Данное изобретение касается измерения давления и, в частности, передачи сигналов, характеризующих две переменные через один аналого-цифровой преобразователь с минимальной потерей информации и минимальными искажающими погрешностями. Более конкретно, данное изобретение касается корректировки выходного сигнала измерительной схемы на погрешности в сигнале разности давлений, вызванные изменениями линейного давления или температуры на сенсоре разности давлений, и корректировки выходного сигнала на погрешности в сигнале линейного или статического давления, вызванные изменением температуры.
Емкостные сенсоры разности давлений включают в себя, как правило, корпус сенсора, содержащий внутреннюю камеру, разделенную на две полости отклоняемой диафрагмой. Первое давление создается в первой полости, а второе - во второй. Разность между первым и вторым давлениями вынуждает диафрагму отклоняться, причем степень отклонения зависит от величины разности давлений.
Диафрагма, как правило, содержит проводящую часть, которая отделена от проводящих частей на внутренних стенках полостей и соосна им, образуя соответственно первый и второй переменные конденсаторы внутри первой и второй полостей. Когда диафрагма отклоняется под действием разности давлений, величины емкости двух переменных конденсаторов изменяются. Сенсор давления подсоединен к измерительной схеме для выработки выходного сигнала, характеризующего величины емкости переменных конденсаторов.
Этот выходной сигнал обеспечивает измерение разности давлений.
Однако проблема возникает из-за нелинейностей в емкостном сенсоре давления. Например, нелинейности в системе могут быть обусловлены паразитарными емкостями, которые необходимо компенсировать.
Кроме того, ошибки могут возникать из-за изменений линейного давления. Линейное давление, также часто называемое статическим давлением, можно определять несколькими способами. Для иллюстрации различных методик определения линейного давления допустим, что первое и второе давления в первой и второй полостях емкостного сенсора давления имеют соответственно величину 2990 фунтов на кв. дюйм (PL) и 3000 фунтов на кв. дюйм (PH), создавая разность давлений величиной 10 фунтов на кв. дюйм (3000 - 2990). По одному способу линейное давление измеряется как средняя величина PH и PL, или в данном примере 2995 фунтов на кв. дюйм. По другому способу линейное давление измеряется просто как отдельно PH или PL. Независимо от вида определения линейного давления, погрешности выходного сигнала сенсора давления могут возникать из-за изменений линейного давления.
Влияние изменений линейного давления на емкостной сенсор разности давлений может быть проиллюстрировано следующими примерами. Если PH = 3000 фунтов на кв. дюйм и PL = 2990 фунтов на кв. дюйм, разность давлений составляет 10 фунтов на кв. дюйм, а линейное давление 2995 фунтов на кв. дюйм (при использовании средней величины от PH и PL в качестве меры линейного давления). Однако, если PH = 10 фунтов на кв. дюйм, а PL = 0 фунтов на кв. дюйм, разность давлений все равно будет составлять 10 фунтов на кв. дюйм, но линейное давление будет 5 фунтов на кв. дюйм. Под влиянием определенных напряжений на корпусе сенсора давления выходной сигнал типичного сенсора разности давлений может колебаться в пределах 1% на каждые 1000 фунтов на кв. дюйм изменения линейного давления. Следовательно, из приведенных выше примеров видно, что выходной сигнал разности давлений может существенно меняться при изменении линейного давления. Представляется желательным измерять разность давлений и вырабатывать выходной сигнал, на который не влияют изменения линейного давления.
В патенте США N 4370890 на имя Фрика, выданном 1.02.83 и принадлежащем настоящему заявителю, раскрывается конструктивное выполнение емкостного сенсора разности давлений, в котором сделана попытка компенсировать нежелательные механические напряжения на корпусе емкостного сенсора давления, вызванные изменениями линейного давления. Конструктивное выполнение, предложенное Фриком, уменьшает колебания выходного сигнала сенсора разности давлений, вызванные изменением линейного давления. Однако, все еще существует необходимость в способе корректировки колебаний выходного сигнала, вызванных изменениями линейного давления, который можно было бы осуществлять не механическими, а электрическими средствами.
Находящаяся на рассмотрении заявка Фрика N 7-667320, поданная 8.03.91 и принадлежащая настоящему заявителю, на которую был выдан патент США N 5163326, опубликованный 17 ноября 1992 г., описывает использование компенсирующих конденсаторов постоянной емкости с переменными конденсаторами сенсора разности давлений таким образом, что токи, протекающие через компенсирующие конденсаторы, вычитаются из токов, протекающих через переменные конденсаторы. Значения емкости компенсирующих конденсаторов выбираются таким образом, чтобы компенсировать выход схемы до нуля и погрешности диапазона, вызванные изменениями линейного давления. Использование компенсирующих конденсаторов постоянной емкости ограничено ожидаемым рабочим диапазоном сенсора и может удовлетворять не все условия. Следовательно, остается необходимость в усовершенствованном способе корректировки.
В патенте США N 4791352, авторы - Фрик и др., описан передатчик для выдачи выходного сигнала, отображающего измеренный параметр с использованием идеи генерирования сигналов, содержащих "пакеты заряда". Термин "пакет" относится к дискретной величине электрического заряда, который протекает в емкость или из нее, когда она заряжается от первого потенциала до второго потенциала, отличающегося от первого потенциала. Величина заряда в пакете пропорциональна емкости и разности между первым и вторым потенциалами. Сигнал, содержащий пакеты или заряд, подается на средство измерения в передатчике, которое накапливает пикеты заряда и выдает сигнал измерения в виде функции накопленного заряда. Сигнал измерения подается в средство обратной связи в передатчике и управляет этим средством. Средство обратной связи подает сигналы обратной связи в средство генерирования для управления схемой коммутации с целью генерирования пакетов заряда.
Схема коммутации для средства генерирования включает в себя выключатели для приложения отличающихся разностей потенциалов или потенциалов возбуждения к емкости, чтобы изменять размер пакетов независимо от величины емкости. В течение первого интервала времени прикладывается больший потенциал возбуждения чтобы генерировать большие пакеты заряда и таким образом обеспечить грубое измерение величины заряда, накопленного средством измерения. В течение второго интервала времени, отличающегося от первого интервала времени, прикладывается меньший потенциал возбуждения, чтобы генерировать меньшие пакеты заряда и таким образом обеспечить точное измерение величины заряда, накопленного средством измерения. Средство обратной связи подсчитывает количества больших и меньших пакетов заряда и выдает сигнал, отображающий количества больших и меньших пакетов заряда во время работы выходного средства, которое подает выходной сигнал, отображающий параметр, в средство считывания.
В одном устройстве, описанном в патенте США N 4791352, этим параметром является давление. Передатчик включает в себя первый и второй конденсаторы переменной емкости, каждый из которых имеет емкость, которая является функцией определяемого давления. Кроме того, передатчик включает в себя первый и второй конденсаторы коррекции линейности, которые компенсируют генерирующее средство на величину паразитных емкостей, связанных с первым и вторым конденсаторами переменной емкости. Первый конденсатор коррекции линейности остается соединенным в оперативной взаимосвязи с первым конденсатором переменной емкости, тогда как второй конденсатор коррекции линейности остается соединенным в оперативной взаимосвязи со вторым конденсатором переменной емкости. Однако, чтобы облегчить приложение большего и меньшего потенциалов возбуждения к конденсаторам для генерирования пакетов заряда, предусмотрены выключатели между каждым конденсатором переменной емкости и связанным с ним конденсатором коррекции линейности. Коммутацией схемы коммутации управляют таким образом, что больший потенциал возбуждения прикладывается одновременно к конденсатору переменной емкости и связанному с ним конденсатору коррекции линейности, а затем меньший потенциал возбуждения прикладывается одновременно к конденсатору переменной емкости и связанному с ним конденсатору коррекции линейности.
В патенте США N 4598381, автор - Гуччи, описан сенсор разности давлений, который измеряет разность давлений между опорным давлением и другим давлением для выдачи сигнала сенсора разности, отображающего разность давлений. Сигнал сенсора разности и опорный сигнал, отображающий опорное давление, выдаются в схему корректировки, предпочтительно - цифровую ЭВМ, которая регулирует опорный сигнал и выдает улучшенный выходной сигнал в виде функции сигнала сенсора разности и отрегулированного опорного сигнала. Схема корректировки выполняет программы, реализуемые с помощью программного или аппаратного обеспечения. Эти программы могут содержать функции, такие, как подходящая таблица преобразования или полиномиальная функция для регулировки опорного сигнала как функции опорного сигнала и сигнала температуры и регулировки сигнала сенсора разности как функции опорного сигнала, сигнала температуры и сигнала сенсора разности для выдачи существенно откорректированного выходного сигнала. Функция, реализуемая схемой корректировки, может содержать следующий полиномиальный ряд:
Q = а + bx + cx2 + ...
В патенте США N 4878012 (авторы - Шулте и др.) описан передатчик, относящийся к типу со сбалансированной по заряду обратной связью, который генерирует пакеты заряда, отображающие измеренный параметр. Между реактивным сопротивлением генерирования пакетов заряда, и интегратором подсоединено сопротивление, чтобы уменьшить влияние шума, вызванного переходными процессами коммутации и шумом заземления, который подается на схему генерирования пакетов заряда паразитной емкостью. Также предусмотрены конденсаторы коррекции линейности, чтобы скомпенсировать паразитную емкость.
Другой вид сенсора давления - это пьезорезистивный мостовой сенсор, как правило, использующий мостовую схему из четырех пьезорезистивных элементов, сформированных на одной кремниевой пластине. Эти пьезорезистивные элементы расположены таким образом, что давление, прикладываемое к диафрагме в пластине, разбалансирует значения удельного сопротивления моста. Два давления P1 и P2 влияют на противоположные стороны диафрагмы, создавая разность давлений на пьезорезистивных элементах. Изменения разности давлений изменяют импеданс двух диаметрально противоположных пьезорезистивных элементов моста одним образом и изменяют импеданс двух других диаметрально противоположных пьезорезистивных элементов противоположным образом (например, изменяя импеданс пьезорезистивных элементов R5 и R6 на фигуре 4 положительно, а импеданс пьезорезистивных элементов R7 и R8 отрицательно). Полученный из моста выходной сигнал характеризует разность давлений.
В случае использования пьезорезистивного моста для измерения линейного давления (манометрического или абсолютного давления), изменения давления, прикладываемого к пластине, как правило, изменяют импедансы двух противоположных пьезорезистивных элементов положительно, а импедансы двух других противоположных пьезорезистивных элементов отрицательно. Величина изменения импеданса каждого пьезорезистивного элемента характеризует линейное давление.
(Специалистам в данной области техники будет понятно, что в качестве пьезорезистивных мостов могут быть использованы полумосты, содержащие только два пьезорезистивных элемента. Пьезорезистивные элементы моста для измерения разности давления будут реагировать на разность давлений, изменяя импеданс одного пьезорезистивного элемента положительно, а импеданс другого пьезорезистивного элемента - отрицательно. Пьезорезистивные элементы моста для измерения линейного давления будут реагировать на линейное давление, изменяя импеданс одного пьезорезистивного элемента положительно, а импеданс другого пьезорезистивного элемента - отрицательно. В большинстве современных пьезорезистивных мостов используется четыре пьезорезистивных элемента из экономических соображений).
Пьезорезистивные мосты для измерения разности давлений, реагируют на изменение разности давлений, а также на линейное давление и температуру. Пьезорезистивные мосты для измерения линейного давления реагируют на изменения линейного давления и температуры. Это является результатом нежелательных механических напряжений, влияющих на пьезорезистивные элементы на пластине под действием изменений линейного давления и температуры, а также результатом нежелательных изменений удельного сопротивления пьезорезистивных элементов под действием изменений температуры. Такие напряжения и изменения удельного сопротивления отрицательно сказываются на выходных сигналах моста. Поэтому было принято устанавливать отдельный температурный сенсор для моста для измерения линейного давления и отдельный мост для измерения линейного давления и температурный сенсор для моста для измерения разности давлений. Выходной сигнал моста для измерения разности давлений обрабатывался с выходными сигналами температурного сенсора и моста для измерения линейного давления, чтобы рассчитать скорректированную разность давлений. Выходной сигнал моста для измерения линейного давления обрабатывался с выходным сигналом температурного сенсора, чтобы рассчитать скорректированное линейное давление. Каждый сенсор требовал использования собственного аналого-цифрового преобразователя, так что корректировка показаний моста для измерения линейного давления требовала использования двух преобразователей, а корректировка показаний моста для измерения разности давлений требовала использования трех преобразователей, при этом каждый преобразователь обеспечивал входной сигнал от сенсора в процессор. Чтобы исключить необходимость использования двух или трех преобразователей, иногда использовалась мультиплексирующая (уплотняющая) технология, чтобы переменно подсоединять отдельные выходы сенсора к одному преобразователю, но недостатком мультиплексирования является то, что переменная передача информационных сигналов от нескольких сенсоров к преобразователю ведет к потере информации из-за искажающих погрешностей.
Сущность изобретения
В данном изобретении сенсор давления содержит первое и второе сенсорные средства, каждое из которых имеет значение импеданса, которое изменяется с изменением давления, а также с изменением другого переменного внешнего условия, на которое необходимо сделать корректировку. Этим другим переменным внешним условием может быть линейное давление (если это сенсор разности давлений), или температура (если это либо сенсор разности давлений, либо сенсор линейного давления). Постоянный импеданс переменно подсоединяется в рабочую связь с первым и вторым сенсорными средствами, чтобы получить первый и второй сигналы, каждый из которых представляет собой разную функцию контролируемой переменной и переменной, в отношении которой делается корректировка.
Более конкретно, первый и второй сигналы вырабатываются во время первого и второго циклов корректировки, и основаны на совокупном действительном импедансе первого и второго сенсорных средств и средства с постоянным импедансом в первой и второй конфигурациях схемы. В первой конфигурации схемы средство с постоянным импедансом пропускает сигнал, который изменяет сигналы, пропускаемые первым сенсорным средством, в то время как во второй конфигурации схемы средство с постоянным импедансом пропускает сигнал, который изменяет сигналы, пропускаемые вторым сенсорным средством. Схема корректировки реагирует на первый и второй сигналы для расчета величины контролируемой скорректированной переменной.
В предпочтительном варианте изобретения измеряемым давлением является разность давлений и схема корректировки рассчитывает разность давлений, скорректированную с учетом изменений линейного давления. Первый и второй сигналы являются функциями разности давлений и линейного давления. Схема корректировки обрабатывает первый и второй сигналы в соответствии с многочленными рядами или на основании таблицы преобразований, чтобы получить сигнал разности давлений, скорректированный с учетом изменений линейного давления.
В предпочтительном варианте изобретения сенсором разности давления является также емкостной сенсор давления, содержащий первое и второе емкостные сенсорные средства, реагирующие на первое и второе давления, чтобы выработать выходной сигнал, характеризующий разность давлений. Средство с постоянным импедансом представляет собой конденсатор постоянной емкости, величина емкости которого не изменяется в ответ на изменения линейного давления. Соединительное средство переменно соединяет этот постоянный конденсатор в рабочую связь соответственно с первым и вторым емкостными сенсорными средствами.
Согласно одному из вариантов изобретения, схема корректировки выдает сигнал разности давлений, скорректированный с учетом изменений температуры. В этом варианте средство с постоянным импедансом имеет температурный коэффициент, отличающийся от температурного коэффициента первого и второго емкостных сенсорных средств. Эти первый и второй сигналы являются функциями разности давлений и температуры и обрабатываются схемой корректировки в соответствии с многочисленными рядами или на основании таблицы преобразований, чтобы получить сигнал разности давлений, скорректированный с учетом изменений температуры.
Согласно другому варианту изобретения сенсором разности давлений является пьезорезистивный мостовой сенсор, содержащий первый и второй пьезорезистивные элементы, каждый из которых разным образом реагирует на разность давлений, выдавая выходной сигнал моста, характеризующий разность давлений. Средством с постоянным импедансом является постоянное сопротивление, величина сопротивления которого не изменяется в ответ на изменения линейного давления. Предпочтительно, постоянное сопротивление имеет температурный коэффициент, соответствующий температурному коэффициенту первого и второго пьезорезистивных элементов.
Согласно следующему варианту изобретения, измеряемым давлением является линейное давление, и схема корректировки рассчитывает линейное давление, скорректированное с учетом изменений температуры. В этом варианте сенсором давления является пьезорезистивный мостовой сенсор, содержащий первый и второй пьезорезистивные элементы, каждый из которых разным образом реагирует на линейное давление, выдавая мостовой выходной сигнал, характеризующий линейное давление. Средством с постоянным импедансом является постоянное сопротивление, имеющее температурный коэффициент, отличающийся от температурного коэффициента первого и второго пьезорезистивных элементов. Первый и второй сигналы являются функциями линейного давления и температуры и обрабатываются схемой корректировки в соответствии с многочисленными рядами или на основании таблицы преобразований, чтобы получить сигнал линейного давления, скорректированный с учетом изменений температуры.
Краткое описание чертежей
фиг. 1 - схема известного сенсора разности давлений,
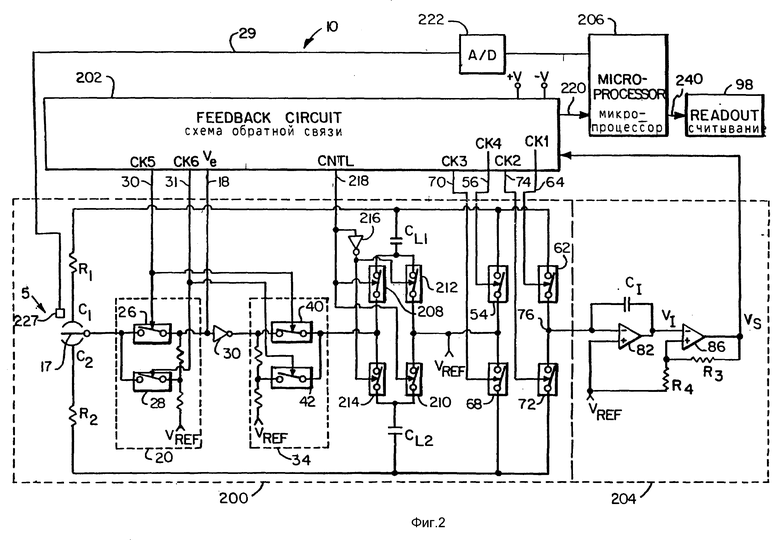
фиг. 2 - блок-схема сенсора разности давлений с предпочтительным вариантом измерительной схемы, воплощающей технологию корректировки согласно изобретению;
фиг. 3 - схема синхронизации для схемы, изображенной на фиг. 2;
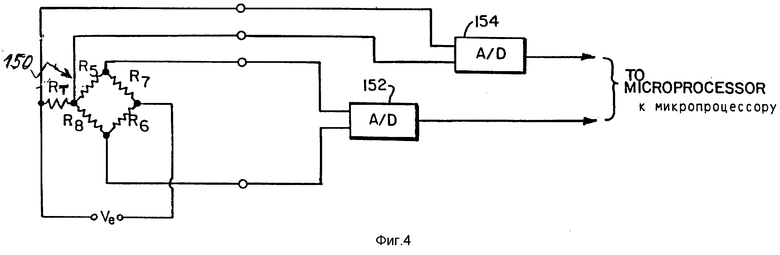
фиг. 4 - блок-схема пьезорезистивного мостового сенсора и измерительной схемы, предназначенной для измерения разности давлений или линейного давления, вместе с известным температурным сенсором, предназначенным для измерения температуры; и
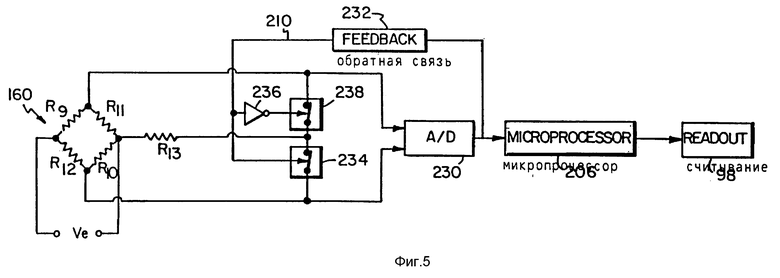
фиг. 5 - блок-схема варианта данного изобретения, изображающая пьезорезистивный мостовой сенсор и измерительную схему, предназначенную для измерения либо разности давлений, либо линейного давления, воплощающая технологию корректировки согласно данному изобретению.
Подробное описание предпочтительных вариантов
На фиг. 1 изображен обычный емкостный сенсор разности давлений 5, который включает в себя корпус 7 с внутренней камерой 9, заполненной маслом, имеющим диэлектрический коэффициент GR. Внутренняя камера 9 разделена на первую и вторую полости 11 и 13 диафрагмой 15. Диафрагма 15 содержит электропроводящую часть 17, которая, как правило, соосна проводящим участкам 19 и 21 соответственно на внутренних поверхностях полостей 11 и 13, но отделена от них.
Проводящие участки 17 и 19 образуют две пластины первого переменного конденсатора C1, разделенные в районе своих центров на расстояние X1, а проводящие участки 17 и 21 образуют две пластины второго переменного конденсатора C2, разделенные в районе своих центров на расстояние X2. Текучая среда под давлением, показанная стрелками P1 и P2, подается с помощью любых подходящих средств 23 и 25 в полости 11 и 13.
Предпочтительно, температурный сенсор 227 расположен в корпусе 7 или вблизи него, чтобы определять температуру внутри корпуса сенсора разности давлений. Сенсор 227 вырабатывает аналоговый выходной сигнал на линии 29 для целей, которые будут пояснены ниже.
В зависимости от разницы между давлениями P1 и P2 диафрагма 15 внутри камеры 9 отклоняется либо к пластине 19, либо к пластине 21. Это отклонение вызывает изменение величин реактивного импеданса или емкости переменных конденсаторов C1 и C2. Сенсор 5, когда он приводится в действие измерительной схемой, вырабатывает входной сигнал, характеризующий величины емкости переменных конденсаторов C1 и C2 и паразитные емкости сенсора, схематически изображенные как Cs1 и Cs2. Измерительная схема обеспечивает показания разности давлений на основании этого выходного сигнала.
Однако изменения линейного давления, приложенного к емкостному сенсору давления 5, создают напряжения на корпусе 7. Например, повышенное напряжение, вызванное увеличением линейного давления, вызывает незначительное расширение корпуса сенсора, увеличивая таким образом расстояние X1 и X2 между пластинами конденсатора и вызывая уменьшение значений емкости переменных конденсаторов C1 и C2. Это вызывает погрешности выходного сигнала емкостного сенсора давления 5.
Было обнаружено, что такое влияние линейного давления на выходной сигнал емкостного сенсора разности давлений имеет значительный размер. В таких сенсорах изменение линейного давления вызывает деформацию корпуса сенсора, а также изменение характеристик реакции центральной диафрагмы сенсора на давление. Эти эффекты вызывают изменения соотношения значений реактивного импеданса или емкости переменных конденсаторов C1 и C2. Следовательно, возникают погрешности выходного сигнала.
Например, в некоторых сенсорах давления погрешности диапазона вызывают изменение выходного сигнала на приблизительно 1% в диапазоне инструмента на каждые 1000 фунтов на кв. дюйм изменения линейного давления. Аналогичные нулевые погрешности встречаются в выходном сигнале при низкой или нулевой разности давлений, когда изменяется линейное давление.
Данное изобретение включает измерительную схему, изображенную на фиг. 2, для корректировки погрешности линейного давления в сигнале разности давлений за счет переменного и последовательного подсоединения компенсирующего импеданса к переменным конденсаторам C1 и C2 сенсора разности давлений. В результате этого получают отдельный сигнал из чисел зарядовых пакетов на основании значений емкости во время каждого последовательного переменного подсоединения. Эти отдельные сигналы имеют разные математические соотношения друг с другом, а также с разностью давлений и линейным давлением. Отдельные сигналы обрабатываются, чтобы получить сигнал разности давлений, скорректированный с учетом изменений линейного давления.
Передаточная функция fт, используемая в сенсорах разности давлений, например сенсоре 5, может быть выражена как отношение значений емкости конденсаторов C1 и С2 и прямо пропорциональна разности давлений ΔP . Коэффициент передаточной функции может быть выражен следующим образом
Уравн. 1
где K1 и K2 - термины компенсатора линейного давления; K1 компенсирует нулевые погрешности, а К2 компенсирует погрешности диапазона. Далее
Уравн. 2
K1 = CL1 - CL2;
K2 = CL1 + CL2;
где CL1 и CL2 конденсаторы постоянной емкости, которые не изменяются с изменением линейного давления. В упомянутой выше заявке Фрика в США компенсация нулевой погрешности (К1) корректируется за счет регулирования значений емкости CL1 и CL2 как
Уравн. 3
где CS1 и CS2 значения паразитной емкости в сенсоре, а ΔC - поправочный коэффициент на статическое или линейное давление. Аналогично осуществляется регулирование компенсации погрешности диапазона (К2); компенсация нулевой погрешности и компенсация погрешности диапазона могут регулироваться одновременно. В данном изобретении применяется корректировка на линейное давление с помощью цифровой обработки сигналов, а не за счет выбранных компенсирующих конденсаторов, хотя можно применять оба этих способа.
Как показано на фиг. 1, корпус 5 емкостного конденсатора внутри симметричен относительно центральной диафрагмы 15, разделяющей таким образом внутреннюю камеру на две практически равные полости 11 и 13 для определения давления. При таком конструктивном выполнении паразитные емкости CS1 и CS2 приблизительно равны. В предпочтительном варианте изобретения конденсатор CL1 оперативно подсоединен к переменному конденсатору C1 и его паразитной емкости CS1 во время первого цикла корректировки или итерации, а конденсатор CL2 оперативно подсоединен к переменному конденсатору C2 и его паразитной емкости CS2 во время второго цикла корректировки или итерации, причем эти соединения последовательно чередуются между первым и вторым циклами корректировки. В данном изобретении предпочтительно, чтобы конденсаторы CL1 и CL2 были равны друг другу и удвоенной отдельной паразитной емкости CS1 и CS2, чтобы компенсировать таким образом паразитную емкость:
Уравн. 4
CL1 = CL2 - CS1 + CS2.
Размеры емкости компенсирующих конденсаторов CL1 и CL2 выбираются таким образом из-за того, что работа схемы требует, чтобы каждый компенсирующий конденсатор приблизительно вдвое превышал отдельную паразитную емкость, и из-за того, что две паразитные емкости приблизительно равны.
На фиг. 2 показан предпочтительный вариант передатчика обратной связи 10 со сбалансированным зарядом, работающего по методике компенсации согласно данному изобретению. Передатчик 10 предназначен для использования с емкостным сенсором разности давлений.
Схема генератора зарядовых пакетов 200 генерирует величины или пакеты заряда, характеризующего емкость переменных конденсаторов C1 и C2, и передает эти пакеты заряда на узел 76 на входе в схему интеграции и сравнения 14. Схема обратной связи 202 обеспечивает заряжающее напряжение Ve синхронизацию синхросигналов СК1-СК6 для рабочих переключателей 54, 62, 68 и 72 и переключателей в верньерных схемах 20 и 34, чтобы генерировать зарядовые пакеты и передавать их на узел 76, как это более подробно описано в патенте Фрика и др.
Согласно данному изобретению схема обратной связи 202 дополнительно выдает управляющий сигнал CNTL на проводе 218, чтобы приводить в действие переключатели 208 и 210, а также выключатели 212 и 214 через инвертор 219, как это будет описано со ссылкой на фиг. 3.
Схема интеграции и сравнения 204 содержит интегратор, состоящий из усилителя 82 и конденсатора C1, и компаратор 86, имеющий гистерезисную схему, содержащую сопротивления R3 и R4. Заряд аккумулируется в узле 76 и интегрируется в аналоговый сигнал интегратором. Компаратор 86 сравнивает сигнал от интегратора с эталонным сигналом и вырабатывает выходной цифровой измерительный сигнал VS, характеризующий накопленный заряд на конденсаторе C1 интегратора.
Выходной сигнал VS передается как входной на схему обратной связи 202. Схема обратной связи 202 дополнительно содержит логику, обеспечивающую управляющий сигнал CNTL на проводе 218. На фиг. 3 изображена взаимосвязь синхронизирующих сигналов СК1-СК2, управляющего сигнала CNTL и уровней заряжающего напряжения Ve, выходного напряжения V1 усилителя 62, выходного сигнала VS схемы интеграции и сравнения 204.
Передатчик 10 устанавливает первый временной интервал, во время которого производятся предварительные или грубые измерения, и второй временной интервал, во время которого осуществляются верньерные или точные измерения. В течение первого временного интервала сигнал СК5 на проводе 30 замыкает выключатели 26 и 40 в верньерных схемах 20 и 34, чтобы приложить полное напряжение возбуждения Ve к пластине 17 емкостного сенсора и через инвертор 30 к конденсаторам CL1 и CL2. Во время второго временного интервала сигнал СК6 на проводе 31 замыкает выключатели 28 и 42 в верньерных схемах, разделяя таким образом напряжение возбуждения на напряжение, проходящее через верньерную схему 20 к емкостному сенсору 5 и проходящее через инвертор 30 и верньерную схему 34 к конденсаторам CL2 и CL2. Согласно данному изобретению дополнительно обеспечиваются многократные последовательные корректировки или итерации, во время которых в первом и во втором временных интервалах производятся грубое и точное измерение разности давлений. Во время первого цикла корректировки или итерации выключатели 208 и 210 разомкнуты, а выключатели 212 и 214 замкнуты. Во время второго цикла корректировки выключатели 208 и 210 замкнуты, а выключатели 212 и 214 разомкнуты.
Чтобы пояснить схему, изображенную на фиг. 2, и график синхронизации на фиг. 3, допустим, что измерительная схема находится на стадии первой корректировки или итерации, при которой выключатели 212 и 214 замкнуты, а выключатели 208 и 210 разомкнуты, и допустим также, что эта схема работает в первом временном интервале, когда сигнал СК5 замыкает выключатели 26 и 40, чтобы произвести грубые измерения. Сигнал СК3 на проводе 70 от схемы обратной связи 202 замыкает выключатель 68, сохраняя таким образом пакеты заряда на конденсаторах C2 и CL2. После изменения полярности напряжения возбуждения Ve на проводе 18 сигнал СК4 на проводе 56 замыкает выключатель 54, чтобы сохранить пакеты заряда на конденсаторе C1. (Конденсатор CL1 эффективно изолирован от схемы за счет того, что выключатель 208 разомкнут, а выключатели 54 и 212 замкнуты). После повторного изменения полярности напряжения возбуждения Ve сигналы СК1 и СК3 на проводах 64 и 70 замыкают соответственно выключатели 62 и 68. Выключатель 62 передает пакет заряда от конденсатора C1 на узел 76 и схему интеграции и сравнения 204. При замкнутом выключателе 68 пакеты заряда хранятся на конденсаторах C2 и CL2. После следующего изменения полярности напряжения возбуждения Ve сигнал СК4 приводит в действие выключатель 54, чтобы сохранить пакеты заряда на конденсаторе C1, и сигнал СК2 приводит в действие выключатель 72, чтобы передать пакет заряда от конденсаторов C2 и CL2 схему интеграции и сравнения 204.
Аналогичным образом эта схема работает и во время второго временного интервала, когда происходят верньерные или точные измерения, за исключением того, что напряжение возбуждения Ve получают через делители напряжения в верньерных схемах 20 и 34, и оно низкое.
Схема интеграции и сравнения 204 реагирует на пакеты заряда, принятые от узла 76, вырабатывая выходной сигнал VS.
Как изображено на фиг. 3, во время первого цикла итерации или корректировки измерения сенсора 5 сигнал CNTL на проводе 218 находится в первом состоянии, размыкая выключатели 208 и 210 и через инвертор 216 замыкая выключатели 212 и 214. Таким образом, во время первого цикла корректировки конденсатор CL1 эффективно выведен из схемы, а конденсатор CL2 эффективно включен в нее. Во время второго цикла корректировки сигнал CNTL находится во втором состоянии и условия выключателей 208-214 изменены на обратные, так что конденсатор эффективно выведен из схемы, а конденсатор CL1 эффективно в нее включен. Выключатели 208-214 переменно подсоединяют конденсатор CL1 в рабочую связь с конденсатором C1, а конденсатор CL2 в рабочую связь с конденсатором C2. Следовательно, компенсирующие конденсаторы постоянной емкости последовательно включаются в рабочую связь с конденсаторами C1 и C2 во время последовательных корректировок или итераций. Во время соответственно первого и второго циклов корректировки, когда соответствующий конденсатор постоянной емкости CL1 или CL2 находится в рабочей связи с соответствующим сенсорным конденсатором C1 или C2, соответствующий конденсатор постоянной емкости CL1 или C2 заряжается противоположно заряду соответствующего сенсорного конденсатора C1 или C2 благодаря инвертору 30. Следовательно, токи, проходящие через конденсаторы постоянной емкости CL1 и CL2, противоположны токам, проходящим через сенсорные конденсаторы C1 и C2, а соответственно и их паразитные емкости. Таким образом, токи, протекающие через конденсаторы постоянной емкости CL1 и CL2 алгебраически суммируются с токами, протекающими через сенсорные конденсаторы C1 и C2, и их паразитными емкостями, или вычитаются из них.
Зарядовые пакеты из конденсаторов C1, C2, CL1 и CL2 передаются на узел 76 и аккумулируются в нем, чтобы выработать выходной сигнал VS из схемы интеграции и сравнения 204. Выходной сигнал VS приводит в действие логику в схеме обратной связи 202, чтобы подсчитать импульсы на линиях 64 и 74, и, таким образом, подсчитать число зарядовых пакетов, аккумулированных в узле 76. Числа N1 и N2, характеризующие число зарядовых пакетов противоположной полярности, накапливаются во время первого интервала времени (грубое измерение), а числа N3 и N4 накапливаются во время второго интервала времени (точное из- мерение). Таким образом, число N1 - это количество зарядовых пакетов первой полярности, поступающих от конденсаторов C1 и CL1 во время первого интервала времени, число N2 - это количество зарядовых пакетов второй полярности, противоположной первой, поступивших от конденсаторов C2 и CL2 во время первого интервала времени, число N3 - это количество зарядовых пакетов первой полярности, поступивших от конденсаторов C1 и CL1 во время второго интервала времени, и число N4 - это количество зарядовых пакетов второй полярности, поступивших от конденсаторов C2 и CL2 во время второго интервала времени. Зарядовые пакеты накапливаются в узле 76 при тенденции и сбалансированному состоянию зарядов. Числа N1 и N2 на линиях 64 и 74 во время первого интервала времени являются функцией разности давлений, определенной сенсором 5, и числа N3 и N4 на линиях 64 и 74 также являются функцией разности напряжений, определенной сенсором 5. Микропроцессор 206 рассчитывает разность напряжений, используя числа N1 и N2 и числа N3 и N4 через линию 220. Как будет пояснено ниже, числа N1 и N2, а также числа N3 и N4 могут отличаться во время каждого цикла корректировки или итерации, при этом их разность является функцией статического или линейного давления. Микропроцессор 206 корректирует сигнал разности давлений на основании соотношений N1 и N2 и соотношений N3 и N4 во время последовательных итераций и вырабатывает выходной сигнал для схемы считывания 98, который характеризует разность давлений. Схема считывания 98 обеспечивает считывание и/или управление по потребности.
Общее количество чисел N1 и N2 постоянно для каждого интервала времени. Следовательно  и
и  где К11 и K12 - константы. Логика в схеме обратной связи 202 реагирует на N3 + N4 = К12, чтобы изменить состояние управляющего сигнала CNTL на линии 218, изменив на обратное состояние выключателей 208, 210, 212 и 214. Следовательно, устройство согласно данному изобретению изменяет первый и второй циклы корректировки после завершения каждого второго интервала времени. Для данного изобретения не является существенным определение, какой цикл корректировки использует конденсатор CL1 и какой цикл использует конденсатор CL2. Важно только, чтобы микропроцессор 206 обрабатывал числа N1 и N2 (и/или N3 и N4) во время разных циклов корректировки. Микропроцессор обрабатывает сигналы, характеризующие каждый цикл корректировки, используя многочлены или таблицу преобразований, как описывается в данной заявке.
где К11 и K12 - константы. Логика в схеме обратной связи 202 реагирует на N3 + N4 = К12, чтобы изменить состояние управляющего сигнала CNTL на линии 218, изменив на обратное состояние выключателей 208, 210, 212 и 214. Следовательно, устройство согласно данному изобретению изменяет первый и второй циклы корректировки после завершения каждого второго интервала времени. Для данного изобретения не является существенным определение, какой цикл корректировки использует конденсатор CL1 и какой цикл использует конденсатор CL2. Важно только, чтобы микропроцессор 206 обрабатывал числа N1 и N2 (и/или N3 и N4) во время разных циклов корректировки. Микропроцессор обрабатывает сигналы, характеризующие каждый цикл корректировки, используя многочлены или таблицу преобразований, как описывается в данной заявке.
Как было описано выше, числа N1, N2, N3 и N4 могут быть разными во время каждого цикла корректировки, но суммы К11 и К12 постоянны во время каждого цикла корректировки. Это показано на фиг. 3, где во время первого цикла корректировки N1 = 2 и N2 = 6 (K11 = 8) и во время второго цикла корректировки N1 = 3 и N2 = 5 (K11 = 8). Аналогично, во время первого цикла корректировки N3 = 0 и N4 = 2 (К12 = 2) и во время второго цикла корректировки N3 = 0 и N4 = 2 (К12 = 2). (При этом следует понимать, что пример К11 = 8 и К12 = 2 приводится в целях объяснения изобретения, и что на практике константы К11 и К12 могут быть равны сотням или даже тысячам).
Конденсаторы CL1 и CL2 переменно включаются в рабочую связь с конденсаторами C1 и C2, так, что токи, протекающие через конденсаторы CL1 и CL2, вычитаются из токов, протекающих через сенсорные конденсаторы C1 и C2, во время последовательных циклов корректировки или итераций. В результате этого сенсор и фиксированные конденсаторы проявляют разные соотношения с числами зарядовых пакетов во время каждого цикла корректировки, эти соотношения можно выразить следующим образом:
Уравн. 5
N1(C1 - CL2) = N2C2
для первого цикла корректировки, и
Уравн. 6
N1C1 = N2(C2 - CL2)
для второго цикла корректировки, где CL = CL1 = CL2 ≈ CS1 + CS2.
Чтобы удовлетворить уравнения 5 и 6, согласно данному изобретению конденсатор постоянной емкости переменно подсоединяется в рабочую связь к сенсорным конденсаторам C1 и C2 во время каждого цикла корректировки или итерации. Может быть использован один или несколько конденсаторов постоянной емкости, и (если используется несколько постоянных конденсаторов) они могут быть равны или неравны друг другу. Кроме того, конденсаторы постоянной емкости могут электрически подключаться к схеме и выключаться, или могут быть установлены фиксированным монтажом в нее и электрически изолироваться, когда они не требуются. Конденсаторы постоянной емкости могут также служить для компенсации паразитной емкости в сенсоре. В варианте, показанном на фиг. 2, имеется два конденсатора постоянной емкости, равных по величине емкости и электрически включаемых в схему и выключаемых из нее. Величина емкости каждого конденсатора постоянной емкости равна удвоенной паразитной емкости CS1 или CS2 (причем CS1 приблизительно равна CS2), чтобы компенсировать паразитную емкость.
Конденсаторы CL1 и CL2 переменно включаются в рабочую связь с переменными конденсаторами C1 и C2 при частоте повторения импульсов сигнала CNTL, который изменяет бинарную величину сразу после начала первого интервала времени каждой корректировки или итерации измерений сенсора. Требуется минимум два цикла корректировки для получения сигнала разности давлений.
Нескорректированная разность давлений ΔP (нескорректированная на линейное давление) является функцией средней величины выходных сигналов схемы по фиг. 2 во время первого и второго циклов корректировки, в то время как линейное давление является функцией разности выходных сигналов схемы по фиг. 2. Скорректированная разность давлений является функцией нескорректированной разности давлений и линейного давления. Нескорректированную разность давлений можно выразить следующим образом:
Уравн. 7
Сенсор 5, который содержит масляный диэлектрик, проявляет изменения глубины полости и изменения диэлектрической постоянной, причем каждое из этих изменений обусловлено линейным давлением PS и приблизительно пропорционально ему. Изменения глубины полости и диэлектрической постоянной вызывают изменения величины емкости конденсаторов C1 и C2. Можно показать, что разность выходов схемы во время первого и второго циклов корректировки является функцией линейного давления PS, при этом соотношение является следующим
Уравн. 8
где CL << (C1 + C2), при этом A - константа.
Уравнение 8 показывает, что сумма величины переменных емкостей является обратной функцией линейного давления. Поправочную величину получают из уравнения 8, чтобы изменить величину сигнала разности давления на основании уравнения 7.
Предпочтительно, чтобы сигнал разности давлений корректировался за счет обработки результатов измерений двух циклов корректировки или итераций в микропроцессоре 206 при решении многочисленных рядов
Уравн. 9
Ω = a+bx+cx2+... .
Для этого сигнал температуры от температурного сенсора 227 через аналого-цифровой преобразователь 222 передается на микропроцессор 206. Микропроцессор 206 обрабатывает сигналы, которые являются функцией разности давлений (уравнение 7), линейного давления (уравнение 8) и температуры, при использовании многочисленных рядов по уравнению 9, чтобы скорректировать сигнал разности давлений с учетом температуры и линейного давления. В частности, микропроцессор 206 обрабатывает сигналы, основанные на соотношениях уравнений 7 и 8, вместе с цифровым температурным сигналом, чтобы получить скорректированный сигнал разности давлений, который не зависит от изменений линейного давления и температуры. Микропроцессор 206 обеспечивает выходной сигнал для схемы считывания 98, представляющий сигнал разности давлений, скорректированный с учетом погрешностей, обусловленных линейным давлением и температурой.
Альтернативой для расчета многочисленных рядов является корректировка по таблице преобразования в памяти микропроцессора 206; эту таблицу получают эмпирически путем измерения соотношений выходов при разных линейных давлениях и рабочих температурах в экспериментальной или калибровочной среде и при сохранении результатов в упомянутой таблице в памяти микропроцессора 206. На практике, сигналы, основанные на соотношениях, представленных в уравнениях 5 и 6, получают и сравнивают с рубриками таблицы преобразования, чтобы выбрать скорректированный сигнал разности давлений.
При этом следует понимать, что хотя конденсаторы CL1 и CL2 изображены и описаны, как равные удвоенным паразитным емкостям CS1 и CS2, они могут иметь любую величину и не обязательно должны быть равны. Предпочтительно, однако, чтобы конденсаторы компенсировали паразитную емкость, и конденсаторы не должны быть настолько велики, чтобы отрицательно влиять на аппроксимации уравнений 7 и 8. Может быть желательным, например, использовать неравные конденсаторы CL1 и CL2, чтобы компенсировать паразитную емкость в несбалансированном или деформированном сенсоре, или чтобы компенсировать линейное давление. Хотя на фиг. 2 изображено два конденсатора CL1 и CL2 можно использовать разное их количество. Например, может быть использовано три или четыре конденсатора для неравного применения, при этом два конденсатора компенсируют паразитную емкость, а один или два обеспечивают компенсацию с учетом несбалансированного сенсора или линейного давления. Может быть удобно использовать один конденсатор, который переменно включается в рабочую связь с каждым из двух переменных конденсаторов C1 и C2. Кроме того, действительное переключение конденсаторов может осуществляться любым удобным способом, что гарантирует, что конденсаторы будут правильно заряжены и изолированы, чтобы исключить помехи в работе или компенсировать любой из конденсаторов сенсора.
При желании, конденсаторы CL1 и CL2 могут быть выбраны таким образом, чтобы их температурные коэффициенты были практически равны температурному коэффициенту масляного диэлектрика в сенсорных конденсаторах C1 и C2. Если конденсаторы CL1 и CL2 выбраны таким образом, их предпочтительно монтируют на внутренней части корпуса 7 сенсора 5. В результате этого конденсаторы будут подвержены действию таких же тепловых изменений, как и сенсорные конденсаторы C1 и C2, и могут быть использованы для компенсации как тепловых изменений, так и эффектов паразитной емкости.
Схема, изображенная на фиг. 2, может быть альтернативно использована для корректировки сигналов разности давления с учетом изменений температуры. Каждый из двух выходных сигналов VS, передаваемых во время двух циклов корректировки или интервалов, по разному представляет разность давления, линейное давление и температуру. Следовательно, можно показать, что сигнал от емкостного сенсора по фиг. 2 изменяется с изменением температуры как функция 1/(C1 + C2). С помощью эмпирической корректировки констант уравнения 9 сигнал разности давления можно скорректировать с учетом изменений температуры вместо линейного давления. При этом микропроцессор 206 обрабатывает числа N1 и N2, как было описано выше, за исключением того, что константы многочлена регулируются, чтобы произвести корректировку на температурные изменения, вместо линейного давления. Или же корректировка на температуру может быть осуществлена с помощью таблицы преобразования, как описывалось выше.
Данное изобретение может быть также использовано с пьезорезистивным сенсорным устройством для определения разности давлений и корректировки погрешностей из-за температуры. На фиг. 4 изображена блок-схема типичного сенсорного устройства, содержащего пьезорезистивный мост 150, включающий в себя пьезорезистивные элементы R5, R6, R7 и R8 на кремниевой поверхности. В типичном устройстве мост 150 был выполнен как мост для измерения разности давлений, реагирующий на различия между двумя давлениями P1 и P2. Пьезорезистивные элементы R5 и R6 на противоположных сторонах моста реагировали на разность давлений одним способом (например, положительно), а пьезорезистивные элементы R7 и R8 на противоположных сторонах моста реагировали на разность давлений другим способом (например, отрицательно). Мост 150 запитывался напряжением Ve постоянного тока, подаваемым с одной стороны к соединению между пьезорезистивными элементами R5 и R6, и с другой стороны к соединению между пьезорезистивными элементами R6 и R7. Пьезорезистивные элементы реагировали на разность давлений, изменяя равновесие моста, чтобы выдать выходной сигнал, характеризующий разность давлений, на аналого-цифровой преобразователь 152. Выходной сигнал от преобразователя 152 передавался на микропроцессор (не показанный на фиг. 4).
Являясь устройством для измерения статичного или линейного давления, мост 150 реагировал на линейное давление таким образом, что противоположные пьезорезистивные элементы R5 и R6 изменялись одним способом (например, положительно) в ответ на линейное давление, а противоположные пьезорезистивные элементы R7 и R8 реагировали на линейное давление противоположным способом (например, отрицательно). Изменения линейного давления на пьезорезистивных элементах моста изменяли равновесие моста, вырабатывая выходной сигнал, характеризующий линейное давление, для аналого-цифрового преобразователя 152. Выходной сигнал из преобразователя 152 передавался на микропроцессор.
В ряде случаев использовались два моста 150, - один для измерения линейного давления, а другой - для измерения разности давлений, как это было описано выше. В любом случае также, как правило, использовалось чувствительное к температуре сопротивление Rт в прямом контакте со средой под давлением, чтобы выдать сигнал, характеризующий температуру, через аналого-цифровой преобразователь 154 на микропроцессор. Следовательно, выходной сигнал аналого-цифрового преобразователя 154 был функцией температуры среды, прикладываемой к мосту 150. Выходные сигналы моста или мостов 150 и чувствительного к температуре сопротивления Rт были функциями разности давлений и/или линейного давления и температуры. Таким образом, измерения разности давлений можно корректировать с учетом изменений линейного давления и температуры, а измерения линейного давления можно корректировать с учетом изменений температуры.
Однако, известное устройство требовало использования специального аналого-цифрового преобразователя для каждого сенсора, поэтому корректировка для измерения моста линейного давления требовала применения двух преобразователей, а корректировка моста для измерения разности давлений требовала применения трех преобразователей, при этом каждый преобразователь обеспечивал вводной сигнал от сенсора в процессор. Чтобы исключить необходимость использования нескольких преобразователей, для попеременной передачи отдельных выходных сигналов сенсора к одному преобразователю использовалась технология мультиплексирования, но недостатком мультиплексирования является то, что попеременная передача нескольких информационных сигналов сенсора к преобразователю приводила к потере информации.
Данное изобретение позволяет передавать сигналы, характеризующие две переменные, например, разность давлений и линейное давление, или линейное давление и температуру, через один аналого-цифровой преобразователь при минимальной потере информации и минимальных искажающих погрешностях. Схема, осуществляющая эти функции, изображена на фиг. 5, на которой показан типичный пьезорезистивный сенсорный мост 160, имеющий переменные пьезорезистивные элементы R9, R10, R11 и R12 запитываемые напряжением Ve постоянного тока. Выход моста 160 обеспечивает входной сигнал на аналого-цифровой преобразователь 230, в свою очередь, обеспечивает выходной сигнал на микропроцессор 206 (которым может быть микропроцессор, аналогичный изображенному на фиг. 2). Преобразователь 230 также вырабатывает выходной сигнал к схеме обратной связи 232, чтобы выдать управляющий сигнал CNTL (см. фиг. 3) на линии 210. Управляющий сигнал на линии 210 вырабатывает импульсы первого и второго цикла корректировки, показанные на фиг. 3, как управляющий сигнал CNTL, чтобы привести в действие переключатель 234 и через инвертор - переключатель 238. Постоянное сопротивление R13 подсоединено между соединением сопротивлений R10 и R11 моста 160 и соединением переключателей 234 и 238, так, что во время первого цикла корректировки переключатель 234 замыкается, а переключатель 238 открывается, и сопротивление R13 соединено параллельно с пьезорезистивным элементом R10. Во время второго цикла корректировки переключатель 234 открыт, а переключатель 238 замкнут, сопротивление R13 соединено параллельно с пьезорезистивным элементом R11.
Если мост 160 предназначен для измерения разности давлений, выходной сигнал этого моста изменяется с изменением разности давлений и линейного давления. Сопротивление R13 - это постоянное сопротивление, температурный коэффициент которого предпочтительно, но не обязательно, практически равен температурным коэффициентам пьезорезистивных элементов R9 - R11. Во время первого цикла постоянное сопротивление R13 соединено параллельно с пьезорезистивным элементом R10, так, что аналого-цифровой преобразователь 230 вырабатывает первый выходной сигнал, который является функцией как разности давлений, так и линейного давления. Во время второго цикла, когда сопротивление R13 параллельно пьезорезистивному элементу R11 преобразователь 230 вырабатывает второй выходной сигнал, который также является функцией разности давлений и линейного давления. Однако, второй выходной сигнал отличается от первого выходного сигнала. Микропроцессор 206 обрабатывает первый и второй выходные сигналы с помощью многочленных рядов уравнений (или на основании таблицы преобразований, как это было описано выше), чтобы получить скорректированный выходной сигнал разности давлений и передать его на устройство считывания или дисплей 98, при этом скорректированный выходной сигнал скорректирован с учетом погрешностей, вызванных изменениями линейного давления.
В том случае, если мост 160 предназначен для измерения линейного давления, сопротивление R13 выбирается таким образом, чтобы его температурный коэффициент отличался от температурных коэффициентов пьезорезистивных элементов R9 - R12, и предпочтительно был равен нулю. В результате этого выходные сигналы преобразователя 230 во время первого и второго циклов корректировки являются разными функциями как линейного давления, так и температуры. Как и в случае с измерением разности давлений, микропроцессор 206 обрабатывает сигналы, используя многочленные ряды уравнения 9 или таблицу преобразования, как уже было описано, чтобы выработать скорректированный выходной сигнал манометрического или абсолютного давления для линейного давления и передать его на схему считывания 98.
В вариантах, показанных на фиг. 5, конструктивное выполнение мостовых сенсоров как сенсора разности давления или сенсора линейного давления имеет принципиальное значение для того, чтобы схема измеряла разность давлений или линейное давление. Выбор температурного коэффициента постоянного сопротивления R13 также важен с точки зрения воздействия на переменные, отраженные в выходных сигналах моста. Если измеряется разность давлений, выходные сигналы должны быть функциями разности давлений и линейного давления. В этом случае предпочтительно, но не обязательно, чтобы температурный коэффициент постоянного сопротивления R13 практически согласовывался с температурными коэффициентами пьезорезистивных элементов R9 - R12, чтобы, насколько это возможно, компенсировать температурные изменения, сводя таким образом к минимуму влияние температурных изменений на сенсор.
Если измеряется линейное давление, выходные сигналы должны быть функциями линейного давления и температуры, поэтому важно, чтобы постоянное сопротивление R13 не реагировало на температурные изменения в сенсоре. Следовательно, при измерении линейного давления температурный коэффициент постоянного сопротивления R13 должен отличаться от температурных коэффициентов пьезорезистивных элементов R9 - R12, чтобы гарантировать, что выходные сигналы являются функциями линейного давления и температуры сенсора. Предпочтительно, чтобы температурный коэффициент постоянного сопротивления R13 был равен нулю.
Пьезорезистивные мосты 160 могут быть полумостами, в которых используется только два пьезорезистивных элемента. При этом каждый из двух пьезорезистивных элементов полумоста для измерения разности давлений реагирует на одно из контролируемых давлений, чтобы выработать сигнал, характеризующий разность между ними. Каждый из двух пьезорезистивных элементов полумоста для измерения линейного давления реагирует на линейное давление, изменяя положительно импеданс одного пьезорезистивного элемента и отрицательно импеданс другого пьезорезистивного элемента. Согласно данному изобретению обеспечивается передача сигналов, характеризующих две переменные, например разность давлений и линейное давление, или линейное давление и температуру, через аналого-цифровой преобразователь при минимальной потере информации и минимальных искажающих погрешностях. Одним вариантом изобретения предусмотрена работа переменных сенсорных конденсаторов, чтобы получить множество ясно выраженных соотношений, среднее из которых является функцией разности давлений и различие между которыми является функцией линейного давления. Другие варианты изобретения предусматривают работу пьезорезистивных мостов, чтобы получить сигналы, характеризующие два соотношения. Эти соотношения используются для получения скорректированного сигнала, который является точной мерой разности давлений или линейного давления.
Хотя данное изобретение было описано со ссылкой на предпочтительный вариант, специалистам в данной области будет ясно, что конструктивное выполнение может быть изменено, не выходя за рамки идеи и объема данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬНАЯ СХЕМА | 1987 |
|
RU2133969C1 |
| ИЗМЕРИТЕЛЬНАЯ ЦЕПЬ С ДАТЧИКАМИ ИЗ ШУНТИРОВАННЫХ КОНДЕНСАТОРОВ | 2003 |
|
RU2301405C2 |
| ИЗМЕРИТЕЛЬНАЯ СХЕМА И СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО СИГНАЛА | 1990 |
|
RU2137145C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАБОЧЕГО ДАВЛЕНИЯ С УЛУЧШЕННОЙ КОМПЕНСАЦИЕЙ ОШИБОК | 2000 |
|
RU2243518C2 |
| ТРЕХПРОВОДНОЙ ПЕРЕДАТЧИК | 1992 |
|
RU2111543C1 |
| СИСТЕМА ДИАГНОСТИКИ ДЛЯ ОПРЕДЕЛЕНИЯ РАЗРЫВА ИЛИ УТОНЧЕНИЯ ДИАФРАГМ | 2005 |
|
RU2397484C2 |
| МУЛЬТИФАЗНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА С СИНХРОНИЗИРОВАННЫМИ СИГМА-ДЕЛЬТА КОНВЕРТОРАМИ | 2004 |
|
RU2379831C2 |
| ЭЛЕКТРОМАГНИТНЫЙ РАСХОДОМЕР С ДЕТЕКТОРОМ ПОРОЖНЕЙ ТРУБЫ | 1994 |
|
RU2141627C1 |
| ДАТЧИК ДЛЯ ОПРЕДЕЛЕНИЯ ДАВЛЕНИЯ РАБОЧЕЙ ТЕКУЧЕЙ СРЕДЫ | 1993 |
|
RU2126532C1 |
| ДАТЧИК С УЛУЧШЕННОЙ КОМПЕНСАЦИЕЙ | 1995 |
|
RU2138781C1 |

Изобретение относится к измерительной технике. Двухпроводный датчик содержит сенсор давления, включающий в себя первое и второе сенсорные средства, каждое из которых имеет импеданс, величина которого изменяется с изменением измеряемого давления и с изменением заданного внешнего условия, например линейного давления или температуры. Предусмотрен корректирующий постоянный импеданс, величина которого остается практически неизменной под действием установленных внешних условий. Соединительное средство попеременно соединяет постоянный импеданс в рабочую связь с первым и вторым сенсорными средствами для получения первого и второго сигналов, каждый из которых является функцией измеряемого давления и заданного внешнего условия. Средство корректировки импеданса обрабатывает первый и второй сигналы, например, с помощью многочленных рядов или таблицы преобразования и позволяет получить скорректированный сигнал давления. Данное устройство характеризуется повышенной точностью измерения. Высокая надежность работы обеспечивается за счет замены механических средств корректировки выходного сигнала на электрические средства. 8 з.п.ф-лы, 5 ил.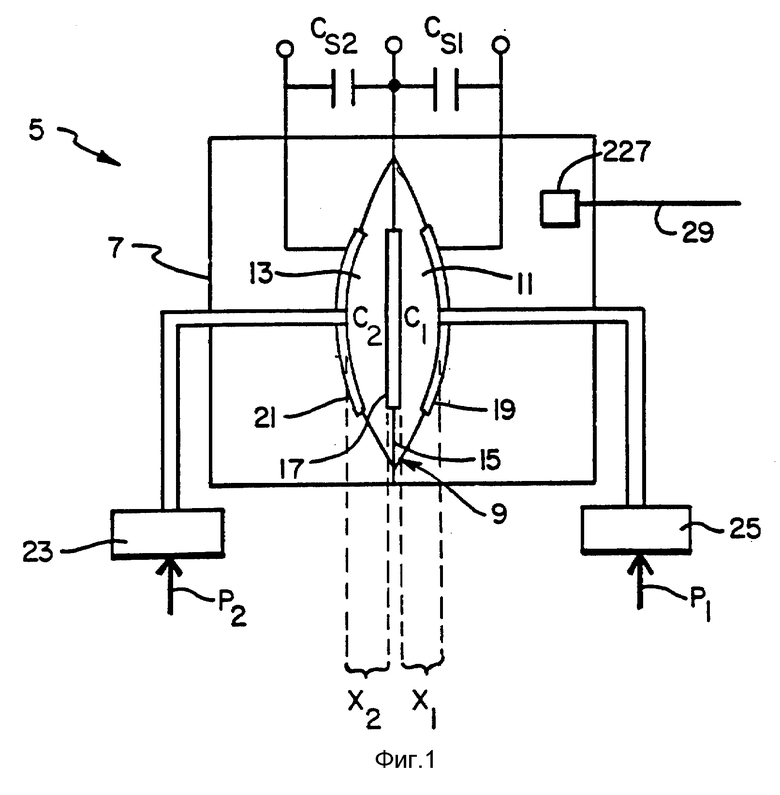
| US 4791352 A, 13.12.88 | |||
| US 4449409 A, 22.05.84 | |||
| Емкостный датчик давления | 1982 |
|
SU1421266A3 |
