Изобретение относится к технике грузовых перевозок, а именно к транспортным средствам, приспособленным для перевозки невибростойких грузов, требующих защиты от вибраций и ударов, на большие расстояния, в том числе по рельсовым путям.
Известно транспортное средство для перевозки невибростойких материалов (а. с. СССР 1224196, кл. B 60 P 3/22, 1/64, 1988), содержащее раму с шарнирно закрепленным в ее задней части Г-образным надрамником, кузов, четыре основных амортизатора, установленных попарно между кузовом и надрамником со смещением верхней точки их крепления к поперечной и продольной осям кузова, и дополнительный амортизатор, установленный горизонтально между коротким плечом Г-образного рычага и передней стенкой кузова. Амортизаторы выполнены телескопическими с возможностью их вращения относительно точек закрепления. Каждый из них содержит цилиндр, поршень со штоком, две пружины, установленные с двух сторон поршня, дополнительную камеру, соединенную с основной камерой через решетку, выходные вентили, связанные с компрессором и дополнительной камерой. В результате обеспечивается повышение сохранности грузов путем снижения ударных нагрузок на кузов.
Недостатком данной конструкции транспортного средства является то, что она не обеспечивает необходимого уровня виброзащиты кузова, из-за ограниченной длины основных амортизаторов, а также из-за встречной установки пружин амортизаторные узлы имеют повышенную жесткость. Телескопическая конструкция амортизаторов, обладающая повышенным трением, не снижает вибрацию, тем самым снижаются качественные характеристики конструкции. Кроме того, расположение центра масс кузова выше нижних точек крепления телескопических амортизаторов приводит к снижению устойчивости и к увеличению горизонтальных колебаний.
Наиболее близким из известных технических решений является контейнеровоз (патент РФ по заявке N 96113499/28, B 60 P 1/00, 1998), содержащий Г-образную раму с закрепленными на конце горизонтальной полки двумя вертикальными стойками с опорными колесами и грузоподъемное устройство контейнера, расположенное на раме. Контейнеровоз снабжен механизмом подрессоривания контейнера, выполненным в виде основных амортизаторов, каждый из которых имеет упругий элемент, соединенный гибкой связью в виде маятникового подвеса с контейнером, создавая упругое гашение малых колебаний контейнера, и дополнительных амортизаторов в виде двух пар демпферов, создавая неупругое гашение больших колебаний контейнера.
Недостатком данной конструкции контейнеровоза является наличие упругого элемента в системе подрессоривания контейнера, выполненного в виде пружины большой длины и малой жесткости, что не обеспечивает стабильность упругой характеристики при изменении загрузки контейнера.
Известный контейнеровоз имеет сравнительно низкий технический уровень механизма подрессоривания, обусловленный отсутствием механизма регулирования жесткости, вследствие чего не достигается стабильность упругой характеристики, что не обеспечивает эффективное использование системы подрессоривания при большом изменении диапазона загрузки транспортного средства, тем самым снижаются эксплуатационные характеристики.
В этой связи важнейшей задачей является создание новой конструкции механизма подрессоривания с эффективной системой подрессоривания, обеспечивающей упругое гашение малых колебаний и неупругое гашение больших колебаний корпуса по всем координатам с использованием автоматического регулирования жесткости упругодемпфирующих опор при изменении загрузки грузовой платформы и тем самым обеспечивающей защиту грузов от вибраций и ударов.
Техническим результатом заявленной грузовой платформы является эффективная защита корпуса от вибраций ударов по всем координатам при любых режимах движения грузовой платформы и степени ее загрузки.
Указанный технический результат достигается тем, что грузовая платформа содержит корпус, прямоугольную раму с закрепленными на продольных полках вертикальными стойками и установленную на опорных тележках и снабжена механизмом подрессоривания, выполненным в виде упругодемпфирующих опор, каждая из которых имеет упругий элемент в виде металлического стержня, жестко связанного с прямоугольной рамой и вторым концом шарнирно соединенного с малым плечом нижнего двуплечего рычага, шарнирно установленного на прямоугольной раме, на большем плече которого установлен механизм регулирования жесткости упругодемпфирующей опоры, выполненный в виде ролика перемещаемого вдоль направляющей большого плеча нижнего двуплечего рычага посредством гибкой тяги, один конец которой шарнирно соединен с вертикальной стойкой, а другой шарнирно соединен с внешним плечом верхнего двуплечего рычага, шарнирно установленного на вертикальной стойке, обеспечивая стабильность упругой характеристики упругодемпфирующей опоры, а гибкий маятниковый подвес упругодемпфирующей опоры, шарнирно соединен с внутренним плечом верхнего двуплечего рычага и корпусом, обеспечивая упругое гашение малых колебаний корпуса, при этом каждый демпфер шарнирно соединен с вертикальной стойкой и корпусом, обеспечивая неупругое гашение больших колебаний корпуса.
Разработка новой конструкции механизма подрессоривания, выполненного в виде упругодемпфирующих опор с новым упругим элементом, расположенным вдоль грузовой платформы и выполненным в виде металлического стержня заданной жесткости, имеющего сравнительно малый вес и работающего на растяжение, тем самым обеспечивается упругое гашение малых колебаний корпуса и плавность хода грузовой платформы.
Введение механизма регулирования жесткости упругодемпфирующей опоры за счет изменения передаточного отношения нижнего двуплечего рычага и перераспределения усилий между ветвями тяги обеспечивает автоматическое регулирование жесткости упругодемпфирующей опоры в соответствии с изменением загрузки грузовой платформы, и тем самым достигается стабильность упругой характеристики.
Проведенный заявителем анализ уровня техники, включающий поиск по патентам и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения, а определение из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности признакам аналога, позволил выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию изобретательского уровня, заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники.
Следовательно, заявленное изобретение соответствует требованию "изобретательский уровень".
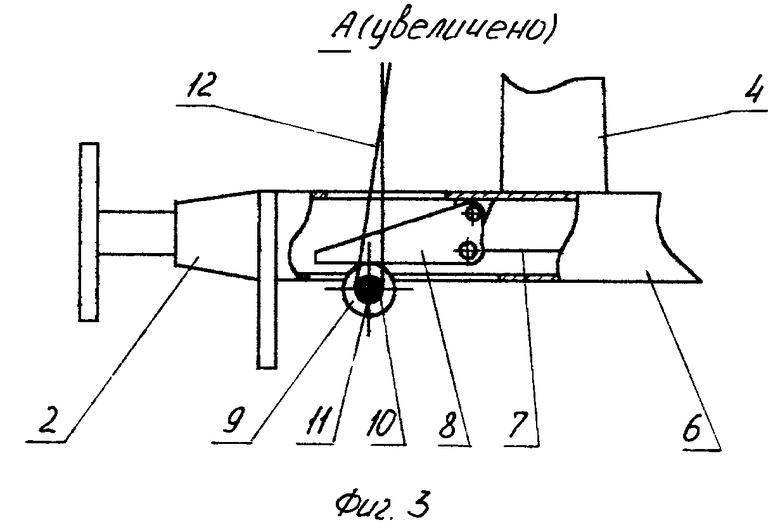
На фиг. 1 изображена грузовая платформа, вид сбоку; на фиг. 2 - грузовая платформа, вид сверху; на фиг. 3 - нижний двуплечий рычаг по A (на фиг. 1).
Грузовая платформа выполнена в виде прицепа, содержит корпус 1, прямоугольную раму 2, установленную на опорных тележках 3, и снабжена механизмом подрессоривания корпуса (фиг. 1, 2). По углам прямоугольной рамы 2 закреплены вертикальные стойки 4, каждая из которых установлена на пересечении поперечной 5 и продольной 6 полок.
Механизм подрессоривания выполнен в виде упругодемпфирующих опор, каждая из которых имеет упругий элемент 7 в виде металлического стержня, расположенного параллельно продольной полке 6 и жестко связанного с прямоугольной рамой 2 и вторым концом шарнирно соединенного с малым плечом нижнего двуплечего рычага 8 (фиг. 3), шарнирно установленного на прямоугольной раме 2, на большем плече которого установлен механизм регулирования жесткости упругодемпфирующей опоры, выполненный в виде ролика 9, на оси которого установлен блок 10 с возможностью вращения относительно ролика 9 в пределах упругой деформации промежуточного элемента 11, например сайлентблока, и перемещаемого вдоль направляющей большого плеча нижнего двуплечего рычага 8 посредством гибкой тяги 12, которая одним концом шарнирно соединена с вертикальной стойкой 4, в средней части перекинута через блок 10, а другим концом шарнирно соединена с внешним плечом верхнего двуплечего рычага 13, шарнирно установленного на вертикальной стойке 4, а гибкий маятниковый подвес 14 упругодемпфирующей опоры шарнирно соединен с внутренним плечом верхнего двуплечего рычага 13 и корпусом 1, при этом каждый демпфер 15 шарнирно соединен с вертикальной стойкой 4 и корпусом 1.
Усилие веса корпуса 1 посредством гибкого маятникового подвеса 14 и верхнего двуплечего рычага 13 передается на левую ветвь тяги 12 (фиг. 1, 3). Суммарное усилие левой и правой ветвей тяги 12 передается на нижний двуплечий рычаг 8 и далее на упругий элемент 7, воспринимающий усилие в зависимости от передаточного отношения нижнего двуплечего рычага 8. Передаточное отношение нижнего двуплечего рычага 8 является переменной величиной, зависящей от текущего положения ролика 9 механизма регулирования жесткости. Распределение усилий между левой и правой ветвями тяги 12 происходит в зависимости от изменения расстояния, на котором соответствующая ветвь тяги 12 проходит относительно ролика 9 в точке касания направляющей большого плеча нижнего двуплечего рычага 8. Для обеспечения автоматического изменения жесткости упругодемпфирующих опор в заданных пределах в соответствии с изменением загрузки грузовой платформы регулируется подбор геометрических параметров механизма регулирования жесткости.
Гибкие маятниковые подвесы 14 выполнены в виде металлических тросов, верхние концы которых шарнирно соединены с внутренними плечами верхних двуплечих рычагов 13, а нижние концы шарнирно соединены с корпусом 1 (фиг. 1, 2). Нижние точки креплений гибких маятниковых подвесов 14 лежат в горизонтальной плоскости, проходящей через центр тяжести корпуса 1, обеспечивая устойчивость корпуса 1. Достаточная длина гибких маятниковых подвесов 14 и наличие упругих элементов 7 малой жесткости обеспечивает низкую частоту собственных колебаний корпуса 1 по всем координатам. Демпферы 15 выполнены, например, в виде гидравлических амортизаторов, которые практически не создают сопротивления малым колебаниям корпуса 1 и увеличивают сопротивление при его больших колебаниях. В результате создается упругое гашение высокочастотных колебаний корпуса 1 и неупругое гашение его больших низкочастотных колебаний, что обеспечивает эффективную виброзащиту корпуса по всем координатам при любых режимах движения грузовой платформы.
Грузовая платформа работает следующим образом.
При движении грузовой платформы, выполненной в виде прицепа, ее прямоугольная рама 2 совершает вынужденные колебания, вызванные неровностями пути (фиг. 1, 2). Распространение колебаний на корпус 1 грузовой платформы блокируется механизмом подрессоривания. Перемещение корпуса 1 относительно прямоугольной рамы 2 происходит за счет перемещения гибких маятниковых подвесов 14, шарнирно соединенных с внутренним плечом верхнего двуплечего рычага 13 и корпусом 1, каждый из которых поворачивает верхний двуплечий рычаг 13, шарнирно установленный на вертикальной стойке 4, который перемещает левую ветвь тяги 12, шарнирно соединенную с вертикальной стойкой 4, средней частью перекинутую через блок 10 и другим концом шарнирно соединенную с внешним плечом верхнего двуплечего рычага 13, что приводит к повороту блока 10 относительно ролика 9 в пределах упругой деформации промежуточного элемента 11 (фиг. 3). При этом ролик 9 из-за действия сил инерции не перемещается вдоль направляющей нижнего двуплечего рычага 8, а тяга 12 поворачивает нижний двуплечий рычаг 8, шарнирно установленный на прямоугольной раме 2, что приводит к растяжению (сжатию) упругого элемента 7, выполненного в виде металлического стержня, жестко связанного с прямоугольной рамой 2 и вторым концом шарнирно соединенного с малым плечом нижнего двуплечего рычага 8.
Большие низкочастотные колебания корпуса 1, возникающие при прямолинейном равномерном движении грузовой платформы с малыми скоростями, соответствующими зоне резонансных колебаний, неупруго гасятся демпферами 15, шарнирно соединенными с вертикальными стойками 4 и корпусом 1 (фиг 1, 2).
Малые высокочастотные колебания корпуса 1, возникающие при прямолинейном равномерном движении грузовой платформы с большими скоростями, выше резонансной зоны, упруго гасятся упругими элементами 7 и гибкими маятниковыми подвесами 14, демпфирование колебаний осуществляется за счет трения в шарнирах. Влияние демпферов 15 практически отсутствует.
При движении грузовой платформы по радиусу или при ее разгоне или торможении, корпус 1 под действием сил инерции отклоняется на гибких маятниковых подвесах в горизонтальной плоскости относительно прямоугольной рамы 2, соответственно в поперечном или продольном направлениях от своего положения устойчивого равновесия. Ограничение отклонения корпуса 1 осуществляется демпферами 15.
При изменении загрузки грузовой платформы статическое положение корпуса 1 относительно прямоугольной рамы 2 изменяется, что приводит к перемещению гибких маятниковых подвесов 14, шарнирно соединенных с внутренними плечами верхних двуплечих рычагов 13 и корпусом 1, каждый из которых обеспечивает поворот верхнего двуплечего рычага 13, который перемещает левую ветвь тяги 12, шарнирно соединенную с вертикальной стойкой 4, средней частью перекинутую через блок 10 и другим концом шарнирно соединенную с внешним плечом верхнего двуплечего рычага 13 (фиг. 1, 2), тем самым обеспечивается поворот блока 10, при этом ролик 9 перемещается вдоль направляющей большого плеча нижнего двуплечего рычага 8, тем самым изменяя его передаточное отношение.
Суммарное усилие левой и правой ветвей тяги 12 передается на нижний двуплечий рычаг 8 и далее на упругий элемент 7, воспринимающий усилие в зависимости от передаточного отношения нижнего двуплечего рычага 8. Распределение усилий между левой и правой ветвями тяги 12 происходит в зависимости от изменения расстояния, на котором соответствующая ветвь тяги 12 проходит относительно ролика 9 в точке касания направляющей большого плеча нижнего двуплечего рычага 8. Перемещение ролика 9 происходит до тех, пор пока усилие в левой ветви тяги 12 не станет равно весу груза, приходящегося на данную упругодемпфирующую опору, что обеспечивает автоматическое регулирование жесткости за счет изменения передаточного отношения нижнего двуплечего рычага 8 и перераспределения усилий между левой и правой ветвями тяги 12.
Применение грузовой платформы, снабженной механизмом подрессоривания в сочетании с механизмом регулирования жесткости, создавая эффективную систему подрессоривания, обеспечивая упругое гашение малых высокочастотных колебаний корпуса и неупругое гашение его больших низкочастотных колебаний при любых режимах движения грузовой платформы и наличие автоматического регулирования жесткости упругодемпфирующих опор, приводит к стабильности упругой характеристики при любой степени загрузки грузовой платформы и эффективной защите грузов от вибраций и ударов.
Таким образом, вышеизложенное свидетельствует о выполнении при использовании заявленного изобретения следующей совокупности условий:
- грузовая платформа, воплощающая заявленное изобретение при его осуществлении, предназначена для универсального применения при перевозке невибростойких грузов с использованием эффективной системы подрессоривания по всем координатам и автоматического регулирования жесткости упругодемпфирующих опор при изменении загрузки, обеспечивает эффективную защиту грузов от вибраций и ударов;
- для заявленного изобретения, в том виде как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления в соответствии с описанием и прилагаемым чертежом;
- грузовая платформа, воплощающая заявленное изобретение при его осуществлении, способна обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленное изобретение соответствует требованию "промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТЕЙНЕРОВОЗ | 1996 |
|
RU2115571C1 |
| КОНТЕЙНЕРОВОЗ | 2002 |
|
RU2217330C1 |
| КОНТЕЙНЕРОВОЗ | 2002 |
|
RU2217329C1 |
| КОНТЕЙНЕРОВОЗ | 2000 |
|
RU2174921C1 |
| КОНТЕЙНЕРОВОЗ | 2003 |
|
RU2239572C2 |
| ШАГАЮЩАЯ ОПОРА | 1994 |
|
RU2086450C1 |
| ШАГАЮЩАЯ МАШИНА | 1995 |
|
RU2099230C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ, ДЕЙСТВУЮЩИХ НА КОЛЕСО | 2000 |
|
RU2181194C2 |
| ПОДВЕСКА ВЕДУЩИХ КОЛЕС ГРУЗОВОЙ ПЛАТФОРМЫ С ПОВЫШЕННЫМИ ЭКСПЛУАТАЦИОННЫМИ СВОЙСТВАМИ | 2021 |
|
RU2774205C1 |
| ЗАДНЯЯ ПОДВЕСКА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2696049C1 |

Изобретение относится к грузовым перевозкам, а именно к транспортным средствам, приспособленным для перевозки невибростойких грузов, требующих защиты от вибраций и ударов, на большие расстояния, в том числе по рельсовым путям. Грузовая платформа содержит корпус (1), установленную на опорных тележках прямоугольную раму (2) с закрепленными на продольных полках вертикальными стойками (4) и механизм подрессоривания, выполненный в виде упругодемпфирующих опор с упругим элементом, жестко связанным с прямоугольной рамой. Второй конец упругого элемента посредством нижнего двуплечего рычага, шарнирно установленного на прямоугольной раме, соединен с механизмом регулирования жесткости упругодемпфирующей опоры, связанным с нижним двуплечим рычагом, вертикальной стойкой и установленным на ней верхним двуплечим рычагом. Гибкий маятниковый подвес упругодемпфирующей опоры шарнирно соединен с верхним двуплечим рычагом и корпусом, обеспечивая упругое гашение малых колебаний корпуса, при этом каждый демпфер шарнирно соединен с вертикальной стойкой и корпусом, обеспечивая неупругое гашение больших колебаний корпуса. Изобретение позволяет повысить эффективность защиты от вибраций и ударов. 3 ил.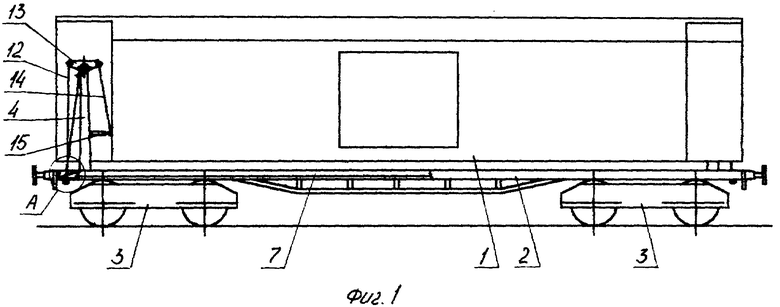
Грузовая платформа, содержащая корпус, прямоугольную раму с закрепленными на продольных полках вертикальными стойками, установленную на опорных тележках, отличающаяся тем, что она снабжена механизмом подрессоривания, выполненным в виде упругодемпфирующих опор, каждая из которых имеет упругий элемент в виде металлического стержня, жестко связанного с прямоугольной рамой, и вторым концом шарнирно соединенного с малым плечом нижнего двуплечего рычага, шарнирно установленного на прямоугольной раме, на большем плече которого установлен механизм регулирования жесткости упругодемпфирующей опоры, выполненный в виде ролика, перемещаемого вдоль направляющей большого плеча нижнего двуплечего рычага посредством гибкой тяги, один конец которой шарнирно соединен с вертикальной стойкой, а другой шарнирно соединен с внешним плечом верхнего двуплечего рычага, шарнирно установленного на вертикальной стойке, обеспечивая стабильность упругой характеристики упругодемпфирующей опоры, а гибкий маятниковый подвес упругодемпфирующей опоры шарнирно соединен с внутренним плечом верхнего двуплечего рычага и корпусом, обеспечивая упругое гашение малых колебаний корпуса, при этом каждый демпфер шарнирно соединен с вертикальной стойкой и корпусом, обеспечивая неупругое гашение больших колебаний корпуса.
| КУЗОВ ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ПЕРЕВОЗКИ НЕВИБРОСТОЙКИХ ГРУЗОВ | 1991 |
|
RU2026212C1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| ВОЗДУХОЗАБОРНИК ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1998 |
|
RU2155879C2 |
