Изобретение предназначено для измерения фазы, частоты и амплитуды колебаний лопаток турбомашин и может быть использовано в турбомашиностроении для бесконтактного измерения параметров колебаний лопаток, для индикации усталостной прочности материала лопаток, предупреждения повреждения или обрыва лопаток.
Известен способ определения колебательной скорости лопаток турбомашин и устройство для его осуществления (авторское свидетельство СССР 771477, бюл. 38, 1980), заключающийся в том, что измеряют окружное расстояние между двумя бесконтактными импульсными датчиками положения, установленными по окружности в плоскости вращения рабочего колеса, измеряют временные интервалы между импульсами датчиков и аналитически вычисляют колебательные скорости лопаток.
Недостатком известного способа и устройства, его реализующего, является невысокая точность измерений вследствие использования косвенных зависимостей между информационным измеряемым параметром и временными положениями импульсов датчиков, низкая информативность измерений.
Наиболее близким по технической сущности к предлагаемому изобретению является способ определения параметров колебаний лопаток турбомашины (Заблоцкий И. Е., Коростелев Ю.А., Шипов Р.А. Бесконтактные измерения колебаний лопаток турбомашин. М., "Машиностроение". 1977, с. 33-34, 125-134; авторское свидетельство СССР 236827, бюл. 7, 1969), заключающийся в том, что устанавливают в корпусе турбомашины в плоскости вращения рабочего колеса два импульсных бесконтактных датчика, измеряют временные интервалы между импульсами датчиков и по ним вычисляют аналитически амплитуды скоростей и перемещений торцов лопаток, затем также аналитически определяют частоту колебаний лопаток.
Известный способ осуществляется устройством (Заблоцкий И.Е., Коростелев Ю. А. , Шипов Р.А. Бесконтактные измерения колебаний лопаток турбомашин. М., "Машиностроение", 1977, с. 33-34, 125-134; авторское свидетельство СССР 236827, бюл. 7, 1969), содержащим блок периферийных датчиков, оборотный и корневой датчики, блок преобразования временных интервалов в код, блок управления, выходной регистр и электронную вычислительную машину.
Недостатками известного способа и устройства, его реализующего, являются методически обусловленные низкая точность, достоверность и небольшой диапазон измерений (первые две, три формы колебаний), поскольку измеряемый параметр обратно пропорционален квадрату величины окружной скорости лопаток.
В основу изобретения поставлена задача увеличения точности, достоверности, расширения диапазона измерений фазы, частоты и амплитуды колебаний лопаток вращающегося колеса турбомашины.
Для достижения поставленной цели в способе определения частоты и амплитуды колебаний лопаток вращающегося колеса турбомашины устанавливают в корпусе турбомашины неподвижный бесконтактный датчик, согласно изобретению отличающемся тем, что бесконтактный датчик выполняют в виде автодинного СВЧ преобразователя, например, на основе диода Ганна (Воторопин С.Д., Носков В. Я. Приемопередающие модули на слаботочных диодах Ганна для автодинных систем. Электронная техника. Сер. СВЧ-техника. Вып. 4(458), 1993), ориентируют его в плоскости вращения лопаточного колеса или в параллельной ей плоскости таким образом, чтобы ось диаграммы направленности излучения автодинного преобразователя была перпендикулярна геометрической оси периферийной части плоскости пера лопатки, на неподвижном узле турбомашины устанавливают оборотный датчик и напротив него на ее роторе оборотную метку, регистрируют с помощью автодинного преобразователя сигнал с доплеровским изменением частоты, детектируют сигнал по амплитуде и компарируют его для формирования синхронизирующих импульсов, соответствующих конкретным лопаткам, формируют на основании импульсов оборотного датчика сигнал опорной частоты, пропорциональной частоте вращения ротора для обеспечения работы синхронного детектора, детектируют частотно-модулированный доплеровский сигнал автодинного преобразователя с помощью синхронного детектора и выделяют компоненту, соответствующую колебательному процессу лопатки, а затем по параметрам продетектированного сигнала аналитически определяют фазу, частоту и амплитуду колебаний каждой лопатки вращающегося колеса турбомашины.
Для реализации способа в известное устройство, содержащее периферийный неподвижный бесконтактный датчик, оборотный неподвижный бесконтактный импульсный датчик (ОД) и электронную вычислительную машину (ЭВМ), дополнительно введены блок регистрации отраженного сигнала (БРОС), вход которого соединен с выходом периферийного датчика, БРОС выполнен в виде автодинного СВЧ преобразователя (АП), например, по типу приемопередающего модуля на диоде Ганна (Воторопин С. Д., Носков В.Я. Приемопередающие модули на слаботочных диодах Ганна для автодинных систем. Электронная техника. Сер. СВЧ-техника. Вып. 4(458), 1993), усилитель-ограничитель (УО), вход которого подключен к выходу БРОС, синхронный детектор (СД) и амплитудный детектор (АД), входы которых соединены с выходом УО, формирователь импульсов оборотного датчика (ФО), вход которого соединен с выходом ОД, блок преобразования временного интервала в напряжение (БПВИН), вход которого подключен к выходу (ФО), управляемый генератор (УГ), управляющий вход которого соединен с выходом БПВИН, а выход УГ соединен со вторым входом СД, компаратор (К) аналоговых сигналов, вход которого подключен к выходу АД, аналого-цифровой преобразователь (АЦП), информационный вход которого соединен с выходом СД, а управляющий вход подключен к выходу К, цифровые выходы АЦП подключены к первой части входных разрядов цифрового интерфейса ЭВМ, например, PC типа IBM, вторая часть входных разрядов цифрового интерфейса ЭВМ подключена к выходу ФО, а третья часть входных разрядов цифрового интерфейса ЭВМ соединена с выходом К.
Предлагаемое техническое решение обладает новизной, т.к. авторам не известны способы и устройства, содержащие признаки, фигурирующие в предлагаемом изобретении в качестве отличительных.
Увеличение точности, достоверности, расширение диапазона измерений фазы, частоты и амплитуды колебаний лопаток вращающегося колеса турбомашины, в предлагаемом способе и устройстве, его реализующем, достигается за счет использования автодинного СВЧ преобразователя, регистрацией частотно-модулированного сигнала доплеровской частоты, выделением из частотно-модулированного доплеровского сигнала компоненты, соответствующей колебательному движению лопаток, и аналитической обработкой параметров этой составляющей.
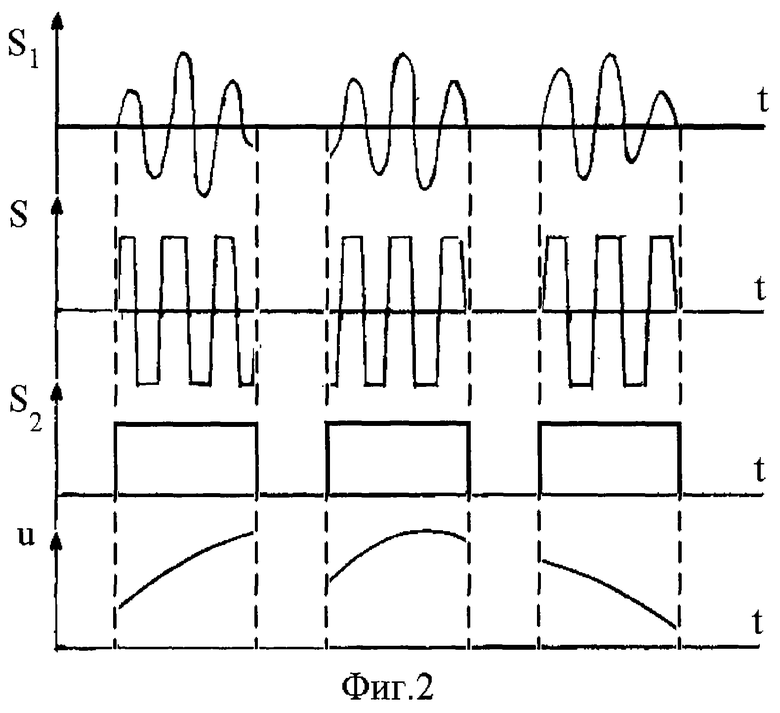
Сущность изобретения поясняется чертежами, где на фиг.1 представлена структурная схема устройства, реализующего предложенный способ; на фиг.2 и 3 приведены эпюры, поясняющие работу предложенного устройства.
Определение фазы, частоты и амплитуды колебаний лопаток вращающегося колеса турбомашины по предложенному способу осуществляется следующим образом.
На диске лопаточного колеса или на роторе турбомашины устанавливают возбудитель оборотной метки в виде, например, металлического штифта, а на неподвижной детали двигателя напротив траектории движения возбудителя устанавливают импульсный бесконтактный датчик, например, емкостного или индуктивного типа, регистрируют электрические импульсы, получаемые в результате взаимодействия возбудителя с импульсным датчиком. Устанавливают в корпусе турбомашины в плоскости вращения лопаточного колеса или в параллельной ей плоскости неподвижный автодинный СВЧ преобразователь, выполненный, например, в виде приемопередающего модуля на диоде Ганна, таким образом, чтобы ось диаграммы направленности излучения автодинного преобразователя была перпендикулярна геометрической оси периферийной части плоскости пера лопатки.
Автодинный СВЧ преобразователь - это приемопередающая система, параметры выходного сигнала в которой изменяются под воздействием отраженного излучения, принятого от объекта исследования. Если исследуемый объект перемещается относительно неподвижного автодинного преобразователя, то при автодетектировании в цепи его смещения наблюдается сигнал доплеровской частоты.
Регистрируют частотно-модулированный сигнал доплеровской частоты на выходе автодинного преобразователя, ограничивают его по амплитуде и устраняют тем самым паразитную амплитудную модуляцию. Формируют с помощью вспомогательного управляемого генератора сигнал опорной частоты, пропорциональной частоте вращения ротора, для этого преобразуют временной интервал между импульсами оборотного датчика - период вращения ротора - в аналоговое напряжение для управления вспомогательным генератором. Детектируют ограниченный по амплитуде сигнал с помощью синхронного детектора и выделяют тем самым из частотно-модулированного сигнала компоненту, соответствующую колебательному процессу лопатки, а затем по параметрам продетектированного сигнала с помощью ЭВМ аналитически определяют фазу, частоту и амплитуду колебаний каждой лопатки вращающегося колеса турбомашины.
Известно, что доплеровская частота на выходе автодинного преобразователя
где ω0 - рабочая частота генерации автодинного преобразователя;
с - скорость света в вакууме;
V - мгновенная линейная скорость, в данном случае, периферийной части поверхности лопатки.
При вращении лопаточного колеса мгновенная скорость движения торца лопатки, а соответственно, и доплеровская частота будет складываться из двух составляющих
где VR; ωDR - соответственно мгновенная скорость и доплеровская частота, обусловленная круговым движением торца лопатки, вследствие вращения ротора турбомашины;
VL; ωDL - соответственно мгновенная скорость и доплеровская частота, обусловленная колебательным движением торца лопатки.
Если колебания лопатки близки к гармоническим, то закон движения периферийной части лопатки можно описать уравнением
х=ASin(Ωt+ϕ),
где А - амплитуда колебаний торца лопатки;
Ω - частота колебаний торца лопатки;
ϕ - начальная фаза колебаний торца лопатки.
Тогда мгновенная скорость колебательного движения торца лопатки
поэтому мгновенная частота выходного сигнала автодинного преобразователя
Для реальных турбоагрегатов доплеровская частота, вызванная окружным движением торца лопатки вследствие вращения ротора турбомашины, имеет порядок нескольких сотен кГц, а доплеровское приращение, вызванное колебательным движением торца лопатки, имеет порядок нескольких сотен Гц, вследствие этого выходной сигнал автодинного преобразователя, в первом приближении, можно считать квазигармоническим и тогда полная фаза выходного сигнала, в соответствии с (Гоноровский И. С. Радиотехнические цепи и сигналы. М., "Радио и связь". 1986, с. 82)
поэтому аналитическое выражение информационного сигнала после ограничения по амплитуде - устранения паразитной амплитудной модуляции - принимает следующий вид:
Полученный сигнал можно рассматривать как модулированный по частоте, причем доплеровская частота, обусловленная круговым движением торца лопатки ωDR, связана прямо пропорционально с частотой вращения ротора турбомашины ωR
где R; Tr - радиус и период вращения лопаточного колеса.
Поэтому, если при синхронном детектировании в качестве опорной частоты использовать величину MωR, то из сигнала s(t) выделяется компонента, содержащая в своем составе параметры колебаний лопатки
Таким образом получается, что действительно в выходном сигнале синхронного детектора содержится информация о начальной фазе, частоте и амплитуде колебаний лопатки.
Устройство для определения фазы, частоты и амплитуды колебаний лопаток вращающегося колеса турбомашины (фиг.1) содержит автодинный СВЧ преобразователь 1, выполненный, например, в виде приемопередающего модуля на основе диода Ганна, который установлен в корпусе 2 турбомашины, блок 3 регистрации отраженного сигнала, выполненный, например, в соответствии с одной из схем, представленных в (Воторопин С. Д., Носков В.Я. Приемопередающие модули на слаботочных диодах Ганна для автодинных систем. Электронная техника. Сер. СВЧ-техника. Вып. 4(458), 1993), вход которого подключен к выходу автодинного преобразователя 1, усилитель-ограничитель 4, вход которого соединен с выходом блока 3 регистрации отраженного сигнала, синхронный детектор 5 и амплитудный детектор 6, входы которых подключены к выходу усилителя-ограничителя 4, компаратор 7 аналоговых сигналов, вход которого соединен с выходом амплитудного детектора, возбудитель 8 оборотной метки, установленный на роторе или диске лопаточного колеса, импульсный оборотный датчик 9, установленный на неподвижной детали турбомашины напротив траектории движения возбудителя 8, формирователь 10 импульсов оборотной метки, вход которого подключен к выходу оборотного датчика 9, блок 11 преобразования временного интервала в аналоговое напряжение, вход которого соединен с выходом формирователя 10 оборотной метки, управляемый генератор 12, управляющий вход которого подключен к выходу блока 11 преобразования временного интервала в напряжение, а выход генератора 12 соединен со вторым входом синхронного детектора 5, аналого-цифровой преобразователь 13, информационный вход которого подключен к выходу синхронного детектора 5, а вход синхронизации соединен с выходом компаратора 7, ЭВМ 14, например, типа PC IBM, разряды входного цифрового интерфейса которой распределены на три части, и ко входам первой части подключены цифровые выходы аналого-цифрового преобразователя 13, ко входу второй части подключен выход формирователя 10 оборотной метки, а вход третьей части - синхронизирующий вход - соединяется с выходом компаратора 7, ЭВМ является выходным блоком устройства и позволяет получать, запоминать, обрабатывать по определенному алгоритму входную информацию, хранить и выдавать конечную информацию в необходимом для пользователя виде, отображая, например, полученные результаты на экране монитора.
Устройство, реализующее предлагаемый способ определения параметров колебаний лопаток вращающегося колеса турбомашины (фиг.1), работает следующим образом.
Автодинный преобразователь 1, установленный в корпусе 2 турбомашины, генерирует СВЧ излучение, направленное на периферийную часть плоскости пера лопатки, отраженное от плоскости лопатки излучение воздействует на активный элемент автодинного преобразователя 1 и изменяет его энергетические параметры. Эти изменения регистрируются блоком 3 регистрации отраженного сигнала, таким образом, что выделяется частотно-модулированный сигнал доплеровской частоты на его выходе (фиг.2, сигнал s1), содержащий в своем составе частоту, обусловленную круговым движением лопатки, и составляющую, обусловленную колебательным движением лопатки. Далее этот сигнал поступает на вход усилителя-ограничителя 4, где происходит его усиление и ограничение по амплитуде, и тем самым устраняется паразитная амплитудная модуляция (фиг.2, сигнал s). Ограниченный по амплитуде сигнал поступает на входы синхронного детектора 5 и амплитудного детектора 6. Для формирования синхронизирующих импульсов, соответствующих конкретным лопаткам, сигнал с выхода амплитудного детектора 6 поступает на аналоговый компаратор 7, с выхода которого снимаются прямоугольные импульсы (фиг. 2, сигнал s2), каждый из которых соответствует конкретной лопатке в колесе. Оборотная метка 8, установленная, например, на диске лопаточного колеса, проходя возле импульсного оборотного датчика 9, формирует на его выходе сигнал взаимодействия, который подается на формирователь 10 оборотной метки. Сформированный по амплитуде и длительности прямоугольный импульс далее поступает на вход блока 11 преобразования временного интервала (периода вращения ротора турбомашины) в управляющее напряжение, которое затем подается на управляющий вход управляемого генератора 12 и изменяет частоту на его выходе пропорционально частоте вращения ротора двигателя. Выходные колебания управляемого генератора 12, всегда с частотой, пропорциональной частоте вращения ротора турбомашины, и являющиеся опорными для синхронного детектирования, поступают на второй вход синхронного детектора 5, в результате детектирования на выходе которого формируется напряжение (фиг.2, сигнал u), отображающее закон колебательного движения лопатки в течение времени существования отраженного излучения от конкретной лопатки, причем параметры этого напряжения содержат информацию о фазе, частоте и амплитуде колебаний лопаток. Далее, напряжение с выхода синхронного детектора подается на информационный вход аналого-цифрового преобразователя 13, а на его вход синхронизации поступают прямоугольные импульсы с компаратора 7. Аналого-цифровой преобразователь 13 производит преобразование выходного аналогового напряжения синхронного детектора к цифровому виду с привязкой к конкретной лопатке колеса в соответствии с синхронизирующими импульсами компаратора 7. Информационный цифровой код с выхода АЦП 13 поступает на первую часть входных разрядов цифрового интерфейса ЭВМ 14, например, типа PC IBM, на вторую часть входных разрядов цифрового интерфейса ЭВМ подаются прямоугольные импульсы с формирователя оборотной метки, а на третью часть входных разрядов цифрового интерфейса ЭВМ подаются синхронизирующие импульсы с компаратора 7. В ЭВМ осуществляется привязка оцифрованного напряжения синхронного детектора к текущему времени за счет внутреннего таймера компьютера и по синхронизирующим импульсам компаратора 7 определяется номер конкретной лопатки колеса в привязке к оборотной метке. Кроме этого, в ЭВМ реализуется алгоритм аналитического определения фазы, частоты и амплитуды колебаний лопаток по трем выборкам, взятым через равные промежутки времени, из оцифрованного сигнала синхронного детектора.
Алгоритм определения частоты и амплитуды колебаний лопаток можно пояснить следующим образом.
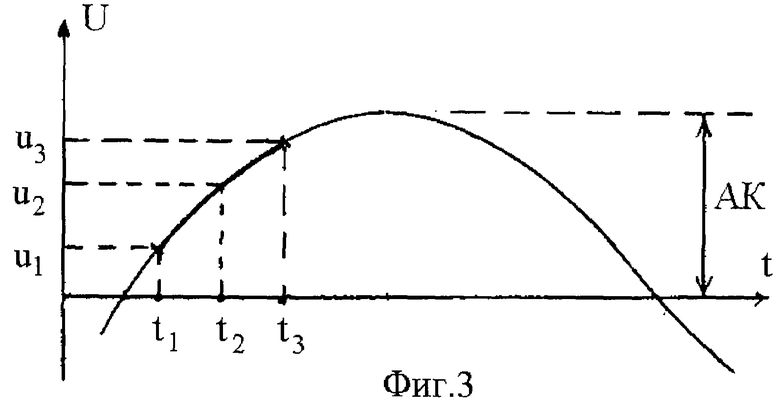
На фиг.3 приведен выходной сигнал синхронного детектора, который существует в течение времени (t1... t3) и является фрагментом колебательного движения u(t) некоторой конкретной лопатки, причем в момент времени t1 напряжение на выходе синхронного детектора 5 равно u1, в момент времени t2 оно равно u2, а в момент времени t3 равно u3. Временные интервалы (t2-t1)=(t3-t2)= τ, амплитуда колебания с учетом коэффициентов преобразования отдельных узлов устройства равна АК, в этом случае приведенные на фиг.3 величины можно связать между собой следующими уравнениями:
u1=AKSin(Ωt1+ϕ),
u2=AKSin[Ω(t1+τ)+ϕ],
u3=AKSin[Ω(t1+2τ)+ϕ].
Решив эту систему уравнений, можно получить, что
отсюда частота колебаний лопатки определяется точным аналитическим выражением
Для определения начальной фазы можно исходить из отношения
или
отсюда
Амплитуда колебаний лопатки
В выражение для определения амплитуды колебаний лопатки входит коэффициент передачи измерительной системы к, который определяется, например, при калибровочных измерениях.
При выполнении алгоритма аналитического определения параметров колебаний лопаток можно наложить ограничения, позволяющие исключить появление неопределенностей типа деления на ноль, либо проводить дополнительный анализ таких ситуаций.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН | 2000 |
|
RU2189567C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУД КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН | 2002 |
|
RU2207524C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584723C1 |
| СИГНАЛИЗАТОР ПРЕДАВАРИЙНЫХ ДЕФОРМАЦИЙ ЛОПАТОК ТУРБОМАШИН | 2000 |
|
RU2177145C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСКРУТКИ И АМПЛИТУДЫ КРУТИЛЬНОЙ СОСТАВЛЯЮЩЕЙ КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337330C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2152590C1 |
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДЫ КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2341781C2 |
| СИСТЕМА ПОДАЧИ ГАЗА В ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2042856C1 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЗУБЧАТЫХ КОЛЕС И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2602488C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ТЕЛ В СЛАБОПРОВОДЯЩИХ СРЕДАХ | 2000 |
|
RU2193189C2 |
Изобретение предназначено для измерения фазы, частоты и амплитуды колебаний лопаток турбомашин и может быть использовано для индикации усталостной прочности материала лопаток, предупреждения повреждения или обрыва лопаток. Сущность: устанавливают в корпусе турбомашины автодинный СВЧ преобразователь, оборотный датчик и оборотную метку. Регистрируют с помощью автодинного преобразователя сигнал с доплеровским изменением частоты, детектируют частотно-модулированный сигнал автодинного преобразователя, выделяют компоненту, соответствующую колебательному движению лопатки. Затем аналитически определяют фазу, частоту и амплитуду колебаний каждой лопатки вращающегося колеса турбомашины. Устройство содержит периферийный автодинный СВЧ преобразователь, оборотный бесконтактный датчик, формирователь импульсов оборотного датчика, блок регистрации отраженного сигнала, усилитель-ограничитель, синхронный детектор и амплитудный детектор, блок преобразования временного интервала в напряжение, управляемый генератор, компаратор аналоговых сигналов, аналого-цифровой преобразователь и электронную вычислительную машину. 2 с.п. ф-лы, 3 ил.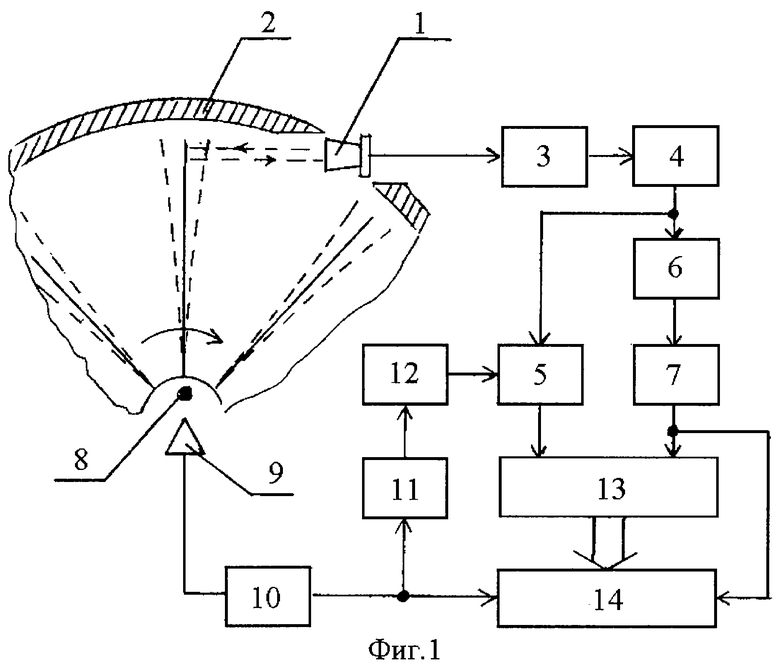
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АМПЛИТУДЫ КОЛЕБАНИЙ ЛОПАТОК ТУРБИН И КОМПРЕССОРОВ | 1992 |
|
RU2112934C1 |
| УСТРОЙСТВО ДЛЯ ЗАМЕРА АМПЛИТУД КОЛЕБАНИЙ БАНДАЖИРОВАННЫХ ЛОПАТОК ТУРБИНЫ ДИСКРЕТНО-ФАЗОВЫМ МЕТОДОМ | 1996 |
|
RU2143103C1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| US 4934192, 19.06.1990. | |||

