Область техники
Настоящее изобретение относится к системам связи с расширенным спектром, более конкретно к обработке сигнала в сотовой телефонной системе связи.
Описание известного уровня техники
В радиотелефонных системах связи, таких как сотовые телефонные системы, системы персональной связи, и локальные замкнутые системы радиосвязи, многие пользователи осуществляют связь по радиоканалу для подсоединения к проводным телефонным системам. Связь по радиоканалу может быть одним из множества методов множественного доступа, обеспечивающих возможность большому числу абонентов использовать ограниченный частотный спектр. Эти методы множественного доступа включают множественный доступ с временным разделением /МДВР/ каналов, множественный доступ с частотным разделением /МДЧР/ и множественный доступ с кодовым разделением /МДКР/. Метод МДКР имеет множество преимуществ, причем типовая система с МДКР раскрыта в Патенте США N 4901307, от 13 февраля 1990 на "Систему связи множественного доступа с расширенным спектром, использующую спутниковые или наземные ретрансляторы", переуступленном правопреемнику настоящего изобретения.
В упомянутом патенте раскрыт способ множественного доступа, в котором большое количество мобильных пользователей телефонной системы, каждый из которых имеет приемопередатчик, осуществляют связь через спутниковые ретрансляторы или наземные базовые станции с использованием сигналов связи в режиме МДКР с расширенным спектром. При осуществлении связи в режиме МДКР частотный спектр может использоваться многократно, что позволяет увеличить пропускную способность системы для пользователей.
Способы модуляции МДКР, раскрытые в Патенте США N 4901307, имеют множество преимуществ по сравнению со способами узкополосной модуляции, применяемыми в системах связи, использующих спутниковые и наземные каналы. В наземных каналах возникают специфические требования к системе связи, в частности, по отношению к многолучевым сигналам. Применение способов МДКР позволяет решить специфические проблемы, связанные с использованием наземного канала, путем преодоления отрицательного влияния многолучевого распространения, например, замирания, не теряя в то же время их преимуществ.
Способ МДКР, раскрытый в Патенте США N 4901307, предусматривает использование когерентной модуляции и демодуляции для обоих направлений линии связи при осуществлении связи между удаленным устройством радиосвязи и спутником. В нем соответственно раскрывается использование несущего пилот-сигнала в качестве когерентного фазового опорного сигнала для линии связи "спутник-удаленное устройство радиосвязи" и линии связи "базовая станция-удаленное устройство радиосвязи". Однако в наземном оборудовании сотовой связи наличие весьма сильного многолучевого затухания, приводящего к искажению фазы каналом, а также уровень мощности, необходимый для передачи несущего пилот-сигнала от удаленного устройства радиосвязи, затрудняет использование способа когерентной модуляции для линии связи "удаленное устройство радиосвязи-базовая станция". В Патенте США N 5103549 на "Систему и способ формирования сигналов в сотовой телефонной системе МДКР" от 25 июня 1990 года, переуступленном правопреемнику настоящего изобретения, предлагается средство для преодоления отрицательного влияния многолучевого распространения в канале связи "удаленное устройство радиосвязи-базовая станция" с использованием способов некогерентной модуляции и демодуляции.
В сотовой телефонной системе с МДКР одна и та же полоса частот может быть использована для связи со всеми базовыми станциями. В приемнике базовой станции разделяемые сигналы многолучевого распространения, например, проступающие по трассе от абонентского пункта и по другой трассе после отражения от здания, могут быть объединены при обработке с разнесением для улучшения характеристик модема. Свойства сигналов МДКР, обеспечивающие выигрыш при обработке, также используются для различения сигналов, занимающих один и тот же частотный диапазон. Кроме того высокоскоростная псевдошумовая модуляция всегда обеспечивает возможность разделения различных трасс распространения одного и того же сигнала, при условии, если разница в задержках по трассам распространения превышает длительность элемента псевдошумового кода. Если в системе с МДКР используется частота следования элементов псевдошумового кода порядка 1 МГц, то выигрыш при обработке сигнала расширенного спектра, равный отношению расширенной полосы к частоте данных в системе, может быть получен для всех трасс распространения, имеющих задержки, отличающиеся более чем на одну микросекунду. Разница в задержках на трассе распространения в одну микросекунду соответствует разнице в расстояниях примерно 300 метров. Обычно городская среда обеспечивает разность задержек по трассам распространения сигналов, превышающую одну микросекунду.
Свойства наземного канала, связанные с многолучевым распространением, приводят к тому, что в приемник сигналы приходят по нескольким различным трассам распространения. Одной из характеристик канала с многолучевым распространением является разброс по времени, возникающий в сигнале, передаваемом через такой канал. Например, если по каналу с многолучевым распространением передается идеальный импульс, то принимаемый сигнал появляется в виде последовательности импульсов. Другой характерной особенностью канала с многолучевым распространением является то, что каждая трасса распространения сигнала может давать разный коэффициент затухания. Например, если по каналу с многолучевым распространением передается идеальный импульс, то каждый импульс принимаемой импульсной последовательности обычно имеет уровень, отличный от уровня других принимаемых импульсов. Еще одной характерной особенностью канала с многолучевым распространением является то, что каждая трасса распространения дает разную фазу сигнала. Например, если по каналу с многолучевым распространением передается идеальный импульс, то каждый импульс принимаемой последовательности обычно имеет фазу, отличающуюся от фазы других принимаемых импульсов.
При передаче по радиоканалу многолучевое распространение возникает благодаря отражению сигнала от препятствий, образуемых зданиями, деревьями, автомобилями и людьми. В общем случае радиоканал представляет собой нестационарный канал с многолучевым распространением из-за относительного перемещения объектов, создающих многолучевое распространение. Например, если по нестационарному каналу с многолучевым распространением передается идеальный импульс, то в принимаемой последовательности импульсов будет изменяться его положение во времени, затухание и фаза в функции времени передачи идеального импульса.
Многолучевое распространение может вызвать замирание сигнала в канале. Замирание является результатом характеристик фазирования канала с многолучевым распространением. Замирание появляется, когда векторы множества лучей суммируются неблагоприятным образом, образуя в результате принимаемый сигнал, меньший, чем любой отдельно взятый вектор. Например, если по каналу с многолучевым распространением передается гармонический сигнал, характеризуемый двумя трассами распространения, причем первая трасса имеет коэффициент ослабления X дБ, время задержки σ с фазовым сдвигом θ радиан, а вторая трасса имеет коэффициент ослабления X дБ, время задержки θ+π с фазовым сдвигом σ радиан, то на выходе канала принятый сигнал будет отсутствовать.
В системах узкополосной модуляции, таких как аналоговая частотная модуляция, используемая в известных радиотелефонных системах, наличие многолучевого распространения в радиоканале приводит к существенному многолучевому замиранию. Однако, как было отмечено выше в случае широкополосной системы МДКР, в процессе демодуляции могут быть выделены разные трассы распространения. Такое разделение не только значительно уменьшает отрицательное воздействие замирания, но и дает преимущества, связанные с использованием системы МДКР.
Разнесение - один из способов уменьшения отрицательных влияний замирания. Следовательно, желательно обеспечить некоторую форму разнесения, что позволит уменьшить замирание в системе. Существуют три основных вида разнесения: временное разнесение, частотное разнесение и пространственное разнесение или разнесение по трассе распространения.
Временное разнесение обеспечивается с использованием повторения временного перемежения и кодирования с обнаружением и исправлением ошибок, которое вводит избыточность. В системе, использующей настоящее изобретение, можно применять любой из этих способов в качестве формы временного разнесения.
МДКР с присущей данному методу широкополосностью обеспечивает некоторую форму частотного разнесения путем распределения энергии сигнала в широкой полосе рабочих частот. Поэтому частотно-избирательное замирание проявляется только на небольшой части полосы рабочих частот сигнала МДКР.
Пространственное разнесение и разнесение по трассе распространения обеспечивается посредством подачи сигнала с многолучевым распространением одновременно по нескольким линиям связи от удаленного устройства радиосвязи через две или более базовые станции и путем использования двух или более пространственно разнесенных антенных элементов на одной базовой станции. Кроме того разнесение по трассам распространения может быть получено путем использования среды многолучевого распространения посредством обработки расширенного спектра, что позволяет осуществлять прием и раздельную обработку сигнала, поступающего с различными задержками распространения, как было описано выше. Примеры разнесения по трассам распространения приведены в Патенте США N 5101501 на "Программируемое переключение связи в сотовой телефонной системе МДКР" от 21 марта 1992 года и Патенте США N 5109390 на "Приемник разнесенного приема в сотовой телефонной системе МДКР" от 8 октября 1991, переуступленных правопреемнику настоящего изобретения.
Отрицательное влияние замирания может быть до некоторой степени скомпенсировано в системе с МДКР посредством регулирования мощности передатчика. Система для управления мощностью базовой станции и удаленного модуля раскрыта в Патенте США N 5056109 на "Способ и устройство для управления передаваемой мощностью в сотовой мобильной телефонной системе МДКР" от 8 октября 1991 года, переуступленном правопреемнику настоящего изобретения.
Способ МДКР, раскрытый в Патенте США N 4901307, предусматривает использование относительно длинных псевдоожиженных последовательностей /ПШП/, причем пользователю каждого удаленного устройства радиосвязи выделяется своя, отличная от других ПШП. Взаимная корреляция между различными ПШП и автокорреляция ПШП для всех временных сдвигов, отличных от нуля, имеют среднее значение, близкое к нулю, что позволяет различать сигналы различных пользователей при приеме. (Для получения нулевого среднего значения для автокорреляции и взаимной корреляции, требуется, чтобы логический "0" принял значение "1", а логическая "1" приняла значение "-1" или на исходное отображение логических уровней).
Однако такие псевдошумовые сигналы не ортогональны. Хотя взаимная корреляция по существу имеет нулевое среднее значение на всей длине последовательности, однако в течение короткого временного интервала, такого как время информационного бита, взаимная корреляция является случайной переменной с биномиальным распределением. При этом сигналы взаимодействуют друг с другом в основном таким же образом, как если бы они представляли собой широкополосный шум с гауссовым распределением с той же самой спектральной плотностью мощности. Таким образом, сигналы других пользователей или шум от взаимных помех в конечном счете ограничивают достигаемую пропускную способность.
Специалистам хорошо известно, что можно сформировать набор из n ортогональных двоичных последовательностей, каждая длиной n, для n, являющегося любой степенью 2 (см. Digital Communications with Space Applications, S.W. Golomb et el. , Prentice-Hall, Inc., p.45-64). В принципе также известны наборы ортогональных бинарных последовательностей для большинства длин, которые кратны четырем и меньше двухсот. Один класс таких последовательностей, которые легко генерировать, называется функцией Уолша, известной так же, как матрица Адамара.
Функция Уолша n-го порядка может быть определена рекурcивно следующим образом:
где W' обозначает логическое дополнение W, a W(1)= |0|.
Таким образом,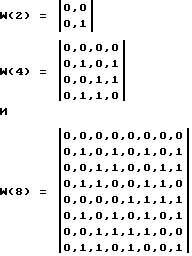
Одной из строк матрицы функции Уолша является символ, последовательность или код Уолша. Матрица функции Уолша n-го порядка содержит n последовательностей, каждая из которых имеет длину n элементов Уолша. Каждый код Уолша имеет соответствующий индекс Уолша, где индекс Уолша относится к числу /от 1 до n/, соответствующему строке, в которой находится код Уолша. Например, для приведенной выше матрицы функции Уолша с n=8 все нулевые строки соответствуют индексу Уолша 1, а код Уолша 0,0,0,0,1,1,1,1, соответствует индексу Уолша 5.
Матрица функции Уолша n-го порядка (а также все другие ортогональные функции длиной n) обладают свойством, состоящим в том, что на интервале n бит взаимная корреляция между всеми несхожими последовательностями внутри набора равна нулю. Это вытекает из того, что каждая последовательность отличается от любой другой последовательности ровно половиной своих бит. Следует также отметить, что всегда существует одна последовательность, содержащая все нули, и что все другие последовательности содержат половину единиц и половину нулей. Символ Уолша, который состоит из всех логических нулей вместо половины из нулей и половины из единиц, называется нулевым символом Уолша.
В канале обратной линии связи от удаленного устройства радиосвязи к базовой станции отсутствует пилот-сигнал, обеспечивающий привязку по фазе. Таким образом, имеется необходимость в способе, обеспечивающем высококачественную связь по каналу с замиранием, имеющему низкое отношение Eb/No/ отношение энергии на один бит к плотности мощности шума/. Модуляция функции Уолша в обратной линии связи является простым способом получения 64-ричной модуляции с когерентностью для набора из шести кодовых символов, отображенных в 64 кода Уолша. Характеристики наземного канала таковы, что частота изменения фазы относительно низка. Следовательно, путем выбора длины кода Уолша, короткого по сравнению с частотой изменения фазы в канале, возможна когерентная демодуляция на длине одного кода Уолша.
В канале обратной линии связи код Уолша определяется информацией, передаваемой из удаленного устройства радиосвязи. Например, трехбитовый информационный символ может быть отображен в приведенные выше восемь последовательностей W(8). "Обратное отображение" закодированных символов Уолша в оценку исходных информационных символов может быть выполнено в приемнике с помощью быстрого преобразования Адамара /БПА/ Предпочтительное "обратное отображение", или процесс селекции, дает "мягкое" /программируемое/решение, которое может быть передано в декодер для декодирования по критерию максимального правдоподобия.
Процедура БПА используется для выполнения процесса "обратного отображения". Процедура БПА коррелирует принятую последовательность с каждой из возможных последовательностей Уолша. Для выбора наиболее вероятного значения корреляции, которое масштабируется и принимается в качестве "мягкого" решения, используется схема селекции.
Приемник сигнала с расширенным спектром с разнесенным приемом или многоканальный приемник /"Rake" - приемник/ содержит множество приемников данных для смягчения эффекта замирания. Обычно каждый приемник данных предназначается для демодулирования сигнала, пришедшего по своей, отличной от других трассе распространения, либо с использованием многоэлементных антенн, либо с использованием свойств многолучевого распространения канала. При демодуляции сигналов, модулированных в соответствии со схемой передачи ортогональных сигналов, каждый приемник данных коррелирует принимаемый сигнал с каждым из возможных значений отображения, используя процедуру БПА, БПА каждого приемника данных объединяются, и затем схема селекции выбирает наиболее вероятное значение корреляции, основываясь на максимальном объединенном выходном сигнале БПА для получения демодулированного символа "мягкого" решения.
В системе, описанной в Патенте США N 5103459, сигнал вызова начинается в виде источника информации 9600 бит в секунду, который затем преобразуется кодером прямого исправления ошибок со скоростью 1/3 в выходной поток 28800 символов в секунду. Эти символы группируются по 6 для образования 4800 символов Уолша в секунду, причем каждый символ Уолша отбирает одну из шестидесяти четырех ортогональных функций Уолша длительностью по шестьдесят четыре элемента Уолша. Элементы Уолша модулируются с помощью генератора псевдошумовой последовательности, специфической для каждого пользователя. Затем данные, модулированные выделенной для каждого пользователя специфической псевдошумовой последовательностью, расщепляются на два сигнала, один из которых модулируется с помощью ПСП синфазного (I) канала, а другой модулируется с помощью ПСП квадратурного (Q) канала. Как I-канальная, так и Q-канальная модуляция дает четыре псевдошумовых элемента на один элемент Уолша с частотой псевдослучайного кода расширения спектра 1.2288 МГц. I- и Q-модулированные данные представляют собой квадратурную фазовую модуляцию со сдвигом, объединенную для передачи.
В сотовой системе МДКР, описанной в вышеупомянутом Патенте США N 4901307, каждая базовая станция обеспечивает в ограниченной территориальной зоне и связывает удаленные устройства радиосвязи в зоне обслуживания с помощью коммутатора сотовой системы с коммутируемой телефонной сетью общего пользования. Когда удаленное устройство радиосвязи приближается к зоне обслуживания другой базовой станции, маршрутизация вызова этого пользователя передается новой базовой станции. Канал передачи сигнала от базовой станции к удаленному устройству радиосвязи называется прямой линией связи, а канал передачи сигнала от удаленного устройства радиосвязи на базовую станцию называется обратной линией связи.
Как было описано выше, интервал элемента псевдошумового кода определяет минимальное разнесение, которое должны иметь две трассы распространения, чтобы их можно было объединить. Прежде чем демодулировать разные трассы распространения сигналов, необходимо сначала определить относительные времена прихода /или сдвиги/ сигналов для разных трасс распространения в принимаемом сигнале. Модем канального элемента выполняет эту функцию посредством "поиска" в последовательности возможных сдвигов для трасс распространения и изменения энергии, принимаемой при каждом таком возможном сдвиге. Если энергия, связанная с возможным сдвигом, превышает некоторый порог, то такому сдвигу может быть присвоен элемент демодуляции сигнала. Затем сигнал, соответствующий этому сдвигу для трасс расширения, может быть просуммирован с составляющими от других элементов демодуляции для соответствующих сдвигов. Способ и устройство определения элементов демодуляции на основе оценки уровней энергии элементов демодуляции поисковой системы раскрыты в заявке на Патент США N 08/144902 от 28 октября 1993 года, переуступленной правопреемнику настоящего изобретения. Такой приемник с разнесением, или многоканальный /RAKE/ приемник, обеспечивает надежную цифровую связь, поскольку замирание должно иметь место для всех трасс одновременно, чтобы параметры суммарного сигнала ухудшились.
На фиг. 1 в качестве примера показан набор сигналов, поступающих на базовую станцию от одного удаленного устройства радиосвязи. Вертикальная ось представляет мощность в децибелах (дБ). На горизонтальной оси указана задержка времени прихода сигнала вследствие задержек многолучевого распространения. Ось, перпендикулярная плоскости страницы (не показана), представляет сегмент времени. Каждый пик сигнала в плоскости страницы соответствует одному и тому же моменту времени, хотя передача осуществлялась удаленным устройством радиосвязи в разные моменты времени. На общей плоскости пики, лежащие правее, соответствуют сигналу, переданному удаленным устройством радиосвязи раньше, чем сигналы, соответствующие пикам, лежащим левее. Например, самый левый пик 2 соответствует самому последнему переданному сигналу. Каждый пик сигнала 2-7 соответствует прохождению по разной трассе и, следовательно, имеет разное время задержки и разную амплитудную характеристику. Шесть различных сигнальных пиков, показанных в виде пиков 2-7, характеризуют собой среду с существенным многолучевым распространением. Обычная городская среда дает меньше пригодных для использования трасс распространения. Уровень собственных шумов системы представлен пиками и провалами, имеющими более низкие уровни энергии. Задачей поискового элемента является определение задержки, измеряемой по горизонтальной оси сигнальных пиков 2-7 для распределения потенциальных элементов демодуляции. Задачей элемента демодуляции является демодуляция набора пиков многолучевого распространения для суммирования их в единый выходной сигнал. Также задачей элементов демодуляции, распределенных по пикам многолучевого распространения, является слежение за пиком, так как он может сдвигаться во времени.
Также можно считать, что по горизонтальной оси отложены единицы сдвига элементов псевдошумового сигнала. В любой данный момент базовая станция принимает множество разных сигналов от одного удаленного устройства радиосвязи, каждый из которых распространялся по своей трассе и может иметь отличную от других задержку. Сигнал от удаленного устройства радиосвязи модулируется с помощью ПСП. Также на базовой станции генерируется копия ПСП. Каждый сигнал многолучевого распространения демодулируется на базовой станции отдельно с помощью кода ПСП, синхронизированного индивидуально. Можно считать, что координаты горизонтальной оси соответствуют сдвигу кода ПСП, который будет использован для демодуляции сигнала с этой координатой.
Заметим, что каждый пик многолучевого распространения изменяется по амплитуде в функции времени, как это показано в виде неровного гребня каждого пика многолучевого распространения. На показанном ограниченном временном отрезке нет больших изменений в пиках многолучевого распространения. В более широком временном диапазоне пики многолучевого распространения исчезают и со временем создаются новые траектории. Пики также могут смещаться в сторону более ранних или более поздних сдвигов в результате изменения длины траектории при движении удаленного устройства радиосвязи в зоне действия базовой станции. Каждый элемент демодуляции отслеживает наибольшие изменения выделенного ему сигнала. Задачей процесса поиска является формирование описания текущей среды многолучевого распространения, воспринимаемой базовой станцией.
В обычной радиотелефонной системе связи в передатчике удаленного устройства радиосвязи может быть использована система вокодирования, которая кодирует речевую информацию в формате переменной скорости. Например, скорость передачи данных может снижаться из-за пауз в речи. Пониженная скорость передачи данных уменьшает уровень перекрестных помех для других пользователей, вызываемых передачей от удаленных устройств радиосвязи. В приемнике или в каком-то ином устройстве, связанным с приемником, используется система вокодирования для восстановления речевой информации. Вдобавок к речевой информации удаленным модулем может передаваться либо только неречевая информация, либо их сочетание.
Вокодер, подходящий для использования в такой среде, описывается в совместно поданной заявке на Патент США N 08/363170 на "Вокодер переменной скорости" от 23 декабря 1994 года, переуступленной правопреемнику настоящего изобретения. Этот вокодер из цифровых выборок речевой информации создает кодированные данные с четырьмя различными скоростями, например, примерно 8000 бит/с, 4000 бит/с, 2000 бит/с и 1000 бит/с на основе речевой активности в течение цикла длиной 20 мс. Каждый блок данных вокодера форматируется с использованием вспомогательных битов в виде кадров данных со скоростями 9600 бит/с, 4800 бит/с, 2400 бит/с и 1200 бит/с. Кадр данных максимальной скорости 9600 бит/с называется кадром полной скорости; кадр данных со скоростью 4800 бит/с называется кадром половинной скорости; кадр данных со скоростью 2400 бит/с называется кадром одной четвертой скорости и кадр данных со скоростью 1200 бит/с называется кадром одной восьмой скорости. Ни в процессе кодирования, ни в процессе форматирования кадров информация о скорости не включается в данные. Если удаленное устройство радиосвязи передает данные со скоростью, меньшей, чем полная скорость, то рабочий цикл сигнала, передаваемого удаленными устройствами радиосвязи, будет такой же, как скорость передачи данных. Например, сигнал с одной четвертой скорости от удаленного устройства радиосвязи передается только одну четвертую часть времени.
Удаленное устройство радиосвязи включает в себя рандомизатор пакетов данных. Рандомизатор пакетов данных определяет, в течение каких интервалов времени удаленное устройство радиосвязи ведет передачу и в течение каких интервалов времени он не ведет передачу при условии заданной скорости передачи данных, конкретный индентификационный номер удаленного устройства радиосвязи и время суток. При работе со скоростью, меньшей полной скорости, рандомизатор пакетов данных в составе удаленного устройства радиосвязи распределяет псевдослучайным образом интервалы активного времени внутри пакета передачи. Соответствующий рандомизатор пакетов данных включается также и в состав базовой станции, так что базовая станция может воссоздать псевдослучайное распределение на основе времени суток и конкретного идентификационного номера удаленного устройства радиосвязи, но базовая станция не знает априори скорость передачи данных передаваемого сигнала.
Интервалы времени при одной восьмой скорости определяют так называемую "учитываемую" группу временных интервалов. Удаленное устройство радиосвязи, работающее с одной четвертой скорости, ведет передачу в течение временных интервалов "учитываемой" группы и еще одного набора распределенных псевдослучайным образом выбранных интервалов. Удаленное устройство радиосвязи, работающее с половинной скоростью, ведет передачу во время временных интервалов одной четвертой скорости и другого набора распределенных псевдослучайным образом интервалов. Удаленное устройство радиосвязи, работающее с полной скоростью, ведет передачу непрерывно. Таким путем, независимо от скорости передачи данных передаваемого сигнала, каждый временной интервал, соответствующий "учитываемой" группе, однозначно определяет интервал времени, когда соответствующее удаленное устройство радиосвязи передает сигнал. Дополнительные подробности, касающиеся рандомизатора пакета данных, описываются в совместно поданной заявке на Патент США N 08/291647 на "Рандомизатор пакетов данных" от 16 августа 1994 года, переуступленной правопреемнику настоящего изобретения.
Чтобы сэкономить системные ресурсы для активных данных при передаче речи, удаленное устройство радиосвязи не передает информацию о скорости передачи данных для каждого блока данных. Следовательно, приемник должен определить скорость, при которой данные кодировались и передавались на основе передаваемого сигнала, так чтобы вокодер, связанный с приемником, мог правильно восстановить речевую информацию. Способ определения скорости, при которой кодировались пакетные данные, без получения информации о скорости от приемника, раскрываются в совместно поданной заявке на патент США N 08/233570 на "Способ и устройство для определения скорости передачи данных с переменной скоростью в приемнике системы связи" от 26 апреля 1994 года, переуступленной правопреемнику настоящего изобретения. Способ определения скорости данных, раскрытый в вышеупомянутой заявке, реализуется после того, как был принят и демодулирован сигнал, вследствие чего информация о скорости процесса поиска отсутствует.
На базовой станции из ансамбля принимаемых сигналов вызовов должен быть идентифицирован каждый отдельный сигнал удаленного устройства радиосвязи. Система и способ демодуляции сигнала удаленного устройства радиосвязи, принимаемого на базовой станции, описаны, например, в Патенте США N 5103459. На фиг. 2 показана блок-схема оборудования базовой станции, описанного в Патенте США N 5103459, для демодуляции сигнала удаленного устройства радиосвязи, передаваемого по обратной линии связи.
Известная типовая базовая станция содержит многоэлементное независимое поисковое устройство и элементы демодуляции. Поисковое устройство и элементы демодуляции управляются микропроцессором. В рассматриваемом в качестве примера варианте для поддержания высокой пропускной способности системы ни одно удаленное устройство радиосвязи в системе не передает пилот-сигнал. Отсутствие пилот-сигнала в обратной линии связи увеличивает время, необходимое для анализа всех возможных временных сдвигов, с которыми может быть принят сигнал от удаленного устройства радиосвязи. Обычно пилот-сигнал передается с уровнем мощности, более высоким, чем сигналы трафика, что повышает отношение сигнал-шум принимаемого пилот-сигнала по сравнению с принимаемыми канальными сигналами трафика. В противоположность этому в идеале каждое удаленное устройство радиосвязи передает сигнал обратной линии связи, который поступает с уровнем мощности, равным уровню мощности, принимаемому от любого другого удаленного устройства радиосвязи, и следовательно, имеющий низкое отношение сигнал-шум. Кроме того, канал пилот-сигнала передает известную последовательность данных. Без пилот-сигнала в процессе поиска необходимо проверять все варианты, по которым могли быть переданы данные.
На фиг. 2 в качестве примера показан вариант известной базовой станции. Базовая станция на фиг.2 имеет одну или более антенн 12, принимающих сигналы обратных линий связи удаленных устройств радиосвязи 14. Обычно зона действия городской базовой станции разделена на три субзоны, называемые секторами. При двух антеннах на один сектор обычная базовая станция имеет всего шесть приемных антенн. Принимаемые сигналы преобразуются с понижением частоты до полосы частот модулирующих сигналов аналоговым приемником 16, который разбивает сигнал на I и Q каналы и посылает эти цифровые значения по сигнальным шинам 18 в модем канального элемента 20. Обычная базовая станция содержит множество модемов канальных элементов, таких как модем канального элемента 20 /на фиг. 2 не показаны/. Каждый модем канального элемента 20 поддерживает одного пользователя. В предпочтительном варианте модем канального элемента 20 содержит четыре элемента демодуляции 22 и восемь поисковых устройств 26. Микропроцессор 34 управляет работой элементов демодуляции 22 и поисковых устройств 26. Псевдошумовой код пользователя в каждом элементе демодуляции 22 и поисковом устройстве 26 настраивается на псевдошумовой код удаленного устройства радиосвязи, выделенный для этого модема канального элемента 20. Микропроцессор 34 пошагово просматривает поисковые устройства 26, используя набор сдвигов, называемый поисковым окном, которое потенциально содержит пики сигнала многолучевого распространения, подходящие для распределения их элементам демодуляции 22. Для каждого сдвига поисковое устройство 26 сообщает микропроцессору 34 уровень энергии, который оно обнаружило в этом сдвиге. Затем микропроцессор 34 присваивает элементы демодуляции 22 трассам распространения, идентифицированным поисковыми устройствами 26. Как только один из элементов демодуляции 22 зафиксировал сигнал на распределенном ему сдвиге, он затем следит за этой трассой сам без контроля со стороны микропроцессора 34, пока на ней не возникнет замирание или пока этот элемент не будет распределен микропроцессором 34 новой трассе распространения сигнала.
В системе по фиг.2 каждый элемент демодуляции 22 и поисковое устройство 26 содержит один процессор БПА 52, способный выполнять одно преобразование БПА в течение интервала времени, равного интервалу символа Уолша. Процессор БПА функционирует в "реальном времени" в том смысле, что одно значение интервала символа Уолша вводится и значение одного символа выводится из процессора БПА. Следовательно, для обеспечения быстрого процесса поиска необходимо использовать больше, чем одно поисковое устройство 26. Каждое поисковое устройство 26 подает на микропроцессор 34 результаты выполненного поиска. Микропроцессор 34 сводит эти результаты в таблицы для использования при присвоении элементов демодуляции 22 поступающим сигналам.
На фиг. 2 показана внутренняя структура только одного элемента демодуляции 22, но понятно, что она применима также и для поисковых устройств 26. Каждый элемент демодуляции 22 или поисковое устройство 26 модема канального элемента имеет соответствующие генераторы 36,38 I- и Q-ПСП и генератор 40 специфически для каждого пользователя ПСП, который используется для выбора конкретного удаленного устройства радиосвязи. Выходной сигнал специфической для каждого пользователя ПСП 40 подвергается операции "исключающее ИЛИ" с помощью соответствующих логических элементов 42 и 44 вместе с выходными сигналами генераторов 36 и 38 I- и Q-ПСП для получения ПСП-1' и ПСП-Q', которые подаются на устройство сжатия 46. Опорные синхронизирующие сигналы генераторов 36, 38, 40 настраиваются на сдвиг распределенного сигнала, так что устройство сжатия 46 коррелирует принимаемые антенной I- и Q-канальные выборки с ПСП-I' и ПСП-Q', согласованной с распределенным сдвигом сигнала. Четыре выхода устройств сжатия, соответствующие четырем псевдошумовым элементам на элемент Уолша, суммируются, образуя один элемент Уолша с помощью сумматоров 48 и 50. Затем накопленный элемент Уолша подается в процессор БПА. Когда получены 64 элемента, соответствующие одному символу Уолша, процессор БПА 52 коррелирует набор из 64 элементов Уолша с каждым из возможных 64 переданных символов Уолша и выдает 64 элементную матрицу данных "мягкого" решения. Затем выход процессора БПА 52 суммируется с выходами других расширенных элементов демодуляции с помощью сумматора 28. Выход сумматора 28 представляет собой демодулированный символ "мягкого" решения, взвешенный посредством доверительного уровня, который точно идентифицирует исходно переданный символ Уолша. Затем данные "мягкого" решения подаются в декодер прямого исправления ошибок 29 для дальнейшей обработки, чтобы восстановить исходный сигнал вызова. Затем этот сигнал вызова посылается через цифровую линию связи, такую как линия связи T1 или E1, которая направляет вызов в коммутируемую телефонную сеть общего пользования 32.
Как и каждый элемент демодуляции 22, каждое поисковое устройство 26 содержит тракт данных демодуляции процессором БПА, способным выполнять одно преобразование БПА в течение интервала времени, равного интервалу символа Уолша. Поисковое устройство 26 отличается от элемента демодуляции только тем, как используется его выходной сигнал и тем, что оно не обеспечивает временное слежение. Для каждого обрабатываемого сдвига каждое поисковое устройство 26 определяет энергию корреляции на этом сдвиге путем сжатия антенных выборок, накопления их в элементы Уолша, выполнения процедуры БПА и суммирования максимальной энергии выхода для каждого символа Уолша, на котором поисковое устройство задерживается при сдвиге. Окончательная сумма сообщается обратно микропроцессору 34. Обычно каждое поисковое устройство 26 в группе с другими по очереди опрашивается через поисковое окно микропроцессором 34, причем каждое из них отделено от соседнего на половину элемента псевдошумового кода. Таким образом, на каждую максимально возможную ошибку сдвига на четверть элемента приходится достаточно энергии корреляции для обеспечения того, чтобы трасса не была пропущена из-за того, что поисковое устройство не установило связь с точным сдвигом для данной трассы распространения. После последовательного просмотра поисковых устройств 26 посредством окна поиска микропроцессор 34 оценивает сообщаемые результаты и ищет трассы с наиболее мощным сигналом для распределения элементов демодуляции, как это описано в вышеупомянутой заявке на патент США N 08/144902.
Среда многолучевого распространения постоянно изменяется, так как удаленное устройство радиосвязи и другие отражающие объекты перемещаются в зоне действия базовой станции. Количество поисков, которые должны быть выполнены, определяется необходимостью достаточно быстро определить условие многолучевого распространения, так чтобы элементы модуляции могли эффективно использовать верно найденные трассы распространения сигналов. С другой стороны, необходимое количество элементов демодуляции является функцией количества упомянутых трасс, найденных для использования в любой момент времени. Для удовлетворения этих требований система по фиг.2 имеет два поисковых устройства 26 и один элемент демодуляции 22 для каждой из четырех используемых интегральных схем /ИС/ демодуляции, всего четыре элемента демодуляции и восемь поисковых устройств на один модем канального элемента. Каждый из этих двенадцати обрабатывающих элементов содержит полный тракт демодуляции данных, включающий процессор БПА, который занимает большую часть дорогостоящей площади интегральной схемы. Вдобавок к четырем ИС демодулятора, модем канального элемента также имеет ИС модулятора и ИС декодера прямого исправления ошибок, всего 6 ИС. Для управления и координации элементов демодуляции и поисковых устройств требуется мощный и дорогой микропроцессор. Как показано на фиг. 2, эти схемы полностью независимы и требуют непосредственного управления со стороны микропроцессора 34 для отслеживания корректных сдвигов и обработки выходных данных БПА. Микропроцессор 34 получает прерывание на каждый символ Уолша, чтобы обработать выходные данные БПА. Такая скорость прерывания сама по себе делает необходимым использование мощного микропроцессора.
Можно было бы обеспечить преимущество, если бы шесть ИС, необходимых для модема, удалось свести к одной ИС, в меньшей степени нуждающейся в поддержке микропроцессора, что уменьшило бы стоимость ИС и стоимость изготовления модема на уровне плат и позволило перейти к использованию более дешевого микропроцессора /или, как вариант, одного мощного микропроцессора, поддерживающего сразу несколько модемов канальных элементов/. Недостаточно просто сократить размеры в процессе производства ИС и заменить шесть микросхем на одну. Основная архитектура поискового устройства должна быть разработана заново для высокоэффективного модема на одной микросхеме. Исходя из вышесказанного, должно быть ясно, что имеется потребность в устройстве для приема и обработки сигнала, которое может демодулировать сигнал вызова с расширенным спектром при низкой стоимости и более эффективной архитектуре.
В настоящем изобретении можно использовать набор описанных выше поисковых устройств, работающих в реальном времени, или один поисковый процессор в интегральном исполнении, который может быстро оценивать большое число сдвигов, потенциально содержащихся в многолучевом принимаемом сигнале вызова.
Настоящее изобретение представляет собой способ поиска сигнала многолучевого распространения, который передается с неизвестной изменяемой скоростью и использует управление уровнем мощности.
Сущность изобретения
Настоящее изобретение представляет собой способ поиска сигнала с многолучевым распространением, который передается с неизвестной изменяемой скоростью и подвергается регулированию уровня мощности. Способ поиска является линейным, в том смысле, что не предпринимается попытка синхронизации процесса поиска с известным временем для содержания данных. Процесс поиска синхронизируется с границами групп управления мощности, чтобы можно было получить точные оценки мощности.
Краткое описание чертежей
Признаки, задачи и преимущества настоящего изобретения станут более очевидными из последующего подробного описания, вместе с чертежами, на которых одинаковые ссылочные символы идентифицируют соответствующие элементы и на которых показано следующее:
фиг. 1 - иллюстрация состояния сигнала в условиях существенного многолучевого распространения;
фиг.2 - блок-схема известной системы демодуляции сети связи;
фиг.3 - пример телекоммуникационной системы с МДКР, выполненной согласно настоящему изобретению;
фиг. 4 - блок-схема модема канального элемента, выполненного согласно настоящему изобретению;
фиг.5 - блок-схема процессора поиска;
фиг.6 - иллюстрация циклического характера буфера антенных выборок, использующего первый сдвиг;
фиг. 7 - иллюстрация циклического характера буфера антенных выборок для второго накопления при первом сдвиге по фиг. 6;
фиг. 8 - иллюстрация циклического характера буфера антенных выборок для второго сдвига;
фиг. 9 - график, показывающий, каким образом устройство поиска обрабатывает входной сигнал приемника в функции времени;
фиг.10 - блок-схема входного каскада устройства поиска;
фиг.11 - блок-схема устройства сжатия устройства поиска;
фиг.12 - блок-схема процессора результата устройства поиска;
фиг.13 - блок-схема логического устройства упорядочения устройства поиска;
фиг.14 - временная диаграмма, показывающая последовательность обработки, изображенной на фиг.5, и соответствующее состояние некоторых элементов логического устройства управления, представленных на фиг.13; и
фиг.15 - альтернативная блок-схема процессора поиска.
Описание предпочтительного варианта осуществления изобретения
В последующем описании способа и системы для обработки телефонных вызовов в цифровой радиотелефонной системе даются различные ссылки на процессы и этапы, которые выполняются для достижения желаемого результата. Следует понимать, что такие ссылки относятся не к действиям или умственным операциям, осуществляемым человеком, а к работе, видоизменению и преобразованию различных систем, включая особенно такие системы, в которых обрабатываются электрические и электромагнитные сигналы и заряды, оптические сигналы или их комбинации. В основе таких систем лежит использование различных информационных запоминающих устройств, часто называемых "памятью", которые запоминают информацию посредством размещения и упорядочения атомных или субатомных заряженных частиц на носителе жесткого диска или в кремнии, арсениде галлия или другой полупроводниковой среды, являющейся основой интегральных схем, а также использование различных устройств обработки информации, часто называемых микропроцессорами, которые изменяют свои параметры и состояние, реагируя на указанные электрические и электромагнитные сигналы и заряды. Также предусмотрена возможность использования памяти и микропроцессоров, которые запоминают и обрабатывают энергию излучения или частицы, имеющие специальные оптические характеристики, или их комбинации, и их применение согласуется с процессом функционирования описываемого изобретения.
Настоящее изобретение может быть реализовано в самых разных системах передачи данных, а в предпочтительном варианте, показанном на фиг. 3, изобретение реализуется в системе 100 для передачи речи и данных, в которой системный контроллер и коммутатор 102 выполняет функции интерфейса и управления, позволяя установить связь с удаленными устройствами радиосвязи 104 через базовые станции 106. Блок контроллера и коммутатора /БКК/ 102 управляет маршрутизацией вызовов между коммутируемой телефонной сетью общего пользования /КТСОП/ 108 и базовыми станциями 106 для передачи на удаленные устройства радиосвязи 104 и от них.
На фиг. 4 показаны модемы канальных элементов 110 А - 110 N и другие элементы инфраструктуры базовой станции, работающие в соответствии со способами МДКР, и форматами данных, описанными в вышеуказанных патентах. Множество антенн 112 подают принимаемый сигнал обратной линии связи 114 в аналоговый приемопередатчик 116. Аналоговый приемопередатчик 116 осуществляет преобразование сигнала обратной линии связи 114 с понижением частоты до полосы частот модулирующих сигналов и дискретизирует сигнал этой полосы частот при восьмикратной частоте псевдошумовых элементов принимаемого сигнала МДКР, как было определено выше. Аналоговый приемопередатчик 116 подает цифровые антенные выборки в модемы канальных элементов 110 А - 110 N посредством сигнала объединительной платы радиоприемника базовой станции. Каждый модем канального элемента 110 А - 110 N может быть присвоен одному удаленному устройству радиосвязи, имеющему активную связь, установленную с базовой станцией. Все модемы канальных элементов 110 А - 110 N практически идентичны по структуре.
Если активному вызову присвоен модем канального элемента 110 А, то входной каскад демодулятора 122 и интегральный поисковый процессор 128 выделяют сигнал от соответствующего удаленного устройства радиосвязи из множества сигналов вызовов, содержащихся в сигнале обратного трактата 114, путем использования ПСП, описанных в вышеуказанных патентах и патентных заявках. Модем канального элемента 110 А включает в себя однокристальный поисковый процессор 128 для идентификации сигналов многолучевого распространения, которые могут быть использованы входным каскадом демодулятора 122. В предпочтительном варианте процессор БПА с квантованием времени 120 обслуживает как интегральный поисковый процессор 128, так и входной каскад демодулятора 122. В отличие от совместно используемых процессора БПА 120 и блока определения относительного максимума 160, интегральный поисковый процессор 128 является автономным, самоуправляемым и независимым устройством. Поисковая архитектура детально описывается в одновременно рассматриваемой заявке на патент США N 08/316177 на "Процессор сигналов многолучевого распространения для системы связи множественного доступа с расширенным спектром" от 30 сентября 1994 года, переуступленной правопреемнику настоящего изобретения.
Процессор БПА 120 является ключевым устройством в процессе демодуляции. В предпочтительном варианте процессор БПА 120 соотносит принимаемые значения символов Уолша с каждым из возможных значений символов Уолша, которые могли быть переданы удаленным устройством радиосвязи. Процессор БПА 120 выдает энергию корреляции, соответствующую каждому из возможных символов Уолша, причем более высокий уровень энергии корреляции соответствует более высокой вероятности того, что удаленным устройством радиосвязи был передан символ, соответствующий этому индексу Уолша. Затем блок определения максимума 160 определяет самый большой из 64 выходных уровней энергии преобразования. Затем максимальная энергия корреляции и соответствующий индекс Уолша из блока определения максимума 160 и каждый из 64 выходных сигналов энергии корреляции из процессора БПА 120 подаются в конвейерный процессор демодулятора 126 для дальнейшей обработки. Максимальная энергия корреляции и соответствующий индекс Уолша из блока определения максимума 160 возвращаются обратно в интегральный поисковый процессор 128.
Конвейерный процессор демодулятора 126 синхронизирует и суммирует символьные данные, получаемые на различных сдвигах, в единый поток демодулированных символов "мягкого" /программируемого/ решения. Вдобавок конвейерный процессор демодулятора 126 вычисляет уровень мощности принимаемого сигнала. Исходя из принимаемого уровня мощности формируется указание, предписывающее удаленному устройству радиосвязи повысить или понизить мощность передачи этого модуля. Команда на управление мощностью проходит через модулятор 140, который добавляет эту команду в сигнал, передаваемый базовой станцией для приема данным удаленным устройством радиосвязи. Этот контур управления мощностью функционирует согласно способу, описанному в вышеуказанном Патенте США N 5056109.
Поток символов "мягкого" решения выводится из конвейерного процессора демодулятора 126 в обратный перемежитель/декодер с прямым исправлением ошибок 130 через микропроцессорный шинный интерфейс 134. Затем данные направляются через обратный цифровой канал 121 в БКК 102, который осуществляет соединение по вы зову с КТС ОП 108.
Канал обработки данных прямой линии связи реализует функции, обратные по сравнению с обратной линией связи. Сигнал подается из КТС ОП 108 через БКК 102 в обратный цифровой канал 121. Обратный цифровой канал 121 подает сигнал на вход кодера/перемежителя 138 через микропроцессор канального элемента 136. После кодирования и перемежения данных кодер/перемежитель 138 подает данные на модулятор 140, где они модулируются, как было описано в вышеуказанных патентах. Выходной сигнал 146 модулятора 140 подается в сумматор передатчика 142, где он добавляется к выходным сигналам других модемов канальных элементов 110 В - 110 N, прежде чем они подвергнутся преобразованию с повышением частоты относительно полосы модулирующих сигналов и усилятся в аналоговом приемопередатчике 116. Способ суммирования раскрыт в совместно поданной заявке на патент США N 08/316 156 на "Последовательный элемент соединения для суммирования множества цифровых сигналов" от 30 сентября 1994 года, переуступленной правоприемнику настоящего изобретения. Как показано в вышеуказанной патентной заявке, сумматор передатчика, соответствующий каждому из модемов канального элемента, может быть включен последовательно в топологию типа "цепочки" в случайном порядке, выдавая результирующий суммарный сигнал, который подается в аналоговый приемопередатчик 116 для трансляции.
На фиг. 5 показаны элементы, входящие в интегральный поисковый процессор 128. Ключевую роль в процессе поиска играет процессор БПА с квантованием времени 120, который, как упоминалось выше, совместно используется интегральным поисковым процессором 128 и входным каскадом демодулятора 122 /на фиг. 5 не показан/. Процессор БПА 120 может выполнять преобразования символов Уолша со скоростью в 32 раза большей, чем процессор БПА на фиг. 2. Такая способность быстрого преобразования делает возможным функционирование модема канального элемента 110 с квантованием времени.
В предпочтительном варианте процессор БПА 120 построен с использованием 6-ступенчатой цепи типа "бабочки". Как подробно описано выше, функция Уолша n-го порядка может быть рекурсивно определена следующим образом:
где W' обозначает логическое дополнение W, a W(1)=0.
В предпочтительном варианте последовательность Уолша генерируется при n= 6, и, следовательно, для соотнесения 64 элементов Уолша одного переданного символа Уолша с каждого из 64 возможных последовательностей Уолша используется 6-ступенчатая матрицы-"бабочки". Структура и способ функционирования процессора БПА 120 подробно раскрыты в совместно поданной заявке на патент США N 08/173 460 на "Способ и устройство для выполнения быстрого преобразования Адамара" от 22 декабря 1993 года, переуступленной правопреемнику настоящего изобретения.
Чтобы воспользоваться преимуществами процессора БПА 120, имеющего тридцатидвухкратную производительность по сравнению с прототипом, работающим в реальном времени, процессор БПА 120 должен быть обеспечен данными для обработки, вводимыми с высокой скоростью. Для удовлетворения этого требования буфер антенных выборок 172 должен быть рассчитан соответствующим образом. Запись в и считывание из буфера антенных выборок 172 осуществляется циклически.
Процесс поиска группируется на наборы поисков отдельных сдвигов. Наивысший уровень группирования - это набор поисков для антенны. Каждый набор поисков для антенны состоит из множества поисковых окон. Обычно каждое поисковое окно в наборе поисков для антенны представляет собой идентично выполняемую группу поисков, где каждое поисковое окно при антенном поиске получает данные от определенной антенны. Каждое поисковое окно выполнено из ряда групп поиска, представляющих собой набор последовательных поисковых сдвигов, выполняющихся в течение времени, эквивалентного длительности символа Уолша. Каждая такая группа поиска состоит из набора элементов группы. Каждый элемент представляет собой единичный поиск на данном сдвиге.
В начале процесса поиска микропроцессор канального элемента 136 посылает параметры, определяющие поисковое окно, которое может быть частью набора антенных поисков. Ширина поискового окна может быть указана в элементах псевдошумового кода. Количество поисковых элементов, необходимых для завершения поискового окна, изменяется в зависимости от количества элементов псевдошумового кода, определенных в поисковом окне. Количество элементов на одну группу поиска может быть определено микропроцессором канального элемента 136 или может быть зафиксировано в виде некоторой константы.
На фиг.1 в качестве примера показан набор сигналов, поступающих на базовую станцию от одного удаленного устройства радиосвязи, из которого станет более понятной взаимосвязь между поисковым окном, группой поиска и элементом группы. Вертикальная ось на фиг. 1 представляет принимаемую мощность в децибелах /дБ/. По горизонтальной оси откладывается задержка по времени прихода сигнала, возникающая из-за задержек многолучевого распространения. Ось /не показана/, идущая перпендикулярно плоскости страницы, представляет сегмент времени. Все пики сигнала в плоскости страницы пришли в одно и то же время, хотя и были переданы удаленным устройством радиосвязи в разное время.
Можно считать, что горизонтальная ось масштабируется в единицах сдвига элементов псевдошумового кода. В любой данный момент времени базовая станция принимает множество различных сигналов от одного удаленного устройства радиосвязи, каждый из которых прошел до отличающейся траектории и может иметь отличную от других задержку. Сигнал удаленного модуля модулируется с помощью ПСП. На базовой станции также генерируется копия ПШП. На базовой станции, если каждый сигнал многолучевого распространения был модулирован индивидуально, появляется необходимость синхронизации кода ПСП с каждым сигналом. Каждая из этих синхронизированных ПСП на базовой станции будет иметь задержку по отношению к эталонному нулевому сдвигу из-за вышеуказанной задержки. По горизонтальной оси может быть отложено количество псевдошумовых элементов, на которое задерживается синхронизированная ПСП по отношению к нулевому эталонному сдвигу базовой станции.
На фиг. 1 сегмент времени 10 представляет набор поискового окна из сдвигов элементов псевдошумового кода, подлежащих обработке. Сегмент времени 10 разделен на пять различных групп поиска, таких как сегмент времени 9. Каждая группа поиска. в свою очередь, состоит из ряда элементов, представляющих действительные сдвиги, являющиеся объектом поиска. Например, на фиг.1 каждая группа поиска состоит из 8 различных элементов, таких как 8.
Для обработки одного элемента группы поиска 8 необходим набор выборок во времени с данным сдвигом. Например, для обработки элемента 8 требуется сжатие набора выборок при сдвиге 8, идущего назад от плоскости страницы по оси времени. Также необходимо сжатие соответствующей ПСП. ПСП может быть определена путем записи времени поступления выборок и сдвига, который необходимо обработать. Требуемый сдвиг может быть объединен с временем прихода для определения соответствующей ПСП, подлежащей корреляционной обработке с принимаемыми выборками.
Когда элемент группы поиска сжимается, выборки с приемной антенны и ПСП принимают ряд значений во времени. Заметим, что выборки с приемной антенны одинаковы для всех сдвигов, показанных на фиг.1, а пики 2-7 показывают в качестве примера пики многолучевого распространения, которые поступают одновременно и различаются только с помощью процесса сжатия.
В предпочтительном варианте, описываемом ниже, каждый элемент группы поиска смещен во времени относительно предыдущего элемента на половину элемента псевдошумового кода. Это означает, что если элемент группы поиска 8 подвергался корреляционной обработке, начиная с показанной на чертеже плоскости среза по направлению вперед во времени /в плоскость страницы, как показано на чертеже/, то тогда элемент слева от указанного элемента 8 будет использовать выборки, начиная с половины элемента во времени назад от показанной плоскости среза. Это продвижение во времени позволяет каждый элемент в общей группе поиска подвергать корреляционной обработке с использованием одной и той же ПСП.
Каждое удаленное устройство радиосвязи принимает сигнал, передаваемый базовой станцией, с задержкой на некоторую величину, возникающую из-за задержки при прохождении через наземную среду. В удаленном устройстве радиосвязи также генерируется один и тот же I и Q короткий псевдошумовой код и длинный псевдошумовой код пользователя. Удаленное устройство радиосвязи генерирует опорные синхронизирующие сигналы на основе опорных синхронизирующих сигналов, которые он принимает от базовой станции. Удаленное устройство радиосвязи использует опорный синхронизирующий сигнал в качестве входного сигнала генераторов I- и Q-псевдошумового короткого и длинного кода пользователя. Информационный сигнал, принимаемый на базовой станции от удаленного устройства радиосвязи, подвергается двухсторонней /в прямом и обратном направлении/ задержке на пути между базовой станцией и удаленным устройством радиосвязи.
Следовательно, если синхронизация псевдошумового генератора, используемого в процессе поиска, подчиняется опорным синхронизирующим сигналам нулевого сдвига на базовой станции, то выходной сигнал генератора будет всегда появляться прежде, чем соответствующий сигнал будет принят от удаленного устройства радиосвязи.
В сигнале квадратурной фазовой модуляции со сдвигом /КФМнС/ данные I-канала и Q-канала сдвинуты друг относительно друга во времени на половину элемента. Следовательно, сжатие КФМнС, используемое в предпочтительном варианте, требует выборки данных с двойной частотой элементов. Также процесс поиска протекает оптимально с данными, дискретизируемыми с половинной частотой элементов. Каждый элемент в группе поиска сдвинут на половину элемента от предыдущего элемента. Разрешающая способность в половину элемента группы поиска обеспечивает то, что пиковые сигналы многолучевого распространения не пропускаются, не будучи обнаруженными. По этим причинам буфер антенных выборок 172 на фиг. 5 запоминает выбранные данные с удвоенной частотой псевдошумовых элементов.
Эквивалент одного символа Уолша считывается из буфера антенных выборок 172 для обработки одного элемента группы поиска. Для каждого последующего элемента из буфера антенных выборок 172 считывается эквивалент одного символа Уолша, сдвинутого на половину псевдошумового элемента от предыдущего элемента. Каждый элемент группы поиска сжимается с помощью той же самой ПСП, считываемой из буфера ПСП 176 устройством сжатия 178 для каждого элемента в группе поиска.
Буфер антенных выборок 172 имеет емкость в два символа Уолша, и в него и из него непрерывно и многократно производится запись и считывание на протяжении всего процесса поиска. В каждой группе поиска первым обрабатывается элемент, имеющий самый последний сдвиг во времени. Самый последний сдвиг соответствует сигналу, который пришел по самой длинной траектории от удаленного устройства радиосвязи до базовой станции. Момент, с которого поисковое устройство начинает обрабатывать группу поиска, привязывается к границам символа Уолша, относящегося к элементу этой границы, имеющему самый последний сдвиг в группе поиска. Временной строб, называемый границей сдвинутого символа Уолша, указывает на самый ранний момент, когда все требуемые выборки имеются в буфере антенных выборок 172, и процесс поиска может быть начат с первого элемента в группе поиска.
Работу буфера антенных выборок 172 легко проиллюстрировать, если учесть ее циклический характер. На фиг. 6 показана диаграмма работы буфера антенных выборок 172. На фиг. 6 окружность 400, показанная жирной линией, представляет сам буфер антенных выборок 172. Буфер антенных выборок 172 содержит ячейки памяти для двух значений данных символов Уолша. Указатель записи 406 циркулирует в буфере антенных выборок 178 в направлении, указанном в реальном времени, что означает, что указатель записи 406 поворачивается в буфере антенных выборок емкостью два символа Уолша в то время, когда эквивалент выборок двух символов Уолша поступает во входной каскад поискового устройства 174. Когда выборки записываются в буфер антенных выборок 172 в соответствии с адресом ячейки памяти, указываемом указателем записи 406, ранее записанные данные переписываются. В предпочтительном варианте буфер антенных выборок 176 содержит 1024 антенных выборки, поскольку каждый из двух символов Уолша содержит 64 элемента Уолша, а каждый элемент Уолша содержит 4 псевдошумовых элемента, каждый из которых отбирается дважды.
Процесс поиска делится на дискретные временные интервалы. В предпочтительном варианте интервал времени равен 1\32 длительности символа Уолша. Выбор 32 интервалов времени на один символ Уолша получается из имеющейся тактовой частоты и количества тактовых циклов, необходимых для выполнения БПА. Для выполнения БПА для одного символа Уолша требуется 64 тактовых цикла. В предпочтительном варианте имеется тактовый генератор, работающий с восьмикратной частотой псевдошумовых элементов, который обеспечивает необходимый уровень характеристик функционирования. Восьмикратная частота псевдошумовых элементов, умноженная на требуемые 64 тактовых импульса, эквивалентна времени, которое уходит на прием эквивалента двух элементов Уолша /данных/. Поскольку в каждой половине буфера имеется 64 элемента Уолша, для считывания всего символа Уолша необходимо 32 интервала времени.
На фиг. 6 набор концентрических дуг вне окружности 400, показанной жирной линией, представляет операцию считывания и записи в буфере антенных выборок 172. Дуги внутри окружности используются для облегчения понимания и не соответствуют операциям считывания или записи. Каждая дуга представляет операцию считывания или записи во время одного интервала времени. Дуга, ближайшая к центру окружности, появляется во времени первой, а каждая последующая дуга представляет операцию, происходящую в более поздний интервал времени, как показано с помощью стрелки времени 414. Каждая из концентрических дуг соответствует части буфера антенных выборок 172, представленного окружностью 400, которая показана жирной линией. Если представить радиусы, выходящие из центра окружности 400, к точкам по концам каждой концентрической дуги, то часть окружности 400 между точками пересечения радиусов и окружности 400 будет представлять доступные ячейки памяти. Например, в течение показанной на фигуре операции на первом интервале времени в буфер антенных выборок 172, представленный дугой 402А, записывается 16 антенных выборок.
На фиг. 6,7 и 8 в качестве примера приняты следующие параметры поиска для проискового окна:
ширина поискового окна = 24 псевдошумовых элемента;
поисковый сдвиг = 24 псевдошумовых элемента;
количество символов для накопления = 2;
количество элементов на одну поисковую группу = 24.
На фиг. 6 также принято, что буфер антенных выборок 172 практически содержит эквивалент полного символа Уолша достоверных данных перед записью, показанной дугой 402А. Во время последующих интервалов времени происходит запись, соответствующая дуге 402В и луге 402С. В течение 32 интервалов времени, имеющихся в наличии в течение времени, эквивалентного одному символу Уолша, операции записи продолжаются от дуги 402А до самой большой дуги 402 FF, которая не показана.
32 интервала времени, представленные дугами с 402А до 402FF, соответствуют времени, используемому для завершения одной поисковой группы. Используя заданные выше параметры, поисковая группа начинает сдвиг на 24 псевдошумовых элемента от эталонного нулевого сдвига, или "реального времени", и содержит в себе 24 элемента. Сдвиг на 24 псевдошумовых элемента соответствует повороту на 16.875 градуса по окружности 400 от начала первой записи, показанной дугой 402А /вычисляемому путем деления сдвига на 24 псевдошумовых элемента на общее число элементов 256 в половине буфера антенных выборок 172 и умножения результата на 180 градусов/. Эта дуга в 16.875 градуса показана в виде дуги 412. 24 элемента поисковой группы соответствуют считываниям, показанным дугами 404A-404X, самая большая из которых не показана. Первое считывание, соответствующее дуге 404A, начинается в некоторый момент поискового сдвига после записи, соответствующей 402C, так что в наличии имеется набор смежных данных. Каждое последующее считывание, например 404B, смещается по отношению к предыдущему на один адрес памяти, соответствующий 1/2 псевдошумового элемента во времени. В течение показанной поисковой группы считывания происходят по направлению к более ранним сдвигам, показанным дугами 404A-404X, с течением времени против времени против часовой стрелки и в направлении, противоположном вращению указателя записи 406. 24 считывания, представленные дугами 404A-404X, обходят дугу, показанную под номером 418. Проведение считываний по направлению к более ранним выборкам имеет то преимущество, что обеспечивается непрерывный поиск внутри поискового окна при реализации каждой поисковой группы. Это преимущество подробно раскрывается ниже.
При каждом из считываний, соответствующих дугам от 404A до 404X, на устройство сжатия 178 подается эквивалент одного значения символа Уолша /данных/. Следовательно, считывание соответствует охвату 180 градусов на окружности 400. Заметим, что в поисковой группе, показанной на фиг. 6, последняя запись, соответствующая дуге 402FF, и последнее считывание, соответствующее дуге 404X, не включают каких-либо общих адресов памяти для обеспечения смежных достоверных данных. Однако можно предположить, что если диаграмма считывания и записей продолжалась, то они в действительности пересекались бы, и в этих условиях нельзя было бы обеспечить достоверные данные.
В большинстве случаев передачи сигналов результат эквивалента элемента данных поисковой группы, получаемый в течение временного эквивалента одного символа Уолша, недостаточен для обеспечения точной информации о расположении разнесенных сигналов. В этих случаях поисковая группа может быть многократно повторена. Результаты для элементов в последующих поисковых группах с общим сдвигом накапливаются процессором 162 результатов поиска, что подробно разъяснено далее. В этом случае заданные выше параметры поиска указывают, что количество символов для накопления на каждом сдвиге равно двум. На фиг. 7 показана поисковая группа по фиг. 6, повторяемая с одним и тем же сдвигом в течение временного эквивалента последующего символа Уолша. Заметим, что буфер антенных выборок 172 содержит эквивалент двух символов Уолша, так что данные, необходимые для обработки в течение поисковой группы, показанной на фиг. 7, были записаны для поисковой группы, показанной на фиг. 6. В этой конфигурации отстоящие друг от друга на 180 градусов ячейки памяти представляют один и тот же псевдошумовой сдвиг.
После завершения двух поисковых групп по фиг. 6 и 7 процесс поиска переходит к следующему сдвигу в поисковом окне. Величина продвижения равна ширине обрабатываемой поисковой группы и в данном случае составляет 12 псевдошумовых элементов. Ширина окна определяет, сколько сдвигов поисковых групп необходимо для завершения поискового окна. В данном случае для перекрытия поискового окна шириной 24 псевдошумовых элемента необходимо два разных сдвига. На фиг.8 ширина окна показана дугой 412. Второй сдвиг для этого поискового окна начинается со сдвига, следующего за последним сдвигом предыдущей поисковой группы, и продолжается вокруг точки номинального нулевого сдвига, устанавливаемого по местоположению начала первой записи, указанной дугой 430A. Здесь имеется 24 элемента внутри поисковой группы, показанной дугами 432A-432X, причем самая большая из них не показана. 32 записи показаны дугами 430A-430FF. Таким образом, последняя запись, показанная дугой 430FF, и последнее считывание, показанное дугой 432X, граничат друг с другом в буфере антенных выборок 172.
Поисковая группа, показанная на фиг. 8, повторяется на противоположной стороне буфера антенных выборок 172 почти так же, как поисковая группа на фиг. 6 повторяется на фиг. 7, поскольку параметры поиска предписывают, чтобы каждый символ накапливался дважды. После завершения второго накопления второй поисковой группы интегральный процессор поиска 128 готов начать работу с другим поисковым окном. Следующее поисковое окно может иметь новый сдвиг, или может определять новую антенну, или и то и другое.
На фиг. 8 местоположение границы между областью считывания и областью записи буфера отмечено меткой 436. На фиг. 6 граница отмечена меткой 410. Сигнал, указывающий точку во времени, соответствующую меткам 410 и 436, называется стробом смещенного символа Уолша, который также показывает, что появился эквивалент нового символа Уолша выборок. Когда поисковые группы внутри окна продвигаются к более ранним сдвигам, граница между областями буфера для считывания и для записи поворачивается на шаге фиксации против часовой стрелки, как показано на фиг.8. Если после завершения текущего поискового окна требуется большое изменение в обрабатываемом сдвиге, то строб сдвинутого символа Уолша может быть продвинут на большую часть окружности цикла.
Фиг. 9 дает графическое представление процесса поиска во времени. Время отображается в единицах символов Уолша по горизонтальной оси. Адреса буфера антенных выборок 172 и адреса буфера 176 ПСП показаны по вертикальной оси также в единицах символов Уолша. Поскольку буфер 172 антенных выборок имеет емкость два символа Уолша, то адресация буфера 172 антенных выборок охватывает границы четного символа Уолша, но на фиг.9 для примера показаны адреса перед их сверткой один поверх другого. Выборки записываются в буфер 172 антенных выборок по адресу, взятому непосредственно с момента, когда они были получены, так что указатель записи 181 в буфере 172 антенных выборок представляет собой прямую с наклоном сорок пять градусов. Обрабатываемый сдвиг отображается в базовый адрес в буфере 174 антенных выборок для начала считывания символа Уолша выборок для одного элемента поисковой группы. Элементы показаны на фиг. 9 в виде практически вертикальных линейных сегментов указателей считывания 192. Каждый элемент отображается в символ Уолша по высоте, обозначенной на вертикальной оси, и в 1/32 символа Уолша, указанного по горизонтальной оси.
Промежутки по вертикали между элементами поисковой группы обусловлены входным каскадом 122 демодулятора, прерывающим процесс поиска, чтобы использовать процессор БПА 120. Входной каскад 122 демодулятора функционирует в реальном времени и имеет наивысший приоритет на использование процессора БПА 120, всякий раз когда он имеет текущий или очередной набор данных для обработки. Следовательно, обычно входному каскаду 122 демодулятора предоставляется возможность использования процессора БПА 120 на границе каждого символа Уолша, соответствующей сдвигу псевдошумового сигнала, который демодулируется входным каскадом 122 демодулятора.
На фиг. 9 показаны те же самые поисковые группы, что и на фиг. 6, 7 и 8. Например, поисковая группа 194 имеет 24 элемента, каждый из которых соответствует одной из дуг 404A-404X на фиг.6. На фиг.9 для поисковой группы 194 указатель 410 показывает строб сдвинутого символа Уолша, соответствующий аналогичному указателю на фиг. 6. Для считывания текущих выборок каждый элемент поисковой группы должен находиться ниже указателя записи 181. Наклон вниз элементов вместе с поисковой группой указывает шаги к более ранним выборкам. Поисковая группа 195 соответствует поисковой группе, показанной на фиг. 7, а поисковая группа 196 соответствует поисковой группе, показанной на фиг. 8.
В поисковом окне, определенном вышеуказанными параметрами, определены только 24 элемента на одну поисковую группу, хотя данная поисковая группа имеет 32 доступных интервала времени. Каждый элемент может быть обработан в течение одного интервала времени. Однако практически невозможно увеличить количество элементов на одну поисковую группу до 32, чтобы согласовать количество квантов времени в течение поисковой группы. Входной каскад 122 демодулятора использует некоторые из имеющихся интервалов времени процессора БПА. Имеется также временная задержка, связанная с продвижением поисковой группы, когда процедура считывания должна ожидать осуществления операции записи, чтобы заполнить буфер достоверными данными для нового сдвига. Также необходим некоторый запас для синхронизации с интервалом времени границы обработки после обнаружения строба сдвинутого символа Уолша. Все эти факторы ограничивают на практике количество элементов, которые могут быть обработаны в одной поисковой группе. В некоторых случаях количество элементов на одну поисковую группу может быть увеличено, например, если входной каскад 122 демодулятора имеет только один присвоенный демодулирующий элемент и, следовательно, прерывает процессор БПА 120 один раз за поисковую группу. Следовательно, в предпочтительном варианте количество элементов на поисковую группу регулируется микропроцессором канального элемента 136. В альтернативных вариантах количество элементов на одну поисковую группу может быть постоянной фиксированной величиной.
Также может иметь место значительная дополнительная задержка при коммутации антенн источников на входе в буфер выборок или изменении точки начала поискового окна или интервала между поисками. Если одна поисковая группа требует конкретный набор выборок, а следующая группа для другой антенны требует использование перекрывающейся части буфера, то следующая группа должна отсрочить обработку, пока не появится следующая граница сдвинутого символа Уолша, с момента появления которой будет иметься законченный символ Уолша выборок для нового антенного источника. На фиг. 9 поисковая группа 198 обрабатывает данные от другой антенны, по сравнению с антенной для поисковой группы 197. Горизонтальная линия 188 указывает область памяти, соответствующую входным выборкам новой антенны. Отметим, что поисковые группы 197 и 198 не используют какие-либо общие области памяти.
Для каждого интервала времени в буфер выборок должны записываться два элемента Уолша, а из буфера выборок может быть считан один полный символ Уолша. В предпочтительном варианте в течение каждого интервала времени имеет место 64 тактовых цикла. Полный элемент Уолша из выборок содержит четыре набора выборок: текущие I-канальные выборки, прежние I-канальные выборки, текущие Q-канальные выборки и прежние Q-канальные выборки. В предпочтительном варианте каждая выборка состоит из четырех бит. Следовательно, за один тактовый импульс от буфера антенных выборок 172 требуется шестьдесят четыре бита. Используя однопортовое ОЗУ, самый простой вариант буфера удваивает ширину слова до 128 бит и расщепляет буфер на два 64-битовых отрезка /64-битового слова/ в виде буферов 168,170 для независимого считывания/записи четных и нечетных элементов Уолша. Затем записи, поступающие в буфер с гораздо меньшей частотой, мультиплексируются между операциями считывания, которые осуществляют переключение между двумя банками данных на последовательных тактовых циклах.
Считывание выборок элементов Уолша из четных и нечетных буферов 168,170 элементов Уолша имеет произвольное выравнивание по отношению к физическому выравниванию слова в ОЗУ. Поэтому при первом считывании интервала времени обе половины считываются в устройство сжатия 178, образуя окно шириной в два элемента Уолша, из которого получается один элемент Уолша с выравниванием по текущему сдвигу. Для поисковых сдвигов четных элементов Уолша адрес буфера для четного и нечетного элементов Уолша для первого считывания один и тот же. Для сдвигов нечетных элементов Уолша четный адрес для первого считывания сдвигается на единицу от нечетного адреса, обеспечивая начало последующего элемента Уолша от нечетной половины буфера выборок. Дополнительные элементы Уолша, необходимые для устройства сжатия 178, могут быть поданы на него посредством считывания из одного буфера элементов Уолша. Далее последующие считывания всегда обеспечивают обновленное окно шириной в два элемента Уолша, из которого извлекается элемент Уолша, выровненный с обрабатываемым в текущий момент сдвигом.
Согласно фиг. 5, для каждого элемента в поисковой группе в процессе сжатия используется один и тот же символ Уолша ПСП из буфера 176 ПСП. Для каждого тактового цикла в интервале времени необходимы четыре пары псевдошумовых выборок I'-канала u Q'-канала. При использовании однопортового ОЗУ ширина слова удваивается и считывается из половины буфера многократного. Затем в цикле, не используемом для считывания, выполняется единичная запись в буфере 176 ПСП, требуемая для одного интервала времени.
Поскольку процесс поиска может определить поиск сдвигов псевдошумового сигнала до двух символов Уолша, задержанных относительно текущего момента, то должен запоминаться эквивалент четырех символов Уолша ПСП. В предпочтительном варианте буфер 176 ПСП представляет собой ОЗУ емкостью 128 слов на 16 бит. Требуется четыре символа Уолша, поскольку начальный сдвиг может изменяться на 2 символа Уолша, и коль скоро выбран начальный сдвиг, эквивалент одного символа Уолша ПСП необходим для корреляции, что означает, что для процесса сжатия необходимо иметь эквивалент трех символов Уолша. Поскольку одна и та же ПСП используется многократно, данные в буфере 176 ПСП не могут быть переписаны во время процесса сжатия, соответствующего одной поисковой группе. Следовательно, необходимо иметь эквивалент одного дополнительного символа Уолша в памяти для запоминания данных ПСП при их генерации.
Данные, которые записываются в буфер 176 ПСП и буфер 172 антенных выборок, обеспечиваются входным каскадом устройства поиска 174. Блок-схема входного каскада устройства поиска 74 показана на фиг. 10. Входной каскад устройства поиска 174 включает в себя генераторы I и Q-ПСП 202, 206 короткого кода и генератор ПСП пользователя 204 длинного кода. Значения, выдаваемые генераторами I- и Q-ПСП 202, 206 короткого кода и генеретор ПСП пользователя 204 длинного кода частично определяются временем суток. Каждая базовая станция имеет универсальный стандарт синхронизации, например, GPS синхронизацию для создания синхронизирующего сигнала. Каждая базовая станция также передает в эфир синхронизирующий сигнал на удаленные устройства радиосвязи. На базовой станции опорные синхронизирующие сигналы имеют нулевой сдвиг, поскольку они настроены на опорные сигналы всемирного времени.
Выходной сигнал генератора ПСП пользователя 204 длинного кода подвергается логической операции "исключающее ИЛИ" вместе с выходным сигналом генераторов I- и Q-ПСП 202,206 коротких кодов с помощью логических элементов XOR /"исключающее ИЛИ"/ 208 и 210 соответственно. /Такой же процесс осуществляется также и в удаленном устройстве радиосвязи, и выходной сигнал используется для модуляции сигнала, передаваемого удаленным устройством радиосвязи/. Выходной сигнал логических элементов XOR 208 и 210 запоминается в последовательно-параллельном сдвиговом регистре 212. Последовательно-параллельный сдвиговый регистр 212 буферизирует последовательности до ширины буфера 176 ПСП. Затем выходной сигнал последовательно-параллельного сдвигового регистра 212 записывается в буфер 176 ПСП по адресу, который берется с опорной отметки времени с нулевым сдвигом. Таким образом, входной каскад устройства поиска 174 подает последовательные псевдошумовые данные в буфер 176 ПСП.
Входной каскад устройства поиска 174 подает также антенные выборки в буфер 172 антенных выборок. Выборки приема 118 отбираются с одной из множества антенн мультиплексора 216. Отобранные выборки приема подаются на ключевую схему с фиксацией состояния 218, где они прореживаются, что означает, что одна четверть выборок отбирается для использования в процессе поиска. Выборки приема 118 были отобраны с восьмикратной частотой псевдошумовых элементов аналоговым приемопередатчиком 116 /по фиг.4/. Обработка согласно алгоритму поиска предназначена для выборок, отбираемых с половинной частотой псевдошумовых элементов. Следовательно, в буфер 172 антенных выборок должна проходить только четверть принимаемых выборок.
Выходной сигнал ключевой схемы с фиксацией состояния 218 подается в последовательно-параллельный сдвиговый регистр 214, который буферизирует выборки до ширины буфера 172 антенных выборок. Затем выборки записываются в буферах четных и нечетных элементов Уолша 168,170 по адресам, которые также берутся с опорной отметки времени с нулевым сдвигом. Таким способом устройство сжатия 178 может синхронизировать данные антенных выборок с известным сдвигом по отношению к ПСП.
В соответствии с фиг. 5, в течение каждого тактового цикла в интервале времени устройство сжатия 178 отбирает элемент Уолша антенных выборок из буфера 172 антенных выборок и соответствующий набор значений ПСП из буфера 176 ПСП и выводит I- и Q-канальный элемент Уолша в процессор БПА через мультиплексор 124.
На фиг.11 показана подробная блок-схема устройства сжатия 178. Ключевая схема с фиксацией состояния 220 для четных элементов Уолша 220 и ключевая схема с фиксацией состояния 222 для нечетных элементов Уолша фиксирует данные от буфера 168 четных элементов Уолша и буфера 170 нечетных элементов Уолша соответственно. Блок мультиплексоров 224 выделяет элемент Уолша выборок, подлежащих использованию, из эквивалента двух элементов Уолша выборок, представляемых ключевыми схемами с фиксацией состояния 220 и 222 для четных и нечетных элементов Уолша. Логический блок выбора 226 мультиплексора определяет границу отобранного элемента Уолша на основе сдвига обрабатываемого элемента поисковой группы. Элемент Уолша выводится на блок схем "исключающее ИЛИ" устройства сжатия /КФМн/ 228 сигнала с квадратурной фазовой манипуляцией.
Значения ПСП из буфера 176 ПСП фиксируются ключевой схемой с фиксацией состояния 234 для ПСП. Многорегистровое циклическое сдвиговое устройство 232 сдвигает выходной сигнал ключевой схемы с фиксацией 234 на основе сдвига обрабатываемого элемента и подает ПСП в блок схем "исключающее ИЛИ" устройства сжатия 228 КФМн, где осуществляется условное инвертирование антенных выборок на основе ПСП. Затем значения, получившиеся после операции "исключающее ИЛИ", суммируются посредством дерева сумматоров 230, которое выполняет операцию суммирования в процессе сжатия КФМн и затем суммирует вместе четыре выхода сжатых элементов, образуя элемент Уолша для ввода в процессор БПА 120.
В соответствии с фиг.5, процессор БПА 120 получает от устройства сжатия 178 через мультиплексор 124 64 элемента Уолша и, используя 6-ступенчатую решетку, коррелирует эти шестьдесят четыре входные выборки с каждой из шестидесяти четырех функций Уолша в интервале времени из шестидесяти четырех тактовых циклов. Для определения сигнала корреляции с наибольшей энергией от процессора БПА 120 может быть использован детектор максимума 160. Выходной сигнал детектора максимума 160 подается на процессор результатов поиска 162, являющегося частью интегрального процессора поиска 128.
Процессор результатов поиска 162 подробно представлен на фиг. 12. Процессор 162 также работает в режиме квантования времени. Поступающий на него управляющий сигнал подвергается конвейерной задержке для согласования с задержкой в два интервала времени от начала ввода элементов Уолша в процессор БПА 120 до получения выходного сигнала максимальной энергии. Как объяснялось выше, набор параметров поискового окна может предписывать, какое количество эквивалентов символов Уолша данных было накоплено, прежде чем будут обработаны результаты выбранного сдвига. При параметрах, используемых в примерах по фиг. 6,7,8 и 9, количество символов для накопления равно 2. Процессор результатов поиска 162, наряду с другими функциями, выполняет функцию суммирования.
Когда процессор результатов поиска 162 суммирует последовательно поступающие символы Уолша, он должен запоминать накопленную сумму для каждого элемента в поисковой группе. Эти накопленные суммы запоминаются в ОЗУ накопления символов Уолша 240. Результаты по каждой поисковой группе вводятся в сумматор 242 от декодера максимума 160 для каждого элемента. Сумматор 242 суммирует существующий результат с соответствующим промежуточным значением, имеющимся в ОЗУ накопления символов Уолша 240. При накоплении последнего символа Уолша для каждого элемента поисковой группы промежуточный результат считывается из ОЗУ накопления символов Уолша 240 и суммируется с помощью сумматора 242 с конечной энергией от этого элемента для получения последнего результата поиска для данного сдвига элемента. Затем результаты поиска сравниваются с наилучшими результатами, полученными при поиске до того момента, который будет пояснен ниже.
В вышеупомянутой одновременно рассматриваемой патентной заявке США N 08\ 144902 в предпочтительном варианте элементы демодуляции распределяются на основе лучших результатов, полученных при поиске. В данном предпочтительном варианте в регистре лучших результатов 250 запоминается восемь лучших результатов. /В других вариантах может запоминаться меньшее или большее количество результатов/. Регистр промежуточных результатов 164 запоминает пиковые значения и их соответствующий ранговый порядок. Если энергия текущего поиска превышает по меньшей мере одно из значений энергии в регистре промежуточных результатов, то логический блок управления процессором промежуточных результатов 254 отбрасывает восьмой лучший результат в регистре промежуточных результатов 164 и вставляет новый результат вместе с соответствующим рангом, сдвигом псевдошумового сигнала и антенной, соответствующей данному результату элемента поисковой группы. Все результаты с меньшим рангом понижаются на один ранг. Специалистам известно большое число способов, обеспечивающих такого рода сортировку. В рамках объема данного изобретения может быть использован любой из них.
Процессор результатов поиска 162 имеет фильтр локального пика, содержащий в основной своей части компаратор 244 и ключевую схему с фиксацией состояния предыдущего значения энергии 246. Фильтр локального пика, если он включен, запрещает обновление регистра промежуточных результатов 164, даже когда энергия, определенная в результате поиска, дает право на это, если результат поиска не представляет локальный пик многолучевого распространения. Таким путем фильтр локального пика предотвращает ввод сильного, но "размазанного" многолучевого излучения в регистр промежуточных результатов 164, что в противном случае не оставило бы места для более слабых, но отчетливых сигналов многолучевого излучения, которые могут быть более верными кандидатами для демодуляции.
Реализация фильтра локального пика достаточно проста. Значение энергии суммирования предыдущего элемента поисковой группы запоминается в ключевой схеме с фиксацией состояния для предыдущего значения энергии 246.
Сумма для текущего элемента сравнивается с хранящимся значением с помощью компаратора 244. Выходной сигнал компаратора 244 указывает, какой из двух его входных сигналов больше, и этот сигнал фиксируется в логическом блоке управления процессора результатов поиска 254. Если предыдущая выборка представляла локальный максимум, то логический блок управления процессора результатов поиска 254 сравнивает предыдущий результат энергии с данными, хранящимися в регистре промежуточных результатов 164, как описывалось выше. Если фильтр локального пика выключен микропроцессором канального элемента 136, то тогда всегда выполняется сравнение с регистром промежуточных результатов 164. Если либо первый, либо последний элемент поисковой группы на границе поискового окна имеет спад, то тогда ключевая схема с фиксацией спада настраивается так, чтобы крайнее значение границы рассматривать как пик.
Простой реализации фильтра локальных пиков способствует проведение считываний по направлению к более ранним символам внутри поисковой группы. Как показано на фиг. 6, 7, 8 и 9, внутри поисковой группы каждый элемент продвигается к сигналам, поступающим во времени раньше. Такая направленность означает, что внутри поискового окна последний элемент поисковой группы и первый элемент последующей поисковой группы являются соседними в сдвиге. Следовательно, работа фильтра локального пика не должна изменяться, и выходной сигнал компаратора 244 остается достоверным при пересечении границ поисковой группы.
В конце обработки поискового окна значения, хранящиеся в регистре промежуточных результатов 164, передаются в регистр лучших результатов 250, данные из которого считываются микропроцессором канального элемента 136. Процессор результатов поиска 162, таким образом, имеет большую рабочую нагрузку от микропроцессора канального элемента 136, обработку которой в системе по фиг. 2 требуется производить независимо по результату каждого элемента поисковой группы.
В предыдущих разделах основное внимание уделялось тракту обработки данных интегрального поискового процессора 128 и подробному описанию того, как строчные антенные выборки 118 преобразуются в итоговое описание многолучевого распространения на выходе регистра лучших результатов 250. В последующих разделах детально описывается, как управляется каждый элемент в тракте данных обработки поиска.
Блок управления поиском 166 по фиг. 5 детально представлен на фиг. 13. Как упоминалось ранее, микропроцессор канального элемента 136 определяет набор параметров поиска, включающий группу антенн для поиска, запоминаемых в буфере выбора антенн 348, начальный сдвиг, запоминаемый в буфере поискового сдвига 308, количество элементов на одну поисковую группу, запоминаемое в буфере 312 ширины группы, ширину поискового окна, запоминаемую в буфере 314 ширины поиска, количество символов Уолша для накопления, запоминаемое в буфере 316 накопления символов Уолша, и управляющее слово, запоминаемое в буфере 346 управляющего слова.
Начальный сдвиг, запоминаемый в буфере 308 поискового сдвига, определяется с разрешением в восемь элементов. Начальный сдвиг указывает, какие выборки во входном каскаде устройства поиска 174 удаляются посредством прореживания с помощью ключевой схемы с фиксацией состояния 218 на фиг. 10. Благодаря буферу антенных выборок шириной в два символа Уолша 172 в этом варианте самое большое значение начального сдвига составляет половину элемента псевдошумового кода, что меньше двух полных символов Уолша.
До этого момента была раскрыта базовая конфигурация для выполнения поиска. В действительности имеется несколько видов заранее определенных поисков. Когда удаленное устройство радиосвязи изначально пытается получить доступ в систему, оно посылает сигнал радиомаяка, называемый преамбулой, с использованием нулевого символа Уолша. Нулевой символ Уолша - это символ Уолша, содержащий все логические нули вместо единиц и нулей, как было описано выше. При выполнении поиска преамбулы устройство поиска ищет удаленное модуль, посылающий сигнал радиомаяка с нулевым символ Уолша по каналу доступа. Результатом поиска при поиске преамбулы является энергия для нулевого символа Уолша. Когда выполняется поиск канала доступа в режиме захвата, детектор максимума 160 выводит энергию для нулевого символа Уолша независимо от выявленной максимальной выходной энергии. Управляющее слово, хранящееся в буфере 346 управляющего слова, включает в себя бит преамбулы, который указывает, когда выполняется поиск преамбулы.
Как объяснялось выше, система управления мощностью согласно предпочтительному варианту измеряет уровень сигнала, получаемого от каждого удаленного устройства радиосвязи и формирует команду управления мощностью, предписывающую удаленному устройству радиосвязи повысить или понизить мощность передачи данного удаленного устройства радиосвязи. Система управления мощностью работает с использованием символов Уолша, называемом группой управления мощностью, во время работы канала трафика. /Функционирование канала трафика следует за работой канала доступа и подразумевает работу во время активного вызова/. Все символы Уолша внутри одной группы управления мощностью передаются с использованием одной и той же команды управления мощностью в удаленном устройстве радиосвязи.
Выше также говорилось, что в предпочтительном варианте осуществления настоящего изобретения сигнал, передаваемый удаленным устройством радиосвязи, имеет изменяемую скорость /передачи данных/ во время работы канала трафика. Во время процесса поиска скорость, используемая удаленным устройством радиосвязи для передачи данных, на базовой станции не известна. При накоплении последовательных символов очень важно, чтобы передатчик во время накопления не выключался. Последовательные символы Уолша в группе управления мощностью пропускаются как группа, что означает, что 6 символов Уолша, составляющие группу управления мощностью, в предпочтительном варианте, либо все пропускаются, либо все не пропускаются.
Таким образом, если параметр поиска предписывает, что множество символов Уолша должно быть накоплено во время работы канала трафика, то процесс поиска должен выравнивать каждую поисковую группу, чтобы начинать и закончить его в рамках одной группы управления мощностью. Управляющее слово, запоминаемое в буфере 346 управляющего слова, включает в себя бит выравнивания группы управления мощностью. С помощью бита выравнивания группы управления мощностью, установленного в единицу, что указывает на поиск канала трафика, процесс поиска синхронизирует по границе следующей группы управления мощностью вместо границы следующего сдвинутого символа Уолша.
Управляющее слово, запоминаемое в буфере 346 управляющего слова, также включает в себя бит включения фильтра обнаружения пика, упоминаемого ранее в связи с фиг. 8.
Устройство поиска работает либо в непрерывном режиме, либо в одношаговом режиме в соответствии с установкой бита "непрерывный /одношаговый" управляющего слова. В одношаговом режиме после выполнения поиска интегральный поисковый процессор 128 возвращается в состояние ожидания дальнейших инструкций. В непрерывном режиме интегральный поисковый процессор 128 постоянно осуществляет поиск, и в момент, когда в микропроцессор канального элемента 136 поступает сигнал о том, что получены результаты, интегральный поисковый процессор 128 начинает следующий поиск.
Блок управления поиском 166 формирует сигналы синхронизации, используемые для управления процессом поиска, который выполняется интегральным поисковым процессором 128. Блок управления поиском 166 посылает опорные синхросигналы с нулевым сдвигом в генераторы I- и Q-ПСП 202, 206 коротких кодов и генератор ПСП пользователя 204 длинного кода и сигнал включения на ключевую схему с фиксацией состояния разряжения 218 и сигнал выбора в мультиплексор 216 во входном каскаде устройства поиска 174. Он обеспечивает адреса считывания и записи для буфера 176 ПСП и буферов четных и нечетных элементов Уолша 168 и 170. Он выдает текущий сдвиг для управления работой устройства сжатия 178. Он обеспечивает опорную синхронизацию внутри интервала времени для процессора БПА 120 и определяет, использует ли процесс поиска или процесс демодуляции процессор БПА 120, путем управления мультиплексором 124 с входом БПА. Он обеспечивает несколько версий конкретных внутренних синхронизирующих стробов с конвейерной задержкой для логического блока управления процессора результатов поиска 254 по фиг. 12, разрешая ему просуммировать результаты сдвигов для определенного числа накопленных символов Уолша. Блок управления поиском 166 обеспечивает регистр лучших результатов 250 конвейерным сдвигом и информацией для антенн, соответствующих запомненным значениям накопленной энергии.
Согласно фиг. 13, счетчик системного времени 342 синхронизируется по опорному синхросигналу с нулевым сдвигом. В предпочтительном варианте, как было подробно описано ранее, системный тактовый генератор работает с восьмикратной частотой элементов псевдошумового кода. Имеется 256 псевдошумовых элементов в символе Уолша и 6 символов Уолша в группе управления мощностью, всего для 6х256х8=12288 системных тактовых импульсов на одну группу управления мощностью.
Таким образом в предпочтительном варианте счетчик системного времени 342 содержит четырнадцатибитный счетчик, который отсчитывает 12288 системных тактовых импульсов. Входная опорная синхронизация для генераторов I- и Q-ПСП 202, 206 коротких кодов и генератора ПСП пользователя 204 длинного кода по фиг.10 во входном каскаде устройства поиска 174 берется от счетчика системного времени 342. /Выходной сигнал генератора ПСП пользователя 204 длинных кодов также формируется на основе более длинных системных опорных синхросигналов, которые не повторяются примерно в течение 50 дней. Более длинный опорный сигнал не управляется со стороны процесса поиска и действует как заранее установленное значение. Продолжение функционирования с использованием заранее установленного значения управляется счетчиком системного времени 342/. Адреса для буфера 176 ПСП и буферов 168 и 170 четных и нечетных элементов Уолша берутся от счетчика системного времени 342. Счетчик системного времени 342 фиксируется ключевой схемой 328 в начале каждого интервала времени. Выходной сигнал ключевой схемы с фиксацией 328 отбирается через адресные мультиплексоры 330,332 и 334, которые обеспечивают адреса записи, соответствующие текущему интервалу времени, когда в эти буферы осуществляется запись в некоторый более поздний момент внутри интервала времени.
Накопитель сдвига 310 отслеживает сдвиг обрабатываемого в данный момент элемента поисковой группы. Начальный сдвиг, хранящийся в буфере поискового сдвига 308, загружается в накопитель сдвига 310 при начале каждого поискового окна.
Накопитель сдвига 310 уменьшает свое значение с каждым элементом поисковой группы. В конце каждой поисковой группы, чтобы можно было повторить эту операцию для дальнейших накоплений, количество элементов на одну поисковую группу, хранящееся в буфере 312 ширины группы, вычитается из накопителя сдвига, чтобы привязать его снова к первому сдвигу в поисковой группе. Таким способом процесс поиска снова осуществляет развертку поисковой группы для накопления другого символа Уолша. Если процесс поиска осуществил развертку для текущей поисковой группы при накоплении последнего символа Уолша, то накопитель сдвига 310 уменьшает свое значение на единицу путем выбора входа "-1" мультиплексора 304 повторной поисковой группы, который осуществляет сдвиг первого элемента в следующей поисковой группе.
Выходной сигнал накопителя сдвига 310 всегда представляет сдвиг обрабатываемого в данный момент элемента и поэтому используется для управления вводом данных в устройство сжатия 178. Выходной сигнал накопителя сдвига 310 суммируется сумматорами 336 и 338 с выходным сигналом внутренней синхронизации /по интервалам времени/ от счетчика системного времени 342 для генерирования последовательности адресов внутри интервала времени, соответствующего элементу поисковой группы. Выход сумматоров 336 и 338 отбирается через мультиплексоры 330 и 332 адресов для подачи на буфер антенных выборок 172 адресов считывания.
Выходной сигнал накопителя сдвига 310 также сравнивается компаратором 326 с выходным сигналом счетчика системного времени 342 для формирования строба сдвинутого символа Уолша, который указывает, что буфер 172 антенных выборок имеет достаточно правильных данных для начала процесса поиска.
Счетчик поисковой группы 320 отслеживает количество элементов, которое осталось обработать в текущей поисковой группе. Счетчик поисковой группы 320 загружается по ширине поискового окна, записанной в буфер 314 ширины поиска в начале поискового окна. Счетчик поисковой группы 320 увеличивает свое значение, после того как завершится процесс накопления последнего символа Уолша каждой поисковой группы. Когда будет достигнуто конечное значение счетчика, это значит, что все сдвиги в поисковом окне обработаны. Для обеспечения индикации о том, что близок конец текущего поискового окна выходной сигнал счетчика поисковой группы 320 суммируется с помощью сумматора 324 с выходным сигналом буфера 312 ширины поисковой группы. Индикация окончания поискового окна показывает время, с которого буфер 172 антенных выборок может начать заполняться выборками данных от другой антенны при подготовке к следующему поисковому окну без потери содержимого, необходимого для текущего поискового окна.
Когда микропроцессор канального элемента 136 задает параметры поискового окна, он может установить, что поисковое окно будет выполняться для множества антенн. В таком случае идентичные параметры поискового окна повторяются с использованием выборок от ряда антенн. Такая группа поисковых окон называется набором антенных поисков. Если набор антенных поисков определяется микропроцессором канального элемента 136, то этот антенный набор программируется с помощью значения, записанного в буфере выбора антенны 348. После завершения набора антенных поисков микропроцессор канального элемента 136 приводится в состояние готовности.
Счетчик элементов 318 поисковой группы содержит количество элементов, оставшихся для обработки в текущей поисковой группе. Значение счетчика элементов возрастает на единицу с каждым обработанным элементом, и этот счетчик загружается выходным сигналом буфера 312 ширины поисковой группы, когда процесс поиска находится в состоянии ожидания или при завершении поисковой группы.
Счетчик накопления символов Уолша 322 подсчитывает количество символов Уолша, оставшихся для накопления в течение текущей поисковой группы. Этот счетчик загружается количеством символов Уолша для накопления, которое хранится в буфере 316 накопления символов Уолша, когда процесс поиска находится в состоянии ожидания или после завершения развертки поисковой группы при накоплении последнего символа Уолша. В противном случае счетчик при завершении каждой поисковой группы уменьшает свое значение.
Счетчик достоверности ввода 302 загружается всякий раз, когда изменяется входная антенна или настройка фильтра прореживания. Он загружается минимальным числом выборок, требуемым в процессе поиска для обработки поисковой группы, на основе выходного сигнала буфера 312 ширины поисковой группы /то есть одного символа Уолша плюс эквивалент ширины одной поисковой группы выборок/. Каждый раз, когда в буфер 172 антенных выборок записывается антенная выборка, значение счетчика достоверности ввода 302 возрастает на единицу. Когда счетчик достигает конечного значения, он посылает сигнал включения, разрешающий начало процесса поиска. Счетчик достоверности ввода 302 также обеспечивает механизм поддержания процесса поиска, когда сдвиги последующих поисковых окон не позволяют обеспечить непрерывную обработку данных.
Процесс поиска может находиться либо в состоянии ожидания, либо синхронизации, либо в активном состоянии. Блок управления упорядочением поиска 350 поддерживает текущее состояние. Интегральный поисковый процессор 128 использует состояние ожидания, когда на модем канального элемента 110 подается сигнал сброса. Во время состояния ожидания все счетчики и накопители в блоке управления поиском 166 загружаются соответствующими параметрами поиска, как было описано выше. Как только микропроцессор канального элемента 136 с помощью управляющего слова дает команды процессу поиска начинать непрерывный или одношаговый поиск, интегральный поисковый процессор 128 переходит в состояние синхронизации.
В состоянии синхронизации процесс поиска всегда ожидает границу сдвинутого символа Уолша. Если данные в буфере антенных выборок еще недостоверны или если установлен бит настройки группы управления мощностью и символ Уолша находится не на границе группы управления мощностью, то тогда интегральный поисковый процессор 128 остается в состоянии синхронизации, пока не возникнут соответствующие условия на границе следующего сдвинутого символа Уолша. При наличии соответствующего сдвинутого символа Уолша процесс поиска может перейти в активное состояние.
Интегральный поисковый процессор 128 остается в активном состоянии, пока он не обработает поисковую группу, и в этот момент он возвращается в состояние синхронизации. Если интегральный поисковый процессор 128 находится в одношаговом режиме, он может перейти из активного состояния в состояние ожидания после завершения последнего элемента поисковой группы для окончательного накопления символов Уолша для последней поисковой группы в поисковом окне. Затем интегральный поисковый процессор 128 ожидает команды от микропроцессора канального элемента 136, чтобы инициировать другой поиск. Если же интегральный поисковый процессор 128 находится в непрерывном режиме, то тогда в этот момент он загружает новый набор параметров поиска и возвращается в состояние синхронизации для ожидания сдвинутого символа Уолша с начальным сдвигом, подлежащего обработке при новом поиске. Активное состояние - это единственное состояние, в котором обрабатываются выборки антенных данных. В состояниях ожидания или синхронизации процесс поиска просто отслеживает время с помощью счетчика системного времени 342 и продолжает запись в буфер 176 ПСП и буфер 172 антенных выборок, так что, когда процесс поиска переходит в активное состояние, эти буферы будут готовы для использования.
На фиг. 14 в качестве примера показана временная диаграмма накопления первого символа Уолша второй поисковой группы в поисковом окне, например, в виде поисковой группы, показанной на фиг. 9. Третий символ Уолша, называемый опорным системным тактовым импульсом с нулевым сдвигом, показан разделенным на тридцать два интервала времени. Состояние поиска 372 изменяется от состояния синхронизации до активного, когда индикация границы сдвинутого символа Уолша, соответствующая символу Уолша 3, указывает, что буфер 172 антенных выборок готов с достоверными выборками к обработке на данном сдвиге. Во время следующего интервала времени обрабатывается первый элемент поисковой группы. Процесс поиска продолжается с использованием каждого интервала времени для обработки элемента поисковой группы, как показано символом "S" в интервалах времени 374, если входной каскад демодулятора 122 не использует процессор БПА 120, что показано символом "D" в интервалах времени 374. Процесс поиска заканчивает обработку каждого элемента в поисковой группе и возвращается в состояние синхронизации перед границей следующего сдвинутого символа Уолша, соответствующего символу Уолша 4. Также показано состояние счетчика поисковой группы 362, возрастающее в активном состоянии, пока оно не достигнет конечного состояния, указывающего на то, что обработана вся поисковая группа. Здесь показано возрастающее состояние счетчика сдвига 364 между интервалами времени, соответствующими элементу поисковой группы, так что это можно использовать для получения адреса считывания сдвига буфера выборки в течение интервала времени. Состояние счетчика сдвига 364 конвейерно задерживается в виде подсчета сдвига для регистра лучших результатов 366. Счетчик сдвига 368 получает приращения в процессе накопления конечного символа Уолша 370.
Таким образом, конфигурация однокристального поискового процессора благодаря буферизации антенных выборок и использованию процессора преобразования с квантованием времени может независимо устанавливать последовательность поиска, определяемую набором параметров поиска, анализировать результаты и представлять суммарный отчет о лучших траекториях, чтобы использовать их для повторного расширения элемента демодуляции. Это уменьшает относительную нагрузку на управляющий микропроцессор, так что можно использовать более дешевый микропроцессор, а также уменьшает непосредственные затраты на интегральные микросхемы, давая возможность выполнить весь модем канального элемента на одной микросхеме.
Описанные здесь общие принципы могут быть использованы в системах, где применяются альтернативные схемы передачи. Вышеуказанное описание основывалось на приеме сигнала обратного тракта, где отсутствует пилот-сигнал. По прямому тракту согласно предпочтительному варианту базовая станция передает пилот-сигнал. Пилот-сигнал - это сигнал, несущий известные данные, поэтому отпадает необходимость в процедуре БПА, используемой для определения того, какие данные были переданы. Для воплощения настоящего изобретения интегральный поисковый процессор для приема сигнала, содержащего пилот-сигнал, не содержит процессор БПА и не использует функцию обнаружения максимума. Процессор БПА и детектор максимума 160 на фиг. 5 могут быть заменены, например, простым накопителем 125, показанным на фиг. 15. Операция поиска при наличии пилот-сигнала аналогична операции поиска канала доступа в режиме захвата, описанном выше.
Вышеописанная архитектура поиска может быть использована для выполнения поисков самыми разными способами. Наиболее эффективным является линейный поиск. Линейный поиск выполняется путем линейного поиска потенциальных временных сдвигов в порядке, не зависящем от вероятности того, что удаленное устройство радиосвязи ведет передачу. При поиске сигнала удаленного устройства радиосвязи базовая станция должна знать ожидаемый диапазон зоны действия. Например, в предпочтительном варианте обычная базовая станция перекрывает диапазон порядка 50 километров, что подразумевает наличие задержки, связанной с подтверждением приема, 350 микросекунд или примерно 430 элементов псевдошумового кода. Также в среде многолучевого распространения, где сигналы имеют не прямые траектории, сигнал удаленного устройства радиосвязи может быть задержан чуть ли не вдвое по сравнению с прямой траекторией распространения, имея в виду, что поиск должен вестись по набору из почти 1000 различных сдвигов псевдошумового сигнала. При обнаружении сигнала удаленного устройства радиосвязи он демодулируется и становится известным примерное расстояние до удаленного устройства радиосвязи. В связи с этим возможные сдвиги псевдошумового сигнала, которые необходимо определить, чтобы обеспечить обнаружение большинства достоверных многолучевых сигналов, существенно уменьшаются.
В рамках данного поиска по группе управления мощностью имеются три причины, по которым сигнал не может быть обнаружен при данном сдвиге псевдошумового сигнала. Во-первых, сигнал может не прийти с заданным сдвигом. Удаленное устройство радиосвязи может выдать несколько сигналов многолучевого распространения, но количество создаваемых многолучевых сигналов составляет лишь очень малую часть от всех сдвигов, которые подвергаются поиску. Таким образом, большинство сдвигов превышают порог обнаружения, потому что нет сигнала удаленного устройства радиосвязи с данным сдвигом.
Во-вторых, сигнал может поступать с заданным сдвигом псевдошумового сигнала, но с замиранием на протяжении большей части всего времени поиска. Как пояснялось выше, характеристики многолучевого распространения радиоканала могут привести к замиранию сигнала. Замирание определяется характеристиками фазирования канала с многолучевым распространением. Замирание появляется, когда векторы многолучевого распространения суммируются неблагоприятным образом, образуя принимаемый сигнал, по уровню меньший, чем любой отдельный вектор. Таким образом, если сигнал, который долгое время был достоверным, вдруг сильно замирает во время проведения поиска, то он не сможет быть обнаружен в процессе поиска.
В третьих, сигнал может поступить с заданным сдвигом псевдошумового сигнала, но в случае, когда передатчик удаленного устройства радиосвязи в рассматриваемый период времени не передает сигнал. Как пояснялось выше, в предпочтительном варианте удаленное устройство радиосвязи формирует пакетный сигнал. Удаленное устройство радиосвязи содержит вокодер с регулируемой частотой, который формирует блоки данных с изменяемой частотой. Рандомизатор пакета данных определяет, в течение каких периодов времени удаленное устройство радиосвязи ведет передачу и в течение каких периодов времени он не ведет передачу данных, выдавая скорость передачи данных сигнала, подлежащего передаче, конкретный идентификационный номер удаленного устройства радиосвязи и время суток. При работе с частотой меньшей полной частоты, рандомизатор пакета данных в удаленном устройстве радиосвязи распределяет случайным образом периоды активного времени внутри пакета передачи. Соответствующий рандомизатор пакета данных также включается в состав базовой станции, так что базовая станция может воссоздать псевдослучайное распределение на основе времени суток и конкретного идентификационного номера удаленного устройства радиосвязи, но во время процесса поиска отсутствует информация о скорости передачи. Как было отмечено выше, периоды времени восьмикратной частоты определяют так называемую совершенную группу временных интервалов. Таким путем, независимо от скорости данных в передаваемом сигнале, каждый временной период, соответствующий совершенной группе, точно соответствует интервалу времени, когда соответствующее удаленное устройство радиосвязи передавало сигнал. Во время всех других временных интервалов удаленное устройство радиосвязи может передавать или не передавать данные в зависимости от соответствующей скорости кодирования.
Если установлен линейный поиск, для того чтобы получить достоверные измерения мощности, то процесс поиска ограничивает полное время поиска /то есть количество накоплений символов Уолша на одном поисковом сдвиге/, чтобы начать и закончить поиск в границах одной группы управления мощностью, как более подробно объяснялось выше. Считается, что поиск, идущий только внутри одной группы управления мощностью, синхронизирован с границами группы управления мощностью. Если процесс поиска с данным сдвигом накапливался безотносительно границ группы управления мощностью и удаленное устройство радиосвязи передавало со скоростью, меньшей полной скорости, то достоверные результаты поиска, соответствующие группе управления мощностью, где стробировался сигнал удаленного устройства радиосвязи, могут быть просуммированы с шумом, накопленным во время следующей группы управления мощностью, когда сигнал от удаленного устройства радиосвязи не проходил. Суммирование результатов поиска, соответствующих группе управления мощностью, когда сигнал удаленного устройства радиосвязи не проходил, разрушает полезные результаты, накопленные во время управления мощностью, когда сигнал удаленного модуля стробировался.
Один из способов поиска можно использовать для поиска только тех групп управления мощностью, которые соответствуют совершенным группам. Даже если выполняется поиск только совершенной группы, процесс поиска и процесс распределения элементов демодуляции должен быть в состоянии обработать ситуацию, при которой накопленная энергия не превышает порог обнаружения, но в действительности сигнал со сдвигом присутствует благодаря характеристикам непредсказуемого замирания канала. Таким образом, есть более эффективная схема для накопления энергии во всех группах управления мощностью, независимо от того, соответствуют или нет они совершенным группам. Если при поиске обнаруживается энергия, которая не соответствует совершенной группе, генерируются дополнительные достоверные данные в добавление к данным, генерируемым на основе поиска только совершенной группы.
Как отмечалось выше, поиск преамбулы отличается от поиска, выполняемого во время работы канала трафика. Когда удаленное устройство радиосвязи изначально пытается получить доступ в систему, он посылает сигнал радиомаяка, называемый преамбулой, в котором используется нулевой символ Уолша. Нулевой символ Уолша - это символ Уолша, который содержит все логические нули вместо половины единиц и половины нулей, как описывалось выше. При выполнении поиска преамбулы поисковое устройство ищет любое удаленное устройство радиосвязи, посылающее сигнал радиомаяка из нулевых символов Уолша по каналу доступа. В предпочтительном варианте передача преамбулы всегда идет с полной скоростью и никогда не прерывается. Таким образом, во время поиска преамбулы нет необходимости в синхронизации с границами группы управления мощностью.
Существует множество конфигураций систем связи с коллективным доступом и расширенным спектром, подробно здесь не описанных, но в которых применимо настоящее изобретение. Например, вместо кодирования Уолша и декодирования с использованием БПА можно было бы использовать другие методы кодирования и декодирования. Предыдущее описание предпочтительных вариантов предназначено для того, чтобы специалисты могли осуществить и использовать настоящее изобретение. Специалистам должны быть очевидны различные модификации этих вариантов, а сформулированные здесь исходные принципы могут быть применены в других вариантах без использования изобретательских способностей. Таким образом, предполагается, что настоящее изобретение не ограничивается показанными здесь вариантами его осуществления, а должно соответствовать самому широкому объему, согласующемуся с раскрытыми здесь принципами и новыми признаками.
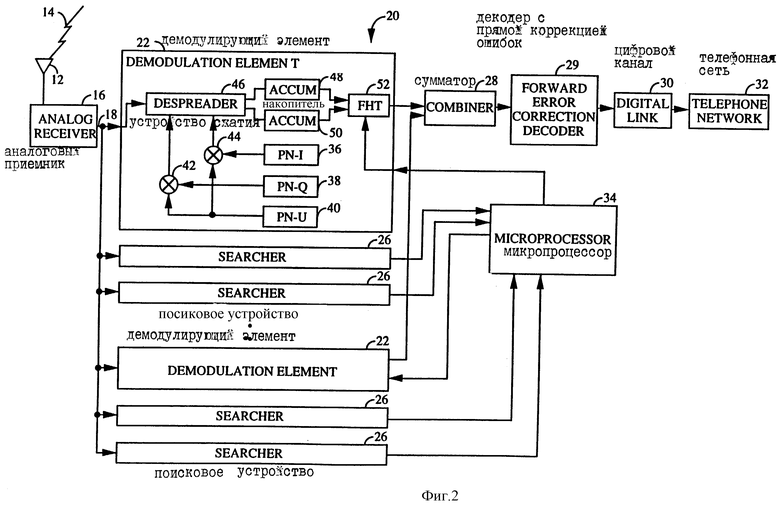
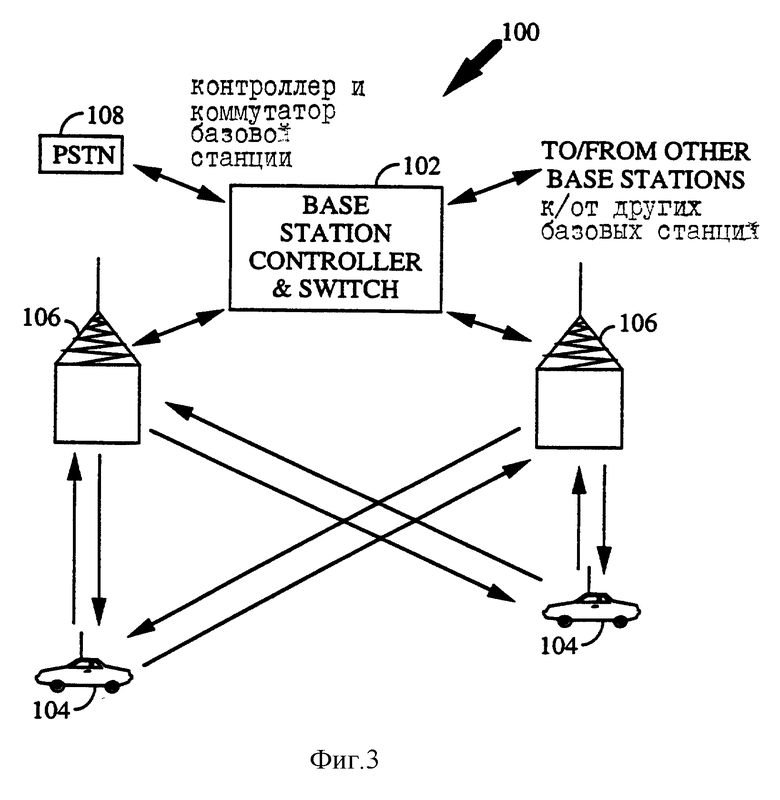
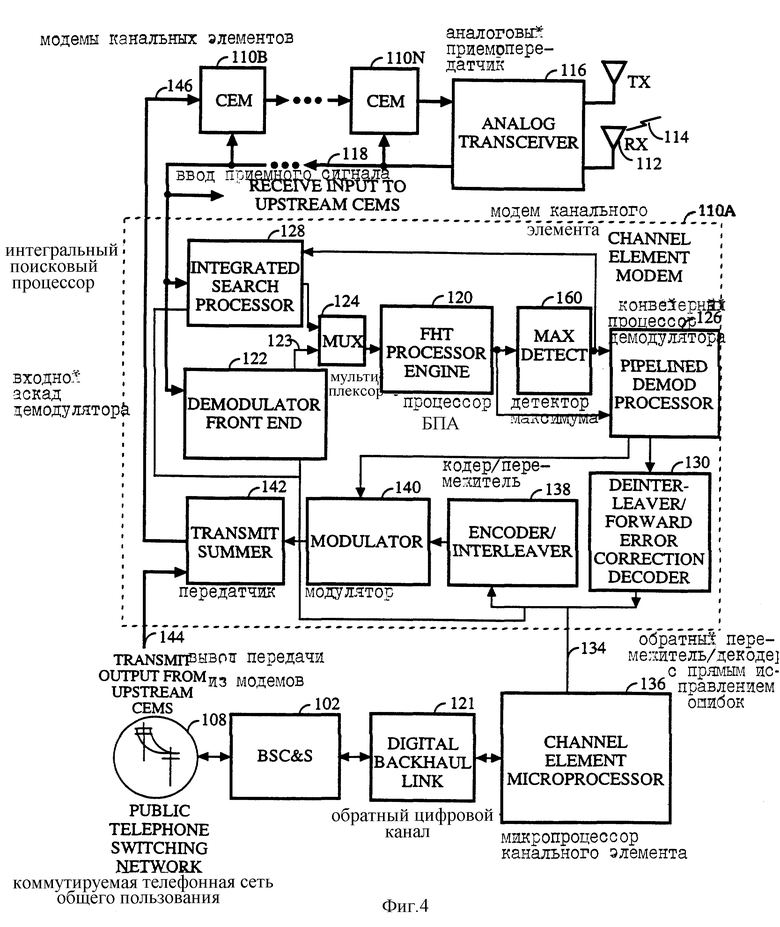
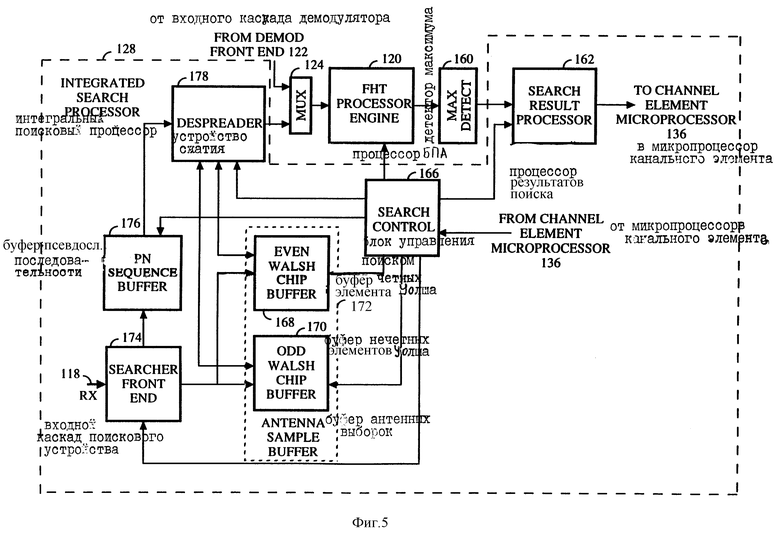
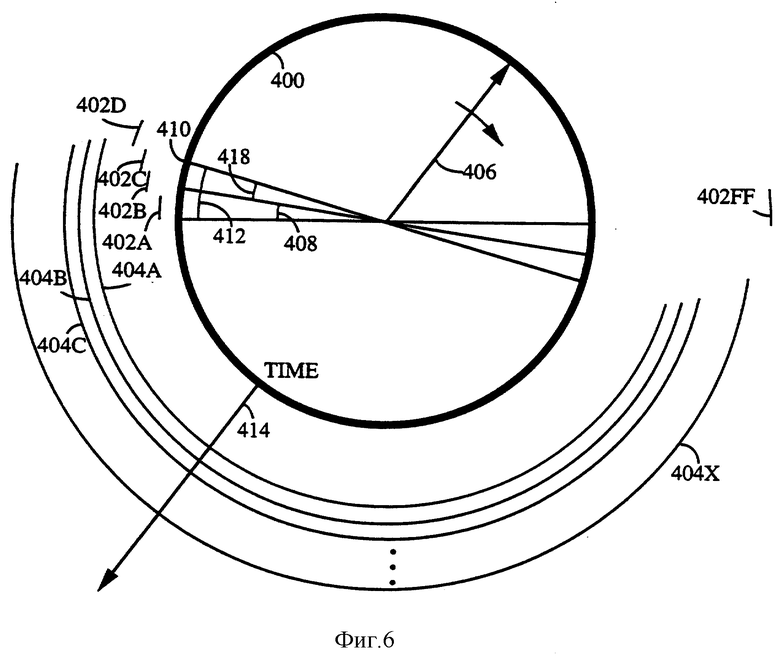
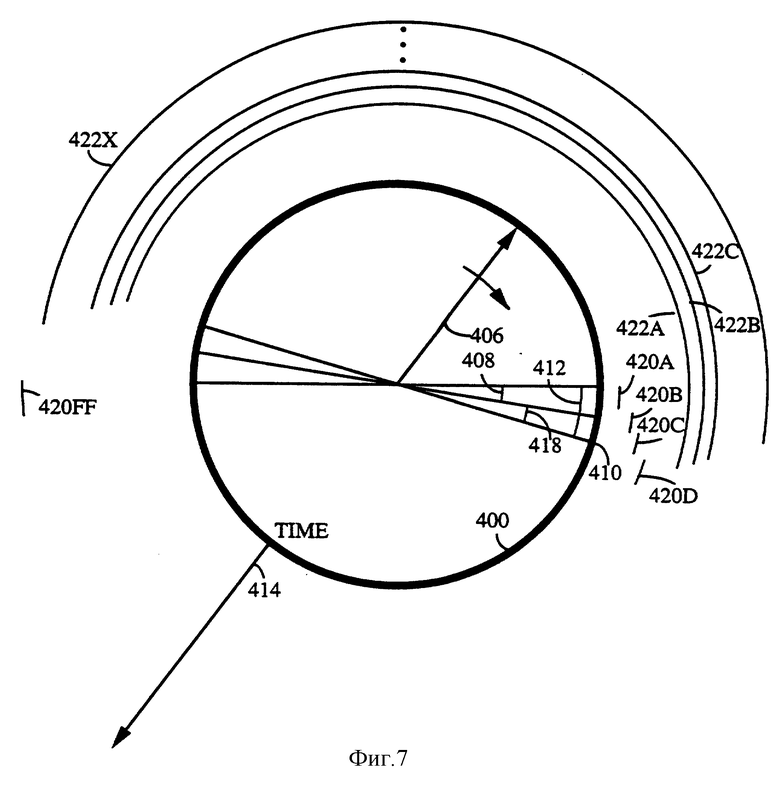
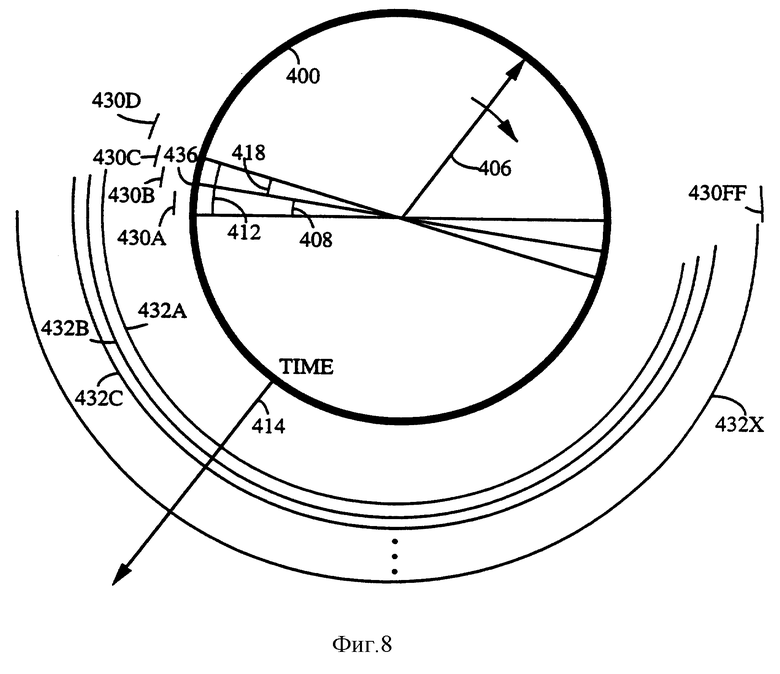
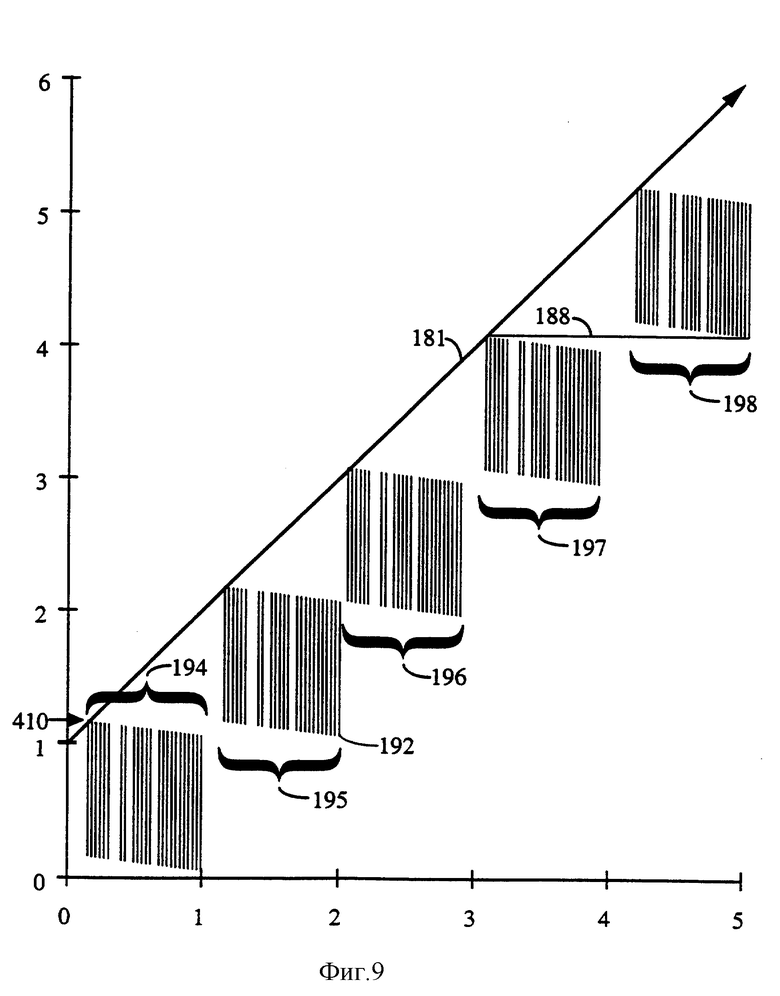
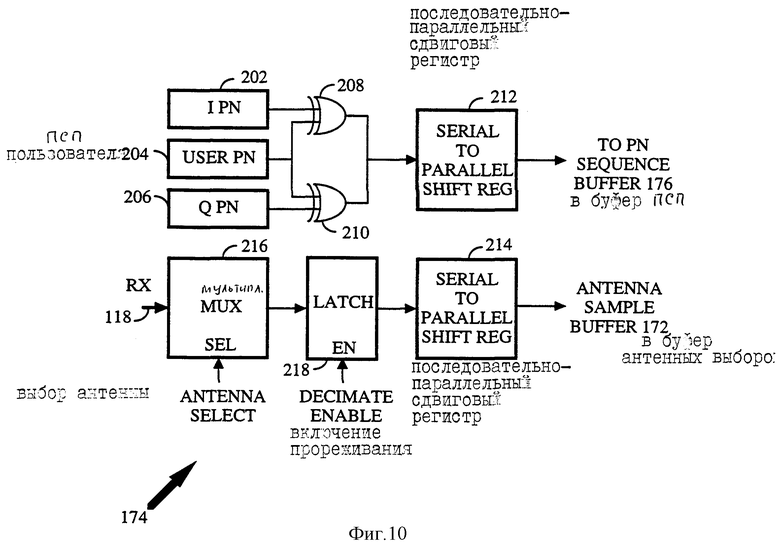
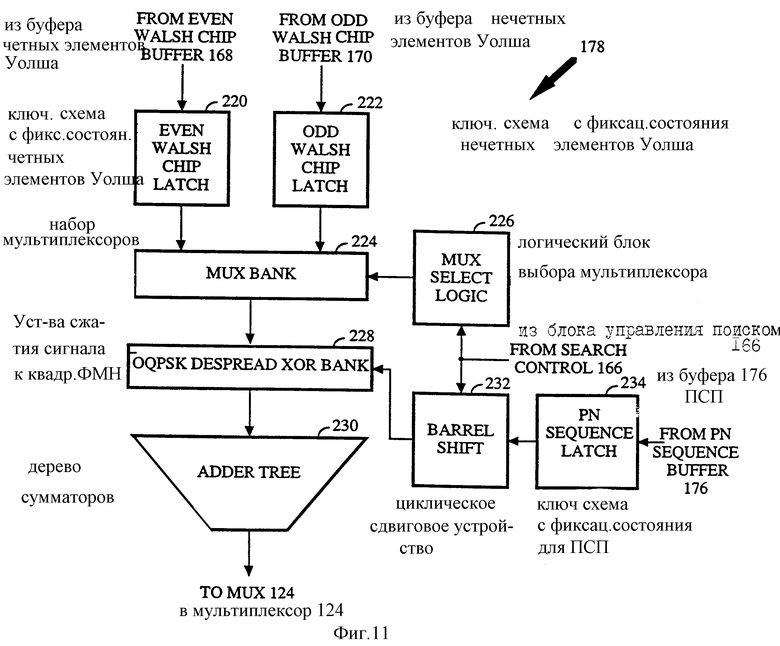
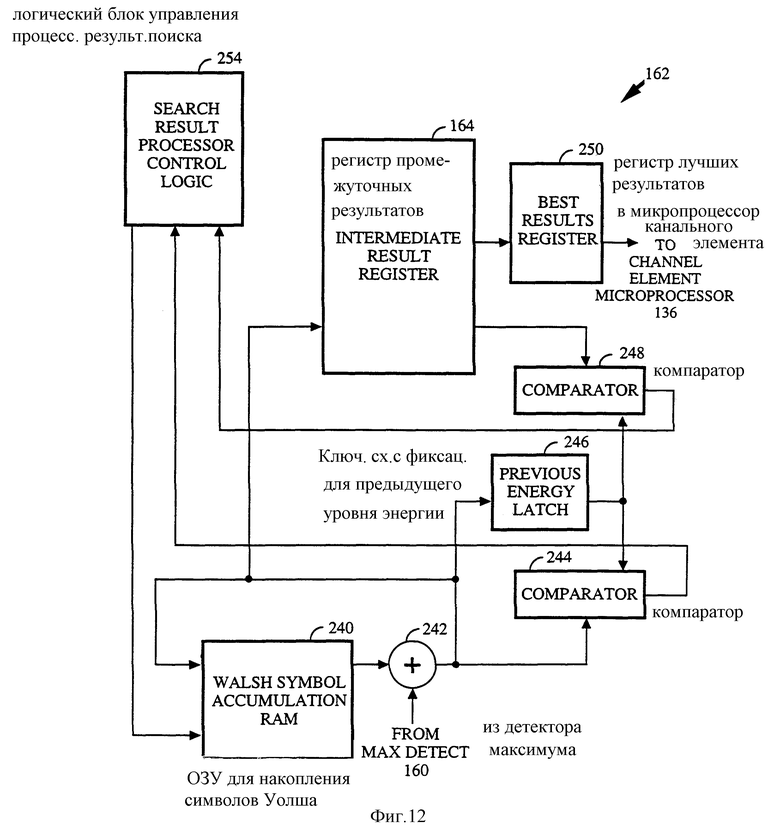
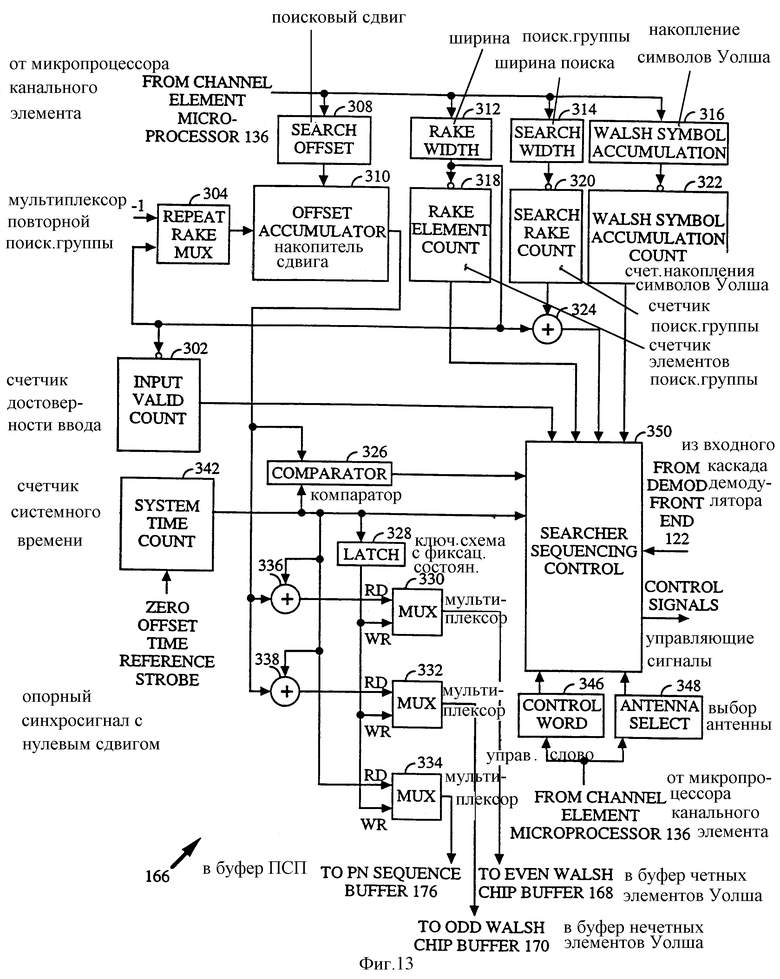
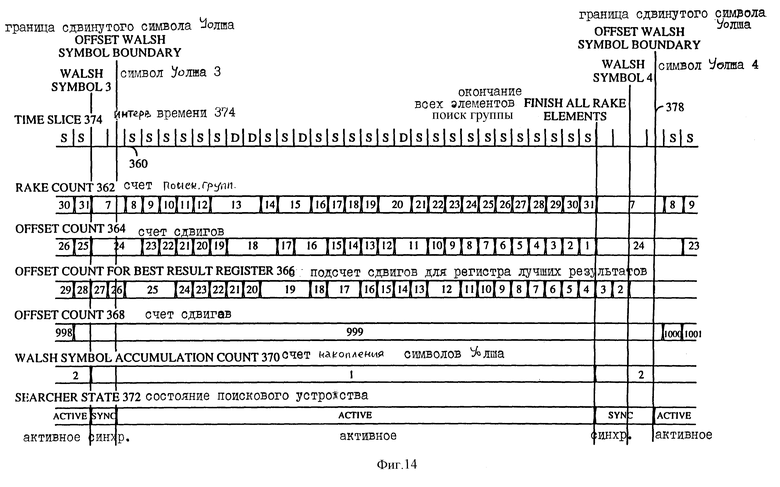
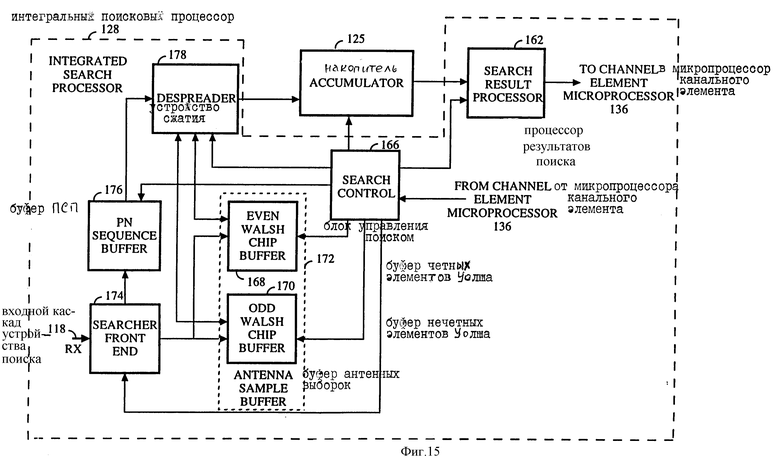
Интегральный поисковый процессор, используемый в модеме для системы связи с расширенным спектром, буферизирует в буфере выборки принимаемых сигналов и использует процессор преобразования с квантованием времени, работающий с последовательными сдвигами по отношению к буферу. Поисковый процессор осуществляет пошаговый автономный поиск, конфигурируемый микропроцессором, в котором определен набор параметров поиска, который может включать группу антенн для поиска, начальный сдвиг и ширину поискового окна для проведения поиска и количество символов Уолша для накопления результатов на каждом сдвиге. Поисковый процессор вычисляет энергию корреляции на каждом сдвиге и представляет итоговый список наилучших трасс распространения сигналов, обнаруженных в процессе поиска, для использования их при расширении элементов демодуляции, что является техническим результатом. Поиск выполняется линейным образом независимо от вероятности того, что искомый сигнал передавался в любой данный момент времени. 2 с.п. ф-лы, 15 ил.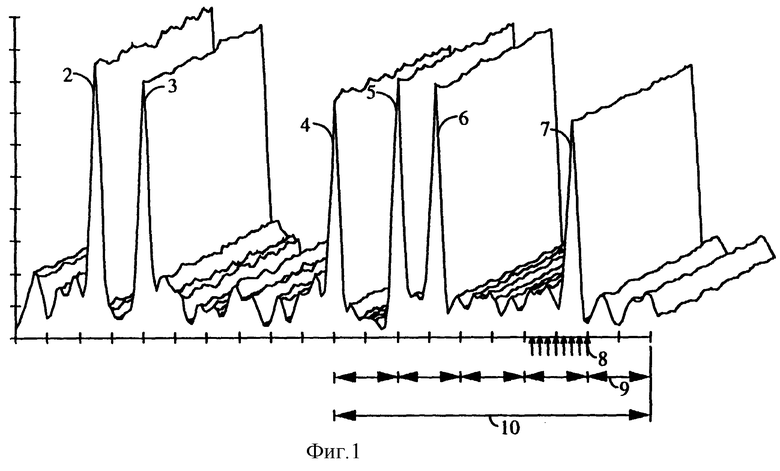
| US 4901307 A, 13.02.1990 | |||
| Система радиосвязи с доступом по запросу | 1986 |
|
SU1411985A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| ТЕПЛОВАЯ ЭЛЕКТРИЧЕСКАЯ СТАНЦИЯ | 2005 |
|
RU2278983C1 |

