Техническое решение относится к машиностроению и касается пневматических перемещающих устройств следящего действия, используемых для управления сцеплением трансмиссии транспортных средств.
Для облегчения управления сцепления в их приводе используют пневматические двигатели, содержащие корпус, полость внутри которого разделена поршнем или диафрагмой на камеры, одна из которых, называемая камерой или полостью регулируемого давления, сообщается через электромагнитный клапан с источником повышенного или пониженного давления воздуха (см. например, патенты в США NN 2514002, 2628696, 2631702, 2634838, 4134482, патент в ФРГ N 2637636).
В качестве прототипа выбрано пневматическое перемещающее устройство следящего действия с электрическим управлением, содержащее корпус, силовой элемент с приводным штоком, разделяющий пространство внутри корпуса на камеры, клапанный механизм, имеющий подвижное и неподвижное седла и подпружиненный запорный элемент, электромагнит, с якорем которого соединено подвижное седло упомянутого клапанного механизма, упругий элемент, расположенный между силовым элементом и якорем электромагнита (см. выданное в СССР авторское свидетельство N 1131688, МПК B 60 K 41/02, 1983 г.).
В этом перемещающем устройстве якорь электромагнита и седла клапанного механизма размещены по одну сторону от запорного элемента, а полость, расположенная между седлами клапанного механизма, соединена с камерой, в которой установлен электромагнит.
Для перемещения штока при необходимости выключить сцепление понижают давление воздуха в камере, в которой расположен электромагнит, сообщая ее при помощи клапанного механизма с источником разрежения воздуха. Однако для обеспечения быстрого опорожнения камеры в составе пневматического устройства требуется дополнительное использовать специальный ресивер, в котором предварительно создается вакуум. Это достигается в результате соединения ресивера с впускным коллектором двигателя внутреннего сгорания.
Решаемая задача - создание быстродействующего пневматического перемещающего устройства следящего действия с электрическим управлением, имеющего простую и надежную конструкцию.
Для решения указанной задачи в пневматическом перемещающем устройстве следящего действия с электрическим управлением, содержащим корпус, силовой элемент с приводным штоком, разделяющий пространство внутри корпуса на камеры, клапанный механизм, имеющий подвижное и неподвижное седла и подпружиненный запорный элемент, электромагнит, с якорем которого соединено подвижное седло упомянутого клапанного механизма, упругий элемент, расположенный между силовым элементом и якорем электромагнита, якорь электромагнита и оба седла клапанного механизма размещены по разные стороны упомянутого запорного элемента, а полость, расположенная между седлами клапанного механизма, соединена с камерой, в которой установлен приводной шток.
При таком выполнении пневматического перемещающего устройства следящего действия передвижение штока для совершения работы производится в результате создания более высокого давления воздуха в той камере, где находится шток. Причем указанное действие совершается при использовании для создания разности давления воздуха как источника повышенного давления, то есть компрессора, так и источника пониженного давления, то есть вакуума. Поскольку рабочий ход штока, обеспечивающий выключение сцепления, происходит в результате впуска воздуха в камеру, а не вследствие его выпуска, то перемещение штока совершается достаточно быстро. В результате обеспечивается быстрое выключение сцепления и более медленное, и, следовательно, плавное его включение. При этом приведение устройства в действие и регулирование темпа перемещения штока осуществляется с помощью всего лишь одного клапанного механизма.
На фигуре 1 изображено пневматическое перемещающее устройство следящего действия с электрическим управлением, для приведения в действие которого используется источник пониженного давления, то есть вакуум.
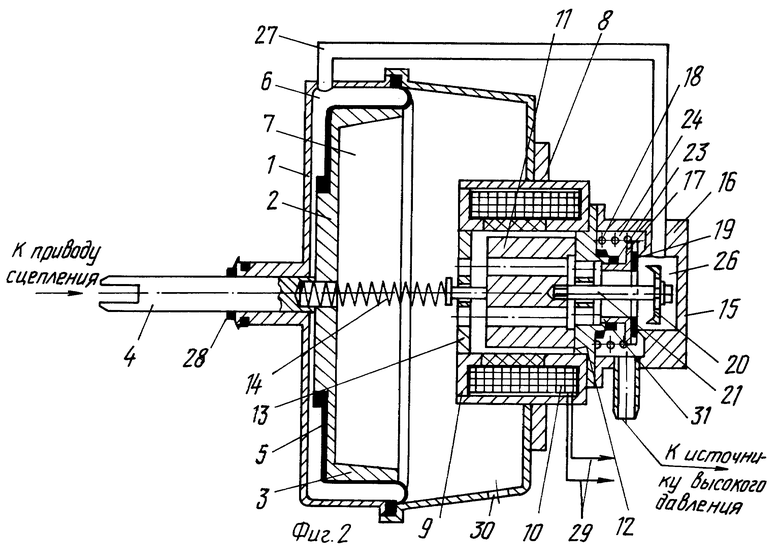
На фигуре 2 представлено аналогичное устройство, для приведения в действие которого используется источник повышенного давления.
Изображенное на фигуре 1 пневматическое перемещающее устройство содержит корпус 1, в котором расположен силовой элемент 2, состоящий из опорной детали 3, соединенной с приводным штоком 4, имеющим связь с исполнительным звеном, в частности, с механизмом привода сцепления трансмиссии транспортного средства (не показан), и диафрагмы 5, установленной на опорной детали 3. Упомянутые опорная деталь и диафрагма разделяют пространство внутри корпуса 1 на камеры 6 и 7.
Если в качестве опорной детали силового элемента используется поршень с кольцевыми уплотнителями, то необходимость в применении диафрагмы отпадает.
Камера 6, в которой располагается приводной шток 4, является камерой регулируемого давления, а в камере 7, где располагается электромагнит 8, давление в процессе работы не изменяется, т.е. данная камера является камерой постоянного давления.
Внутри корпуса 9 электромагнита 8 располагается его обмотка возбуждения 10 и якорь 11, находящийся в пространстве между торцевыми стенками 12 и 13 электромагнита. Между якорем 11 и силовым элементом 2 в штоке 4 расположен упругий элемент 14, представляющий собой пружину сжатия.
Электромагнит 8 предназначен для управления клапанным механизмом 15, корпус 16 которого соединен с корпусом 9 электромагнита.
В состав клапанного механизма 15 входят кольцеобразный запорный элемент 17, взаимодействующий с пружиной 18 сжатия, которая упирается в стенку 12 корпуса электромагнита, неподвижное седло 19, являющееся частью корпуса 16 клапанного механизма 15, и подвижное седло 20, установленное на стержне 21, соединенное с якорем 11 электромагнита 8.
При таком выполнении клапанного механизма его подвижное седло 20 и неподвижное седло 19 оказываются расположенными по отношению к запорному элементу 17 с одной его стороны, а якорь 11 электромагнита - с другой стороны.
Камера 7 корпуса 1 через патрубок 22 постоянно сообщается с источником низкого давления (разрежением), каковым может быть впускной коллектор двигателя внутреннего сгорания (не показан).
Между стенкой 12 электромагнита и запорным элементом 17 установлен уплотнитель 23 с целью изоляции камеры 7 от атмосферы.
Полость 24, расположенная снаружи запорного элемента 17, постоянно соединена через отверстие 25 с атмосферой.
Полость 26 между седлами 19 и 20 через трубопровод 27 сообщена с камерой 6.
На корпусе 1 и штоке 4 закреплен эластичный уплотнительный элемент 28 с целью изоляции камеры 6 от атмосферы. Выводные концы 29 обмотки 10 подключаются к источнику регулируемого напряжения (не показан).
Устройство согласно фигуре 1 действует следующим образом.
На силовой элемент 2 справа налево действует усилие Fсц, передающееся на шток 4 от нажимных пружин сцепления (не показаны). В этом же направлении на силовой элемент действует усилие Fос, возникающее в результате сжатия пружины 14, а в противоположном направлении на силовой элемент воздействует усилие FΔ создающееся в результате разности давления воздуха с обеих сторон опорного элемента 3.
В результате действия этих усилий силовой элемент устанавливается в положение, которому соответствует равенство сил Fсц + Fос = FΔ. При этом, чем больше величина FΔ, тем дальше внутрь корпуса 1 перемещается силовой элемент 2, воздействующий на привод сцепления. В результате соответственно уменьшается момент, передаваемый сцеплением, вплоть до полного его выключения при крайнем положении силового элемента. Усилие FΔ зависит от величины давления воздуха, создающегося в камере 6, которое регулируется в результате действия клапанного механизма 15. В свою очередь, клапанный механизм управляется электромагнитом 8, якорь 11 которого воздействует на подвижное седло 20. Если якорь 11 электромагнита находится в крайнем правом положении (как это изображено на фигуре 1), то подвижное седло 20 отходит от запорного элемента 17, и данный элемент под воздействием пружины 23 передвигается вправо, то есть он прижимается к неподвижному седлу 19. Вследствие этого камера 26 клапанного механизма 15, постоянно сообщающаяся через трубопровод 27 с камерой 6, во-первых, теряет связь с атмосферой и, во-вторых, через отверстия в стенках 12, 13 и якоре 11 электромагнита сообщается с камерой 7. В результате обеспечивается сообщение между собой камер 6 и 7 с установлением в них одинаковых величин давления воздуха (разрежения).
Данному положению клапанного механизма соответствует условие FΔ = 0, поэтому силовой элемент 2 под действием пружин сцепления перемещается в крайнее левое положение, чему соответствует полное включение сцепления.
Когда якорь 11 электромагнит перемещается в крайнее левое положение, то подвижное седло 20 нажимает на запорный элемент 17 и отводит его от неподвижного седла 19. Вследствие этого, во-первых, прерывается связь между камерами 7 и 26 и, во-вторых, через отверстие 25 в корпусе 16 клапанного механизма 15 обеспечивается сообщение камер 26 и 6 с атмосферой.
При таком положении клапанного механизма имеет место наибольшая разница в величинах давления воздуха в камерах 6 и 7, чему соответствует максимальное значение усилия FΔ . Под действием этого усилия силовой элемент 2 перемещается в крайнее правое положение, чему соответствует полное выключение сцепления.
Наряду с рассмотренными режимами работы перемещающего устройства, которые соответствуют двум крайним положениям якоря 11, при определенном его среднем положении подвижное седло 20 только входит в соприкосновение с запорным элементом 17, не отводя его от неподвижного седла 19. В данном случае прерывается сообщение камеры 26 клапанного механизма и, следовательно, камеры 6 как с атмосферой, так и с камерой 7. Вследствие этого изменение давления в камере 6 прекращается, и его величина сохраняется на том уровне, который имел место, когда произошло соприкосновение подвижного седла 20 и запорного элемента 17.
На якорь 11 электромагнита 8 действуют две встречно направленные силы, одна из которых (Fос) создается в результате сжатия пружины 14, а второй силой, действующей справа налево согласно фигуре 1, является тяговое усилие (Fэм), развиваемое электромагнитом.
Величина Fос изменяется в зависимости от положения штока 4, поэтому она определяет величину его перемещения. Благодаря этому пружина 14 в перемещающем устройстве выполняет функции элемента обратной связи по ходу привода сцепления.
Тяговое усилие Fэм электромагнита возрастает с увеличением силы тока Iэм, проходящего через обмотку 10 электромагнита. Если, например, силовой элемент 2 находится в положении, при котором усилие Fос пружины 14 оказывается меньше усилия Fэм, развиваемого электромагнитом в результате прохождения через его обмотку определенного тока Iэм, то это приведет к тому, что якорь 11 электромагнита переместится в крайнее левое положение. Вследствие этого подвижный элемент 20 отодвигает запорный элемент от неподвижного седла 19, что обеспечит соединение камеры 6 через отверстие 25 с атмосферным давлением. В результате, давление воздуха в камере 6 превысит его давление в камере 7, следствием чего явится перемещение силового элемента слева направо, приводящее к увеличению усилия сжатия пружины 14. Такое перемещение силового элемента 2, приводящее к соответствующему уменьшению момента, передаваемого сцеплением, будет происходить до тех пор, пока вследствие увеличивающегося сжатия пружины 14 ее усилие не сравняется с тяговым усилием электромагнита. Когда это произойдет, якорь 11 электромагнита установится в положение, при котором в результате взаимодействия подвижного седла 20 и запорного элемента 17 будет обеспечено прекращение сообщения камеры 6 как с камерой 7, так и атмосферой.
Чем выше силы тока в обмотке 10 электромагнита и, следовательно, чем больше развиваемое им усилие, тем при большем сжатии пружины 14 будет достигаться равенство усилий Fос и Fэм. Вследствие этого увеличение тока в обмотке 10 электромагнита вызовет необходимость большего перемещения силового элемента 2 внутрь корпуса 1, что приведет к соответствующему уменьшению момента, передаваемого сцеплением.
Такое перемещение силового элемента окажется возможным только при условии соответствующего увеличения давления воздуха в камере 6. Это, в свою очередь означает, что после достижения условия Fос = Fэм в камере будут устанавливаться постоянное давление, величина которого окажется тем большей, чем выше сила тока в обмотке 10 электромагнита.
Если в результате изменения силы тока в обмотке электромагнита его тяговое усилие станет меньше усилия сжатия пружины 14, то это приведет к перемещению якоря 11 в крайнее правое положение, следствием чего явится соединение камеры 6 с камерой 7.
В результате начнет снижаться давление воздуха в камере 6, что приведет к уменьшению усилия FΔ, развиваемого силовым элементом и вызовет его перемещение справа налево. Следствием такого перемещения явится уменьшение усилия сжатия пружины 14, и, когда это усилие окажется равным тяговому усилию электромагнита, его якорь 11 и подвижный клапан 20 установятся в положения, при которых прекратится сообщение камеры 6 как с камерой 7, так и с атмосферой.
Соответственно этому уменьшение силы тока в обмотке 10 автоматически обеспечит установление такого давления в камере 6, которое требуется для необходимого перемещения силового элемента с возрастанием до заданной величины момента, передаваемого сцеплением.
Таким образом, в перемещающем устройстве обеспечивается изменение положения силового элемента 2 и, следовательно, регулирование момента, передаваемого сцеплением, в зависимости от величины тока Iэм в обмотке электромагнита. При этом закон регулирования момента, передаваемого сцеплением, будет определяться только характеристикой изменения силы тока Iэм в функции требуемого параметра управления (например, частоты вращения вала двигателя, скорости движения транспортного средства или положения органа привода топливоподачи).
Описанный принцип функционирования перемещающего устройства не изменяется, если для его действия взаимен источника низкого давления (разрежения) используется высокое давление. Такое исполнение перемешивающего устройства представлено на фигуре 2. Его отличие от перемещающего устройства согласно фигуре 1 заключается, во-первых, в том, что камера 7 соединяется не с источником низкого давления, а через отверстие 30 - непосредственно с атмосферой. Кроме того, камера 26 соединяется не с атмосферой, а через патрубок 31 - с источником высокого давления.
Перемещающее устройство согласно фигуре 2 действует следующим образом.
Если якорь 11 электромагнита находится в крайнем правом положении (как это показано на фигуре 2), то подвижное седло 20 отходит от запорного элемента 17, после чего этот элемент под действием пружины 23 перемещается вправо и прижимается к неподвижному седлу 19. Вследствие этого камеры 26 и 6, во-первых, отключаются от источника высокого давления и, во-вторых, через отверстия в стенках 12, 13 и якоре 11 электромагнита 8 сообщаются с камерой 7. В результате обеспечивается соединение между собой камер 6 и 7 с установлением в них одинакового (атмосферного) давления. При этом усилие FΔ становится равным нулю, и силовой элемент 2 под воздействием нажимных пружин сцепления перемещается в крайнее левое положение, чему соответствует полное включение сцепления.
Когда якорь 11 электромагнита перемещается в крайнее левое положение, то подвижное седло 20 нажимает на запорный элемент 17 и отводит его от неподвижного седла 19. Вследствие этого, во-первых, прерывается связь между камерами 7 и 26 и, во-вторых, через патрубок 31 обеспечивается сообщение камер 26 и 6 с источником высокого давления. Поскольку при этом в камере 6 устанавливается более высокое давление воздуха по сравнению с камерой 7, которая через отверстие 30 постоянно соединена с атмосферой, под действием образующейся разности давлений по обе стороны силового элемента 2 происходит его перемещение в крайнее правое положение с обеспечением полного выключения сцепления.
Если якорь 11 устанавливается в положении, при котором подвижное седло 20 только входит в соприкосновение с запорным элементом 17, не отводят его от неподвижного седла 19, то прерывается сообщение камер 26 и 6 как с источником высокого давления, так и камерой 7. Вследствие этого изменение давления в камере 6 прекращается, и его величина сохраняется на том уровне, который имел место, когда произошло соприкосновение подвижного седла запорного элемента 17.
Величина этого давления и, следовательно, значение FΔ и положения силового элемента 2 определяются, как это было рассмотрено применительно к перемещающему устройству согласно фигуре 1, только силой тока Iэм в обмотке 10 электромагнита 8.
Благодаря этому и в перемещающем устройстве, выполненном согласно фигуре 2, для регулирования положения силового элемента и, в том числе, перемещения узлов привода сцепления с целью изменения передаваемого им момента, требуется лишь по требуемому закону регулировать величину тока в обмотке 10 электромагнита 8 перемещающего устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСИАЛЬНО-ПОРШНЕВАЯ МАШИНА | 1993 |
|
RU2072436C1 |
| Двухфункциональная система управления топливоподачей двигателя транспортного средства | 1989 |
|
SU1620343A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ПЕРЕМЕННОЙ СТЕПЕНЬЮ СЖАТИЯ | 1991 |
|
RU2015377C1 |
| Устройство для управления фрикционным сцеплением транспортного средства | 1983 |
|
SU1131688A1 |
| СИСТЕМА ТОПЛИВОПОДАЧИ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2046986C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОТКИДНЫМ БОРТОМ САМОСВАЛЬНОГО КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2017636C1 |
| САМОСВАЛЬНЫЙ КУЗОВ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2017635C1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ УГЛА НАКЛОНА ПЛАТФОРМЫ САМОСВАЛА | 1991 |
|
RU2019450C1 |
| Пневматический упругий элемент транспортного средства | 1989 |
|
SU1676840A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МУФТОЙ СЦЕПЛЕНИЯ АВТОЛгОБИЛЯ | 1971 |
|
SU289696A1 |
Изобретение относится к машиностроению. Устройство содержит разделяющий две камеры силовой элемент с приводным штоком. Перемещение силового элемента осуществляется в результате создания более высокого давления воздуха в камере, где располагается приводной шток, по сравнению с давлением в другой камере. Управление устройством производится подпружиненным запорным элементом клапанного механизма, имеющего также подвижное и неподвижное седла, и электромагнитом, с якорем которого соединено подвижное седло клапанного механизма. Якорь электромагнита и оба седла клапанного механизма размещены по разные стороны запорного элемента. Полость, расположенная между седлами клапанного механизма, соединена с камерой, в которой установлен приводной шток. Устройство характеризуется повышенным быстродействием и имеет простую и надежную конструкцию. 2 ил.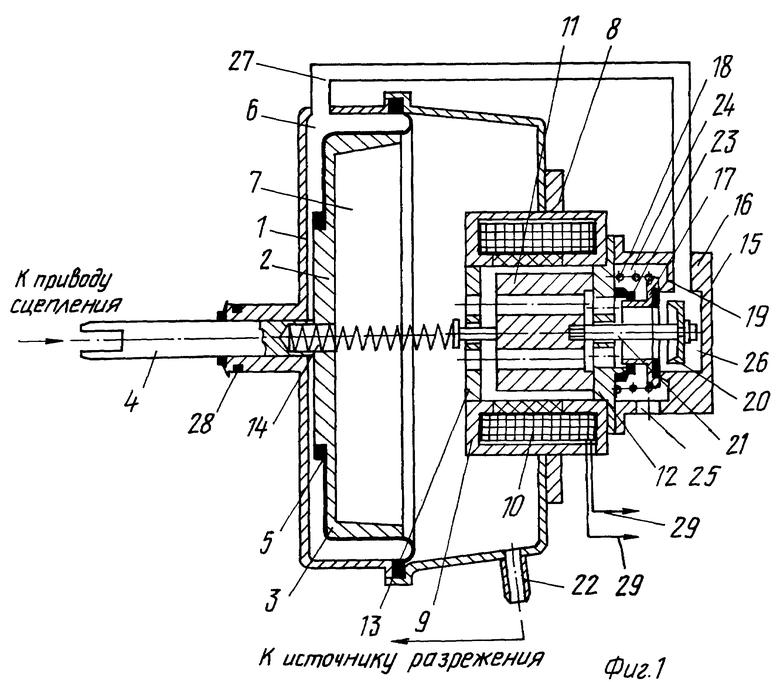
Пневматическое перемещающее устройство следящего действия с электрическим управлением, содержащее силовой элемент с приводным штоком, разделяющий пространство внутри корпуса на камеры, клапанный механизм, имеющий подвижное и неподвижное седла и подпружиненный запорный элемент, электромагнит, с якорем которого соединено подвижное седло упомянутого клапанного механизма, упругий элемент, расположенный между силовым элементом и якорем электромагнита, отличающееся тем, что якорь электромагнита и оба седла клапанного механизма размещены по разные стороны упомянутого запорного элемента, а полость, расположенная между седлами клапанного механизма, соединена с камерой, в которой установлен приводной шток.
| Устройство для управления фрикционным сцеплением транспортного средства | 1983 |
|
SU1131688A1 |
| GB 2058963 A, 15.04.81 | |||
| DE 3426150 A1, 23.01.86. | |||
