Настоящее изобретение относится к технологии компенсации определяемой переменной, которая может представлять положение, например, в системе автоматизации технологического процесса, или некоторой другой переменной, например, давления, температуры, pH, оптической интенсивности, как в системах управления технологическим процессом, в частности к устройствам, таким как датчики, исполнительные механизмы и устройства для позиционирования, которые компенсируют определяемую переменную, чтобы выдать выходной сигнал, характеризующий данную переменную.
Существует необходимость в повышении точности, с которой измерительные датчики и устройства с активизированным выходом, в частности устройства для позиционирования, компенсируют выходные сигналы, характеризующие переменные процесса. Измерительные датчики определяют переменные процесса, такие как давление, температуру, расход, pH, положение, смещение, скорость и т.п. в системах управления технологическим процессом или автоматизации процесса. Датчики содержат аналогово-цифровые преобразователи (АЦП) для преобразования в цифровую форму выходов датчика, характеризующих определяемую переменную процесса, и компенсационную схему для компенсации повторяющихся ошибок в оцифрованных выходах переменных. Одним из главных источников ошибок является температура. Компенсационная схема типично содержит микропроцессор, который вычисляет компенсированный выход переменной процесса с помощью длинных полиномиальных функций, выбранных для подгонки ошибочных характеристик сенсора в некотором диапазоне давлений. Постоянные в этой длинной полиномиальной функции выбирают индивидуально для каждого сенсора. Во время изготовления путем индивидуального тестирования каждого сенсора формируют набор характеристических постоянных, связанных с ошибками сенсора, которые затем запоминают в ЭППЗУ датчика. С помощью такой схемы компенсации переменные процесса можно типично исправлять с точностью около 0,5% во всем диапазоне первичной переменной процесса, которую измеряет данный датчик. Например, известные датчики давления, имеющие диапазон от 0 до 150 дюймов вод. ст. (0 -37363,3 Па) дают давления, скорректированные с точностью 0,5%. Ограниченность электрического питания и времени на вычисление окончательного результата затрудняет выполнение более сложных вычислений для повышения точности.
Ошибки в рабочей характеристике сенсора могут быть комплексной, иногда нелинейной функцией многих переменных. Первичная переменная (переменная, которую компенсируют) прямо влияет на ошибку, тогда как вторичные переменные процесса (влияющие на измерение первичных переменных процесса) косвенно влияют на ошибку. С повышением требований к точности влияние вторичных переменных приобретает большее значение. Современные подходы решают эту проблему с помощью полиномов высокого порядка для процесса с многими переменными, но получающееся уравнение арифметически плохо обусловлено и чувствительно к способу вычисления полинома, так как могут возникать переполнения. Одно из компенсационных управлений для датчика является полиномом одиннадцатого порядка, состоящим из приблизительно 100 членов в трех переменных, которое должно вычисляться каждый раз, когда датчик выдает переменную процесса. Формирование характеристических постоянных для таких полиномов высокого порядка неэкономично и требует много времени. Кроме того, при таком подходе нельзя оптимально определить реальное поведение нелинейных переменных процесса, которые взаимодействуют нелинейно.
Кроме проблем сложности программного обеспечения и вычислений, критическое значение имеет расход энергии в датчиках, которые принимают всю свою рабочую мощность по тем же проводам, что и используемые для связи. Кроме того, некоторые "по существу безопасные" места, в которых устанавливают датчики, накладывают ограничения на доступную для датчика мощность. Ограниченный токовый бюджет не только ограничивает количество и сложность вычислений, но и влияет на функциональные возможности, которые можно заложить в датчик. Например, АЦП могут преобразовывать оцифрованные выходные сигналы сенсора гораздо быстрее, если имеется больше мощности, повышая тем самым скорость обновления данных в датчике. ЕЕПРОМ достаточно большой емкости, чтобы вместить все характеристические постоянные, также потребляет мощность, которая бы могла быть использована для обеспечения дополнительных функциональных возможностей.
Поэтому существует необходимость в точном способе компенсации переменных процесса, который был бы прост с точки зрения вычислений и требовал небольшого числа запоминаемых характеристических постоянных, чтобы расходовать меньше энергии и обеспечивать дополнительную мощность для расширения функциональных возможностей и повышения скорости обновления данных в датчике.
Один из вариантов измерительных датчиков содержит сенсор для определения переменной процесса (ПП), такой как давление, и цифрующее средство для преобразования в цифровую форму выходного сигнала, характеризующего определяемую ПП. Сенсор определяет ПП в некотором диапазоне значений ПП. ЗУ в датчике хранит по меньшей мере две составные функции, причем каждая составная функция имеет некоторое не равное нулю значение в установленной области диапазона ПП и по существу нулевое значение в остальной части этого диапазона. ЗУ также хранит набор компенсационных формул, каждая из которых соответствует некоторой составной функции. Схема выбора в датчике выбирает те составные функции, которые имеют ненулевую ординату в величине оцифрованной ПП, и корректирующая схема обеспечивает по меньшей мере одно поправочное значение, причем каждое поправочное значение вычисляют из компенсационной формулы, соответствующей выбранной составной функции. Взвешивающая схема взвешивает каждое поправочное значение ординатой, соответствующей выбранной составной функции, и суммирует множимые для получения компенсированной ПП. Компенсированную ПП передают в схему управления, связывающую датчик с системой управления.
Второй вариант содержит сенсор для определения первичной ПП, такой как перепад давления, и другие сенсоры для определения вторичных ПП, таких как линейное давление и температура. Ряд преобразователей преобразует определяемые ПП в цифровую форму. Каждой из переменных присваивают по меньшей мере одну составную функцию, причем по меньшей мере одной из переменных присваивают по меньшей мере две одномерных составных функции. Выбирают составные функции, имеющие по существу ненулевую ординату на оцифрованных значениях ПП, и из ЗУ извлекают компенсационные формулы, соответствующие выбранным составным функциям. Логическая схема размытого И формирует все индивидуальные трехкомпонентные комбинации и определяет "силу правила" или минимум каждой из комбинаций. Взвешивающая схема функционирует по существу так же, как описано выше, чтобы получить скомпенсированную первичную ПП, которую форматируют и передают на двухпроводную схему.
В дальнейшем изобретение поясняется описанием конкретных вариантов его воплощения со ссылкой на прилагаемые чертежи, на которых:
фиг. 1 изображает вид датчика, установленного в полевых условиях системы управления процессом;
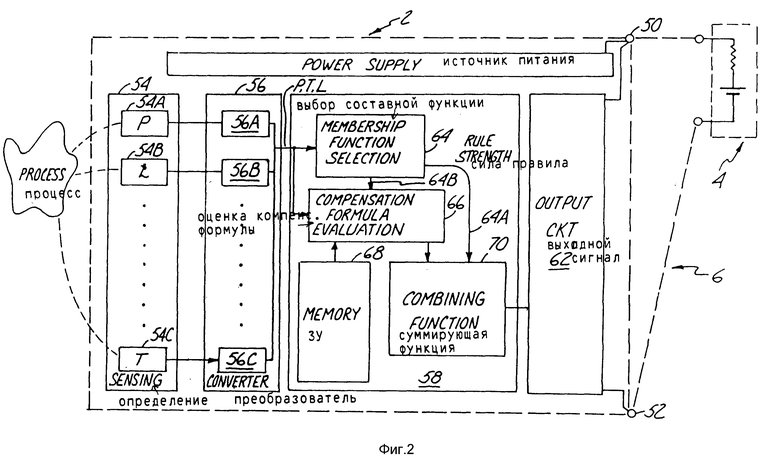
фиг. 2 - структурную схему датчика согласно изобретению;
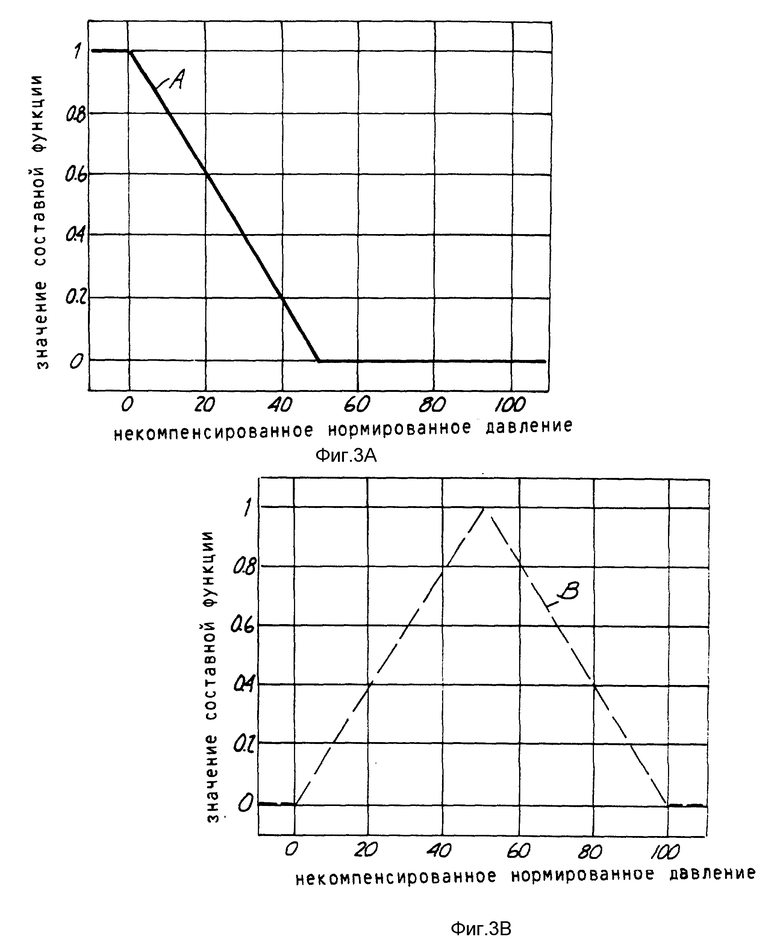
фиг. 3A- C - графики трех составных функций A-C, соответственно, и
фиг. 3D - график всех трех составных функций A-C, показанных как функции нескомпенсированного нормированного давления;
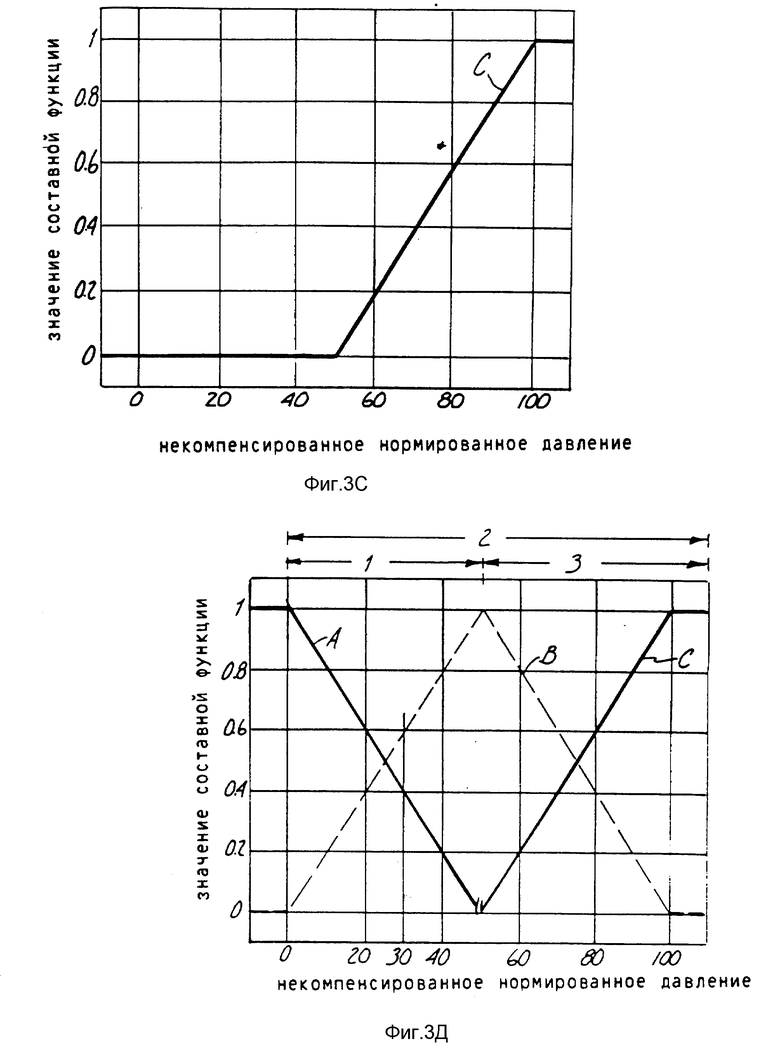
фиг. 4 - алгоритм компенсационной схемы 58 по фиг. 2;
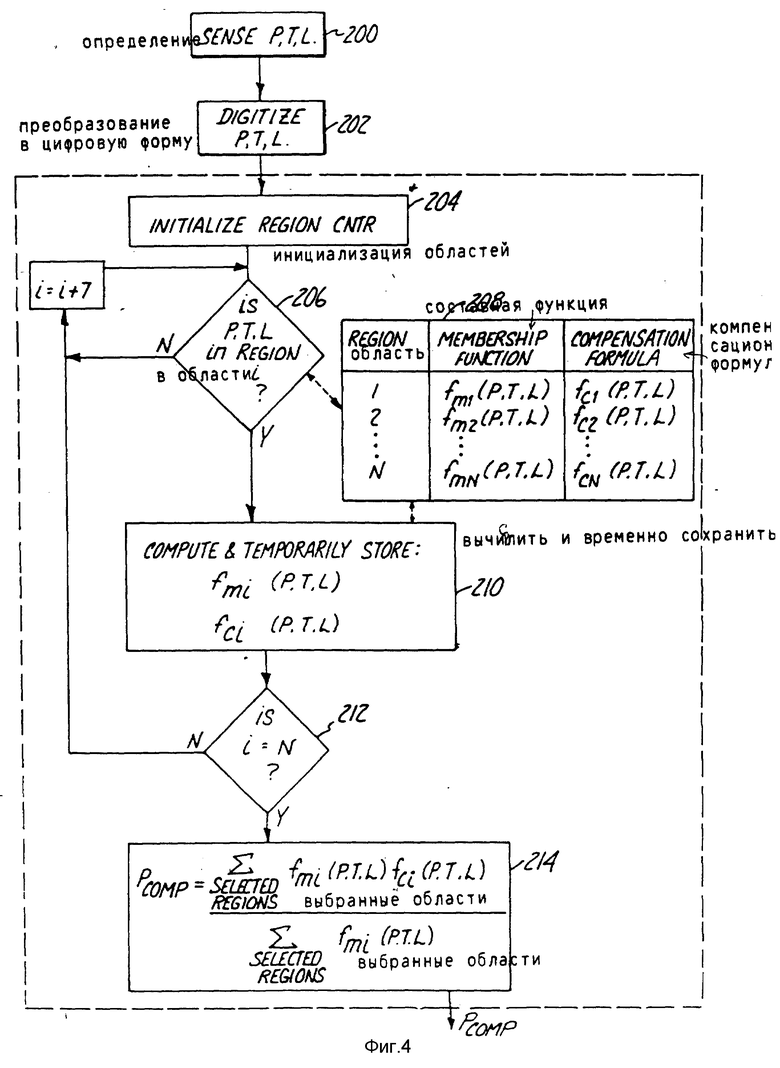
фиг. 5 - структурную схему компенсационной схемы 58 с альтернативным вариантом схемы выбора составной функции 64;
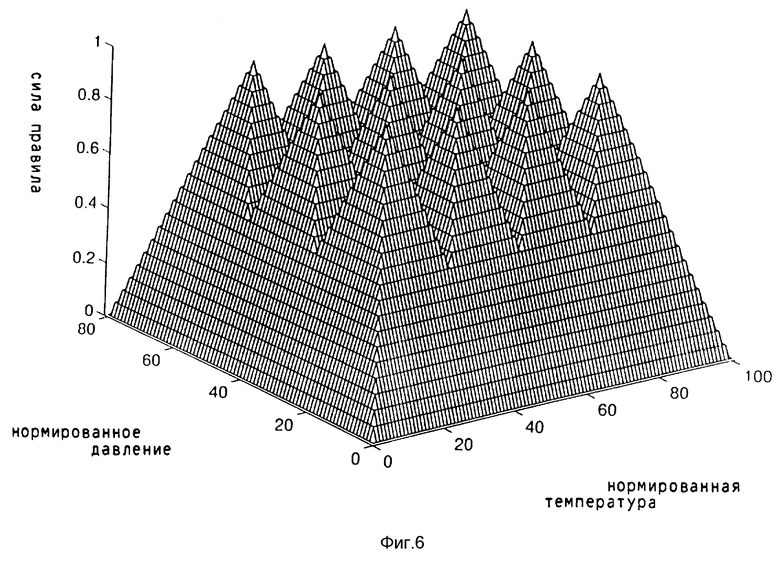
фиг. 6 - график многомерных составных функций;
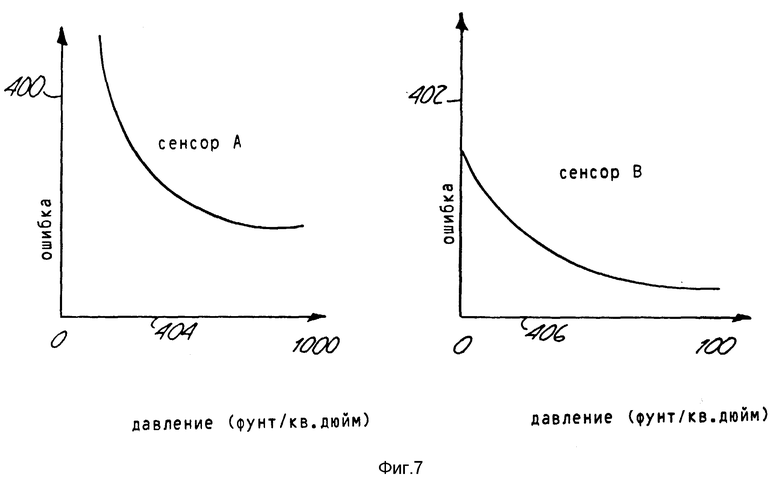
фиг. 7 - график ошибки как функции давления для двух сенсоров перепада давления A и B.
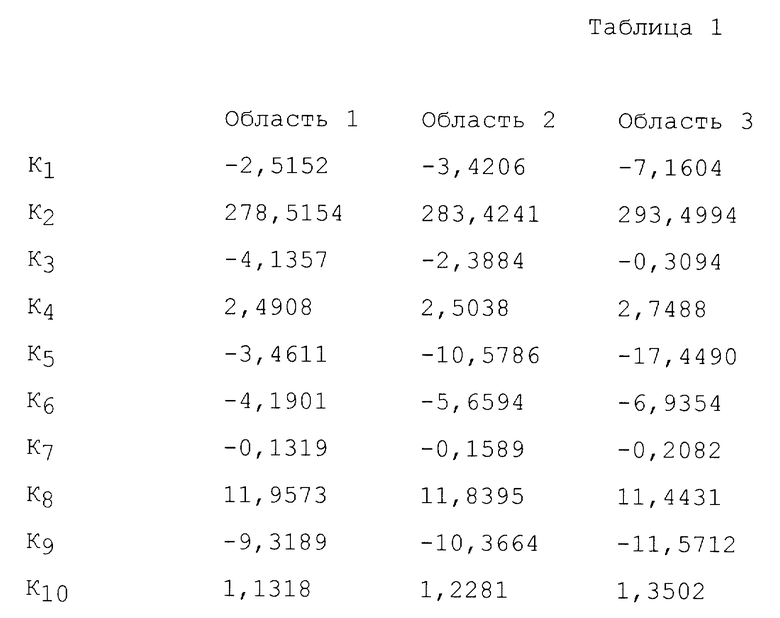
В таблице 1 показаны постоянные K1-K10 для каждой из областей.
Изображенный на фиг. 1 датчик давления, обозначенный в целом позицией 2, передает выходной сигнал, характеризующий давление, в цифровую систему управления (DCS) 4 через двухпроводной токовый контур, обозначенный в целом позицией 6. Жидкость 8 в резервуаре 10 течет через трубу 12 в ряд труб 14, 16 и 18, которые все содержат жидкость 8. Датчик давления 2 определяет перепад давления на пластине с отверстием 20, расположенной в потоке жидкости 8. Этот перепад давления характеризует расход жидкости 8 в трубе 12. Клапан 22, расположенный ниже по потоку от передатчика 2 управляет потоком в трубе 12 в зависимости от команд, принятых от блока DCS 4 через другой двухпроводной контур 24. Блок DCS 4 типично расположен в аппаратурном помещении, удаленном от полевых условий управления процессом и взрывозащищенном и по существу безопасном месте, тогда как датчик 2 и клапан 22 установлены непосредственно на трубе 12 в полевых условиях.
На фиг. 2 датчик 2 изображен с двумя выводами 50 и 52, выполненными с возможностью подключения к двум выводам блока DS 4 через витую пару проводов 6. Блок DCS 4 выполнен в виде сопротивления и источника питания, соединенных последовательно, и показан в общем позицией 4. Датчик 2 имеет часть 54, содержащую сенсоры, которые включают в себя емкостной сенсор перепада давления 54A, сенсор абсолютного давления 54B и датчик температуры 54C. Датчик 2 определяет перепады давления между 0 и 250 дюймами вод. ст. (0 - 62272,2 Па). Однако датчик 2 может также измерять переменные процесса, характеризующие положение, объемный и массовый поток, температуру, уровень, плотность, смещение, pH, турбулентность, растворенный кислород и концентрацию ионов. Аналоговый выходной сигнал сенсоров 54A-C передают на схему преобразования 56, которая содержит основанные на напряжении или емкости аналогово-цифровые преобразователи (АЦП), которые могут быть такого типа, как описано в патентах США 4878012, 5083091, 5119033 и 5155455. Каждый преобразователь 56A-C вырабатывает последовательный поток от 10 до 16 разрядов, характеризующих соответствующую оцифрованную переменную процесса (ПП), на шине, связанной с компенсационной схемой 58.
Компенсационная схема 58 использует размытую логику для формирования выходного сигнала, представляющего компенсированную ПП, и типично содержит микропроцессор, например, серии Motorola 68НC05, со встроенным ЗУ. Схема 58 компенсирует ошибки в оцифрованном сигнале, представляющем перепад давления, с помощью оцифрованных сигналов, представляющих абсолютное давление, температуру и перепад давления. Компенсационная схема 58 основана на посылке, что компенсацию точнее всего моделировать путем сегментации переменных, подлежащих компенсации, на множество областей, перекрывающих друг друга, где каждой области присвоена упрощенная компенсационная формула, оптимизированная для данной области, и составная функция, которая может быть многомерной. "Сила" формулы в данной области изменяется в рамках данной области и описана ординатой составной функции на значении переменной, подлежащей компенсации. Ордината составной функции типично выражается числом между 0 и 100%, показывающим степень, с которой значение переменной, подлежащей компенсации, можно смоделировать с помощью компенсационной формулы, присвоенной данной выбранной области. Компенсацию определяют сначала выбором областей, которые включают данное значение переменной, подлежащей компенсации, и выбором составных функций и компенсационных формул, соответствующих каждой выбранной области. Следующий этап - обеспечение набора поправочных значений путем вычисления каждой из компенсационных формул на значении переменной, подлежащей компенсации, и определения силы каждого поправочного значения из соответствующей составной функции. И наконец, компенсационное значение определяют путем сложения поправочных значений, умноженных на силу составной функции на значении переменной, подлежащей компенсации.
Схема выбора составной функции 64 вбирает, какая составная функция является ненулевой на цифровом значении P, Т, L, и выдает сигналы, характеризующие выбранные составные функции, на шину 64B. Схема 64 также выдает ординаты выбранных составных функций на оцифрованных значениях P, Т, L ("силы правила") на шину 64A. Как правило, компенсационная схема 58 включает как минимум две одномерные перекрывающие друг друга составные функции для перепада давления. Если для компенсации используют более одной переменной, должно быть по меньшей мере две составные функции для одной из переменных. На фиг. 3A-C показаны составные функции перепада давления A, B и C, каждая из которых имеет ненулевое значение в разном заранее установленном интервале нескомпенсированных давлений в рамках данного диапазона. Переменная, подлежащая компенсации (перепад давления), компенсируется всеми тремя переменными (P, Т и L), но только P присвоены составные функции. (В наиболее общем случае каждой переменной присваивают множество составных функций). Составная функция A, показанная сплошной линией на фиг. 3A, имеет ненулевое значение между 0 и 50% диапазона и после этого нулевой характер. Составная функция B, показанная прерывистой линией на фиг. 3B, имеет ненулевое значение между 0 и 100% диапазона и нулевое значение в остальных местах. Составная функция C, показанная сплошной линией на фиг. 3C, имеет ненулевое значение между 50 и 100% диапазона и нулевое значение в остальных местах. На фиг. 3D изображены составные функции A, B и C, нанесенные как функция диапазона нормированного давления. Ненулевые сегменты составных функций A, B и C определяют области 1, 2 и 3, соответственно. Форма уравнений не должна быть одинаковой для каждой из областей. Предпочтительная форма компенсационной формулы для областей 1-3, обеспечивающая требуемую точность сенсора перепада давления с металлическим элементом, представлена уравнением 1, которое имеет член второго порядка как максимальный член и требует не более 10 характеристических постоянных.
Pкорр(P T, L)=К1+К2P+К3Т+К4L+К5P2+ К6Т2 +K7L2+K8PL+K9TP+K10LT (1)
Схема оценки компенсационной формулы 66 оценивает и выдает поправочное значение для каждой из компенсационных формул, соответствующих выбранным составным функциям. Набор характеристических постоянных для каждой из областей 1-3 хранится в ЗУ 68 и приведен в таблице (см. в конце описания).
ЗУ 68 является энергонезависимым ЗУ, содержащим составные функции, компенсационные формулы и характеристические постоянные для компенсационных формул. Схема сложения функций 70 принимает поправочные значения и силы правила и выдает компенсированную переменную процесса P согласно следующему уравнению: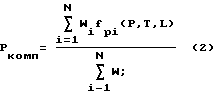
где N - число выбранных областей,
Wi - сила правила для i-й области,
fi(P, T, L) - поправочное значение из компенсационной формулы, соответствующей i-й области, и
Pкомп - компенсированный перепад давления.
Выходная схема 62 принимает и форматирует компенсированный перепад давления ПП и передает его на выводы 50, 52 для передачи к контуру управления процессом 6. Выходная схема 62 может быть реализована несколькими путями. Первой альтернативой является цифроаналоговая схема, в которой компенсированную ПП преобразуют в аналоговый ток, характеризующий компенсированное ПП, а затем передают на токовый контур 6. Вторая альтернатива состоит в полностью цифровой передаче, например, типа Fieldbus, компенсированного ПП на контур 6. В третьем варианте реализации накладывают цифровой сигнал, характеризующий ПП, на аналоговый ток, также характеризующий ПП, как в протоколе HART.
Число и функциональную форму составных функций определяют по требуемой точности компенсации (например, точности 0,05%) и рабочим характеристикам сенсора. Например, сенсор со значительной степенью ошибок, которые необходимо компенсировать, требует больше составных функций, чем сенсор, который отвечает требуемой степени точности. Каждая составная функция для сенсора, который требует больше компенсации, может иметь разную функциональную форму (например, экспоненциальную, гауссову и логарифмическую).
Рассмотрим давление для приблизительно 30% диапазона, соответствующее приложенному давлению 75,0 дюймов вод. ст. (18681,6 Па), показанное на фиг. 3D сплошной вертикальной линией и включенное в ненулевые сегменты составных функций A и B. Составные функции A и B, соответствующие областям 1 и 2, являются "выбранными составными функциями". Значения двух составных функций на 30% интервала -0,359 и 0,641, соответственно. Компенсационные формулы для областей 1 и 2 даны в уравнениях 3 и 5.
fp(P, T, L) = -2,512+278,5154P-4,137T+2,4908L-3,4611P2-4,1901T2- 0,1319L ** 2+11,957PL-9,3189TP+1,1318LT (3)
fp(P, T, L) = -3,4206+283,4241P-2,3884T+2,5038L-10,5786P2-5,694T ** 2- 0,1589L ** 2+11,833PL-10,3664TP+1,2281LT (5)
Поправочные значения из уравнений 3 и 5 составляют 75,188 дюймов вод.ст. (18728,5 Па) и 75,070 дюймов вод.ст. (18699,1 Па) соответственно. Компенсированное давление обеспечивается функцией сложения, приведенной в уравнении 2 выше, и составляет 75,112 дюймов вод.ст. (18709,6 Па), упрощенным из
Значения T и L, подставленные в приведенное выше уравнение, соответствуют окружающей температуре и линейному атмосферному давлению.
Вместо того, чтобы обрабатывать полином одиннадцатого порядка, как это делается в прототипе, вычисляют только два полинома второго порядка. Полученное из функции второго порядка поправочное значение нечувствительно к способу вычисления (т.е. отсутствует переполнение), требует меньше времени на его определение, использует меньшее число характеристических постоянных и оставляет больше места в памяти для дополнительных функциональных возможностей программного обеспечения в датчике 2. Еще одно преимущество применения размытой логики компенсационной схемы 58 состоит в учете эффекта нелинейного взаимодействия между переменными, когда трудно смоделировать в известной одной полиномиальной схеме компенсации. Виды переменных, подходящих для использования в предложенной компенсационной схеме, не ограничиваются определяемыми переменными. Переменная может быть зависимой от времени, например, первой или второй производной, или интегралом переменной. В этом случае соответствующая составная функция будет использоваться для обеспечения минимальной компенсации, если производная большая (т.е. величина компенсации незначительна по сравнению с величиной изменения давления, поэтому можно компенсировать первичную ПП приблизительно).
Активизация инструмента устройством для позиционирования или исполнительным механизмом на оптимальную величину, например, в машине для отбора и размещения требует наличия определяемого положения и может включать скорость и ускорение.
Другим видом переменной может быть переменная "зависящая от истории", в которой учитываются эффекты гистерезиса. Зависящие от истории переменные включают информацию о предыдущих измерениях, сделанных конкретным сенсором в датчике 2. Например, чрезмерное превышение давления в емкостном датчике давления модифицирует его емкость как функцию давления в последующих измерениях. Разные компенсационные формулы применяют в зависимости от серьезности и частоты превышения давления. Еще один вид переменной - "зависящая от положения" переменная, у которой значение изменяется с изменением положения, например, в диафрагме, имеющей одну жесткость при изгибе и другую в отсутствии приложенного давления.
Следующий вид переменной - "зависящая от устройства" переменная, для которой составные функции и компенсационные формулы изменяются с изменением материалов, используемых для изготовления датчика 2. Например, сенсор, определяющий давление в интервале низких давлений, имеет требования к компенсации, отличные от тех, которые применимы для сенсора, определяющего давление в интервале высоких давлений. Аналогично, сенсор давления с диафрагмой из материала марки хастеллой (Hastelloy) имеет другие характеристики ошибок и поэтому требует других вычислений, чем при материале марки монель (Monel).
Изобретение решает проблему неточностей в известной технологии компенсации, так называемой поэлементной линейной подгонке. При поэлементной линейной подгонке диапазон интересующей переменной сегментируют на два или более интервалов и выбирают линейное уравнение для каждого интервала, оптимально подходящее для него. К сожалению, на границах между такими отдельно компенсированными интервалами существуют небольшие нарушения непрерывности или несоответствия. Предложенная схема компенсации с перекрывающимися составными функциями обеспечивает плавный переход между интервалами интересующих переменных.
На фиг. 4 показан алгоритм функций компенсационной схемы 58. Переменные процесса P, Т, L определяют и преобразуют в цифровую форму в блоках 200 и 202, соответственно. Счетчик для подсчета числа областей инициализируют в блоке 204. Блок решения 206 находит i-ю составную функцию в блоке ЗУ 208 и определяет, есть ли оцифрованное значение P,T,L в i-й области, описанное i-й составной функцией. Если данная цифровая точка включена в эту область, блок вычисления 210 находит соответствующие компенсационные формулы и характеристические постоянные в ЗУ 208 для вычисления значения ординаты составной функции fmi(P, T,L) и поправочного значения fci(P,T,L), вычисленного из i-й компенсационной формулы, или иным образом увеличивает счетчик области i. Блок решения 212 обеспечивает повторную обработку этим контуром до тех пор, пока не будут выбраны все области, включающие оцифрованную точку P,T,L. Затем блок 214 вычисляет скомпенсированный перепад давления, как указано.
На фиг. 5 детально представлен альтернативный вариант схемы выбора составной функции 64. Так же как на фиг. 2, схема размытой компенсации 58 принимает оцифрованный перепад давления (P), оцифрованное абсолютное линейное давление (L) и оцифрованную температуру (Т) и использует эти три переменные для получения скомпенсированного перепада давления. Три основных функциональных блока представлены схемой силы правила 302, схемой оценки компенсационной формулы 304 и суммирующей схемой 306. Однако в этом альтернативном варианте всем трем переменным (P, Т, L) присвоено множество составных функций. В частности, перепаду давления присвоено четыре составные функции, обозначенные как fp1, fp2 fp3 и fp4 температуре присвоено три составные функции ft1, ft2 и ft3, и абсолютному давлению присвоено две составные функции f11 и f12. Схема 58 предпочтительно реализована в КМОП- микропроцессоре (с соответствующим ЗУ на кристалле), чтобы сберегать мощность в датчике, который получает питание только из токового контура.
Схема 310 принимает оцифрованное значение P и выбирает те составные функции, которые имеют ненулевую ординату на данном оцифрованном значении P. Поскольку ненулевые части составных функций могут перекрываться, обычно выбирают больше одной составной функции для каждой оцифрованной ПП. Если составные функции перекрываются более чем на 50%, вычисляют уравнения 2N, где N - число переменных, разделенных на более чем одну составную функцию. Выход схемы 310 является ординатой каждой из выбранных составных функций, соответствующих оцифрованному значению P, и маркируется в 310A. Например, если бы оцифрованное значение P входило в ненулевую часть трех из четырех составных функций P, тогда схема 310 выдала бы три значения, каждое из которых является ординатой трех выбранных составных функций, соответствующих данному оцифрованному значению P. В частности, для P=po шина 310A содержит следующие ординаты: [fp2(p0), fp3(p0), fp4(po)]. Приблизительно в то же время, чтобы обеспечить синхронность, схема 312 принимает оцифрованное значение Т и выбирает составные функции температуры, имеющие ненулевое значение в оцифрованном значении Т. Если бы оцифрованное значение Т входило в ненулевую часть двух из трех составных функций Т, схема 312 выдала бы два значения на шину 312A, каждое из которых было бы ординатой выбранной составной функции. В частности, для T=to шина 312A содержит следующие ординаты: [ft2(t0) и ft3(t0)] . Аналогичным образом схема 314 принимает оцифрованное значение L и выбирает составные функции абсолютного давления, имеющие ненулевое значение на оцифрованном значении L. Если бы данное оцифрованное значение L входило в обе составные функции L, схема 314 выдала бы два значения на шину 314A, каждое из которых было бы ординатой выбранной составной функции. В частности, для L= l0 шина 314A включает следующие ординаты: [f11(l0), f12(l0)].
Логическая схема размытого И 316 формирует все индивидуальные трехэлементные комбинации ординат, которые она принимает из схем 310-314 (где каждая комбинация содержит одно значение из каждой из трех шин 310A, 312A и 314A), и выдает размытое И (минимум) для каждой из индивидуальных комбинаций на шину 316A. Для группы значений P, Т, L в приведенном выше примере набор индивидуальных комбинаций ординат составных функций выглядит следующим образом:
[fp2 (P0) ft2 (t0) f11 (l0)]
[fp2 (P0) ft2 (t0) f12 (l0)]
[fp2 (P0) ft3 (t0) f11 (l0)]
[fp2 (P0) ft3 (t0) f12 (l0)]
[fp3 (P0) ft2 (t0) f11 (l0)]
[fp3 (P0) ft2 (t0) f12 (l0)]
[fp3 (P0) ft3 (t0) f11 (l0)]
[fp3 (P0) ft3 (t0) f12 (l0)]
[fp4 (P0) ft2 (t0) t11 (l0)]
[fp4 (P0) ft2 (t0) f12 (l0)]
[fp4 (P0) ft3 (t0) f11 (l0)]
[fp4 (P0) ft3 (t0) f12 (l0)]
Эффект логической схемы размытого И 316 состоит в том, что берут составные функции для отдельных переменных P, Т, L и формируют составные функции для нескольких переменных в пространстве P-T-L. Хотя это невозможно представить графически, схема 316 создает в пространстве P-T-L набор из 24 составных функций для трех переменных, полученных из четырех одномерных составных функций P, трех Т и двух L. Имеется 24 компенсационные формулы, соответствующие этим 24 составным функциям. В целом число создаваемых составных функций для нескольких переменных равно произведению числа составных функций, определенного для каждой отдельной переменной. На фиг. 6 представлен пример составных функций для нескольких переменных, полученных для двух переменных P и Т. 12 перекрывающихся пятигранных составных функций двух переменных определены в пространстве P-Т из четырех треугольных составных функций P и трех треугольных составных функций Т. Каждая составная функция нескольких переменных соответствует некоторой компенсационной формуле, и ординату составной функции нескольких переменных (выход размытого И) называют "силой правила", которое описывает меру, до которой можно смоделировать компенсированное давление с помощью соответствующей компенсационной формулы.
Схема 316 выбирает те компенсационные формулы, которые соответствуют каждому выходу "силы правила" на шине 316B. Шина 316B имеет столько сигналов, сколько, есть компенсационных формул. Значение "один", соответствующее конкретной компенсационной формуле, показывает, что она выбрана для использования в схеме оценки компенсационной формулы 304. В нашем конкретном примере каждая из 12 сил правила определяет некоторую точку на поверхности 12 отдельных пятигранников, так что выбирают 12 компенсационных формул (из общего числа 24).
ЗУ 308 сохраняет форму и характеристические постоянные для каждой из компенсационных формул. Схема оценки компенсационной формулы 304 находит постоянные для выбранных компенсационных формул, указанных через шину 316B, из ЗУ 308 и вычисляет поправочное значение, соответствующее каждой из выбранных компенсационных формул. Схема сложения 306 принимает поправочное значение и силы правила для каждой из выбранных областей и умножает поправочные значения на весовой коэффициент - соответствующую силу правила. Взвешенное среднее представлено уравнением 4. Характеристические постоянные, хранящиеся в ЗУ 308, являются результатом подгонки методом взвешенных наименьших квадратов между действительными рабочими характеристиками сенсора и выбранной формой компенсационной формулы для данной компенсационной формулы. (Подгонку методом взвешенных наименьших квадратов выполняют во время изготовления, а не при эксплуатации устройства.) Подгонку методом взвешенных наименьших квадратов получают из уравнения:
b=p-1s (8)
где b - вектор nx1 вычисленных характеристических коэффициентов,
р - взвешенная ковариантная матрица пхп матрицы входных данных х и
s - взвешенный ковариантный вектор nx1 x с y.
Матрица данных х имеет размер mxn, где каждая строка состоит из m векторов данных, представляющих одну из характеристических точек m (P, Т, L).
В альтернативном варианте компенсационной схемы 58, показанной на фиг. 5, логическая схема размытого И 316 исключена и схемы составной функции 310-314 заменены тремя подробно определенными трехмерными составными функциями, имеющими форму радиальной основной функции, представленной в целом как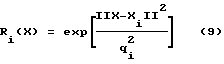
В радиальной основной функции X является трехмерным вектором, компоненты которого - оцифрованные значения P, Т, L, Хi - трехмерный вектор, определяющий центр функции пространства P-Т-L, а g регулирует ширину функции. Набор многомерных составных функций, таких как радиальные основные функции, эффективно заменяет функцию логической схемы размытого И 316, поскольку логическая схема размытого И обеспечивает набор многомерных составных функций из наборов одномерных составных функций.
Изобретение особенно подходит для использования в датчике с двумя сенсорами перепада давления. На фиг. 7 показана ошибка сенсора на соответствующих осях у 400, 402, нанесенная как функция определяемого перепада давления на осях x 404, 406 для двух сенсоров давления A и B (маркированные), каждый из которых подключен как показано для сенсора 54A на фиг. 2. Сенсор A определяет широкий интервал давлений между 0 и 1000 фунтов на кв.дюйм (0-6894,8 кПа), тогда как сенсор B определяет давление на 1/10 диапазона другого сенсора, от 0 до 100 фунтов/кв.дюйм (0-689,5 кПа). Ошибка сенсора A больше при любом данном давлении, чем ошибка сенсора B при том же давлении. Датчик с двумя сенсорами, описанный выше, имеет выходной сигнал, характеризующий преобразованный выходной сигнал сенсора B при низких давлениях, но переключается на выходной сигнал, характеризующий преобразованный выходной сигнал сенсора A при более высоких давлениях. Такая схема компенсации обеспечивает плавный выходной сигнал датчика, когда тот переключается между сенсорами A и B. Так же, как описано в связи с фиг. 3A-D, выходной сигнал сенсора A рассматривается как одна переменная процесса, а выходной сигнал сенсора B - как другая переменная процесса. Как описано, каждой переменной процесса присваивают составную функцию и компенсационную формулу, которые показывают, в какой мере можно моделировать данную переменную процесса с помощью компенсационной формулы. Поправочное значение получают путем вычисления каждой из двух компенсационных формул и суммарную функцию умножают на поправочные значения и получают компенсированное давление. Эта схема компенсации является предпочтительной для датчиков с двумя сенсорами, так как выходной сигнал обоих сенсоров используют во всем интервале переключения давления ( т.е. вообще не отбрасываются данные давлений, измеренных в интервале переключения) с относительным взвешиванием выходного сигнала каждого сенсора, определенного по составной функции каждого сенсора. Применение предложенной схемы компенсации для двух сенсоров в равной степени касается и датчиков, имеющих множество сенсоров, определяющих одну и ту же переменную процесса, и датчиков с избыточными сенсорами, где каждый сенсор воспринимает тот же интервал переменных процесса, что и другой.
Хотя данное изобретение было описано со ссылкой на предпочтительные варианты, специалисты поймут, что можно внести изменения в форму и детали, не отходя от идеи и объема изобретения. Изобретение можно применить в устройствах за рамками систем управления и автоматизации технологического процесса, например, для компенсации положения управляющей поверхности в самолете. Виды переменных, используемых в компенсационной схеме, могут отличаться от ПП, а компенсационные формулы и составные функции могут отличаться от полиномов и суммирующая функция может быть нелинейной усредняющей функцией.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 1993 |
|
RU2139509C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЕМКОСТНОЙ ТЕМПЕРАТУРНОЙ КОМПЕНСАЦИИ И ДВУХПЛАСТИНЧАТЫЙ ЕМКОСТНОЙ ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1992 |
|
RU2108556C1 |
| УЛУЧШЕННАЯ КОМПЕНСАЦИЯ ТЕМПЕРАТУРЫ МНОГОПАРАМЕТРИЧЕСКОГО ДАТЧИКА ДАВЛЕНИЯ | 2009 |
|
RU2453931C1 |
| ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ С ВЫНЕСЕННОЙ ГЕРМЕТИЧНОЙ ДИАФРАГМОЙ И КОНТУРОМ КОРРЕКЦИИ И СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 1995 |
|
RU2145703C1 |
| ТРЕХПРОВОДНОЙ ПЕРЕДАТЧИК | 1992 |
|
RU2111543C1 |
| НОРМАЛИЗОВАННАЯ ДИНАМИКА ПРОЦЕССА | 2014 |
|
RU2633300C1 |
| ТЕХНОЛОГИЧЕСКОЕ ПЕРЕДАЮЩЕЕ УСТРОЙСТВО С МНОЖЕСТВОМ РЕЖИМОВ РАБОТЫ | 2005 |
|
RU2355010C2 |
| УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ СО СДВОЕННЫМИ ДАТЧИКАМИ | 1994 |
|
RU2143665C1 |
| Емкостный датчик давления | 1982 |
|
SU1421266A3 |
| ВНЕПУЛЬТОВЫЙ ДАТЧИК ДЛЯ ЗАПОМИНАНИЯ ИНФОРМАЦИИ | 1995 |
|
RU2143129C1 |
Используется для измерения переменной в автоматизированной системе управления технологическим процессом. Датчик содержит сенсор, который определяет первичную переменную процесса, такую, как перепад давления, и преобразователь, который преобразует определяемую переменную процесса в цифровую форму, Для повышения точности измерений производится компенсация ошибок, связанных с оцифровкой. Для этого запоминающее устройство в датчике хранит по меньшей мере две составные функции и набор компенсационных формул, каждая из которых соответствует некоторой составной функции. Схема выбора в датчике выбирает те составные функции, которые имеют ненулевое значение на оцифрованной переменной процесса, а корректировочная схема обеспечивает по меньшей мере одно поправочное значение, вычисленное из компенсационной формулы, соответствующей выбранной составной функции. Взвешивающая схема умножает каждое поправочное значение на его соответствующую выбранную составную функцию и складывает множимые для получения компенсированной переменной. Происходит повышение точности измерений при небольшом объеме вычислений. 6 с. и 11 з.п. ф-лы, 7 ил., 1 табл.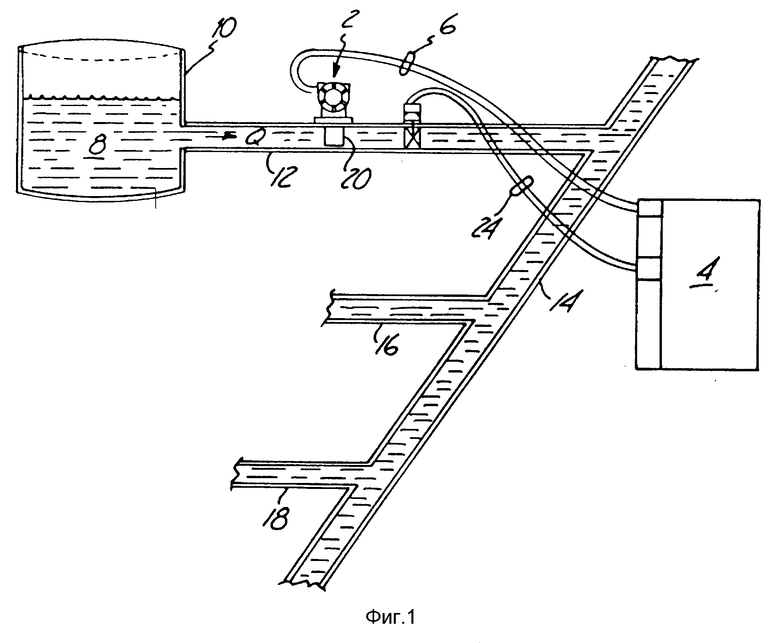
| EP, A1, 363958, 18.04.90 | |||
| PATENT ABSTRACTS OF JAPAN | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| DE, D 68912499, 03.03.94 | |||
| DE, T 68912499, 21.07.94 | |||
| US, A1 4966118, 30.10.90 | |||
| US, A1, 5146898, 15.09.92 | |||
| US, A1 4926364, 15.05.90 | |||
| SU, A1 1691685, 15.11.91. | |||
