Изобретение предназначено для использования в области исследования материалов вторично-эмиссионными методами. В настоящее время в области исследования вторично-эмиссионных характеристик материалов используются стандартные радиотехнические методы измерения сигналов и, как правило, специальных мер по уменьшению влияния шума не применяют, так как выбирают режимы работы, когда сигнал значительно превышает шум, либо применяют последующую обработку уже измеренных сигналов (усреднение или сглаживание результатов). Первоначально использовались методы непрерывного измерения вторично-эмиссионных параметров, затем получила распространение импульсная методика, так как она значительно снижала влияние нагрева образца и зарядки его первичным потоком частиц, при высоких энергиях снижалось радиационное повреждение исследуемой структуры. [1,2] . Существенным ограничением общепринятых подходов является невозможность удовлетворительно измерить сигналы, уровень которых сравним или меньше уровня шума [З.стр. 30], а при этом теряется часть информации, характеризующая физические эффекты.
В качестве прототипа взят способ измерения, основанный на применении ключевого интегратора [4].
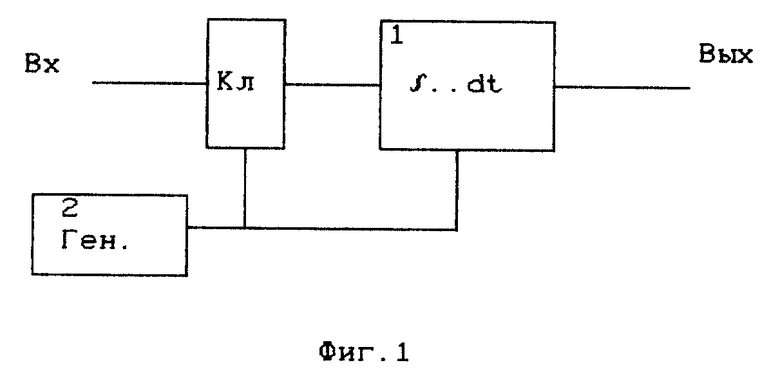
Способ измерения (его реализация представлена на фиг. 1), основанный на использовании ключевого интегратора 1 для измерения сигнала, состоит в том, что входной сигнал вместе с шумом интегрируется по времени только на время длительности импульса, при этом на выходе полезный сигнал возрастает пропорционально длительности интегрирования (т.е. линейно), а шумовая компонента пропорционально квадратному корню от длительности интегрирования. В результате на выходе системы соотношение сигнал/шум возрастает пропорционально корню от длительности интегрирования. Шум предполагается нормальным. В связи со случайным характером в интеграторе шум сглаживается, а полезный сигнал пропорционален площади, которую он ограничивает за время своей длительности. Прямоугольная форма сигнала максимизирует полезный сигнал. Результат измеряется стандартными методами. Генератор 2 управляет первичный импульсом и работой ключа, а также установкой начальных условий интегратора. Недостатком этого способа измерения является его неэффективность при превышении шумом уровня сигнала [5].
Способ-прототип основан на использовании статистических свойств шума и особенностях работы интегратора, связанных с временным наколением сигнала, поступающего на его вход. Предлагаемый способ основан на компенсации шума в двухканальной схеме благодаря использованию зондирующего сигнала определенной формы и определенной временной обработке входного сигнала. В предлагаемом способе используют зондирующий импульс с плоской вершиной, при этом соответствующий вторично-эмиссионный импульс отклика вместе с шумом поступает на вход двухканальной системы, параметры которой изменяются посредством управляющего генератора (он управляет формированием зондирующего импульса, пропусканием сигналов ключевыми устройствами Кл1 и Кл2, а также установкой нулевых условий и работой интегратора).
В первом канале последовательно осуществляют дифференцирование по времени сигнала-отклика и конкретной шумовой реализации, пропускают сигнал через ключевую схему, открывающуюся только в то время, которое соответствует плоской вершине зондирующего импульса, интегрируют по времени продифференцированную смесь сигнала и шумовой реализации с нулевыми начальными условиями за то же время (при этом уходит постоянная составляющая сигнала). Во втором канале пропускают сигнал через ключевую схему, работающую синхронно с ключевой схемой в первом канале. Затем производят вычитание сигнала одного канала из сигнала, поступившего с другого канала (эти сигналы приходят одновременно и имеют одну и ту же длительность, определяемую временем открытого состояния ключевых устройств), и измеряют результат вычитания.
Блок-схема устройства, реализующего предлагаемый способ, представлена на фиг. 2, где 1 - ключевой интегратор, 2 - дифференцирующее устройство, 4 и 5 - ключевые устройства, 6 - вычитающее устройство, 3 - задающий генератор, управляющий работой устройств.
Входной сигнал, представляющий собой смесь полезного сигнала (импульс с плоской вершиной) и шума (конкретная шумовая реализация случайного процесса), поступает на вход двухканальной системы, параметры которой изменяются синхронно с временем прохождения плоской вершины полезного сигнала.
Синхронность обеспечивает генератор 3 (фиг.2), который одновременно управляет формированием зондирующего импульса.
В первом канале входной сигнал поступает на дифференцирующее устройство, которое работает в непрерывном режиме, затем на ключевое устройство 4, пропускающее сигнал только в то время, которое соответствуют плоской вершине зондирующего импульса. Прошедшая смесь поступает на вход интегратора, который начинает работу с нулевыми начальными условиями в момент прихода обрабатываемого сигнала и прекращает работу в момент окончания плоской части зондирующего импульса. Работой интегратора и установкой начальных условий управляет задающий генератор 3. На выходе получается исходная шумовая реализация, которая ограничена по длительности (соответствует открытому состоянию ключевого устройства), полезный сигнал отсутствует.
Во втором канале поступает сигнал на ключевое устройство 5, работающее аналогично ключевому устройству 4. На выход второго канала поступает только та часть входного сигнала, которая соответствует плоской вершине зондирующего импульса (открытому состоянию ключевого устройства).
В вычитающем устройстве 6 вычитается сигнал первого канала из сигнала второго канала. Благодаря одновременному приходу двух сигналов шумовая реализация компенсируется, а амплитуда получившегося прямоугольного сигнала полностью соответствует амплитуде плоской вершины полезного сигнала.
Таким образом, при дифференцировании уходит постоянная составляющая сигнала, а потом при интегрировании восстанавливается только шумовая реализация (за счет выбора формы зондирующего импульса), которая складывается в противофазе с задержанной смесью, тем самым компенсируется реализация шумового процесса и остается чистый вторично-эмиссионный отклик.
По сравнению с прототипом предлагаемый способ измерения позволяет измерять амплитуду вторично-эмиссионного сигнала при условиях, когда нормальный шум сравним или существенно превышает уровень сигнала.
Литература
1. Бронштейн И.М., Фрайман Б.С. Вторично-электронная эмиссия. -М.:Наука, 1969.
2. Шульман А.Р., Фридрихов С.А. Вторично-эмиссионные методы исследования. -М.: Наука, 1977.
3. Куликов Е. И. Вопросы оценок параметров сигналов при наличии понех. -М.: Советское радио, 1969 г.
4. Макаров В.В. Труды ЛПИ. N 311 от 1970 г. стр.211
5. Лезин Ю.С. Оптимальные фильтры и накопители импульсных сигналов. -М.: Советское радио, 1969 г.
Предлагаемый способ измерения предназначен для использования в области исследования материалов вторично-эмиссионными методами. Способ измерения основан на компенсации шумовой составляющей путем выбора соответствующей формы зондирующего импульса - с плоской вершиной. Сущность изобретения заключается в одновременном использовании двух процедур временной обработки, при одной из которых сигнал дифференцируют и затем интегрируют с нулевыми начальными условиями только в то время, которое соответствует плоской вершине зондирующего импульса, а при другой осуществляют пропускание сигнала только в то время, которое соответствует плоской вершине зондирующего импульса. Затем производят вычитание сигнала первого канала из сигнала второго канала. Благодаря одновременному приходу двух сигналов шумовая реализация компенсируется, а амплитуда получившегося сигнала полностью соответствует плоской вершине зондирующего импульса. Предлагаемый способ измерения позволяет измерять амплитуду вторично-эмиссионного сигнала при условиях, когда нормальный шум сравним или существенно превышает уровень сигнала. 2 ил.
Способ измерения амплитуды вторично-эмиссионных стационарных сигналов в условиях сильных шумов, включающий интегрирование сигнала, отличающийся тем, что применяют зондирующий импульс с плоской вершиной, время интегрирования соответствует плоской вершине зондирующего импульса, одновременно используют две процедуры временной обработки, при одной из которых сигнал дифференцируют и затем интегрируют с нулевыми начальными условиями только в то время, которое соответствует плоской вершине зондирующего импульса, а при другой осуществляют пропускание сигнала только в то время, которое соответствует плоской вершине зондирующего импульса, затем производят вычитание сигналов, полученных в этих процедурах, и измеряют результат.
| Макаров В.В | |||
| Устройство для обнаружения слабых импульсных сигналов в присутствии сильных шумов | |||
| - Труды ЛПИ, N 311, 1970, с.211 | |||
| Устройство для измерения отношения сигнал/шум | 1984 |
|
SU1173354A1 |
| ХОДОВАЯ ЧАСТЬ КОЗЛОВОГО КРАНА | 0 |
|
SU379515A1 |
| US 4539477 A, 03.09.1985 | |||
| US 4099054 A, 07.07.1978. | |||
