Изобретение относится к области цифровой измерительной техники.
Известно устройство для измерения температуры вращающихся деталей машины, содержащее размещенные на вращающемся объекте (роторе) датчики малых постоянных напряжений (термопары), подключенные к передающим вращающимся катушкам индуктивности по числу датчиков, неподвижно установленную приемную катушку индуктивности, которая образует с вращающимися передающими катушками бесконтактной индукционный токосъемник и индикаторный прибор. Электрический сигнал датчика возбуждает в передающей катушке магнитное поле, которое при вращении ротора индуцирует в неподвижной катушке импульс напряжения, амплитуда которого пропорциональна измеряемому сигналу датчика (Авт. свид. N 180833, кл. G 01 K 13/08, БИ N 8, 1966) Недостатком устройства является низкая точность, обусловленная зависимостью амплитуды импульса от скорости вращения и сопротивления измерительной цепи, образованной термопарой и вращающейся передающей катушкой.
Известно также устройство для измерения температуры вращающихся объектов, содержащее размещенные на роторе датчики, подключенные к передающим катушкам индукционного токосъемника, неподвижные приемные катушки которого подключены к измерительному прибору, и две неподвижные компенсационные катушки, установленные по обе стороны от плоскости вращения ротора с передающими катушками. Компенсационные катушки электрически связаны между собой и подключены к регулируемому источнику постоянного тока (Авт. свид. N 728003, кл. G 01 K 13/08, БИ N 14, 1980). Кроме того, известно устройство, преобразующее сигналы такого индукционного токосъемника в цифровой код (Авт. свид. N 901850, кл. G 01 K 13/08, БИ N 4, 1982) и устройство с компенсационной катушкой из четырех секций (Авт. свид N 830154, кл. G 01 K 13/08, БИ N 18, 1981).
Недостатком данных устройств является невысокая точность из-за воздействия высокочастотных и низкочастотных помех.
Наиболее близким по технической сущности к предлагаемому устройству является устройство для измерения температуры вращающихся объектов, содержащее расположенный на валу диэлектрический диск с передающими и приемно-компенсирующими катушками, каждая пара которых последовательно соединена между собой и соответствующим термоэлектрическим датчиком температуры, две последовательно соединенные секции неподвижной приемной катушки, выполненные на магнитопроводе и установленные симметрично по обе стороны от плоскости вращения передающих катушек, соосно с одной из них и подключенные к индикаторному прибору, две секции компенсационной катушки, установленные неподвижно по обе стороны от плоскости вращения приемнокомпенсирующих катушек симметрично относительно этой плоскости, блок синхронизации, выход которого соединен с управляющим входом генератора линейно изменяющегося тока (Авт. свид. N 1619070, кл. G 01 K 13/08, БИ N 1, 1991). Приемная катушка выполнена на магнитопроводе и разнесена с компенсационной катушкой в пространстве так, что одна из передающих вращающихся катушек расположена между двумя секциями приемной катушки и соосно с ними, а соответствующая приемно-компненсирующая катушка расположена между двумя секциями компенсационной катушки на оси их симметрии. Поле компенсационной катушки индуцирует в приемно-компенсирующей вращающейся катушке постоянно ЭДС, которая вычитается из ЭДС термоэлектрического датчика температуры. О величине сигнала датчика и, следовательно, об измеряемой температуре судят по скорости нарастания тока генератора линейно изменяющегося тока, при которой выходной сигнал приемной катушки равен нулю, т. е. при которой происходит компенсация ЭДС датчика и ЭДС, индуцируемой в приемнокомпенсирующей катушке.
Недостатком данного устройства является невысокая точность из-за воздействия как высокочастотных, так и низкочастотных помех промышленной частоты и помех от намагниченных частей ротора и статора. Под воздействием помех смещается нулевой уровень сигнала в приемной катушке, что приводит к большим погрешностям измерения, особенно при малом уровне сигнала, т.е. в момент компенсации, когда и происходит измерение. Для борьбы с высокочастотными помехами используется интегрирование сигнала и помех.
Однако при интегрировании влияние низкочастотных помех и помех от постоянных магнитных полей не устраняется. Помехи промышленной частоты 50 Гц также можно считать помехами постоянного тока, т.к. при частоте вращения, например, 15000 об/мин и числе каналов 16 период следования катушек составляет 250 мкс, что на два порядка меньше периода помехи. При воздействии постоянной помехи выходной сигнал интегратора будет линейно изменяющимся за время интегрирования. Этот сигнал складывается с информационным сигналом, что приводит к появлению погрешности.
В основу изобретения поставлена задача повышения точности и помехозащищенности устройства.
Данная задача решается тем, что в устройство, содержащее расположенный на валу вращающегося объекта диэлектрический диск с передающими и приемно-компенсирующими катушками, каждая пара которых последовательно соединена между собой и с соответствующим датчиком температуры, две размещенные на магнитопроводе последовательно соединенные секции неподвижной приемной катушки, установленные симметрично по обе стороны от плоскости вращения передающих катушек, соосно с одной из них, подключенные к измерительному прибору, две секции компенсационной катушки, установленные неподвижно по обе стороны от плоскости вращения приемно-компенсирующих катушек, симметрично относительно этой плоскости, которые электрически соединены между собой и подключены к генератору линейно изменяющегося тока, со входом запуска которого соединены выход основного блока синхронизации, отличающееся тем, что измерительный прибор состоит из усилителя, интегратора и аналого-цифрового преобразователя, цифровой выход которого подключен к блоку обработки данных, а скорость нарастания тока генератора линейно изменяющегося тока определяется кодом, подаваемым блоком обработки данных на управляющий вход генератора линейно изменяющегося тока, выход основного блока синхронизации соединен со входом сброса интегратора, в устройство введен повторитель временных интервалов, первый вход которого подключен к выходу основного блока синхронизации, а второй - к выходу дополнительного блока синхронизации, смещенного от основного блока синхронизации по окружности, на которой расположены синхроотверстия, на половину расстояния между ними, причем выход дополнительного блока синхронизации и выход повторителя временных интервалов объединены по схеме "ИЛИ" и подключены ко входу запуска аналого-цифрового преобразователя. Выходной сигнал интегратора представляет сумму информационного сигнала колоколообразной формы и сигнала помехи. Сигнал помехи на входе аналого-цифрового преобразователя (АЦП) линейно возрастает или убывает на интервале интегрирования в зависимости от полярности постоянной помехи на входе интегратора. Поэтому для устранения влияния помехи необходимо произвести вычитание из результата преобразования АЦП кода соответствующего амплитуде проинтегрирования сигнала помехи. Для этого производится второе измерение в конце интервала интегрирования, когда информационный сигнал на входе АЦП равен нулю, а проинтегрированный сигнал помехи по амплитуде в два раза превышает амплитуду помехи в момент первого измерения. Затем в блоке обработки данных из результата первого измерения вычитается половина второго. Первый запуск АЦП обеспечивается синхроимпульсом через некоторый интервал времени τ начала интегрирования. Второй запуск АЦП осуществляет повторитель временных интервалов через промежутки времени 2τ с начала интегрирования. Таким образом результат преобразования АЦП не будет зависеть от сигнала помехи.
На фиг. 1 представлена структурная схема устройства.
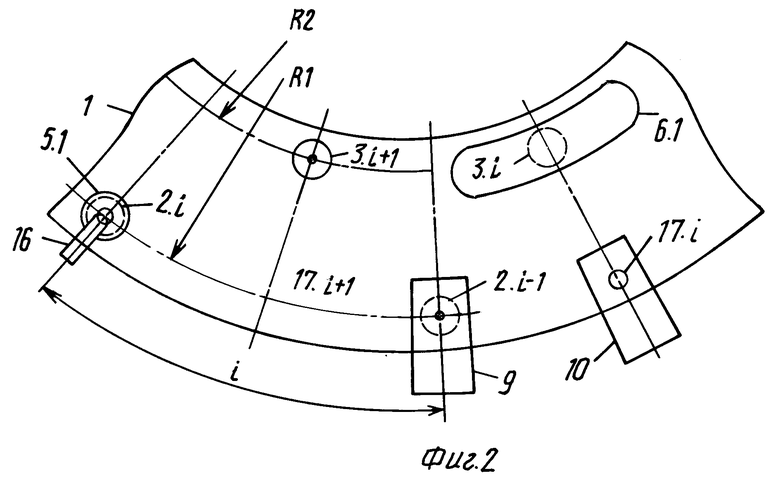
Фиг. 2 - устройство бесконтактного индукционного токосъемника.
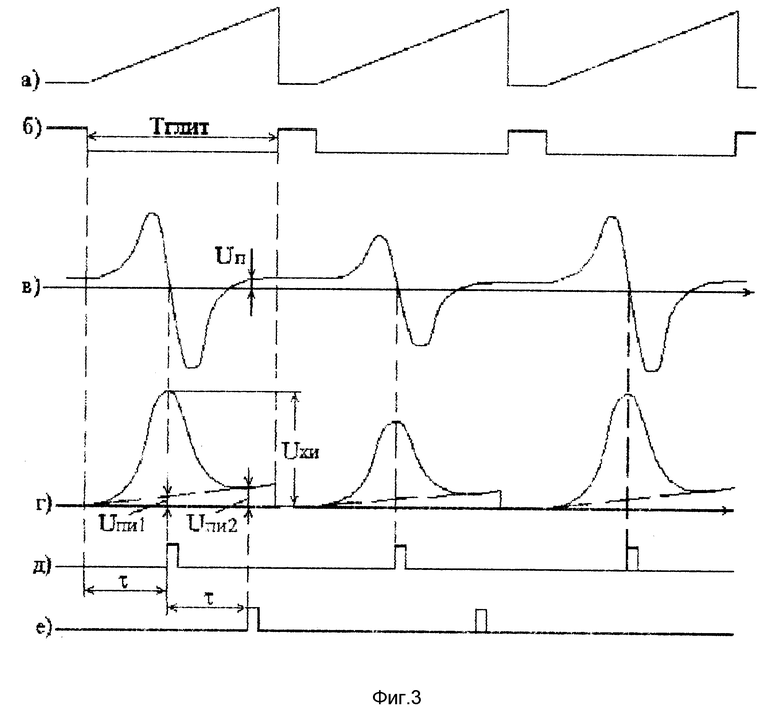
Фиг. 3 - временные диаграммы работы устройства.
Устройство (фиг. 1) содержит диэлектрический диск 1, который крепится на валу вращающегося объекта. На диске равномерно по окружности радиуса R1 установлены передающие катушки 2.l...2.i,...2n. по числу датчиков. Приемно-компенсирующие вращающиеся катушки 3.l,...3.i,...3.n. расположены на окружности большого радиуса R2 посредине между передающими. Каждая пара катушек (например 2.i и 3.i) соединены между собой последовательно и подключены к соответствующему датчику 4.i. На неподвижном основании (статоре) установлена приемная катушка с двумя секциями обмотки 5.1, 5.2., электрически соединенные между собой согласно и подключены к усилителю 7. На том же неподвижном статоре соосно с передающей катушкой 2.i. установлена компенсационная катушка, состоящая из двух секций 6.1, 6.2, которые также электрически соединены между собой согласно, расположены симметрично по обе стороны от диэлектрического диска 1 и подключены к выходу генератора линейно изменяющегося тока 8. Чтобы и исключить взаимное влияние катушек 5 и 6, они разнесены в пространстве, например установлены на диаметрально противоположных сторонах диска. Форма витков компенсационной катушки такая же, как и в прототипе, витки расположены вдоль радиуса R2, образованного центрами вращающихся приемно-компенсирующих катушек 3. Основной блок синхронизации 9 и дополнительный блок синхронизации 10 аналогичны соответствующему блоку синхронизации прототипа. Выход основного блока синхронизации 9 соединен с входом запуска генератора линейно изменяющегося тока 8, входом сброса интегратора 11 в исходное состояние и первым входом повторителя временных интервалов 12. Выход усилителя 7 подключен ко входу интегратора 11, а выход интегратора соединен с аналоговым входом АЦП 13. Цифровой выход АЦП подключен к блоку обработки данных 14. Дополнительный блок синхронизации 10 установлен неподвижно и смещен относительно основного 9 по окружности, на которой расположены синхроотверстия 17. l,...17.i....17.n (фиг. 2), на половину расстояния между синхроотверстиями. Выход дополнительного блока синхронизации 10 и выход повторителя временных интервалов 12 подключены к входам логической схемы "ИЛИ" 15, а ее выход соединен с входом запуска АЦП. Первый вход повторителя временных интервалов 12 подключен к выходу основного блока синхронизации 9, а второй вход - к выходу дополнительного блока синхронизации 10.
Описание работы устройства приведено на примере i-го канала. Постоянный ток в цепи последовательно соединенных катушек 2.1, 3.i возбуждает в них магнитное поле. Это поле при прохождении катушки 2.i между обмотками приемной катушки 5.1, 5.2 наводит в ней двуполярный импульс ЭДС (фиг. 3в). Постоянная помеха смещает сигнал на величину Uп. Двуполярный информационный импульс и помеха усиливаются усилителем 7 и подаются на интегратор 11. Интегрирование сигнала и помехи начинаются по окончании тактового импульса (фиг. 3б), вырабатываемого основным блоком синхронизации 9, и длится до начала следующего тактового импульса. Сигнал на выходе интегратора следующего тактового импульса. Сигнал на выходе интегратора (фиг. 3г) имеет колоколообразную форму и достигает амплитудного значения Uхи, когда катушка 2.i находится соосно с приемной катушкой 5 спустя интервал времени τ от начала интегрирования. В этом момент синхроотверстие 17.i находится соосно с дополнительным блоком синхронизации 10, который вырабатывает синхроимпульс (фиг. 3д). При этом сигнал помехи на выходе интегратора достигает значения Uпи1 (фиг. 3г). Синхроимпульс (фиг. 3д) проходит через схему "ИЛИ" 15 и запускает АЦП 13. Цифровой код Nх с выхода АЦП, соответствующий амплитуде Uхи, поступает в блок обработки данных 14, где запоминается. Спустя промежуток времени τ после синхроимпульса (фиг. 3д) повторитель, временных интервалов 12 вырабатывает импульс (фиг. 3e), который повторно запускает АЦП. В этот момент времени амплитуда сигнала на выходе интегратора Uпи2 (фиг. 3г) определяется только проинтегрированный помехой, т.к. интеграл от полезного сигнала равен нулю. Цифровой код АЦП, соответствующий амплитуде Uпи2, в блоке обработки данных 14 уменьшается в два раза и вычитается из результата первого преобразования. Таким образом устраняется влияние постоянной помехи, воздействующей на приемную катушку. Генератор линейно изменяющегося тока 8 вырабатывает ток (фиг. 3а) в течение интервала интегрирования Tглит. В это время приемно-компенсирующая катушка 3. i находится в зоне действия поля компенсационной катушки 6. При подаче на компенсационную катушку линейно нарастающего тока между секциями 6.1 и 6.2 является линейно нарастающим. При этом наводимая в приемно-компенсирующей катушке 3. i постоянная ЭДС будет определяться лишь скоростью нарастания тока в катушке 6. В приемной катушке 5 будет индуцирован сигнал (фиг. 3.в), амплитуда которого пропорциональна разности ЭДС термоэлектрического датчика и наведенной в катушке 3.i постоянной ЭДС. При равенстве этих ЭДС достигается их компенсация, амплитуда сигнала в приемной катушке и на входе АЦП при отсутствии помех равна нулю. По скорости нарастания линейно изменяющегося тока при достижении компенсации можно судить об ЭДС датчика. Скорость нарастания линейно изменяющегося тока определяется кодом, подаваемым блоком обработки данных 14 на управляющий вход генератора линейно изменяющегося тока 8. Таким образом, значение кода, выдаваемого блоком обработки данных, в момент компенсации, т.е. когда Nх=0, будет однозначно определять ЭДС термоэлектрического датчика и по величине кода, выдаваемого блоком обработки данных, судят об измеряемой температуре. Значение кода определяется расчетным путем по результатам ряда измерений для нескольких стандартных значений кода ГЛИТ, также как в устройстве, реализующем прототип. Код ГЛИТ при каждом измерении изменяется от некоторого максимального значения до нуля. Обработка результатов измерений производится по методу наименьших квадратов, что позволяет снизить влияние помех, приводящих к разбросу результатов измерений. Таким образом, устройство позволяет повысить точность и помехозащищенность за счет введения повторителя временных интервалов, интегрирования измерительного сигнала, проведения двух измерений - спустя время τ и 2τ от начала интегрирования, что обеспечивается повторителем временных интервалов, вычитания половины второго измерения из первого в блоке обработки данных. При этом устраняется влияние помех, постоянных на интервале интегрирования 2τ.е
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 1995 |
|
RU2110050C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 2004 |
|
RU2281467C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2082076C1 |
| УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ ПОМЕХ В ЛИНИИ ПЕРЕДАЧИ БИНАРНЫХ СИГНАЛОВ | 1998 |
|
RU2142195C1 |
| Устройство для измерения температуры вращающихся объектов | 1988 |
|
SU1619070A1 |
| УСТРОЙСТВО ДЛЯ ПОДГОНКИ РЕЗИСТОРОВ | 1992 |
|
RU2063082C1 |
| МЕТАЛЛООБНАРУЖИТЕЛЬ | 2000 |
|
RU2190866C2 |
| ВИХРЕТОКОВОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1992 |
|
RU2044312C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2207523C1 |
| ДЕТЕКТОР КОСМИЧЕСКОЙ ПЫЛИ | 1997 |
|
RU2134435C1 |
Изобретение относится к области цифровой измерительной техники. Устройство для измерения температуры вращающихся объектов содержит диэлектрический диск, который крепится на валу вращающегося объекта, на диске установлены передающие катушки и приемно-компенсирующие вращающиеся катушки. Каждая пара катушек последовательно соединена между собой и с соответствующим датчиком температуры. На магнитопроводе размещены последовательно соединенные секции неподвижной приемной катушки. Секции приемной катушки установлены симметрично по обе стороны от плоскости вращения передающих катушек, соосно с одной из них. Приемная катушка подключена к измерительному прибору. Секции компенсационной катушки установлены неподвижно по обе стороны от плоскости вращения приемно-компенсирующих катушек. Секции компенсационной катушки соединены между собой и подключены к генератору линейно изменяющегося тока. Вход запуска генератора соединен с выходом основного блока синхронизации. Измерительный прибор состоит из усилителя, интегратора и аналого-цифрового преобразователя. Цифровой выход аналого-цифрового преобразователя подключен к блоку обработки данных. Блок обработки данных соединен с управляющим входом генератора. В устройство введен повторитель временных интервалов. Повторитель временных интервалов соединен с основным и дополнительным блоками синхронизации. Такое выполнение устройства повышает точность измерений и помехозащищенность последнего. 3 ил.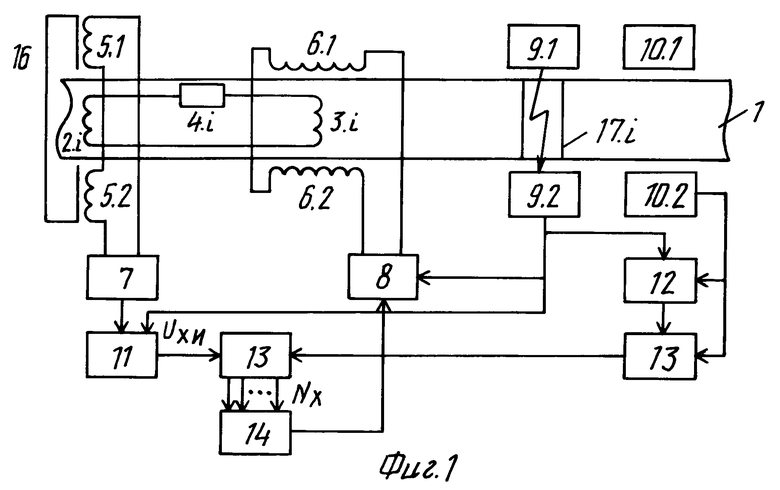
Устройство для измерения температуры вращающихся объектов, содержащее расположенный на валу вращающегося объекта диэлектрический диск с передающими и приемно-компенсирующими катушками, каждая пара которых последовательно соединена между собой и соответствующим датчиком температуры, две размещенные на магнитопроводе последовательно соединенные секции неподвижной приемной катушки, установленные симметрично по обе стороны от плоскости вращения передающих катушек, соосно с одной из них, подключенные к измерительному прибору, две секции компенсационной катушки, установленные неподвижно по обе стороны от плоскости вращения приемно-компенсирующих катушек, симметрично относительно этой плоскости, которые электрически соединены между собой и подключены к генератору линейно изменяющегося тока, со входом запуска которого соединен выход основного блока синхронизации, отличающееся тем, что измерительный прибор состоит из усилителя, интегратора и аналого-цифрового преобразователя, цифровой выход которого подключен к блоку обработки данных, а скорость нарастания тока генератора линейно изменяющегося тока определяется кодом, подаваемым блоком обработки данных на управляющий вход генератора линейно изменяющегося тока, выход основного блока синхронизации соединен со входом сброса интегратора, в устройство введен повторитель временных интервалов, первый вход которого подключен к выходу основного блока синхронизации, а второй - к выходу дополнительного блока синхронизации, смещенного от основного блока синхронизации по окружности, на которой расположены синхроотверстия, на половину расстояния между ними, причем выход дополнительного блока синхронизации и выход повторителя временных интервалов объединены по схеме ИЛИ и подключены ко входу запуска аналого-цифрового преобразователя.
| Устройство для измерения температуры вращающихся объектов | 1988 |
|
SU1619070A1 |
| DE 2852679 A1, 19.06.80 | |||
| Устройство для измерения температуры вращающихся объектов | 1980 |
|
SU901850A1 |
| Устройство для измерения температурыВРАщАющиХСя дЕТАлЕй МАшиН | 1979 |
|
SU830154A1 |
