Предлагаемый способ и устройство относятся к измерительной технике и могут быть использованы для допускового контроля силы натяжения проводов при намотке дросселей и трансформаторов, изготовлении высокочастотных индуктивностей, обмоток реле и электромагнитных датчиков, а также преобразователей γ - излучения в электрический сигнал для рентгеновских установок сканирующего типа.
Известные способы контроля силы натяжения провода основаны на использовании пружинных или рычажных тензометрических преобразователей силы в электрический сигнал, согласно которым тензопреобразователь включают в мостовую схему и вычисляют силу натяжения по напряжению разбаланса, снимаемого с диагонали электрического моста [1].
Точность контроля такими способами ограничена трудностями измерения сигналов низкого уровня, составляющего единицы - десятки милливольт, в условиях производства из-за влияния промышленных помех и вибрации, характерных для процесса намотки катушек при изготовлении электромагнитных устройств, и температурной нестабильностью сопротивлений тензопреобразователей.
В настоящее время используется способ, основанный на применении струнного магнитоэлектрического преобразователя силы натяжения в частоту, согласно которому контролируемый провод фиксированной длины h и массы m помещают в зазор между магнитными полюсами постоянного магнита и пропускают через этот провод переменный ток возбуждения [2]. Для получения возбуждающего тока провод включают в цепь положительной обратной связи генератора, в котором возникают колебания на резонансной частоте fР, пропорциональной силе натяжения провода FH:
По результатам измерения резонансной частоты колебаний fР рассчитывают силу натяжения провода.
Основными недостатками такого способа являются узкий диапазон контролируемой силы натяжения, необходимость тщательной компенсации активного сопротивления провода и зависимость точности контроля от нестабильности фазовых сдвигов схемы генератора. Кроме того, при измерениях силы натяжения время установления частоты генератора после включения обычно составляет не менее 10 секунд, что замедляет контроль силы натяжения данным способом в производственных условиях.
Устройство для контроля силы натяжения известным способом содержит магнит постоянного тока, между полюсами которого размещают контролируемый провод с двумя токоподводами, через которые подают ток возбуждения от внешнего генератора, а для компенсации активного сопротивления провода RПР используют мостовую схему, в которой регулируют одно из сопротивлений [2].
При контроле силы натяжения тонких проводов с диаметром в десятки микрон, характеризующихся сложной технологией изготовления, и особенно высокоомных проводов из вольфрамовых сплавов, невозможно обеспечить высокую стабильность удельного сопротивления из-за флуктуаций диаметра провода. Это приводит к изменению его активного сопротивления, которое в высокоомных проводах превышает резонансное электрическое сопротивление эквивалентного контура на частоте механических колебаний провода более чем в 100 раз. Нестабильность активного сопротивления провода, в свою очередь, приводит к изменению фазового сдвига в цепи обратной связи струнного генератора, в результате которого меняется частота его колебаний и соответственно искажаются результаты контроля силы натяжения. Кроме того, в процессе намотки происходит изменение контактных сопротивлений между движущимся проводом и неподвижными роликовыми токоподводами, также приводящее к нестабильности частоты генератора и иногда даже к кратковременным пропаданиям генерируемых колебаний, ухудшающим качество контроля. Техническая задача предлагаемого способа - повышение точности контроля, уменьшение длительности цикла контроля и расширение диапазона измерений силы натяжения провода.
Согласно предложенному способу провод помещают в магнитное поле и пропускают через него прямоугольные импульсы тока линейно- изменяющейся частоты, которые в противофазе одновременно подают на резистор, служащий для компенсации активного сопротивления контролируемого провода. Затем суммируют падения напряжений на проводе и компенсирующем резисторе. Полученную сумму напряжений интегрируют и используют для регулирования амплитуды импульсов тока возбуждения, подаваемого на контролируемый провод, чем обеспечивают равенство (по модулю) средних значений напряжений на активном сопротивлении провода и на сопротивлении компенсирующего резистора. При этом мгновенные (или амплитудные) значения указанной суммы напряжений усиливают и сравнивают их с пороговым уровнем напряжения, а силу натяжения провода определяют по средней частоте колебаний усиленной суммы напряжения, амплитуда которых превышает пороговый уровень. Кроме того, постоянную времени интегрирования TИ разности напряжений на контролируемом проводе и компенсирующем резисторе выбирают значительно меньше времени развертки TР и одновременно больше максимального периода развертки линейно-изменяющегося напряжения f(t) по условию TР >> TИ > 1/fmax.
При размещении провода в зазоре между полюсами N и S постоянного магнита, имеющего индукцию B(x), и протекании через провод возбуждающего тока I(t) на провод действует поперечная механическая сила возбуждения FВЗБ = B(x)•I(t) [2, с. 140]. Изменение полярности импульсов возбуждающего тока, либо подача однополярных импульсов тока на провод, натянутый с силой FН, приводят к колебаниям контролируемого провода в зазоре магнита с частотой f(t) тока возбуждения I(t). При этом падение напряжения на проводе:
UПР=I(t)RПР=I(t)(RА+RДИН)
зависит не только от его активного сопротивления RA= 4h•ρ/π•d2, определяемого длиной h, удельным сопротивлением ρ и диаметром d контролируемого провода, но и от динамического сопротивления RДИН, принимающего максимальное значение на резонансной частоте механических колебаний fР и зависящего от первой пространственной гармоники индукции магнита B1 и добротности Q колебательной системы [2, с. 151]:
При типовой добротности магнитоэлектрических колебательных систем Q≥300 [2, с. 140] значение динамического сопротивления контролируемого провода на резонансной частоте составляет RДИН = (0,5 - 5) Ом. Это значительно меньше активного сопротивления RА, которое, к примеру, для проводов из вольфрамовых сплавов диаметром (10-20) мкм составляет RА = 100 Ом, а его изменение от технологического разброса и влияния температуры достигает значений ΔRA = (1 - 10) Ом, т.е. сравнимо и даже превышает динамическое сопротивление RДИН, что делает практически невозможным контроль силы натяжения методом непосредственных измерений.
Для исключения влияния активного сопротивления провода на результаты контроля силы натяжения используется компенсирующий резистор, сопротивление которого выбирают больше максимального значения активного сопротивления провода: RK≥ RA+ΔRA.max. Через данный резистор пропускают импульсы тока IК(t) = -I(t), одинаковые по амплитуде и обратные по полярности импульсам тока возбуждения I(t), подаваемым на контролируемый провод. При суммировании падений напряжения на сопротивлениях провода и компенсирующего резистора формируется напряжение разбаланса
ΔU = UК-UПР= I(t)(RК-RПР) = -I(t)ΔRA,
которое интегрируют с постоянной времени TИ > 1/f(t) и получают компенсирующий ток ΔI из выходного напряжения интегратора UИ, определяемый средним значением напряжения разбаланса ΔUСР и дополнительным (токозадающим) сопротивлением RД:
Компенсирующий ток ΔI подается синхронно с током возбуждения I(t) только на контролируемый провод, и его значение возрастает в процессе интегрирования до тех пор, пока напряжение разбаланса ΔU не станет равным нулю:
ΔU = ΔI•RПР-I(t)•ΔRA= 0.
Интегрирование напряжения разбаланса с использованием выходного напряжения интегратора для регулирования амплитуды импульсов тока возбуждения эквивалентно процессу астатического уравновешивания, позволяющего автоматически исключить влияние разброса активного сопротивления контролируемого провода на результаты контроля его силы натяжения.
При линейном нарастании или убывании частоты f(t) импульсов тока возбуждения по мере приближения к резонансной частоте механических колебаний провода напряжение разбаланса принимает синусоидальную форму. Данный процесс обусловлен влиянием динамического сопротивления провода RДИН и высокой добротностью Q магнитоэлектрической колебательной системы. При этом среднее значение напряжения разбаланса ΔUCP= 0, а амплитуда его синусоидальных колебаний усиливается в KU раз и сравнивается с установленным пороговым уровнем напряжения UПОР. В момент равенства частоты импульсов тока возбуждения резонансной частоте колебаний провода f(t) = fР, амплитуда напряжения разбаланса становится максимальной, после чего она начинает уменьшаться по мере дальнейшего изменения частоты f(t). Соответствующей установкой порогового уровня напряжения UПОР< ΔUmax•KU выделяется переменное напряжение разбаланса в окрестности резонансной частоты fР колебаний провода.
Для измерения среднего значения частоты колебаний, амплитуда которых превышает пороговый уровень, формируют стабильный интервал времени измерений TИЗМ и автоматически считают число импульсов на этом интервале, т. е. получают результат измерения N =fСР•TИЗМ≈fР•TИЗМ. Число импульсов N зависит от силы натяжения провода FН и коэффициента преобразования измерительной системы KПР, поэтому силу натяжения FН = N•KПР определяют по числу импульсов, подсчитанных вблизи частоты резонанса, и на цифровом индикаторе отображают силу натяжения провода непосредственно в размерности весовой величины (в граммах).
При использовании предложенного способа благодаря формированию вынужденных колебаний провода импульсами тока возбуждения с линейной разверткой частоты значительно - более чем на порядок - расширен диапазон контроля силы натяжения. Например, контроль силы натяжения вольфрамового провода диаметром от 13 до 20 мкм предложенным способом проведен в диапазоне от двух до 60 грамм, в то время как при использовании для этой цели схем на основе струнных генераторов, изменение силы натяжения от 30 до 15 г (т.е. в 2 раза) приводило к срыву колебаний.
Достоинством предложенного способа является высокая точность контроля, поскольку на результат преобразования не оказывает влияния нестабильность активного сопротивления провода вследствие его автоматического астатического уравновешивания. При этом одновременно устранено влияние нестабильности источников питания, амплитуды импульсов тока возбуждения и уровня порогового напряжения, поскольку результат преобразования практически не зависит от амплитуды формируемых колебаний, а определяется только их частотой. Кроме того, за счет измерения среднего значения резонансной частоты возможное пропадание одного-двух импульсов, обусловленное, к примеру, кратковременным пропаданием электрического контакта между движущимся проводом и неподвижными роликовыми токоподводами, не оказывает существенного влияния на результаты контроля силы натяжения, которая в данном случае определяется суммарным числом импульсов, подсчитанных за время измерения.
В предложенном способе обеспечено повышение быстродействия, поскольку длительность одного цикла контроля стабильна и определяется интервалом развертки линейно-изменяющейся частоты, составляющим (0,5-1) с, который ограничен практически скоростью считывания информации с цифрового индикатора. В известных способах процесс установления частоты в струнных генераторах составляет не менее 10 секунд [2, с. 156], т. е. в случаях возможного пропадания контакта или нестабильности контактных сопротивлений требуется длительное время для восстановления частоты колебаний, приводящее к снижению производительности контроля силы натяжения.
Устройство для реализации предложенного способа контроля силы натяжения провода должно содержать магнитоэлектрический измерительный преобразователь, компенсирующий резистор и усилитель напряжения разбаланса. Кроме того, в него введены управляемый генератор импульсов, генератор тока, аналоговые сумматор и интегратор, источник опорного напряжения, компаратор, таймер, схема совпадения и генератор напряжения развертки, выход которого через управляемый генератор импульсов подключен к управляющему входу генератора тока, прямой выход которого соединен с первым входом аналогового сумматора и через резистор подключен к одной клемме источника питания. Инверсный выход генератора тока соединен через измерительный преобразователь с другой клеммой источника питания, а также непосредственно соединен со вторым входом аналогового сумматора. При этом выход сумматора через интегратор подключен к регулирующему входу генератора тока и, кроме того, через усилитель соединен с одним входом компаратора, другой вход которого подключен к выходу источника опорного напряжения. Выход компаратора соединен с входом таймера и первым входом схемы совпадения, второй вход которой подключен к выходу таймера. Выход схемы совпадения является выходом данного устройства.
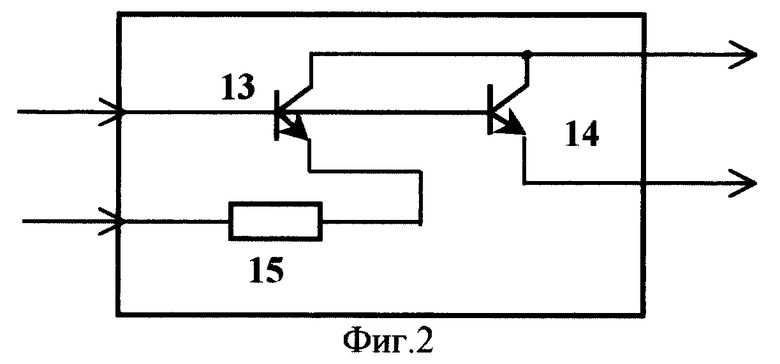
В предложенном устройстве генератор тока собран на двух транзисторах, объединенные базы которых являются управляющим входом, а их объединенные коллекторы - инверсным выходом генератора тока. Эмиттер одного транзистора через дополнительный резистор подключен к регулирующему входу генератора тока, а эмиттер второго транзистора является вторым выходом генератора тока.
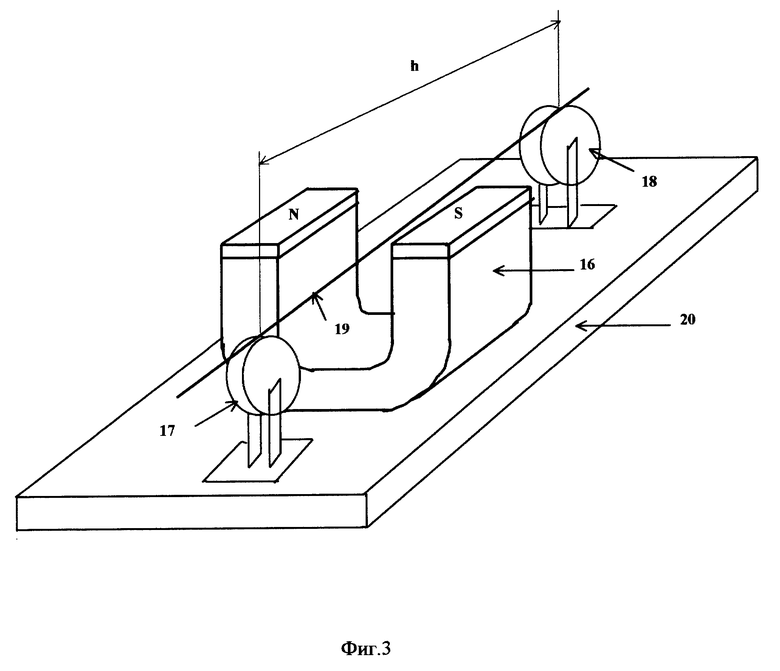
Конструкция измерительного преобразователя содержит два токоподвода на роликовых опорах, установленных на фиксированном расстоянии друг от друга, между которыми закреплен постоянный магнит подковообразной формы с зазором между магнитными полюсами, через которые проходит контролируемый провод.
Положительный эффект достигается за счет применения новых структурных и конструктивных элементов и совокупности новых связей, характеризующих существенные признаки устройства как объекта изобретения.
На фиг. 1 показана функциональная схема устройства, на фиг.2 приведена схема генератора тока, а на фиг. 3 - конструкция измерительного преобразователя. Временные диаграммы работы устройства представлены на фиг. 4.
Устройство содержит генератор напряжения развертки 1, управляемый генератор импульсов 2, генератор тока 3, измерительный преобразователь 4, резистор 5, аналоговый сумматор 6, интегратор 7, усилитель 8, источник опорного напряжения 9, компаратор 10, таймер 11 и схему совпадения 12.
В схеме генератора тока 3, показанной на фиг. 2, применены транзисторы 13, 14 и дополнительный резистор 15.
Измерительный преобразователь 4 (фиг. 3) содержит постоянный магнит 16 с зазором между магнитными полюсами и два токоподвода 17, 18 с роликовыми опорами, предназначенными для поддержания контролируемого провода 19, проходящего в зазоре между полюсами постоянного магнита. Магнит 16 и токосъемники 17, 18 жестко зафиксированы на твердом немагнитном изолирующем основании 20, обеспечивающем фиксированное расстояние h между роликовыми токоподводами 17,18.
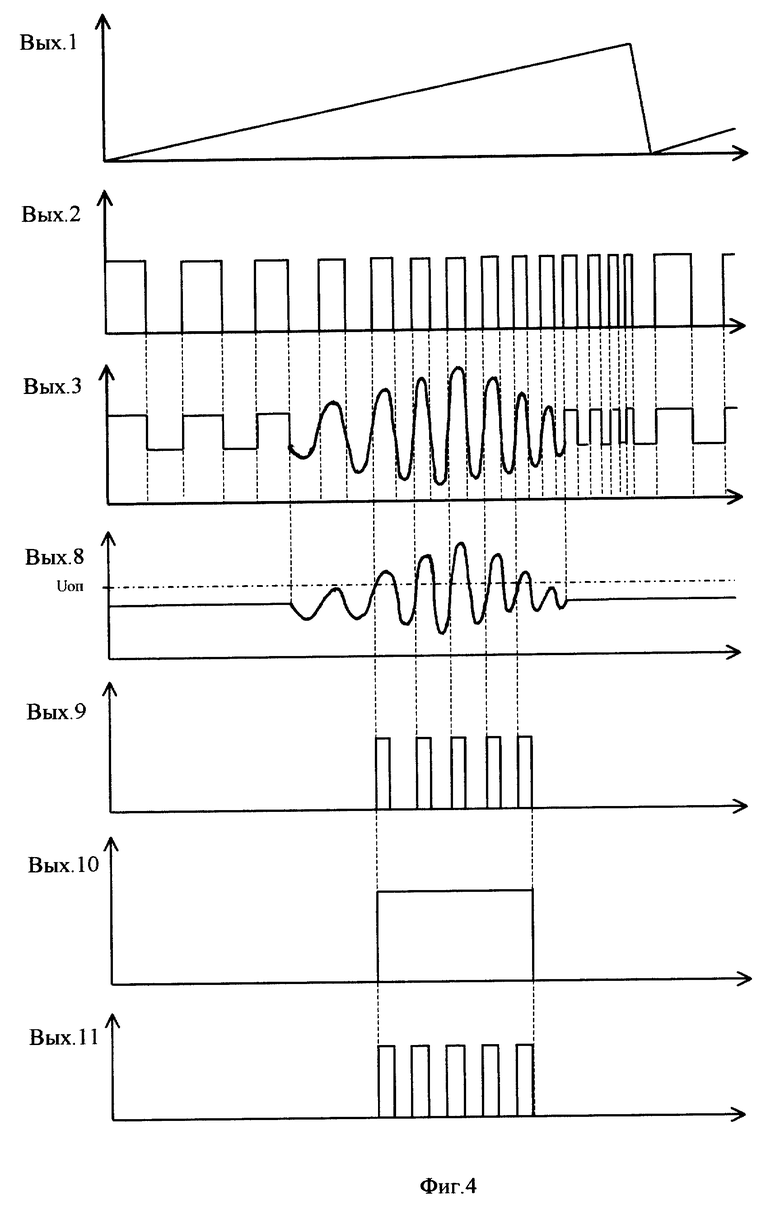
Работа устройства поясняется временными диаграммами, приведенными на фиг. 4, и происходит следующим образом.
Генератор напряжения развертки 1 формирует линейно-нарастающее пилообразное напряжение U1(t) = U0t/T1, под воздействием которого изменяется частота прямоугольных импульсов на выходе управляемого генератора импульсов 2 и соответственно частота импульсов тока на выходе генератора тока 3. При появлении каждого импульса напряжения на управляющем входе генератора тока 3 одновременно открываются его транзисторы 13, 14, и через измерительный преобразователь 4 и резистор 5 протекает импульс возбуждающего тока I(t) с амплитудой IВ и скважностью, равной двум. Резистор 5 применен для компенсации активного сопротивления RА контролируемого провода, и его сопротивление R5 выбирают больше максимального значения сопротивления провода по условию: R5 > RАmax.
Измерительный преобразователь 4 и резистор 5 вторыми зажимами подключены соответственно к разнополярным выходам UП+, UП- источника питания, поэтому при неравенстве сопротивлений RА и R5 на выходе сумматора 6 появляется разностное напряжение U6 = UП+ - IВRА - UП- + IВRА = IВ(R5 - RА). Это напряжение поступает на вход интегратора 7, выполняющего функцию астатического звена уравновешивания, на выходе которого формируется компенсирующее напряжение U7, поступающее через резистор 15 на эмиттер транзистора 13 схемы генератора тока 3 (фиг. 2). Вследствие этого через измерительный преобразователь 4 при открывании транзистора 13 проходят импульсы его коллекторного тока IК13 = U7/R15. В результате такого астатического уравновешивания среднее значение напряжения U6СР на выходе сумматора 6 становится близким к нулю: U6СР = UП+ - UП- + IВRА - (IВ + U7/R15)RА ≈ 0, то есть автоматически компенсируется как изменение активного сопротивления контролируемого провода, так и нестабильность напряжения источника питания.
Частота импульсов на выходе управляемого генератора 2 и соответственно на прямом и инверсном выходах генератора тока 3 непрерывно возрастает на интервале времени развертки напряжения и при ее приближении к резонансной частоте fР механических колебаний контролируемого провода на выходе сумматора 6 формируются колебания синусоидальной формы, обусловленные высокой эквивалентной добротностью механических колебаний системы. Эти колебания усиливаются в K8 раз усилителем 8 и сравниваются с выходным напряжением U9 источника опорного напряжения 9 с помощью компаратора 10. При амплитуде выходного напряжения UМ8 усилителя 8, превышающее опорное напряжение UМ8 > U9, компаратор 10 срабатывает, и на его выходе появляется последовательность прямоугольных импульсов, частота которых близка к резонансной частоте fР механических колебаний контролируемого провода.
В момент появления первого (либо N-го) импульса на выходе компаратора 10 стробируется таймер 11, выходным сигналом которого на время TИЗМ открывается схема совпадения 12, через которую на выход устройства проходят импульсы резонансной частоты, число которых пропорционально контролируемой силе натяжения: N = TИЗМ•fР = KПР•FН.
При дальнейшем нарастании напряжения развертки и соответствующем повышении частоты импульсов возбуждающего тока происходит снижение размаха резонансных механических колебаний, и амплитуда сигнала на выходе усилителя 8 уменьшается. Это приводит к прекращению импульсов на выходе компаратора и окончанию цикла работы устройства, длительность которого определяется периодом развертки линейно-изменяющегося напряжения.
К достоинствам предложенного устройства относится независимость результатов контроля от стабильности питающих напряжений и тока возбуждения (в разумных пределах), поэтому при его реализации можно использовать типовые КМОП логические элементы и простые аналоговые компоненты. Генератор напряжения развертки, интегратор и компаратор можно реализовать на микросхемах типа КР140УД1208, управляемый генератор импульсов и схему совпадения - на микросхеме К561ТЛ1, генератор тока - на транзисторах типа КТ315, сумматор - на сопротивлениях С2-23В, таймер - на микросхеме К1106ВИ1, а для формирования постоянных времени интегрирования и развертки напряжения и таймера использовать RC-компоненты на стандартных резисторах и конденсаторах.
Литература
1. Электрические измерения неэлектрических величин /Туричин А.М., Новицкий П.В. и др.- Л.: Энергия, 1975.- С. 252-264.
2. Новицкий П.В., Кнорринг В.Г., Гутников B.C. Цифровые приборы с частотными датчиками. - Л.: Энергия, 1970.- 424 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХПАРАМЕТРОВЫЙ СПОСОБ КОНТРОЛЯ ИЗДЕЛИЙ | 2006 |
|
RU2305280C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЛАЖНОСТИ | 2009 |
|
RU2399039C1 |
| СПОСОБ ДИЭЛЬКОМЕТРИЧЕСКОГО КОНТРОЛЯ ВЛАЖНОСТИ МАТЕРИАЛОВ | 2010 |
|
RU2416092C1 |
| УСТРОЙСТВО ДВУХПАРАМЕТРОВОГО КОНТРОЛЯ ТОЛЩИНЫ ЭЛЕКТРОПРОВОДНЫХ ПОКРЫТИЙ | 2013 |
|
RU2533756C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КОНТРОЛЯ МЕХАНИЧЕСКОЙ ПРОЧНОСТИ МУФТОВЫХ СОЕДИНЕНИЙ ТРУБ В СКВАЖИНАХ | 2011 |
|
RU2462705C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 1999 |
|
RU2162205C1 |
| ВИХРЕТОКОВЫЙ СПОСОБ ДВУХЧАСТОТНОГО КОНТРОЛЯ ИЗДЕЛИЙ | 2000 |
|
RU2184931C2 |
| Устройство для контроля физико-механических параметров ферромагнитных материалов и изделий | 1989 |
|
SU1739278A2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 1999 |
|
RU2162592C2 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОГО КОНТРОЛЯ МЕХАНИЧЕСКОЙ ПРОЧНОСТИ КРЕПЛЕНИЯ СИДЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2478945C1 |
Изобретения могут быть использованы для допускового контроля силы натяжения проводов при намотке дросселей и трансформаторов, изготовлении высокочастотных индуктивностей, обмоток реле и электромагнитных датчиков, преобразователей γ-излучения в электрический сигнал для рентгеновских установок сканирующего типа. Через размещенный в магнитном поле провод пропускают электрический ток возбуждения, который представляет собой прямоугольные импульсы тока линейно-изменяющейся частоты. Импульсы одновременно подают на компенсирующий резистор, выделяют разность падений напряжения на проводе и компенсирующем резисторе и регулируют амплитуду импульсов тока возбуждения по интегральному значению указанной разности напряжений. Амплитудные значения разности усиливают и сравнивают с пороговым уровнем. Силу натяжения провода определяют по средней частоте колебаний разностного напряжения с амплитудой, превышающей пороговый уровень. Технический результат заключается в повышении точности, уменьшении длительности цикла контроля и расширении диапазона измерений силы натяжения провода. 2 с. и 3 з.п.ф-лы, 4 ил.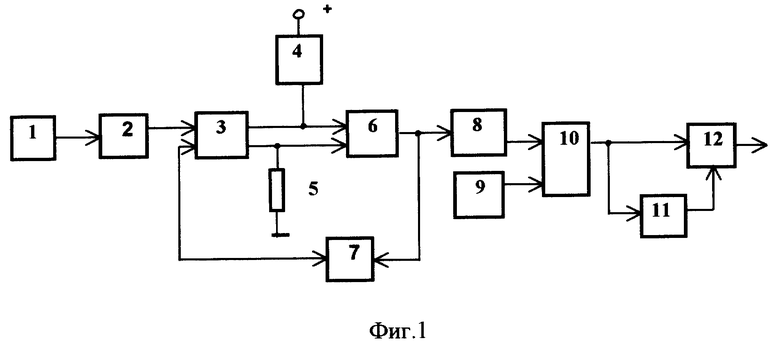
| Новицкий П.В., Кнорринг В.Г., Гутников В.С | |||
| Цифровые приборы с частотными датчиками | |||
| - Л.: Энергия, 1970, с | |||
| Способ приготовления хлебного вина | 1925 |
|
SU424A1 |
| Способ измерения натяжения проводников | 1975 |
|
SU556359A1 |
| Устройство для измерения натяжения проводников | 1976 |
|
SU605128A1 |
| US 4158962 A, 26.06.79 | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Способ толчения стекла | 1940 |
|
SU64216A1 |
