Предлагаемые объекты изобретения объединены единым изобретательским замыслом, относятся к радиотехнике и связи, а именно к адаптивной пространственной фильтрации сигналов, реализуемой в адаптивных антенных решетках, и могут быть использованы в системах радиосвязи, функционирующих в условиях сложной помеховой обстановки, например в системах радиосвязи с подвижными объектами (ПО), при необходимости достижения более высокого уровня помехозащищенности приема сигналов.
Известны способы адаптивной пространственной фильтрации (АПФ) сигналов, реализуемые в адаптивных антенных решетках (ААР), например, способ АПФ сигналов, реализованный в ААР по заявке Японии N 57-112564 от 02.04.1992 г.
Данный способ предусматривает прием сигналов в N пространственно разнесенных точках, где N ≥ 2, выбор из N принятых сигналов Ml сигналов, где 2≤Ml≤N, l - количество выбранных сигналов (l=N, N-1, N-2, ..., 2), расчет весовых коэффициентов (ВК), взвешенное суммирование Ml выбранных сигналов, оценку взвешенно суммированного (выходного) сигнала. (Оценка в данном случае характеризует качество принятого полезного сигнала, под которым будем понимать отношение сигнал/(помеха + шум) (ОСПШ) на выходе ААР). В случае, когда качество выходного сигнала не удовлетворяет требуемому значению, принимается решение на выбор новых M1 сигналов и так далее. При необходимости процедура выбора новых M1 сигналов циклически повторяется. При этом расчет ВК осуществляется по алгоритму минимизации мощности сигнала (ММВ) на выходе ААР.
Однако указанный аналог имеет недостатки:
низкая помехозащищенность приема сигналов, так как расчет ВК должен производиться в те моменты времени, когда на входе ААР полезный сигнал отсутствует (Pс=0) или полезный сигнал присутствует, но выполняется условие Pп > Pс (здесь Pп, Pс - мощность помехи и полезного сигнала соответственно), а в случае, если на входе ААР Pп ≤ Pс, может произойти непреднамеренное подавление полезного сигнала в процессе адаптации [1];
неэффективное использование ресурса антенных элементов (АЭ), так как на основе оценки выходного сигнала принимается решение на выбор числа АЭ, а соответственно, и числа сигналов Ml, для последующей АПФ и возможны ситуации, когда один или несколько АЭ не будут использоваться для приема сигналов.
Известен также способ АПФ сигналов, реализованный в ААР по патенту РФ N 2090960 от 20.09.1997 г.
Данный способ предусматривает прием сигналов в N пространственно разнесенных точках, где N≥2, расчет N весовых коэффициентов, выбор i-го ВК, где i-1, 2, . . .N, взвешенное суммирование принятых сигналов, оценку качества взвешенного суммированного (выходного) сигнала. В данном случае, если по результатам оценки качество выходного сигнала ниже требуемой величины, то принимается решение на выбор новых предварительно рассчитанных ВК. При необходимости процедура выбора новых ВК циклически повторяется. При этом расчет ВК осуществляется по алгоритму MMB.
Однако указанный аналог имеет недостаток: - низкую помехозащищенность приема сигналов, так как расчет ВК должен производиться в те моменты времени, когда на входе ААР полезный сигнал отсутствует (Pс=0) или полезный сигнал присутствует, но выполняется условие Pп > Pс, а в случае, если на входе ААР Pп ≤ Pс, может произойти непреднамеренное подавление полезного сигнала в процессе адаптации [1].
Наиболее близким по своей технической сущности к заявляемому способу является способ АПФ сигналов, реализованный в ААР по патенту США N 4.713.668 от 15.12.1987 года.
Данный способ-прототип АПФ сигналов предусматривает прием сигналов в N пространственно разнесенных точках, расчет ВК и взвешенное суммирование принятых сигналов. При этом расчет ВК осуществляется по алгоритму максимизации отношения сигнал/(помеха + шум) (МОСП) на выходе ААР, согласно выражению
где Wi(t) - текущее значение i-го ВК, Δt - интервал временной дискретизации, Vyi - значение i-го управляющего сигнала, Y(t) - взвешенно суммированный (выходной) сигнал, Xi(t) - сигнал, принятый i-м АЭ, μ - коэффициент усиления (передачи), * - обозначение операции комплексного сопряжения.
Применение данного способа основывается на предположении, что управляющие сигналы Vyi,  точно определяют направление прихода полезного сигнала, его частоту и учитывают характеристики собственно АР, то есть Vyi = Vci, где Vci - сигналы, принимаемые i-ми АЭ (сигналы, описывающие волновой фронт полезного сигнала). В дальнейшем для упрощения записи управляющие сигналы Vyi, а также сигналы Vci, описывающие волновой фронт полезного сигнала, представим в виде N-мерных векторов
точно определяют направление прихода полезного сигнала, его частоту и учитывают характеристики собственно АР, то есть Vyi = Vci, где Vci - сигналы, принимаемые i-ми АЭ (сигналы, описывающие волновой фронт полезного сигнала). В дальнейшем для упрощения записи управляющие сигналы Vyi, а также сигналы Vci, описывающие волновой фронт полезного сигнала, представим в виде N-мерных векторов  и
и  , здесь θy и θc - предполагаемое и реальное направление прихода сигнала, T - знак, обозначающий операцию транспонирования. Кроме того, для удобства записи и упрощения математических выкладок выражение (1) представим в векторной форме
, здесь θy и θc - предполагаемое и реальное направление прихода сигнала, T - знак, обозначающий операцию транспонирования. Кроме того, для удобства записи и упрощения математических выкладок выражение (1) представим в векторной форме
где  - N-мерный вектор весовых коэффициентов (ВВК)
- N-мерный вектор весовых коэффициентов (ВВК)  - вектор, составляющими которого являются сигналы с выходов АЭ
- вектор, составляющими которого являются сигналы с выходов АЭ 
 - взвешенно суммированный сигнал (выходной сигнал ААР).
- взвешенно суммированный сигнал (выходной сигнал ААР).
Однако способ-прототип имеет недостаток - низкую помехозащищенность приема сигналов, так как основой применимости данного способа является совпадение управляющих сигналов (сигналов управления характеристикой направленности ААР) Vyi, с сигналами Vci, принимаемыми i-ми АЭ (сигналы, описывающие волновой фронт полезного сигнала)  Вместе с тем в реальных условиях направление прихода полезного сигнала θc известно, как правило, лишь с точностью до некоторого углового сектора θc∈[θy1÷θy2], где θy1,θy2 - левая и правая границы сектора, в пределах которого ожидается приход полезного сигнала. Данная неопределенность ведет в тому, что предполагаемое направление прихода полезного сигнала θy будет не равно истинному направлению прихода полезного θc(θy≠ θc) и вектор управляющих сигналов
Вместе с тем в реальных условиях направление прихода полезного сигнала θc известно, как правило, лишь с точностью до некоторого углового сектора θc∈[θy1÷θy2], где θy1,θy2 - левая и правая границы сектора, в пределах которого ожидается приход полезного сигнала. Данная неопределенность ведет в тому, что предполагаемое направление прихода полезного сигнала θy будет не равно истинному направлению прихода полезного θc(θy≠ θc) и вектор управляющих сигналов  не будет коллинеарен
не будет коллинеарен  (не совпадает с точностью до постоянного коэффициента). Вместе с тем, если
(не совпадает с точностью до постоянного коэффициента). Вместе с тем, если  не коллинеарен
не коллинеарен  , то применение данного способа АПФ сигналов может привести к непреднамеренному подавлению полезного сигнала, причем глубина непреднамеренного подавления полезного сигнала прямо пропорционально зависит от входного отношения сигнал/шум и величины ошибки в априорных данных о направлении прихода полезного сигнала (углового расстояния между векторами
, то применение данного способа АПФ сигналов может привести к непреднамеренному подавлению полезного сигнала, причем глубина непреднамеренного подавления полезного сигнала прямо пропорционально зависит от входного отношения сигнал/шум и величины ошибки в априорных данных о направлении прихода полезного сигнала (углового расстояния между векторами 
Известны устройства, реализующие АПФ сигналов, например, ААР по патенту РФ N 2099838, опублик. 20.12.1997 года, бюл. N 35.
Данное устройство состоит из N АЭ, соединенных через комплексные весовые умножители (КВУ) с соответствующими входами общего сумматора, N адаптивных контуров и блока максимизации мощности сигнала. Первые входы N адаптивных контуров соединены с выходами соответствующих АЭ, вторые входы N адаптивных контуров соединены с выходом общего сумматора, а первые выходы N адаптивных контуров подключены к соответствующим входам КВУ. Первые и вторые входы блока максимизации мощности соединены соответственно с первыми и вторыми выходами адаптивных контуров, а выходы соединены с соответствующими третьими входами адаптивных контуров. Выход общего сумматора является выходом ААР.
Однако известное устройство имеет недостаток - низкую помехозащищенность приема сигналов, ввиду того, что расчет ВК должен производиться в те моменты времени, когда на входе ААР отсутствует полезный сигнал, то есть она применима только для приема сигналов, имеющих паузу в процессе их передачи (например, сигналов с псевдослучайной перестройкой рабочей частоты). Расчет ВК при наличии на входе полезного сигнала может привести к его непреднамеренному подавлению.
Известна также ААР по заявке Японии N 57-112564 от 02.04.1992 г.
Данное устройство состоит из N антенных элементов, N взвешивающих схем (комплексных весовых умножителей), N переключателей, сумматора, блока обработки сигналов, блока управления, причем i-е АЭ через переключатели подключены к первым входам i-х взвешивающих схем и блока обработки сигналов, i-е выходы блока обработки сигналов соединены со вторыми входами i-х взвешивающих схем, выходы которых соединены с i-ми входами сумматора, выход которого, соединенный со вторым входом блока обработки сигналов и входом блока управления, является выходом ААР, а i-е выходы блока управления подключены к i-м переключателям.
Однако данное устройство имеет недостатки:
низкую помехозащищенность приема сигналов, так как расчет ВК должен производиться в те моменты времени, когда на входе ААР полезный сигнал отсутствует (Pс = 0) или полезный сигнал присутствует, но выполняется условие Pп > Pс, а в случае, если на входе ААР Pп ≤ Pс, может произойти непреднамеренное подавление полезного сигнала в процессе адаптации [1];
неэффективное использование ресурса АЭ, так как на основе оценки выходного сигнала принимается решение на выбор числа АЭ, а соответственно, числа сигналов Ml для последующей АПФ, и возможны ситуации, когда один или несколько АЭ не будут использованы для приема сигналов.
Наиболее близким к заявляемому устройству по своей технической сущности является ААР, описанная в патенте США N 4.713.668 от 15.12.1987 года.
Устройство - прототип состоит из N антенных элементов, N блоков комплексного сопряжения, N комплексных весовых умножителей, N-входового общего сумматора, устройства ввода управляющих сигналов, вычитателя, блока оценки сигнала, N контуров адаптации, причем выход i-го АЭ, где i=1, 2, 3,...N, соединен с входом i-го блока комплексного сопряжения и с первым входом соответствующего i-го КВУ, выход i-го блока комплексного сопряжения соединен с сигнальным входом i-го контура адаптации, i-й выход устройства ввода управляющих сигналов соединен с управляющим входом i-го контура адаптации, выход которого соединен со вторым входом i-го КВУ, выход i-го КВУ соединен с i-м входом N-входового общего сумматора, выход сумматора, соединенный с первым входом вычитателя и входом блока оценки сигнала, является выходом ААР, выход блока оценки сигнала соединен со вторым входом вычитателя, выход которого соединен с информационными входами N-блоков адаптации. При этом i-й ВК рассчитывается согласно выражению (1).
Однако устройство-прототип имеет недостаток - низкую помехозащищенность приема сигналов, так в реальной сигнально-помеховой обстановке предполагаемое направление прихода полезного сигнала θy может существенно отличаться от реального θc и, соответственно, предварительно рассчитанный на основе априорной информации о параметрах полезного сигнала вектор управляющих сигналов  не будет коллинеарен
не будет коллинеарен  . Применение
. Применение  приведет к формированию максимума диаграммы направленности (ДН) ААР, ориентированного в направлении (θy), а следовательно, возможно непреднамеренное подавление полезного сигнала, причем глубина подавления полезного сигнала прямо пропорционально зависит от входного отношения сигнал/шум и величины ошибки в априорных данных (углового расстояния между векторами
приведет к формированию максимума диаграммы направленности (ДН) ААР, ориентированного в направлении (θy), а следовательно, возможно непреднамеренное подавление полезного сигнала, причем глубина подавления полезного сигнала прямо пропорционально зависит от входного отношения сигнал/шум и величины ошибки в априорных данных (углового расстояния между векторами 
Целью заявленных объектов изобретения является разработка способа и устройства АПФ сигналов, обеспечивающих более высокую помехозащищенность приема сигналов в случаях, когда направление прихода полезного сигнала известно с точностью до некоторого углового сектора [θy1÷θy2].
Поставленная цель достигается тем, что в известном способе, заключающемся в приеме сигналов в N пространственно разнесенных точках, где N ≥ 2, расчете ВК и взвешенном суммировании принятых сигналов, дополнительно генерируют первый и второй опорные сигналы с различными частотами. Каждый из этих сигналов разделяют на N равноамплитудных составляющих. После этого каждую из составляющих сдвигают по фазе на предварительно заданную величину, затем i-й принятый сигнал, где i=1, 2, ... N, и i-е составляющие первого и второго опорных сигналов суммируют. При этом расчет i-х ВК осуществляют согласно выражению
Wi(t+Δt) = Wi(t)-μ[Vyi-Y(t)Z
где Wi(t) - текущее значение i-го ВК, Wi(t+Δt) - значение i-го ВК в момент времени (t+Δt), Δt - интервал временной дискретизации, Vyi - значение i-го управляющего сигнала, Y(t) - взвешенно суммированный сигнал, Zi(t) - суммарный сигнал, полученный в результате сложения i-го принятого сигнала и i-х составляющих первого и второго опорных сигналов, μ - коэффициент усиления (передачи).
Для удобства записи и упрощения математических выкладок выражение (3) представим в векторной форме
где  - вектор, составляющими которого являются суммарные сигналы, полученные от сложения i-го принятого сигнала и i-х составляющих первого и второго опорных сигналов
- вектор, составляющими которого являются суммарные сигналы, полученные от сложения i-го принятого сигнала и i-х составляющих первого и второго опорных сигналов 
Поставленная цель в заявленном устройстве достигается тем, что в известную ААР, содержащую N АЭ, N блоков комплексного сопряжения, N комплексных весовых умножителей, N-входовый общий сумматор, устройство ввода управляющих сигналов, N контуров адаптации, причем вход i-го блока комплексного сопряжения соединен с первым входом соответствующего i-го КВУ, выход i-го блока комплексного сопряжения соединен с сигнальным входом i-го контура адаптации, а i-й выход устройства ввода управляющих сигналов соединен с управляющим входом i-го контура адаптации, выход которого соединен со вторым входом i-го КВУ, выход i-го КВУ соединен с i-м входом N-входового общего сумматора, выход которого является выходом ААР, дополнительно введены первый и второй генераторы опорных сигналов, первый и второй блоки фазовращателей, N трехвходовых сумматоров (в дальнейшем первый и второй генераторы опорных сигналов для упрощения записи будем называть первый и второй генераторы). Выход каждого i-го АЭ подключен к первому входу i-го трехвходового сумматора. Выход первого генератора подключен к входу первого блока фазовращателей, а выход второго генератора подключен к входу второго блока фазовращателей, i-й выход первого блока фазовращателей соединен со вторым входом i-го трехвходового сумматора, а i-й выход второго блока фазовращателей соединен с третьим входом i-го трехвходового сумматора. Выход i-го трехвходового сумматора соединен с первым входом i-го КВУ. Выход N-входового общего сумматора соединен с информационными входами N контуров адаптации. Кроме того, расчет ВК осуществляют согласно выражению (3).
Указанная выше совокупность отличительных существенных признаков, благодаря несущественному для полезного сигнала преобразованию сигналов, принимаемых АЭ в различных точках пространства, позволяет в условиях, когда направление прихода полезного сигнала известно с точностью до некоторого углового сектора, осуществить прием полезного сигнала при одновременном подавлении помех без существенного ухудшения ОСПШ на выходе устройства, реализующего заявляемый способ АПФ сигналов. Это достигается вследствие формирования более широкого главного лепестка диаграммы направленности (ДН) ААР, перекрывающего угловой сектор, в пределах которого ожидается приход полезного сигнала.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественные всем признакам заявленных технических решений, отсутствуют, что указывает на соответствие заявленных изобретений условию патентоспособности "новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявляемых объектов, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленных изобретений преобразований на достижение указанных технических результатов. Следовательно, заявленные изобретения соответствуют условию патентоспособности "изобретательский уровень".
Заявленный способ и устройство, его реализующее, поясняются чертежами: фиг. 1 - структурная схема ААР; фиг. 2 - структурная схема контура адаптации; фиг. 3 - структурная схема блока фазовращателей; фиг. 4 - график, иллюстрирующий результаты анализа эффективности заявленного способа АПФ сигналов и устройства, его реализующего.
Возможность реализации заявленного способа объясняется следующим образом.
Под адаптивной пространственной фильтрацией сигналов в общем случае понимают взвешенное суммирование сигналов, принимаемых в N-пространственно разнесенных точках (принимаемых на N-разнесенных в пространстве антенн), обеспечивающее в условиях априорной неопределенности о помеховой обстановке оптимизацию взвешенно-суммированного сигнала по критерию, предполагающему улучшение качества дальнейшей обработки сигналов, например, по критерию МОСП. При этом алгоритмом АПФ обычно называют математическое выражение (правило) расчета ВК [3].
Известный способ-прототип АПФ заключается в приеме в N пространственно разнесенных местах (приеме на N разнесенных в пространстве антенн) полезного сигнала s(t), помех  L - число помех (L ≤ N-1) и изотропного шума ш(t), причем Xi(t) = si(t) + pi(t) + ш(t), здесь si(t), pi(t) - полезный сигнал, l-я помеха, принимаемая i-м АЭ. Для наглядности будем считать, что s(t), pl(t), ш(t) взаимно некоррелированные, стационарные, эргодические случайные процессы. Будем считать также, что несущие частоты сигнала и помех тождественны, а источники сигнала и помех точечные по угловым размерам и находятся в дальней зоне, антенная решетка согласована по поляризации с электромагнитной волной принимаемых сигналов.
L - число помех (L ≤ N-1) и изотропного шума ш(t), причем Xi(t) = si(t) + pi(t) + ш(t), здесь si(t), pi(t) - полезный сигнал, l-я помеха, принимаемая i-м АЭ. Для наглядности будем считать, что s(t), pl(t), ш(t) взаимно некоррелированные, стационарные, эргодические случайные процессы. Будем считать также, что несущие частоты сигнала и помех тождественны, а источники сигнала и помех точечные по угловым размерам и находятся в дальней зоне, антенная решетка согласована по поляризации с электромагнитной волной принимаемых сигналов.
При этом ВВК, обеспечивающий управление амплитудно-фазовым распределением токов на выходах соответствующих АЭ, рассчитывают согласно выражению (2).
В данном способе при расчете ВВК помимо сигналов с выходов АЭ -  и предварительно рассчитанного (на основе априорной информации о частоте, направлении прихода полезного сигнала и с учетом характеристик собственно АР) вектора управляющих сигналов -
и предварительно рассчитанного (на основе априорной информации о частоте, направлении прихода полезного сигнала и с учетом характеристик собственно АР) вектора управляющих сигналов -  используется выходной сигнал АР (сигнал обратной связи) - Y(t). За счет использования сигнала обратной связи обеспечивается отслеживание текущих изменений сигнально-помеховой обстановки (подавление помех с изменяющимися пространственно-временными параметрами).
используется выходной сигнал АР (сигнал обратной связи) - Y(t). За счет использования сигнала обратной связи обеспечивается отслеживание текущих изменений сигнально-помеховой обстановки (подавление помех с изменяющимися пространственно-временными параметрами).
В случае, когда расчет ВВК осуществляется при отсутствии полезного сигнала, ВВК, рассчитываемый согласно выражению (2), при t _→ ∞ сходится к вектору, определяемому выражением
где Rпш - корреляционная матрица (КМ) помех и шума; β - нормирующий множитель.
При наличии на входе ААР (при расчете ВВК) полезного сигнала алгоритм расчета ВВК (2) при t _→ ∞ сходится к вектору, определяемому выражением
где Rxx = Rcc + Rпш, Rxx - КМ входных сигналов, Rсс - КМ полезного сигнала.
Для линейной эквидистантной АР, состоящей из идентичных и невзаимодействующих АЭ, вектор волнового фронта сигнала  может быть определен как
может быть определен как
где j - мнимая единица, ϕci - фазовый сдвиг сигнала, принимаемого i-м антенным элементом, к точке, принятой за фазовый центр АР, определяемая выражением
здесь di - расстояние от АЭ, выбранного за фазовый центр АР (как правило это первый АЭ) до i-го АЭ, λ - длина волны принимаемого сигнала (помехи).
Аналогично можно определить вектор управляющих сигналов
где ϕyi - фазовый сдвиг сигнала, принимаемого i-м АЭ, определяемый согласно выражению (8) с учетом замены реального направления прихода полезного сигнала θc предполагаемым направлением прихода θy.
Как уже отмечалось, недостатком рассмотренного способа-прототипа АПФ сигналов является низкая помехозащищенность приема сигналов при отсутствии точной априорной информации о направлении прихода полезного сигнала.
Дополнительные действия над сигналами позволяют в условиях, когда направление прихода полезного сигнала известно с точностью до некоторого углового сектора, сформировать более широкий главный лепесток ДН ААР, ориентированный в направлении данного углового сектора и перекрывающий его, и тем самым обеспечивают малую чувствительность заявляемого способа АПФ сигналов к неточностям в задании вектора управляющих сигналов  (неточностям априорных данных о направлении прихода полезного сигнала θy), устраняя таким образом недостаток способа-прототипа.
(неточностям априорных данных о направлении прихода полезного сигнала θy), устраняя таким образом недостаток способа-прототипа.
Возможность реализации заявляемого способа объясняется следующим образом.
Заявляемый способ, также как и способ прототип, предусматривает прием полезного сигнала, помех и изотропного шума в N пространственно разнесенных местах (прием на N разнесенных в пространстве антенн). Одновременно с приемом полезного сигнала, помех и изотропного шума генерируются два опорных сигнала F1(t), F2(t) с различными частотами, отличными от частоты принимаемого сигнала,
F1(t) = Aexp(jω1t), (10)
F2(t) = Aexp(jω2t), (11)
где A - амплитуда опорных сигналов, ω1,ω2 - несущие частоты первого и второго опорного сигналов. При этом частоты ω1,ω2 выбирают согласно условию
ω1<(ω0-Δω), ω2>(ω0+Δω), (12)
где ω0 - несущая частота принимаемого полезного сигнала, Δω - ширина спектра принимаемого полезного сигнала. Данное условие введено для того, чтобы опорные сигналы F1(t), F2(t) были отфильтрованы впоследствии во входных цепях преселектора радиоприемного устройства, с которым предполагается использовать устройство, реализующее заявляемый способ АПФ сигналов. Следует также отметить, что при выборе частот ω1,ω2 необходимо предусмотреть, чтобы опорные сигналы F1(t), F2(t) не попали в радиоприемное устройство по зеркальному и другим побочным каналам приема.
Далее каждый из данных опорных сигналов разделяют на N равноамплитудных составляющих, затем каждую из полученных составляющих сдвигают на предварительно заданную величину фазы Δϕ1i, Δϕ2i, то есть формируют сигналы

где A1i, A2i - амплитуда i-х составляющих первого и второго опорного сигналов (причем 
Фазовые сдвиги Δϕ1i,Δϕ2i выбирают согласно условий

где Si(θc-Δθ),Si(θc+Δθ) - сигналы на выходе i-го АЭ, приходящие соответственно с направлений θc-Δθ,θc+Δθ, где Δθ - максимальная ошибка в задании направления прихода полезного сигнала, причем θc-Δθ = θy1, θc+Δθ = θy2.
Необходимо заметить, что сигналы Si(θy1) и Si(θy2) реально на входе ААР не присутствуют, но их параметры можно рассчитать, так как известно направление их прихода θy1,θy2 и характеристики собственно АР. Расчет Si(θy1) и Si(θy2), представленных в виде N-мерных векторов 
 аналогичен расчету
аналогичен расчету  в соответствии с выражениями (7), (8) с учетом θy1,θy2.
в соответствии с выражениями (7), (8) с учетом θy1,θy2.
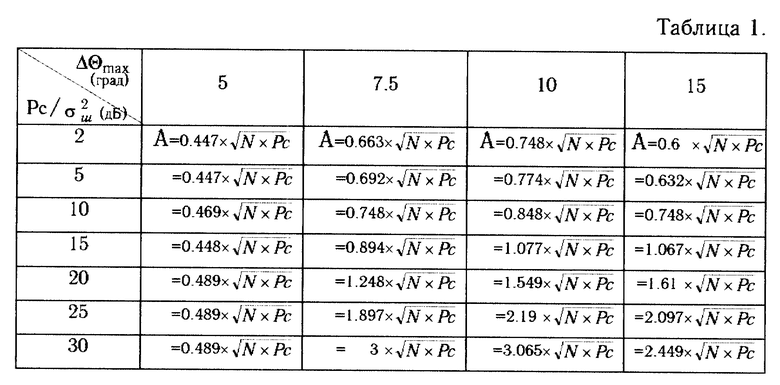
Значения амплитуды A сигналов на выходе первого и второго генераторов целесообразно выбирать согласно рекомендациям, представленным в табл. 1, с учетом сигнально-помеховой обстановки.
Здесь N - число АЭ, Pс - мощность сигнала на выходе АЭ, σ
Значения амплитуды (табл. 1) A сигналов на выходе первого и второго генераторов были получены на случай "наихудшей" сигнально-помеховой ситуации для работы ААР (под "наихудшей" сигнально-помеховой ситуацией будем понимать ситуацию, когда на входе ААР отсутствует помеха (Pп = 0), а ошибка в задании направлений прихода сигнала и входное отношение сигнал/шум принимают свои максимальные значения). Необходимо заметить, что зная значение амплитуды A сигналов на выходе первого и второго генераторов, а соответственно, и значения амплитуд  i-х составляющих опорных сигналов F1i(t), F2i(t), для наихудшего случая (в смысле наихудшей сигнально-помеховой ситуации для АПФ сигналов) мы можем утверждать, что в других случаях (наличие помехи на входе ААР (Pп ≠ 0)) данное значение амплитуды также обеспечит приемлемое значение выходного ОСПШ.
i-х составляющих опорных сигналов F1i(t), F2i(t), для наихудшего случая (в смысле наихудшей сигнально-помеховой ситуации для АПФ сигналов) мы можем утверждать, что в других случаях (наличие помехи на входе ААР (Pп ≠ 0)) данное значение амплитуды также обеспечит приемлемое значение выходного ОСПШ.
Значение Pс на выходе АЭ может быть непосредственно измерено измерителем мощности сигналов, если на входе ААР отсутствует помеха (Pп = 0). В случае, когда на входе ААР присутствует помеха, то есть Pп ≠ 0, значение Pс и σ
В случае реализации ААР на цифровых процессорах обработки сигналов (при этом КМ Rxx может быть нормирована) значения амплитуд A сигналов на выходе первого и второго генераторов целесообразно выбирать согласно рекомендациям, представленным в табл. 2 (без учета мощности полезного сигнала).
Осуществив преобразование первого и второго опорного сигнала (деление первого и второго опорного сигнала на N равноамплитудных составляющих и сдвиг по фазе каждой составляющей), получим N составляющих первого опорного сигнала (13) и N составляющих второго опорного сигнала (14), причем i-е составляющие первого и второго опорного сигнала будут совпадать с сигналами, которые были бы приняты в i-х точках пространства (i-ми АЭ) Si(θy1) и Si(θy2), с направлений θy1 и θy2 соответственно. Особенность этих сигналов состоит в том, что они не принимаются АР реально с указанных направлений, а искусственно формируются и вводятся в ААР после антенных элементов. Ввод сигналов F1i(t) и F2i(t) в каналы ААР осуществляется посредством суммирования i-х составляющих первого и второго опорного сигнала с i-ми сигналами, принятыми в i-х точках пространства
Для удобства записи и упрощения математических расчетов сигналы Xi(t), F1i(t), F2i(t) запишем в виде N-мерных векторов


Ввод сигналов F1i(t) и F2i(t) в каналы ААР позволит наряду с реально принятыми сигналами Xi(t) имитировать прием сигналов Si(θy1) = F1i(t), Si(θy2) = F2i(t) с направлений θy1 и θy2.
Очевидно, что с учетом  выражение для расчета ВВК примет вид (4) и процедура расчета ВВК (4) при t _→ ∞ будет сходиться к выражению
выражение для расчета ВВК примет вид (4) и процедура расчета ВВК (4) при t _→ ∞ будет сходиться к выражению
где RZZ = RXX + RFF1 + RFF2, RFF1, RFF2 - КМ первого и второго опорных сигналов.
При этом для корреляционных матриц RFF1, RFF2 справедлива одноранговая аппроксимация  (здесь H - знак, обозначающий операцию эрмитового сопряжения), а следовательно,
(здесь H - знак, обозначающий операцию эрмитового сопряжения), а следовательно,
RZZ = RПШ + B, (22)
где  определяется согласно выражению (7).
определяется согласно выражению (7).
Осуществив нормировку матрицы B, исходя из условия  = 1 и проанализировав ее элементы, несложно убедиться, что данные элементы имеют вид (здесь для наглядности мы полагаем, что Pс = 1, а также A=1)
= 1 и проанализировав ее элементы, несложно убедиться, что данные элементы имеют вид (здесь для наглядности мы полагаем, что Pс = 1, а также A=1)
где  - элемент, стоящий на пересечении k-й строки (k=1, 2, ... N) и i-го столбца матрицы B, ϕki= ϕck-ϕci; ϕck, ϕci - аргументы k-го и i-го элементов вектора
- элемент, стоящий на пересечении k-й строки (k=1, 2, ... N) и i-го столбца матрицы B, ϕki= ϕck-ϕci; ϕck, ϕci - аргументы k-го и i-го элементов вектора  (выражение (7)); Δϕki= ϕi(Δθ)-ϕk(Δθ); ϕi(Δθ), ϕk(Δθ), фазовые сдвиги, определяемые согласно выражению (8) при замене θc на величину Δθ.
(выражение (7)); Δϕki= ϕi(Δθ)-ϕk(Δθ); ϕi(Δθ), ϕk(Δθ), фазовые сдвиги, определяемые согласно выражению (8) при замене θc на величину Δθ.
С учетом формулы Эйлера запишем ,
,
а следовательно, выражение (23) примет вид
где βki= 1+2cos(Δϕki).
Вследствие того, что элементы матрицы B имеют вид (24), мы можем воспользоваться результатами работы [4] и утверждать, что использование алгоритма расчета ВВК (4) или (21) для АПФ сигналов в случае, когда направление прихода полезного сигнала известно с точностью до некоторого углового сектора, приведет к повышению ОСПШ на выходе ААР. Следовательно, помехозащищенность приема сигналов при использовании данной ААР увеличится.
Результаты имитационного моделирования позволяют сделать вывод о том, что заявляемый способ АПФ сигналов мало чувствителен к ошибкам в априорных данных о направлении прихода полезного сигнала (описание имитационного моделирования приведено на стр. 26).
Устройство, реализующее данный способ АПФ сигналов, показано на фиг. 1 и состоит из N антенных элементов 1 (11, 12, ... 1N), N блоков комплексного сопряжения 2 (21, 22, ... 2N), N комплексных весовых умножителей 3 (31, 32, . . . 3N), N-входового общего сумматора 4, устройства ввода управляющих сигналов 5, N контуров адаптации 6 (61, 62, ... 6N), первого и второго генераторов 7 (71, 72), первого блока фазовращателей 8, второго блока фазовращателей 9, N трехвходовых сумматоров 10 (101, 102, ... 10N). Выход каждого i-го антенного элемента 1, где i=1, 2, 3, ... N, подключен к первому входу i-го трехвходового сумматора 10. Выход i-го трехвходового сумматора 10 соединен с первым входом i-го комплексного весового умножителя 3 и через i-й блок комплексного сопряжения 2 подключен к сигнальному входу i-го контура адаптации 6. Выход i-го контура адаптации 6 соединен со вторым входом i-го КВУ 3. Выход i-го КВУ 3 соединен с i-м входом N-входового общего сумматора 4. Выход N-входового общего сумматора 4, соединенный с информационными входами N контуров адаптации 6, является выходом ААР. Выход первого генератора 71 подключен к входу первого блока фазовращателей 8, i-й выход первого блока фазовращателей 8 соединен с вторым входом i-го трехвходового сумматора 10. Выход второго генератора 72 подключен к входу второго блока фазовращателей 9, i-й выход второго блока фазовращателей 9 соединен с третьим входом i-го трехвходового сумматора 10. Управляющий вход i-го контура адаптации 6 соединен с i-м выходом устройства ввода управляющих сигналов 5.
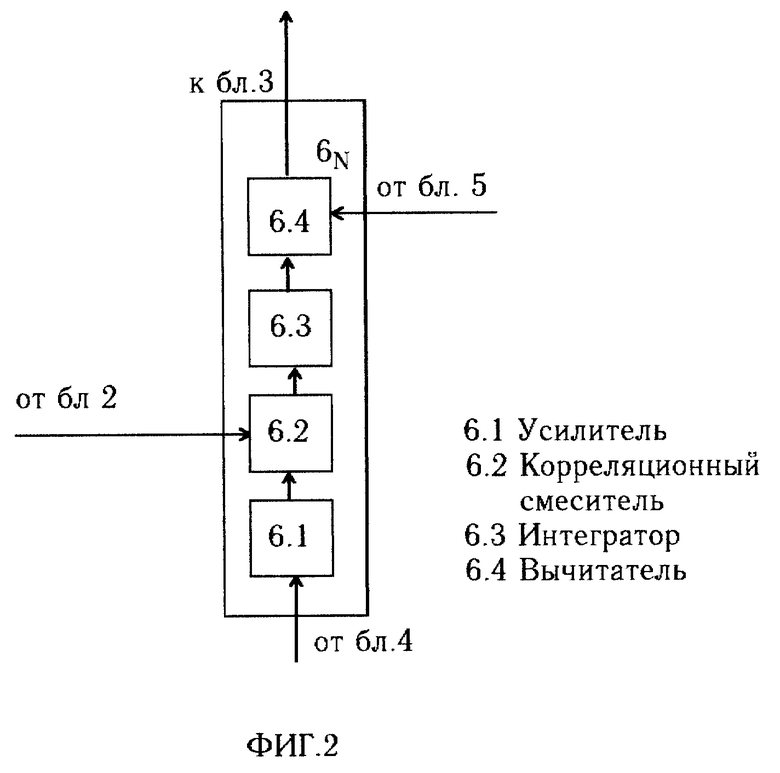
Каждый i-й контур адаптации 6, представленный на фиг. 2, предназначен для выполнения операции итерационного вычисления ВВК в соответствии с выражением (3) и состоит из последовательно соединенных усилителя 6.1, умножителя 6.2, интегратора (интегрирующего RC фильтра) 6.3, вычитателя 6.4. При этом вход усилителя 6.1 является информационным входом контура адаптации 6, а второй вход умножителя 6.2 и второй вход вычитателя 6.4 является соответственно сигнальным и управляющим входом контура адаптации 6. Выход вычитателя 6.4 является выходом контура адаптации 6.
Антенные элементы 1 предназначены для приема электромагнитных волн. В качестве АЭ могут быть использованы типовые антенные устройства, применяемые в антенных решетках, например, несимметричные вибраторы и др.
Каждый i-й блок комплексного сопряжения 2 предназначен для выполнения операции комплексного сопряжения сигналов. Данные блоки могут быть выполнены в виде схем разложения сигнала на синфазную и квадратурную составляющие с включением в квадратурную ветвь дополнительного фазовращателя на π/2. Схема блока комплексного сопряжения описана в патенте РФ N 2099838, опубликованном 20.12.1997 года, Бюл. N 35.
Комплексные весовые умножители 3 предназначены для выполнения операции комплексного взвешивания, то есть изменения амплитуды и фазы сигналов до требуемой величины. Схема КВУ описана в патенте РФ N 2099838, опубликованном 20.12.1997 года, Бюл. 35.
Каждый N входовый сумматор 4 и трехвходовый сумматор 10 предназначены для выполнения операции суммирования сигналов. Данные сумматоры (в зависимости от диапазона частот) могут быть выполнены в виде высокочастотных трансформаторов на коаксиальных или микрополосковых линиях. Схема и принцип работы данных сумматоров описаны в патенте РФ N 2099838, опубликованном 20.12.1997 года, Бюл. N 35. Кроме того, сумматоры 4, 10 могут быть реализованы на мостовых схемах сложения и распределения мощностей высокочастотных колебаний, см., например, книгу В.В.Заенцев, В.М.Катушкина, С.Е.Лондон, под ред. З. И. Модель. Устройства сложения и распределения мощностей высокочастотных колебаний. -М.: Советское радио, 1980 г., стр. 9-17.
Устройство ввода информации 5 предназначено для ввода информации о секторе, в пределах которого ожидается приход полезного сигнала, и представляет собой регулируемый источник напряжения, а при реализации с использованием цифровой элементной базы - оперативное запоминающее устройство (см. И.П. Степаненко, Основы микроэлектроники. М. : Советское радио, 1980 г., стр. 378-385).
Генераторы 71, 72 предназначены для генерирования двух электрических колебаний заданной амплитуды и частоты. В качестве генераторов 71, 72 может быть использован, например, синтезатор частот на основе системы ФАПЧ с переменным делителем частоты, см. книгу "Радиоприемные устройства" под редакцией проф. А.П.Жуковского М.: Высшая школа, 1989 год, стр. 107-109.
Первый блок фазовращателей 8 предназначен для управления фазовыми сдвигами сигналов. Схема данного блока фазовращателей представлена на фиг. 3 и состоит из N фазовращателей 8.1 (8.11, 8.12, ... 8.1N), входы которых соединены вместе и являются входом первого блока фазовращателей, а выход i-го фазовращателя является i-м выходом первого блока фазовращателей. Схема и принцип работы фазовращателей 8.1 известны и они могут быть выполнены на ферритовых элементах, см., например, книгу Д.Н.Воскресенский "Антенны и устройства СВЧ. Проектирование фазированных антенных решеток".- М.: Радио и связь, 1981 г., стр. 57-58, или на операционных усилителях, см., например, книгу В. В. Никитченко "Функциональные узлы адаптивных компенсаторов помех" Часть 1. Ленинград, Военная академия связи, 1990 год, стр. 125-126.
Второй блок фазовращателей 9 по составу, назначению и принципу действия аналогичен первому блоку фазовращателей 8.
Усилитель 6.1 предназначен для усиления сигнала, при этом амплитуда входного сигнала увеличивается в μ раз (μ - коэффициент усиления данного усилителя), а фаза сигнала остается без изменения. В качестве усилителя может быть использован усилительный каскад на биполярном транзисторе, включенный по схеме с общим эмиттером с отрицательной обратной связью (см. Справочник по радиоэлектронным устройствам: в 2-х томах Т.1 /Бурин Л.И., Васильев В.П., Каганов В.И. и др., под редакцией Д.П. Линде. - М.: Энергия. с.33. рис. 1-30), или на аналоговых интегральных микросхемах, например ИМС 235 УР 7, ИМС 171 УВ 1А и др., см., например, книгу В.В.Никитченко "Функциональные узлы адаптивных компенсаторов помех" Часть 1. Л.: Военная академия связи, 1990 год, стр. 57-64.
Корреляционный смеситель 6.2 (умножитель) предназначен для формирования взаимокорреляционной функции входных сигналов. Схема корреляционного смесителя описана в патенте РФ N 2099838, опубликованном 20.12.1997 года, Бюл. N 35.
Интегратор 6.3 предназначен для выполнения операции выделения низкочастотной составляющей, пропорциональной амплитуде и фазе сигнала. В качестве интегратора может использоваться интегрирующий RC фильтр, см. книгу Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. Введение в теорию. - М.: Радио и связь, 1986 г. , стр. 183. Схема интегратора описана в патенте РФ N 2099838, опубликованном 20.12.1997 года, Бюл. N 35.
Вычитатель 6.4 предназначен для выполнения операции вычитания сигналов. Схема вычитателя описана в патенте РФ N 2099838, опубликованном 20.12.1997 года, Бюл. N 35.
Кроме того, блоки, входящие в состав структурной схемы ААР, могут быть реализованы программно, в частности, на цифровом процессоре обработки сигналов, например микросхема TMS320C30 (см. Цифровые процессоры обработки сигналов: Справочник/ А.Г.Остапенко, С.И.Лавлинский, А.Б.Сушков и др.; Под ред. А. Г. Остапенко. - М.: Радио и связь, 1994. - с. 88). Возможность использования цифровых процессоров обработки сигналов для реализации алгоритмов АПФ радиосигналов обоснована в статье Городилина В.В., Глушанкова Е.И. "Управляющий микропроцессорный контроллер для реализации алгоритмов адаптивной обработки радиосигналов в антенной решетке", Радиотехника, N 9, 1984 г. , стр. 72.
Заявленное устройство работает следующим образом.
На вход антенных элементов ААР поступает полезный сигнал s(t) и помехи p(t) от источников, расположенных под углами θc, θп относительно нормали к оси ААР (в общем случае θc≠ θп), и изотропный шум ш(t). Полезный сигнал и помехи поступают на i-й АЭ с разными значениями фаз ϕci≠ ϕпi.
Сумма полезного сигнала, помех и шума (Xi(t)) с выходов i-х АЭ поступают на первые входы соответствующих трехвходовых сумматоров. Одновременно с приемом полезного сигнала, помех и шума в генераторах 71, 72 происходит формирование двух опорных равноамплитудных сигналов F1(t), F2(t) (сигналы (10), (11)) с различными частотами, отличными от частоты принимаемого полезного сигнала. При этом частоты первого и второго опорных сигналов выбирают согласно условию (12). В фазовращателях 81-8N каждую i-ю составляющую, образованную от разделения первого опорного сигнала, сдвигают на предварительно заданную величину фазы Δϕli, а в фазовращателях 91-9N каждую i-ю составляющую, образованную от разделения второго опорного сигнала, сдвигают на предварительно заданную величину фазы Δϕ2i, то есть формируют сигналы (13), (14). Фазовые сдвиги Δϕ1i, Δϕ2i выбирают согласно условий (15), (16). Значения амплитуды A сигналов на выходе первого и второго генератора, а соответственно, и значения амплитуд  i-х составляющих опорных сигналов F1i(t), F2i(t), целесообразно выбирать согласно рекомендациям, представленным в таблице 1 (таблице 2) в зависимости от сигнально-помеховой обстановки (исходя из максимально возможного значения входного отношения сигнал/шум и ошибки в задании направления прихода сигнала). В результате на выходе фазовращателей 81-8N получим N составляющих первого опорного сигнала (13), а на выходе фазовращателей 91-9N получим N составляющих второго опорного сигнала (14), причем i-е составляющие первого и второго опорного сигнала будут совпадать с сигналами Si(θy1),Si(θy2). Особенность этих сигналов состоит в том, что они реально не принимаются АР, а искусственно формируются и вводятся в каналы ААР после АЭ. Далее, i-е составляющие первого и второго опорного сигнала (сигналы (13), (14)) поступают соответственно на второй и третий входы i-го трехвходового сумматора, в котором происходит выполнение операции суммирования i-х составляющих первого и второго опорного сигнала с сигналами, принятыми i-ми антенными элементами. На выходе i-го трехвходового сумматора будет образован сигнал (17). Данные действия с сигналами позволят наряду с реально принятым полезным сигналом, помехами и шумами (Xi(t)) имитировать прием сигналов F1i(t), F2i(t).
i-х составляющих опорных сигналов F1i(t), F2i(t), целесообразно выбирать согласно рекомендациям, представленным в таблице 1 (таблице 2) в зависимости от сигнально-помеховой обстановки (исходя из максимально возможного значения входного отношения сигнал/шум и ошибки в задании направления прихода сигнала). В результате на выходе фазовращателей 81-8N получим N составляющих первого опорного сигнала (13), а на выходе фазовращателей 91-9N получим N составляющих второго опорного сигнала (14), причем i-е составляющие первого и второго опорного сигнала будут совпадать с сигналами Si(θy1),Si(θy2). Особенность этих сигналов состоит в том, что они реально не принимаются АР, а искусственно формируются и вводятся в каналы ААР после АЭ. Далее, i-е составляющие первого и второго опорного сигнала (сигналы (13), (14)) поступают соответственно на второй и третий входы i-го трехвходового сумматора, в котором происходит выполнение операции суммирования i-х составляющих первого и второго опорного сигнала с сигналами, принятыми i-ми антенными элементами. На выходе i-го трехвходового сумматора будет образован сигнал (17). Данные действия с сигналами позволят наряду с реально принятым полезным сигналом, помехами и шумами (Xi(t)) имитировать прием сигналов F1i(t), F2i(t).
Сигналы Zi(t) с выходов i-х трехвходовых сумматоров поступают на первые входы i-х комплексных весовых умножителей и через i-е блоки комплексного сопряжения на сигнальные входы i-х контуров адаптации. В комплексных весовых умножителях происходит умножение сигналов Zi(t) на соответствующие ВК Wi(t), поступающие с выходов i-х контуров адаптации, что обеспечивает изменение амплитуды и фазы сигналов Zi(t). С выходов комплексных весовых умножителей "взвешенные" сигналы поступают на i-е входы N входового общего сумматора, где они суммируются, образуя выходной сигнал ААР
Y(t)=(W1(t)Z1(t) + W2(t)Z2(t) + ... + WN(t)ZN(t)). (25)
Выходной сигнал Y(t) дополнительно поступает на информационные входы контуров адаптации, где осуществляется операция вычисления взаимной корреляции выходного сигнала Y(t) с входным сигналом Zi(t). Расчет ВК Wi(t) постоянно производится в соответствии с выражением (3) в адаптивных контурах с учетом значения коэффициента взаимной корреляции  (здесь "-" обозначает операцию усреднения по времени) и соответствующего управляющего сигнала Vyi, поступающего из устройства ввода управляющих сигналов.
(здесь "-" обозначает операцию усреднения по времени) и соответствующего управляющего сигнала Vyi, поступающего из устройства ввода управляющих сигналов.
Детальное сопоставление возможностей заявляемого способа и устройства, реализующего данный способ АПФ сигналов, и способа и устройства - прототипа АПФ сигналов, было проведено с использованием метода имитационного моделирования, что дополнительно подтверждает возможность их технической реализации.
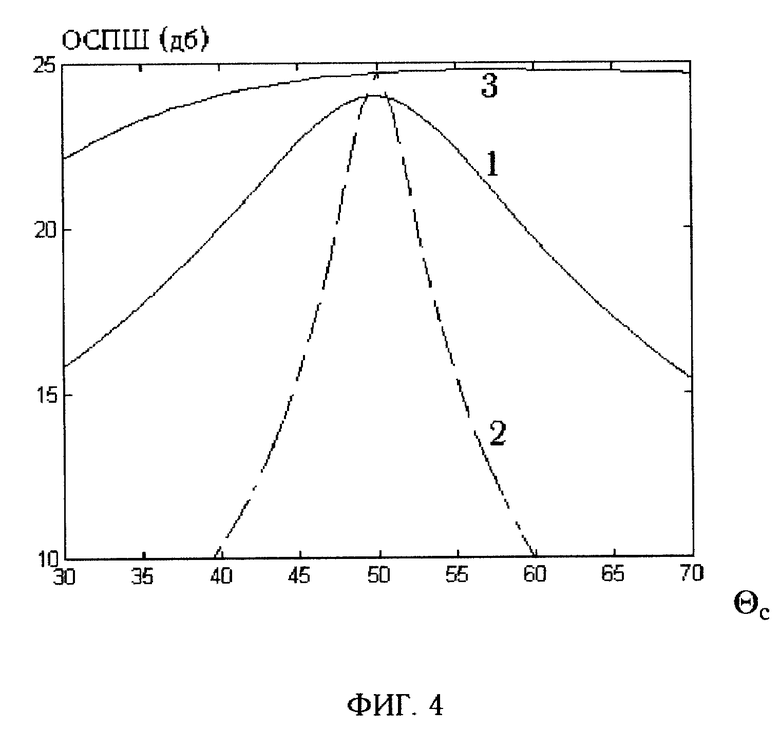
В качестве иллюстрации на фиг. 4 показана полученная путем имитационного моделирования зависимость ОСПШ Pc/(Pп+σ
При моделировании использовались следующие предположения о характеристиках АР и сигнально-помеховой обстановке:
- АР линейная эквидистантная N=3, межэлементное расстояние d = λ/2 (λ - длина волны сигнала), АЭ изотропные и невзаимодействующие;
- несущие частоты сигнала и помех тождественны fc= fп=300 МГц (λ =1 м);
- угол прихода помехи (относительно нормали к линии расположения АЭ) θп = 10o;
- входное отношение сигнал/шум 10lg (Pc/σ
- входное отношение помеха/шум 10lg (Pп/σ
Предполагалось также, что характеристики АР известны точно, а направление прихода сигнала известно с точностью до углового сектора θy1 = 35o, θy2 = 65o.
При проведении имитационного моделирования частота, амплитуда и фаза i-х составляющих первого и второго опорного колебания выбиралась исходя из приведенных ранее рекомендаций.
1. Частоты первого и второго опорного сигнала F1(t), F2(t) выбирались согласно условию 12 и составили соответственно f1 = 290 МГц ( (λ = 1.034 м) и f2 = 310 МГц ( (λ = 0.967 м).
2. Амплитуда A сигнала на выходе первого и второго опорного генератора рассчитывалась согласно рекомендациям, представленным в таблице 1, соответственно из условий ( (Pc/σ
3. Фазовые сдвиги i-х составляющих первого и второго опорного колебания ϕ1i,ϕ2i рассчитывались согласно выражению (8) как и составили ϕ11= ϕ21 = 0o, ϕ12 = 99,85o, ϕ13 = 199,7o, ϕ22 = 168,66o, ϕ23 = 337,31o.
и составили ϕ11= ϕ21 = 0o, ϕ12 = 99,85o, ϕ13 = 199,7o, ϕ22 = 168,66o, ϕ23 = 337,31o.
Предполагаемое направление прихода полезного сигнала θy выбрано в середине известного углового сектора θy1 = 35o, θy2 = 65o, θy = 50o.
Кривые, обозначенные на фиг. 4 цифрами 1, 2, получены соответственно для случаев: 1 - заявляемой ААР, 2 - ААР-прототипа. Для сравнения на этом же чертеже представлена кривая, характеризующая потенциально достижимое для данной сигнально-помеховой ситуации значение ОСПШ (кривая 3).
Из графиков видно, что в пределах заданного углового сектора прихода полезного сигнала эффективность ААР, реализующей предлагаемый способ АПФ, значительно выше, чем у ААР прототипа.
Данное преимущество заявляемой ААР будет способствовать повышению помехозащищенности линий (систем) радиосвязи, характеризуемых отсутствием точной априорной информации о направлении прихода полезного сигнала, в частности, систем связи с подвижными объектами и, в конечном счете, будет способствовать внедрению ААР в данные системы.
Таким образом, предлагаемое устройство полностью реализует заявляемый способ АПФ сигналов.
Литература
1. Марчук Л.А., Гиниятуллин Н.Ф., Колинько А.В. Анализ алгоритмов минимизации мощности выходного сигнала в ААР. // Радиотехника и электроника, 1998 г., N 1.
2. Марчук Л.А., Колинько А.В. Минимизация отношения сигнала к мешающим воздействиям в задачах адаптивной пространственной фильтрации. // Радиотехника, 1998 г., N 1, стр. 48-54.
3. Черемисин О.П., Ратынский М.В. и др. Эффективный проекционный алгоритм адаптивной пространственной фильтрации. // Радиотехника и электроника, 1994 г., том 39, выпуск 2, стр. 259-263.
4. Марчук Л.А. Робастные алгоритмы АПФ сигналов с неточно известными параметрами. // Радиотехника ,1997 г., N 11, стр. 3-7.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА | 1995 |
|
RU2099837C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1994 |
|
RU2090960C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1995 |
|
RU2099838C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1991 |
|
RU2014678C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УСЛОВИЯХ МНОГОЛУЧЕВОСТИ | 1997 |
|
RU2141675C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1991 |
|
RU2014680C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1991 |
|
RU2014681C1 |
| АНТЕННАЯ СИСТЕМА С УПРАВЛЯЕМОЙ ДИАГРАММОЙ НАПРАВЛЕННОСТИ (ВАРИАНТЫ) | 1997 |
|
RU2130674C1 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 1994 |
|
RU2107394C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОМЕХ | 1994 |
|
RU2097921C1 |


Способ адаптивной пространственной фильтрации сигналов (АПФ), реализуемый в адаптивных антенных решетках, заключается в приеме сигналов в N пространственно разнесенных точках, где N≥2, расчете весовых коэффициентов, генерировании первого и второго опорных сигналов, частоты которых выбраны соответственно из условий ω1<(ω0-Δω) и ω2>(ω0+Δω), где ω0 и Δω - несущая частота и ширина спектра принимаемого полезного сигнала, разделении каждого из них на N равноамплитудных составляющих, сдвиге каждой i-й составляющей, где i=1,2, ...N, на предварительно заданную величину фазы, суммировании i-x принятых сигналов и i-x составляющих первого и второго опорных сигналов и взвешенном суммировании образованных сигналов. Более высокая помехозащищенность приема сигналов достигается вследствие формирования главного лепестка диаграммы направленности, перекрывающего угловой сектор, в пределах которого ожидается приход полезного сигнала. 2 с.п. ф-лы, 4 ил., 2 табл.
Wi(t+Δt) = Wi(t)-μ[Vyi-Y(t)Z
где Wi(t) - текущее значение i-го весового коэффициента;
Vyi - значение i-го управляющего сигнала;
Δt - интервал временной дискретизации;
Y(t) - взвешенно суммированный сигнал;
Zi(t) - суммарный сигнал от сложения i-го принятого сигнала и i-х составляющих первого и второго опорных сигналов;
* - обозначение операции комплексного сопряжения;
μ - коэффициент усиления (передачи), а частоты первого ω1 и второго ω2 опорных сигналов выбирают из условия ω1 < (ω0-Δω), ω2 > (ω0+Δω), где ω0 и Δω соответственно несущая частота и ширина спектра принимаемого полезного сигнала.
| US 4713668 A, 15.12.87 | |||
| RU 94026555 A1, 10.09.96 | |||
| RU 94026556 A1, 10.09.96 | |||
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1994 |
|
RU2090960C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1993 |
|
RU2092942C1 |
