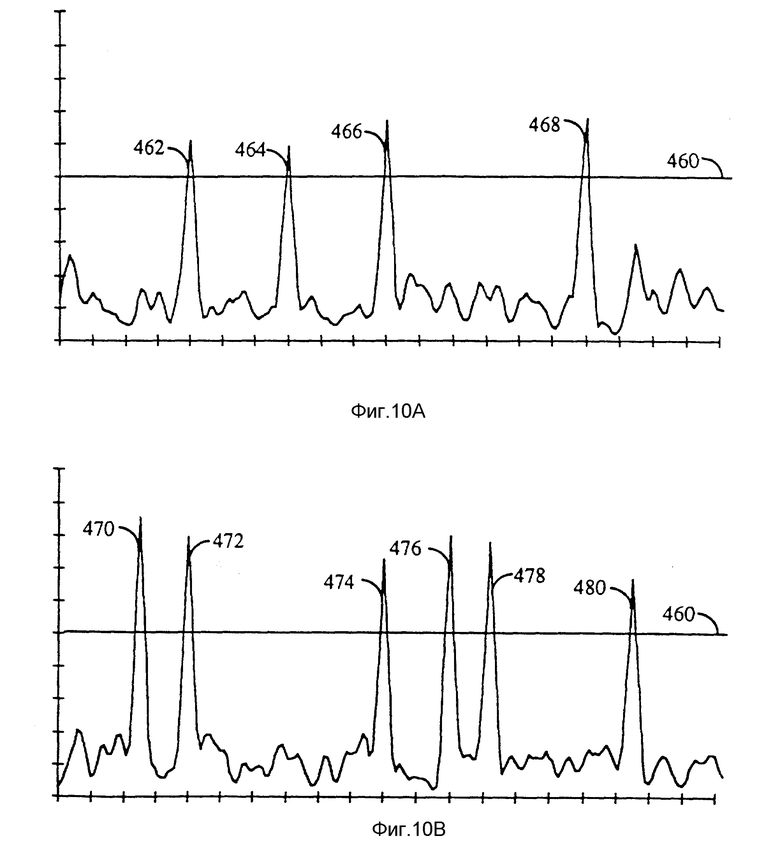
В изобретении на подвижной станции осуществляют наблюдение доступных сигналов и получают перечень лучей наблюдения, состоящий из показателей мощности пилот-сигнала, времени поступления и индекса передатчика. Полученная информация передается контроллеру, который согласует список лучей наблюдения со списком лучей демодуляции и присваивает неприсвоенный элемент демодуляции конкретному лучу наблюдения, имеющему индекс соответствующего передатчика, который отличается от других индексов передатчиков в списке лучей демодуляции. Технический результат заключается в сокращении количества повторных присвоений элементов демодуляции. 2 с. и 50 з.п. ф-лы, 19 ил., 14 табл.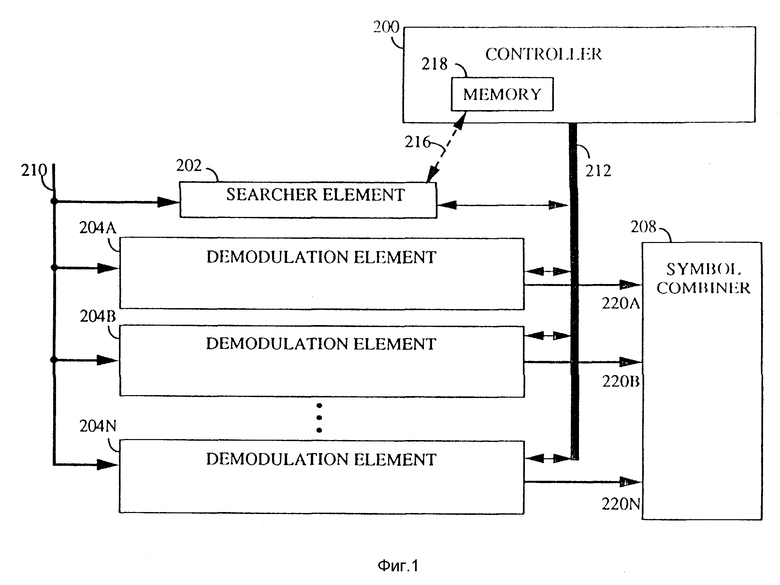
| US 5056109 A, 08.10.91 | |||
| US 5101501 A, 08.10.91 | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Системы радиосвязи./Под ред | |||
| Калашникова Н.И | |||
| - М.: Радио и связь, 1988, с.215-216. | |||

