Изобретение относится к области радиотехники и связи, а именно к адаптивным антенным решеткам и, в частности, может быть использовано на подвижных объектах (ПО) при необходимости достижения более высокого уровня помехозащищенности приема сигналов.
Известны адаптивные антенные решетки (ААР), которые могут быть использованы на подвижных объектах [1]
Данное устройство включает в себя антенные элементы (АЭ), соединенные через весовые умножители (ВУ) с входами общего сумматора, и адаптивный контур, причем входы адаптивного контура соединены с выходами АЭ и выходом общего сумматора, а выходы с управляющими входами весовых умножителей.
Такие ААР применяются при отсутствии априорной информации о направлении прихода сигнала и их функционирование основано на минимизации мощности суммарного выходного сигнала (ММВ).
Недостатками рассмотренного аналога являются: относительно невысокая помехозащищенность приема в случаях, когда мощность сигнала (Pс) и помехи (Pп) на входе ААР соизмеримы между собой; непреднамеренное подавление полезного сигнала в случае, когда Pс>Pп.
Наиболее близким по своей технической сущности к заявленной адаптивной антенной системе, является устройство обработки сигналов, описанное в работе [2]
Прототип включает в себя N АЭ, соединенных через ПФ с входами весовых умножителей (ВУ), которые вместе с сумматорами входят в состав блока формирования выходных сигналов, причем выходы ПФ также связаны с входами блока формирования корреляционной матрицы, управляющие выходы которого соединены с входами блока вычисления собственных векторов, причем выходы сумматоров в блоке формирования выходных сигналов являются выходами устройства, а входы блока формирования собственных векторов соединены с выходами блока формирования корреляционной матрицы.
Принцип действия данного устройства основан на разделении сигналов и помех, т.е. формирование на j-м выходе (j 1.L) характеристики направленности (ХН) с нуля в направлениях прихода всех сигналов (помех) за исключением j-го.
В данном устройстве частично устраняется недостаток рассматриваемого аналога. Это объясняется тем, что осуществлен переход к ААС с несколькими выходами. В данную ААС введены блок формирования собственных векторов (СВ), блок формирования выходных сигналов и блок формирования корреляционной матрицы, которые позволяют получать на выходах устройства все обрабатываемые сигналы, независимо от их мощностей. В аналоге сигнал (помеха) с большей мощностью давиться "нулем" ХН.
Недостатками прототипа являются:
все же низкая помехозащищенность в практически важном для ПО случае N 2, при невыполнении условий Pс > Pп или Pп > Pс. Действительно, для N 2 корреляционную матрицу (КМ) Rxx входных сигналов (помех) можно представить в виде:
где σ матрицы (1) и соответствующие собственные вектора WТ(λmax), WТ(λmin) получим:
матрицы (1) и соответствующие собственные вектора WТ(λmax), WТ(λmin) получим: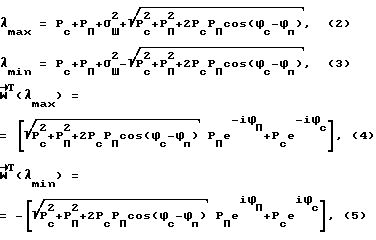
Положим Pс Pп 1; θc 0o θП 30o используя (4), (5) вычислим отношения/(помеха+шум) η (•) на выходе ААС: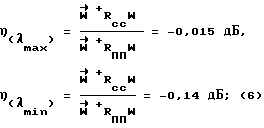
где "+" обозначение операции эрмитового сопряжения; "т" операция сопряжения.
Из (6) видно, что в случае Pс≈Pп мощности сигнала и помехи на каждом выходе также соизмеримы.
В ААР эффективное разделение возможно только при локально стационарной сигнально-помеховой, так как в качестве векторов весовых коэффициентов используются СВ, которые рассчитываются без использования информации о выходных сигналах. В случае же систем связи с ПО сигнально-помеховая обстановка, как правило, существенно нестационарна.
Целью изобретения является разработка адаптивной антенной системы (ААС), позволяющей повысить помехозащищенность приема сигналов в линиях связи с ПО, при использовании двухэлементной АР независимо от мощностей входных сигналов.
Поставленная цель достигается тем, что в известной адаптивной антенной системе, содержащей первый и второй антенные элементы, первый и второй полосовые фильтры, первый, второй, третий и четвертый весовые умножители и сумматор, в которой выходы первого и второго антенных элементов подключены к входам соответствующих полосовых фильтров, выходы которых соединены с первыми входами соответствующих третьего и четвертого весовых умножителей, а выходы первого и второго весовых умножителей подключены к соответствующим входам сумматора, выход которого является выходом антенной системы, дополнительно введены два адаптивных компенсатора (АКП), вычитатель и блок управления (БУ). Выход первого полосового фильтра (ПФ) подключен к первым входам первого АКП и БУ, а выход второго ПФ дополнительно подключен к первым входам второго АКП и к второму входу БУ. Выходы третьего и четвертого ВУ подключены, соответственно, к первому и второму входам вычитателя, причем выход последнего соединен одновременно с третьими входами БУ, первого и второго АКП и является вторым выходом ААС. Первый, второй, третий, четвертый, пятый и шестой выходы БУ соединены с вторыми входами первого, второго, третьего и четвертого весовых умножителей и первого и второго адаптивных компенсаторов, причем выход первого АКП подключен одновременно к четвертому входу БУ и первому входу первого ВУ, а выход второго АКП подключен, соответственно, к пятому входу БУ и первому входу второго ВУ. Выход сумматора дополнительно подключен к шестому входу БУ.
Блок управления состоит из буферного каскада (БК), постоянного запоминающего устройства (ПЗУ), процессора и многоканального аналого-цифрового преобразователя (АЦП). Первый, второй, третий, четвертый, пятый и шестой входы АЦП являются соответствующими входами БУ. Первый, второй, третий, четвертый, пятый и шестой выходы БК являются соответствующими выходами БУ. Процессор с помощью первых, вторых и третьих адресных шин и магистралей данных соединен, соответственно, с аналого-цифровым преобразователем, буферным каскадом и постоянным запоминающим устройством.
Перечисленная совокупность существенных признаков, а именно дополнительное введение двух АКП, вычитателя и БУ позволяет получить на выходах ААС соотношения сигнал/(помеха+шум), которые по-разному зависят от пространственного положения сигналов (помех), что, в конечном счете, дает возможность разделить сигналы и, таким образом, достигнуть более высокой помехозащищенности приема сигналов при использовании двухэлементной ААС.
Заявленное устройство поясняется чертежами, на которых показаны:
на фиг.1 структурная схема ААС;
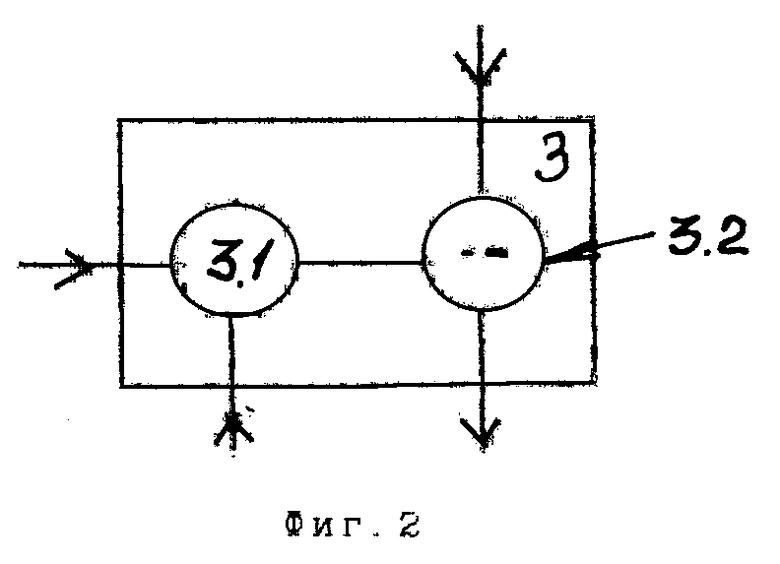
на фиг.2 вариант структурной схемы АКП;
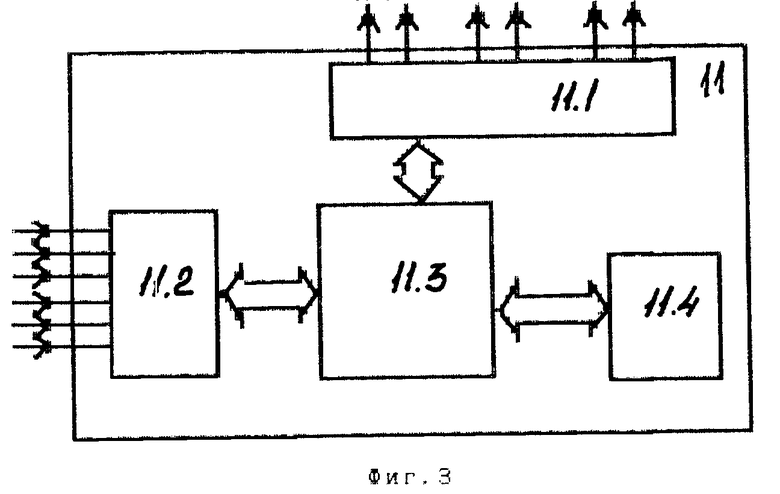
на фиг.3 вариант структурной схемы БУ;
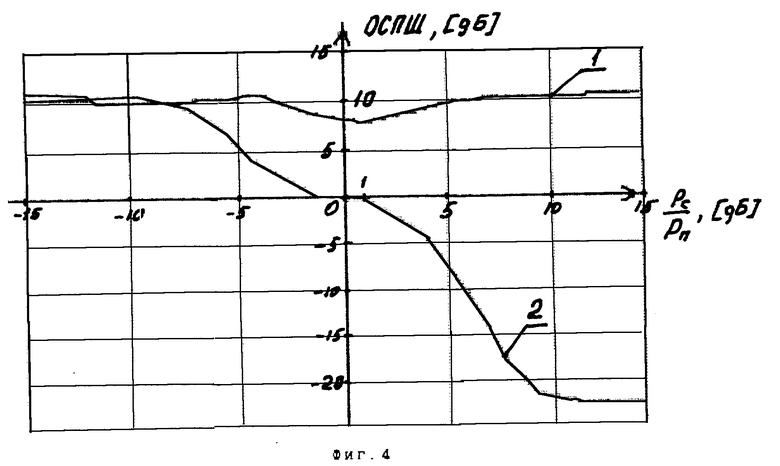
на фиг.4 результаты анализа эффективности заявленного устройства
ААС, показанная на фиг.1, состоит из двух АЭ 1, двух ПФ 2, первого 3 и второго 4 АКП, первого 5, второго 6, третьего 7 и четвертого 8 ВУ, сумматора 9, вычитателя 10, БУ 11.
Выход первого ПФ 2 подключен одновременно к первым входам первого АКП 3, третьего ВУ 7 и БУ 11, а выход второго ПФ 2 соединен, соответственно, с первыми входами второго АКП 4, четвертого ВУ 8 и вторым входами БУ 11. Выходы третьего 7 и четвертого 8 ВУ подключены, соответственно, к первому и второму входам вычитателя 10, причем выход последнего соединен одновременно с третьими выходами БУ 11, первого 3 и второго 4 АКП и является вторым выходом ААС. Выходы БУ 11 соединены, соответственно, с вторыми входами весовых умножителей и адаптивных компенсаторов, причем выход первого 3 АКП подключен одновременно к четвертому входу БУ 11 и первому входу первого 5 ВУ, а выход второго АКП 4 подключен, соответственно, к пятому входу БУ 11 и первому входу второго 6 ВУ. Выходы первого 5 и второго 6 ВУ соединены с первым и вторым входами сумматора 9, выход которого подключен к шестому входу БУ 11 и одновременно является первым выходом ААС.
Блок управления состоит из буферного каскада 11.1, многоканального АЦП 11.2, ПЗУ 11.4. процессора 11.3. Первый, второй, шестой, третий, четвертый и пятый входы АЦП 11.2 являются входами БУ 11 и подключены, соответственно, к выходам первого, второго ПФ 2, первому и второму выходам ААС и выходам АКП 3 и 4. Первый, второй, третий, четвертый, пятый и шестой выходы БК 11.1 являются соответствующими выходами БУ 11, причем процессор 11.3 с помощью первых, вторых и третьих адресных шин и магистралей данных соединен, соответственно, с АЦП 11.2 преобразователем, БК 11.1 и ПЗУ 11.4.
Блок управления 11 может быть реализован как программно (на базе универсальной специализированной микропроцессорной комплексной БИС), так и аппаратурно. Вариант аппаратурной реализации БУ показан на фиг.3. Все элементы выполнены на базе интегральных микросхем (например, буферный каскад - КР589АП16; процессор микропроцессор К580ИК80, К1804 и др. которые позволяют программировать все необходимые функции, имеют достаточный объем памяти и производят нужные расчеты; АЦП на базе Б572ПП-1-4, К572ПВ4 и др. ПЗУ может выполняться на типовых импортных и отечественных микросхемах 27512, 27064а, К573РФ5 и т.д. "Микросхемы и их применение" В.Н.Виниаминов О.Н.Лебедев 1989 г. с. 157, 179, 188 или др. литературу по интегральным микросхемам, "Микропроцессоры" М.А.Бедрековский В.В.Волга 1981г. М: Радио и связь, с.33).
Адаптивный компенсатор может быть выполнен по известной схеме фиг.2 (см. Р. А. Монзинго, Т.У.Миллер "Адаптивные антенные решетки. Введение в теорию". 1986 г. с.177).
Антенные элементы представляют собой типовые антенные устройства, используемые в АР.
Полосовой фильтр может быть реализован по известной схеме, например, представлять собой последовательное соединение емкости и индуктивности.
Весовое умножители, сумматор, вычитатель могут быть реализованы по известной схеме (см. Р. А. Монзинго, Т.У.Миллер "Адаптивные антенные решетки. Введение в теорию", 1986 г. с.56).
Заявленное устройство работает следующим образом. В начальный момент времени на выходе двухэлементной ААС присутствуют сигнал Pс и помеха Pп (тождественны между собой по частоте и форме спектра). Все ВУ и АКП соответствуют единичным коэффициентам (т. е. не работают). Следовательно, на входе первого АЭ присутствует смесь сигнала Pс1 и помехи Pп1, а на выходе второго АЭ присутствует смесь сигнала Pс2 и помехи Pп2, которые отличаются набегом фаз из-за разности хода между АЭ. Запишем суммарные значения этих сигналов (помех) на входах АЭ как x1 и x2. Сигналы x1, x2 без дополнительных воздействий проходят с выходов АЭ через ПФ, АКП, первый и второй ВУ на первый и второй входы сумматора, а также через третий и четвертый ВУ на первый и второй входы вычитателя, где, в первом случае, выполняется сложение сигналов, а, во втором, их вычитание.
Таким образом, достигается начальный "перекос" мощностей сигналов на выходах ААС (т.е. выходы системы по-разному зависят от угловых соотношений входных сигналов). Под "перекосом" следует понимать различие мощностей сигнала Pс1 и помехи Pп1 на суммарном выходе и сигнала Pс2 и помехи Pп2 на разностном выходе ААС.
Для дальнейшего увеличения "перекоса" в ветвях разделителя поочередно включаются в работу сначала и вторые АКП и ВУ, а потом третий и четвертый ВУ. При этом на третьи входы первого и второго АКП поступает разностный сигнал с второго выхода ААС. ААС независимо от мощности входных сигналов выравнивают суммарный и разностный сигналы по мощности, благодаря работе АКП, т. о. увеличивая "перекос" мощностей по первому и второму выходам. Так, например, наличие сигнала большой мощности, который приходит под углом к нормали ААС, обозначит присутствие его на обоих выходах ААС. Следовательно, будет проходить процесс вычитания сигнала самого из себя (см. работу АКП) до момента соизмеримости мощностей помехи и сигнала по обоим выходам ААС. Алгоритмы управления АКП описаны ниже.
Одновременно с такой "балансировкой" включаются первый и второй ВУ, которые, как только мощность сигнала Pc1 превышает мощность помехи Pп1 или наоборот, начинают максимизировать выходную мощность доминирующего сигнала (помехи). Действительно, максимальная мощность на выходе ААС (при наличии двух соизмеримых некоррелированных сигнала и помехи) может быть достигнута, когда один из сигналов вычитается из общей смеси x1. В свою очередь, суммарный сигнал (где, например, мощность сигнала Pс1 превышает мощности помехи Pп1) с первого выхода ААС поступает на вторые входы третьего и четвертого ВУ и еще больше уменьшает наличие сигнала Pс2 и меньше помехи Pп2 во второй ветви. Алгоритм работы третьего и четвертого ВУ максимизирует выход вычитателя, т.о. увеличивая долю присутствия помехи Pп2 на втором выходе. Описанные ниже алгоритмы работы ААС позволяют получить наилучшее разделение и, соответственно, повысить помехозащищенность.
Рассмотрим алгоритмы функционирования ААС.
Положим, что в начальный момент времени на разностном выходе выполняются условия: Pс2>Pп2, (Pс2/Pп2 β).
Формально, всю процедуру работы ААС можно представить в виде трех взаимосвязанных алгоритмов, которые выполняет процессор в установленной последовательности. Процессор управляет весовыми коэффициентами Z1, Z2 первого 3 и второго 4 АКП, весовыми коэффициентами W1, W2 первого 5, второго 6 и V1, V2 третьего 7, четвертого 8 ВУ. Сигналы x1, x2 на выходах АКП запишем как x11, x22, а сигналы на суммарном и разностном выходах ААС обозначим, соответственно, как y1, y2. Сигналы x11, x22 и y2 системы поступают на первые три входа многоканального АЦП, где по средствам мультиплексора входы АЦП последовательно подключаются на вход процессора в цифровом виде. В процессоре программно формируются управляющие напряжения для АКП в дискретном виде по алгоритму градиентного типа:
где μ шаговая постоянная, определяющая скорость сходимости, "*" - знак комплексного сопряжения.
Одновременно, по четвертому каналу АЦП происходит аналогичная оценка входного напряжения y1 процессором, который формирует выходные напряжения для первого и второго ВУ по второму алгоритму, .
.
(где 
 обозначение нормы) который максимизирует суммарный выходной сигнал y1. Сформированные дискретные значения через буферный каскад (БК) поступают, соответственно, на вторые входы АКП и первого и второго ВУ.
обозначение нормы) который максимизирует суммарный выходной сигнал y1. Сформированные дискретные значения через буферный каскад (БК) поступают, соответственно, на вторые входы АКП и первого и второго ВУ.
Таким образом, после завершения работы АКП, первого и второго ВУ, на суммарном выходе, будет выполняться условие Pп1>Pс1, (Pп1/Pс1 α ). Далее происходит определение весовых коэффициентов V1, V2 аналогично варианту описанному выше для первых двух ВУ, но уже по третьему алгоритму
где  . Отличие заключается только в векторе входных сигналов.
. Отличие заключается только в векторе входных сигналов.
Очевидно, что поскольку на суммарном выходе выполняется условие Pп1>Pс1, (Pп1/Pс1 α), то второй выходной сигнал y2 будут больше зависеть от помехи, чем от сигнала, что обусловит "выравнивание" амплитуды фаз помехи на входе вычитателя. Указанное "выравнивание" приведет к еще большему подавлению помехи на разностном выходе, т.е. к выполнению условия Pс2/Pп2 b, b > α и т. д. Таким образом, процедура перехода от первого и второго к третьему алгоритму происходит (по результатам моделирования) на определенном k шаге, а обратно по условию b > α, программно. Число таких переходов может достичь 12 20 раз.
Продолжая указанные рассуждения придем к осуществлению полного разделения, т.е. на разностном выходе будет присутствовать только сигнал (помеха подавляется до уровня шума), а на суммарном только помеха. Заметим, что, если первоначально на разностном выходе выполняются условия Pп2>Pс2, то после отработки схемы на разностном выходе окажется помеха, а на суммарном сигнал.
Для оценки качества функционирования заявленного устройства на фиг.4 показана зависимость выходного ОСПШ от входного отношения сигнал/помеха для сигнального выхода АПР (кривая 1) и прототипа (кривая 2).
Угол прихода сигнала положим фиксированным и равным qc 0o, а помехи θП 20o и используем следующие предложения о структуре АР и сигнально-помеховой обстановке:
сигнал и помеха являются узкополосными в пространственно-временном смысле и их несущие частоты тождественны;
АР состоит из изотропных и невзаимодействующих АЭ, разнесенных в пространстве на 
Из анализа графиков видно, что АПР обеспечивает высокое качество разделения при всех рассматриваемых сигнально-помеховых ситуациях. Важным моментом является то, что разделение в АПР, практически, инвариантно к значению входного отношения (сигнал/помеха), а прототип работает лишь для случая Pп>Pс.
Таким образом, с введением дополнительных АКП, вычитателя и блока управления, устройство работает при различных мощностях на входе, а также может отслеживать текущие изменения сигнально-помеховой обстановки, благодаря наличию обратной связи, и тем самым может получить выигрыш в соотношении сигнал/помеха более 15 дБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ ФИЛЬТРАЦИИ СИГНАЛОВ | 1998 |
|
RU2141706C1 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 1994 |
|
RU2107394C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1995 |
|
RU2099838C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОМЕХ | 1994 |
|
RU2097921C1 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 1994 |
|
RU2066925C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1994 |
|
RU2090960C1 |
| ЦИФРОВОЙ РАДИОПЕЛЕНГАТОР | 1997 |
|
RU2115135C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1991 |
|
RU2014680C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УСЛОВИЯХ МНОГОЛУЧЕВОСТИ | 1997 |
|
RU2141675C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1991 |
|
RU2014681C1 |
Изобретение относится к радиотехнике и связи, а именно к адаптивным антенным решеткам и, в частности, может быть использовано на подвижных объектах. Целью изобретения является разработка адаптивной антенной системы (ААС), позволяющей повысить помехозащищенность приема сигналов в линиях связи с ПО, при использовании двухэлементной АР независимо от мощностей входных сигналов. Адаптивная антенная система состоит из двух антенных элементов 1, двух полосовых фильтров 2, первого 3 и второго 4 адаптивных компенсаторов, первого 5, второго 6, третьего 7 и четвертого 8 весовых умножителей, сумматора 9, вычитателя 10, блока управления 11. Сигналы с выходов сумматора 9 и вычитателя 10 поступают соответственно на выходы устройства, а далее - на вход приемника через коммутирующее устройство. Дополнительное введение двух адаптивных компенсаторов, вычитателя и блока управления позволяет получить на выходах ААС соотношения сигнал/(помеха+шум), которые по-разному зависят от пространственного положения сигналов (помех), что, в конечном счете, дает возможность разделить сигналы и таким образом достигнуть боле высокой помехозащищенности приема сигналов при использовании двухэлементной ААС. 1 з.п. ф-лы, 4 ил.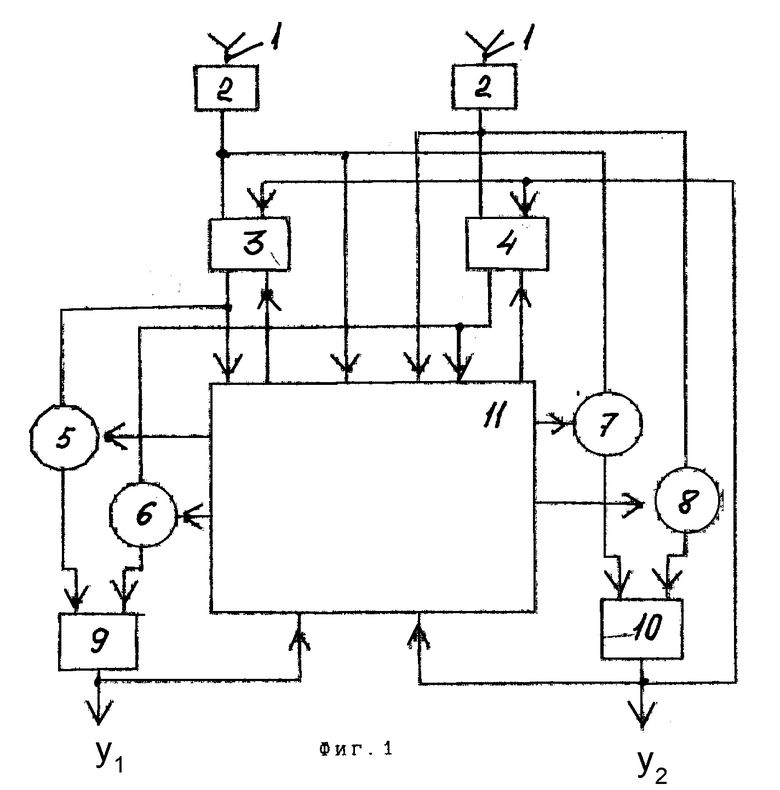
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1548820, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Charless M | |||
| Hackett JR | |||
| Adaptive arrays can be used to separate communication signal | |||
| IEEE Transaction on Aerospace and Electronik System, N 2, 1981, p.234-246. | |||
