Изобретение относится к области гравиметрии, в частности к стендам для испытаний морской гравиметрической аппаратуры.
Инструкцией по эксплуатации морских гравиметров предписывается на заключительном этапе подготовки гравиметрической аппаратуры к работам проводить морские измерения на гравиметрическом полигоне, где выполнены донные гравиметрические исследования, с целью определения погрешности измерений. Помимо того, что проведение таких работ требует значительных финансовых затрат, в ряде случаев выполнить их не представляется возможным из-за малого числа таких гравиметрических полигонов. Поэтому такие работы заменяются лабораторными исследованиями.
В этом случае динамические погрешности, связанные с качкой судна, определяют с помощью горизонтальных, орбитальных или комбинированных динамических стендов, имитирующих воздействие на гравиметрическую аппаратуру возмущающих ускорений. Инерциальные же погрешности, связанные непосредственно с изменением силы тяжести и обусловленные инерционностью морских гравиметров (запаздывание), а также случайные погрешности определения цены деления и постоянной времени гравиметров и качеством настройки регистрирующего оптико-электронно-механического блока гравиметра, как правило, не определяются из-за отсутствия доступного устройства.
Известна схема устройства для эталонирования гравиметров, состоящая из основания, на котором устанавливают гравиметр, и механизма для наклона основания, (а.с. N 190596, опубл. 29.12.96.).По совместным записям наклонов основания и чувствительного элемента гравиметра определяют амплитудные и фазовые характеристики испытываемого гравиметра. Однако большая сложность изготовления такого устройства не позволяет использовать его на практике.
Известен стенд для динамических испытаний гравиметрической аппаратуры (а. с. N 444149, G 01 V 13/00, опубл. 25.09.74, БИ. N 35), включающий в себя подвижные опорную и установочную плиты и приводной механизм. Испытываемый гравиметр помещают на установочную плиту, которая одним концом опирается на ножевую призму, а другим - на эксцентрик, соединенный с приводным механизмом (редуктор с шаговым двигателем). По показаниям гравиметра при горизонтальном перемещении стенда и без него судят о величине воздействия горизонтальных движений на моделируемую аномалию силы тяжести. Стенд позволяет моделировать аномалии силы тяжести, однако он не дает возможности регистрировать и контролировать амплитуду и форму моделируемой аномалии, что в свою очередь не позволяет исследовать амплитудные и фазовые характеристики морских гравиметров.
Задача изобретения состоит в увеличении точности моделирования аномалий силы тяжести и расширении амплитуд и форм моделируемых аномалий.
Указанный технический результат при осуществлении изобретения достигается за счет того, что в устройстве, включающем опорную и установочные плиты и приводной механизм, опорная плита выполнена неподвижной в виде основания с двумя возвышающимися колонками, являющимися опорой для установочной плиты, расположенной между колонками и представляющей собой поворотную раму, имеющую возможность азимутального перемещения; на одной из колонок установлено угломерное устройство, а на другой расположен наводящий микрометрический винт, связанный с поворотной рамой, приводным механизмом и контрольным потенциометром, соединенным с записывающим устройством.
При исследовании отличительных признаков описываемого устройства не найдено каких-либо аналогичных известных решений, позволяющих при морских гравиметрических измерениях увеличить детальность исследований и повысить точность и достоверность гравиметрических работ. За счет осуществления возможности непрерывного наклона исследуемого гравиметра с необходимой скоростью и одновременного измерения угла наклона гравиметра в каждый момент времени при непрерывном контроле процесса наклона от начала до конца с использованием потенциометра, заявляемое устройство позволяет учесть погрешности, связанные непосредственно с изменением силы тяжести и обусловленные инерционностью морских гравиметров, и погрешности, обусловленные точностью определения цены деления и постоянной времени гравиметра и качеством настройки гравиметров, так как дает возможность определить частотные характеристики гравиметров и проводить предрейсовые испытания гравиметров.
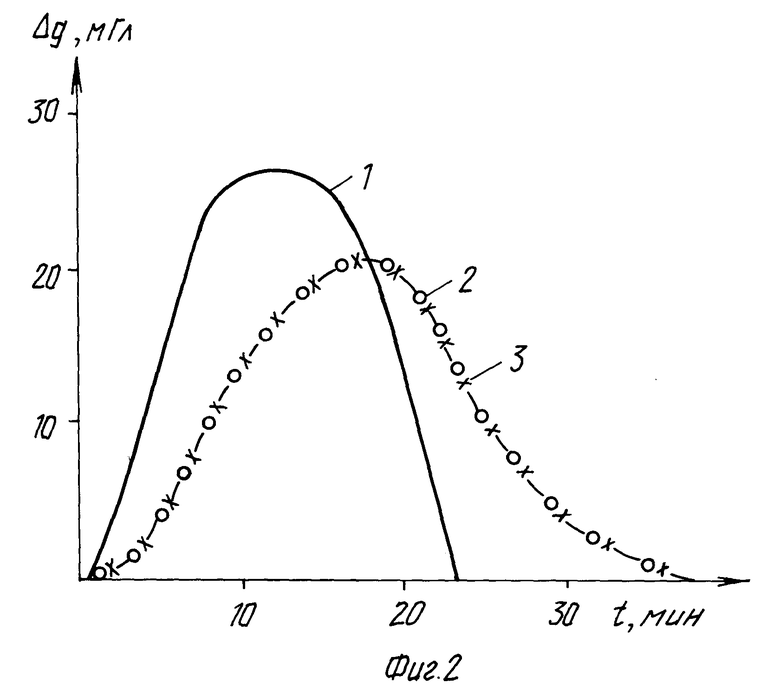
На фиг. 1 представлен чертеж описываемого устройства, содержащего основание 1 с возвышающимися колонками 2 и 3, которые являются опорой для поворотной рамы 4 с двумя полуосями, на которые надеты подшипники (на фиг. 1 не показаны), что обеспечивает азимутальный наклон. В колонке 2 расположено угломерное устройство 5, а на колонке 3 расположен наводящий микрометрический винт 6, соединенный с контрольным потенциометром 7 и через переменный редуктор 8 с реверсивным электродвигателем 9. На наводящем микрометрическом винте 6 укреплена шестерня (не показана), которая входит в зацепление с шестерней (не показана) переменного редуктора 8 и шестерней (не показана), укрепленной на оси контрольного потенциометра 7. Вращение реверсивного электродвигателя 9 передается через переменный редуктор 8 на наводящий микрометрический винт 6. Вращение последнего передается на контрольный потенциометр 7 и приводит к поступательному перемещению микрометрического винта 6 относительно основания 1. Своим концом микрометрический винт давит на поворотную раму 4, наклоняя ее. Величина наклона контролируется визуально с помощью угломерного устройства 5 с точностью 0.5" и/или по записи показаний контрольного потенциометра на записывающем устройстве (не изображен) (например, на самописце) с точностью 0.1 мГал.
Меняя передаточное отношение переменного редуктора или величину электропитания двигателя, изменяют период моделируемой аномалии. Меняя полярность электропитания двигателя, можно выполнять наклоны в прямом и обратом направлениях.
Устройство работает следующим образом. Гравиметр помещают в поворотную раму 4 и устанавливают его по уровням строго горизонтально. Закрепив гравиметр, включают электропитание двигателя и наклоняют гравиметр в прямом направлении на угол, соответствующий амплитуде моделируемой аномалии, которая рассчитывается по таблицам зависимости фиктивного изменения силы тяжести от угла наклона гравиметра или по формуле
gr = -g(l-Cosϕ),
где gr - эффективное значение ускорения силы тяжести; g - ускорение силы тяжести в месте наблюдения; ϕ - угол наклона.
Затем меняют полярность электропитания двигателя и, включив его, проводят наклон гравиметра из положения выше горизонта в положение ниже горизонта через положение горизонта, при этом моделируется аномалия, изменяющаяся по гармоническому закону. Углы наклонов выше и ниже горизонта равны и контролируются визуально по угломерному устройству. Показания гравиметра регистрируются на записывающем устройстве вместе с показаниями контрольного потенциометра. Затем меняется передаточное отношение редуктора и полярность электропитания двигателя и проводится наклон в обратном направлении, при этом моделируется аномалия такой же амплитуды, но с другим периодом. Повторив вышеописанные операции необходимое количество раз, снимают показания контрольного потенциометра, по которым строят временные графики моделированных аномалий, и показания гравиметра, по которым строят временные графики зарегистрированных аномалий. Совместив эти графики по времени, определяют величины амплитудных и фазовых искажений и строят графики амплитудно-частотной и фазочастотной характеристик гравиметра, которые используются при проведении морских гравиметрических измерений.
Известна установка УЭГПЭ-1 (устройство эталонирования гравиметров), содержащая ряд отличительных признаков заявляемого устройства, а именно, основание с двумя возвышающимися колонками, между которыми установлена поворотная рама, угломерное устройство, установленное на одной из колонок и микрометрический винт, расположенный на другой колонке. Установка предназначена для определения цены деления отсчетных шкал гравиметров, т.е. для определения с максимальной точностью соотношения между приращением силы тяжести и приращением оборотов микрометрического винта. Этот процесс строго дискретен, тогда как моделирование аномалий силы тяжести - это процесс, направленный на изучение искажений амплитуды и фазы, зарегистрированных гравиметром аномалий силы тяжести при непрерывном изменении моделируемой аномалии силы тяжести (Пантелеев В. Л. "Основы морской гравиметрии". - М.: Наука, 1983, С. 243 -246).
Предлагаемое автоматизированное устройство для моделирования аномалий силы тяжести за счет соединения микрометрического винта через переменный редуктор с реверсивным электродвигателем и одновременно с контрольным потенциометром, соединенным с записывающим устройством, позволяет использовать его для моделирования аномалий силы тяжести и значительно повысить точность контроля амплитуды и периода аномалии. И в дальнейшем при морских измерениях учесть инерциальные и случайные погрешности гравиметров.
На фиг 2. представлен пример моделирования аномалии силы тяжести в прямом и обратном направлениях на описываемом автоматизированном устройстве. В качестве редуктора был использован стандартный редуктор от самописца Н- 39, а запасные шестерни от него были укреплены на оси наводящего микрометрического винта установки УЭГПЭ - 1 и оси контрольного многооборотного потенциометра ПТП - 12. Наклон осуществляют с помощью реверсивного электродвигателя постоянного тока ДМП - 20, на который подают электропитание с источника питания Б5 - 47. Исследовался морской гравиметр ГМН - К, показания которого регистрировались на самописце КСП - 4 одновременно с показаниями контрольного потенциометра. На устройстве моделировалась аномалия силы тяжести амплитудой 26 мГал и частотой 4,8 10-3 с-1. Применение контрольного потенциометра позволило с точностью ± 0,1 мГал контролировать амплитуду и с точностью 2 с период аномалии.
По результатам эксперимента был построен совмещенный временной график моделируемой аномалии (1) (фиг. 2) и показаний гравиметра при моделировании в прямом 2 и обратном 3 направлениях. Идентичность показаний гравиметра при моделировании в прямом и обратном направлениях позволяет говорить о точной и надежной работе устройства.
Для проверки достоверности результатов, получаемых при моделировании с использованием предлагаемого устройства, проведено сравнение амплитудных искажений (отношение зарегистрированной амплитуды к истинной амплитуде) аномалий силы тяжести, которые получены разными способами, например морским моделированием (за счет изменения эффекта Этвеша). Например, при частоте аномали 3,48•10-3 с-1 амплитудные искажения (Aр/Aм) при морском моделировании составляют 0,82, а при предлагаемом автоматизированном моделировании 0,83. Aр -амплитуда аномалии, зарегистрированная гравиметром; Aм - амплитуда моделируемой аномалии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИБРОДИАГНОСТИКИ СМАЗОЧНОЙ СПОСОБНОСТИ МАСЕЛ УЗЛОВ МЕХАНИЗМОВ | 1998 |
|
RU2138046C1 |
| СПОСОБ ВИБРОДИАГНОСТИКИ МЕХАНИЗМОВ | 1995 |
|
RU2087889C1 |
| СПОСОБ СНИЖЕНИЯ ЗАБОЛЕВАЕМОСТИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАСТЕНИЙ | 1995 |
|
RU2141761C1 |
| СПОСОБ ВЫРАЩИВАНИЯ КАПУСТЫ | 1993 |
|
RU2060635C1 |
| СПОСОБ СМАЗКИ КАНАЛА СТВОЛА, ЧАСТЕЙ И МЕХАНИЗМОВ ОГНЕСТРЕЛЬНОГО ОРУЖИЯ | 1993 |
|
RU2074349C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ | 2011 |
|
RU2461027C1 |
| ОПТИКО-МЕХАНИЧЕСКИЙ ИЗМЕРИТЕЛЬ ДАВЛЕНИЯ | 1999 |
|
RU2159925C1 |
| СПОСОБ СНИЖЕНИЯ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ | 1995 |
|
RU2084716C1 |
| ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2146354C1 |
| КАНАЛИЗАЦИОННЫЙ ВЫПУСК | 1991 |
|
RU2017905C1 |
Использование: в практике морских гравиметрических измерений для определения инерциальных погрешностей, связанных непосредственно с изменением силы тяжести и обусловленных инерционностью морских гравиметров, а также динамических погрешностей, связанных с качкой судна. Сущность изобретения: устройство содержит неподвижное основание с двумя возвышающимися колонками, между которыми располагается поворотная рама, имеющая возможность азимутального перемещения и соединенная с приводным механизмом с помощью микрометрического винта, присоединенного также через контролирующий потенциометр к записывающему устройству. Технический результат: увеличение точности моделирования аномалий силы тяжести и расширение амплитуд и форм моделируемых аномалий, увеличение детальности исследований и повышение точности и достоверности гравиметрических работ. 2 ил.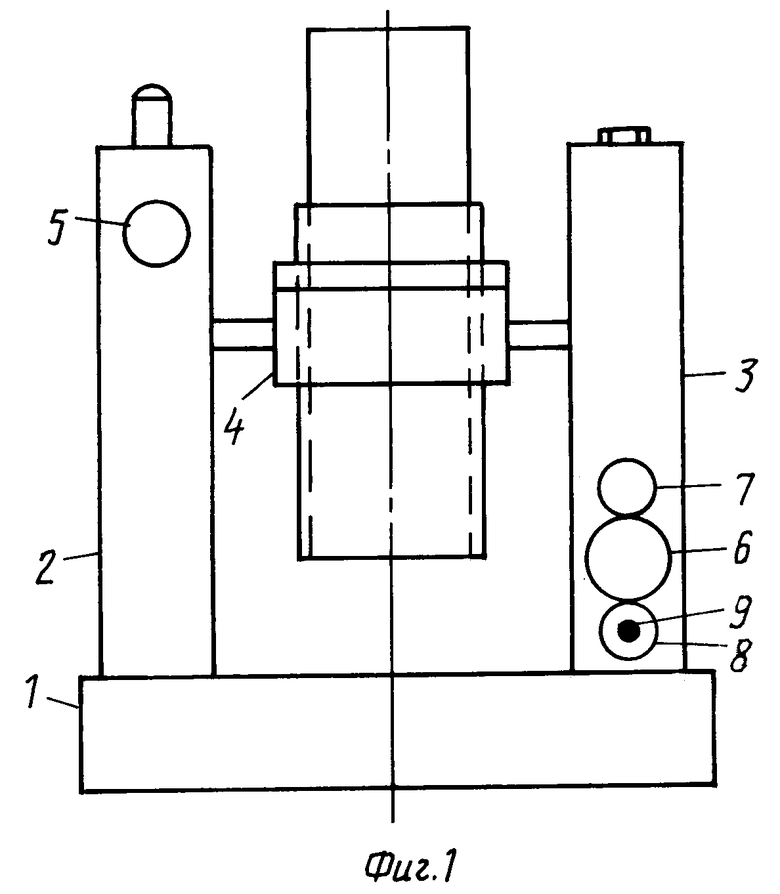
Автоматизированное устройство для моделирования аномалий силы тяжести, содержащее установочную плиту, связанную с приводным механизмом, и опорную плиту, отличающееся тем, что опорная плита выполнена неподвижной в виде основания с двумя возвышающимися колонками, являющимися опорой для установочной плиты, расположенной между колонками и представляющей собой поворотную раму, имеющую возможность азимутального перемещения, на одной из колонок установлено угломерное устройство, а приводной механизм связан с поворотной рамой посредством наводящего микрометрического винта, расположенного на другой колонке и соединенного через контролирующий потенциометр с записывающим устройством.
| Стенд для динамических испытаний гравиметрической аппаратуры | 1971 |
|
SU444149A1 |
| 0 |
|
SU190596A1 | |
| US 4935883 A, 19.06.90. | |||

