Изобретение относится к угломерным измерениям, в частности к динамическим измерениям, представляющим собой периодическое измерение угла в определенные моменты времени, и может быть использовано для динамических измерений углов при помощи лазерного гироскопа с переменной подставкой (виброподвесом, зеемановской или фарадеевской подставкой), например, при измерении профиля железнодорожных путей скоростных железных дорог, а также в составе быстродействующих бесплатформенных инерциальных систем.
Известен способ измерения угловых перемещений, в котором в качестве подставки лазерного гироскопа используются крутильные колебания [1]. Способ заключается в том, что из двух аналоговых сигналов, получаемых от лазерного гироскопа и сдвинутых по фазе друг относительно друга на π/2, формируют знаковую функцию и две последовательности счетных импульсов. Последние считают (интегрируют) при помощи реверсивного счетчика, при этом результаты интегрирования снимают в моменты времени, кратные целому числу циклов крутильных колебаний. Недостатком этого способа является то, что он не позволяет проводить динамические измерения.
Известен способ динамического измерения угловых перемещений, при осуществлении которого используется лазерный гироскоп со знакопеременным начальным смещением, а именно с механической знакопеременной подставкой (виброподставкой) [2] . Способ заключается в том, что из двух аналоговых сигналов, сдвинутых по фазе друг относительно друга на π/2 за счет применения двух фотоприемников, разнесенных по координате на четверть длины волны, формируют знаковую функцию и две последовательности счетных импульсов. Последние интегрируют при помощи реверсивного счетчика, причем результаты интегрирования снимают в моменты времени, кратные целому числу циклов знаковой функции.
Этот способ позволяет измерять угловые перемещения с дискретностью (периодичностью), равной периоду функции виброподставки, поэтому для измерения быстроизменяющихся углов он не пригоден.
Наиболее близким к заявляемому является способ динамического измерения угловых перемещений при помощи лазерного гироскопа с переменной подставкой [3] , заключающийся в следующем. Из двух аналоговых сигналов, сдвинутых друг относительно друга на π/2, формируют знаковую функцию и две последовательности счетных импульсов. Последовательности счетных импульсов интегрируют со сдвигом начала интегрирования на время, равное половине периода знаковой функции. При этом периодичность снятия результатов интегрирования выбирают кратной целому числу периодов знаковой функции. Получаемая при этом частота измерений угловых перемещения равна удвоенной частоте переменной подставки.
Задачей, решаемой заявляемым изобретением, является разработка способа, обеспечивающего увеличение частоты отсчетов измеряемых угловых перемещений.
Сущность заявляемого изобретения заключается в следующем. В известном способе динамического измерения угловых перемещений, заключающемся в том, что из двух аналоговых сигналов лазерного гироскопа с переменной подставкой, сдвинутых друг относительно друга на π/2 формируют знаковую функцию и две последовательности счетных импульсов, интегрируют последовательности счетных импульсов со сдвигом начала интегрирования одной последовательности относительно другой на время, равное половине периода знаковой функции и фиксируют результаты интегрирования (значения измеряемого углового перемещения) на интервалах, кратных целому числу периодов знаковой функции, дополнительно формируют функцию переменной подставки в виде периодического сигнала таким образом, что при нулевом значении угловой скорости нуль переходы функции переменной подставки совпадают с нуль-переходами знаковой функции, получают значения Vi,k приращений интеграла путем дополнительного интегрирования последовательностей счетных импульсов на интервалах интегрирования, представляющих собой 2(n-1) временных интервалов, симметричных относительно нуль-переходов функции переменной подставки, длительности которых составляют k/n часть периода функции переменной подставки,
где n - целое число не менее 2; k - индекс временного интервала, изменяющийся от 1 до n, и определяют дополнительные значения Qi,k углового перемещения по следующему соотношению:
Qi,k = Qi,k-1 + Wi,k,
где Wi,k вычисляется по следующему рекурсивному алгоритму:
Wi,k = Vi,k - Vi,k-1 - Wi-1,n-(k-1)
при условии, что Vi,0 = 0; W1,k = 0; Vi,n = Qi - Qi-2,
где Qi - результаты интегрирования за интервалы, кратные целому числу периодов знаковой функции, являющиеся значениями углового перемещения;
i - текущий номер нуль-перехода знаковой функции, являющийся номером цикла измерений;
Vi,k - значения приращений интеграла за k-тый временной интервал в i-ом цикле.
Техническим результатом заявляемого изобретения является получение дополнительных значений измеряемых угловых перемещений, позволяющих увеличить точность слежения за изменением угловых перемещений.
Сущность заявляемого способа поясняется следующими чертежами:
фиг. 1 - временные диаграммы, поясняющие осуществление заявляемого способа, при этом на фиг. 1а приведена функция переменной подставки (виброподвеса) и показано взаимное расположение интервалов интегрирования (временных интервалов) при n = 8, а на фиг. 1b - 1l приведены временные диаграммы сигналов, определяющих интервалы интегрирования;
фиг. 2 - функциональная схема устройства, реализующего способ;
фиг. 3 - функциональная схема блока формирования функции переменной подставки на примере виброподвеса;
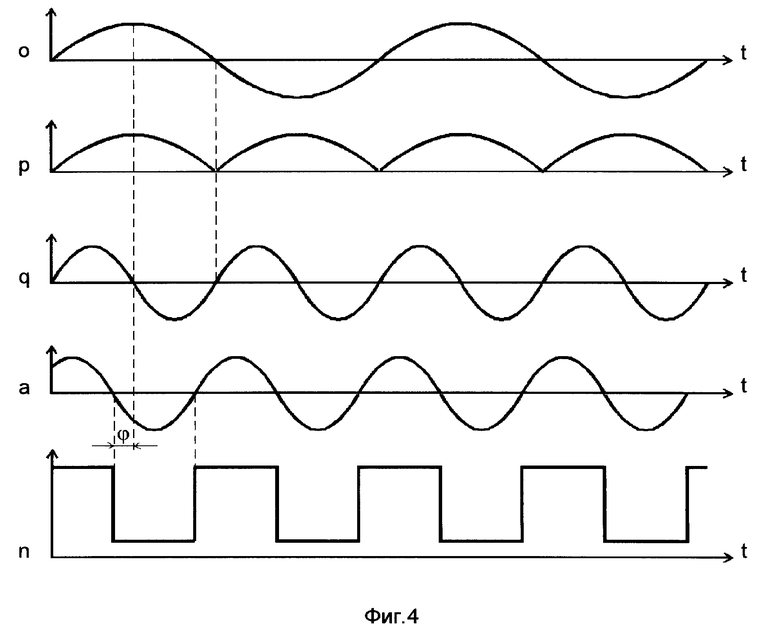
фиг. 4 - временные диаграммы, поясняющие работу блока формирования функции переменной подставки;
фиг. 5 - функциональная схема блока формирования интервалов интегрирования для n = 8.
Заявляемый способ базируется на следующих свойствах определенного интеграла:
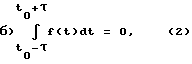
при условии, что f(t0) = 0, а f(t) некоторая периодическая функция
в) 
откуда
Исходя из того, что измеряемое угловое перемещение - Qi пропорционально интегралу от угловой скорости Ω(t) на интервале от момента включения измерительной системы до момента ti, то есть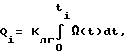
где KЛГ - масштабный коэффициент лазерного гироскопа, а также из того, что два аналоговых сигнала, снимаемых с лазерного гироскопа с переменной подставкой, несут информацию об угловой скорости, можно получить значения измеряемого углового перемещения следующим образом. Из двух аналоговых сигналов, сдвинутых друг относительно друга на π/2, формируют две последовательности счетных импульсов и знаковую функцию, интегрируя последовательности счетных импульсов со сдвигом начала интегрирования одной последовательности относительно другой на время равное половине периода знаковой функции, снимая при этом отсчеты результатов интегрирования на интервалах, кратных целому числу периодов знаковой функции, которые и являются значениями измеряемого углового перемещения Qi, где: i - текущий номер корня (нуль-перехода) знаковой функции.
Для получения дополнительных значений измеряемых угловых перемещений формируют функцию переменной подставки и дополнительно интегрируют последовательности счетных импульсов на 2(n-1) интервалах, формируемых, как показано на фиг. 1b...1l, симметрично относительно нуль-переходов функции переменной подставки. При этом длительности интервалов зависят от периода функции переменной подставки следующим образом:
где k - индекс временного интервала, принимающий значения от 1 до n;
n - любое целое число, не менее 2;
Tk - длительность k-го интервала;
TВП - период функции переменной подставки.
Все сформированные относительно одного нуль-перехода интервалы определяют один цикл измерений.
В результате дополнительного интегрирования получают значения приращений интеграла - Vi,k, которые не зависят от функции переменной подставки, а зависят от характера изменения входной угловой скорости Ω(t), где i - номер нуль-перехода знаковой функции или номер цикла, а Vi,k - приращение интеграла в i-ом цикле за период Tk.
Исходя из свойств определенного интеграла, приведенных выше, и указанного порядка формирования интервалов дополнительного интегрирования, можно получить значения приращений интеграла Wi,k на интервалах, равных 1/2(Tk - Tk-1) следующим образом. Задав условие, что Wi,k = 0; Vi,0 = 0; n = 8 с учетом того, что Vi,8 = Qi - Qi-2, значения Wi,k получают, исходя из следующего рекурсивного алгоритма:
Wi,1 = Vi,1 - Vi,0 - W(i-1),8,
Wi,2 = Vi,2 - Vi,1 - W(i-1),7;
Wi,3 = Vi,3 - Vi,2 - W(i-1),6;
Wi,4 = Vi,4 - Vi,3 - W(i-1),5;
Wi,5 = Vi,5 - Vi,4 - W(i-1),4;
Wi,6 = Vi,6 - Vi,5 - W(i-1),3;
Wi,7 = Vi,7 - Vi,6 - W(i-1),2;
Wi,8 = Vi,8 - Vi,7 - W(i-1),1;
При этом дополнительные значения Qi,k измеряемых угловых перемещений получают, исходя из соотношения:
Qi,k = Qi,k-1 + Wi,k.
Таким образом, заявляемый способ позволяет производить динамические измерения угловых перемещений с частотой, равной 2nfВП, для n = 8 частота равна 16fВП (см. фиг. 1m), где fВП - частота колебаний переменной подставки.
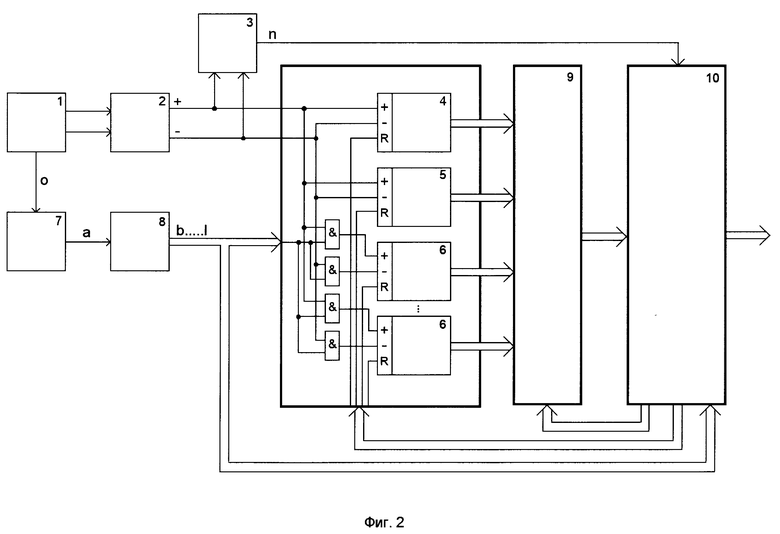
Устройство, реализующее заявляемый способ, представлено на фиг. 2 и состоит из лазерного гироскопа 1 с переменной подставкой (виброподвесом), блока 2 формирования счетных импульсов, блока 3 формирования знаковой функции, основных реверсивных счетчиков 4 и 5, дополнительных реверсивных счетчиков 6, блока 7 формирования функции переменной подставки (виброподвеса), блока 8 формирования интервалов дополнительного интегрирования, мультиплексора 9 и блока 10 обработки.
Дополнительных реверсивных счетчиков 6, в зависимости от схемы включения при n = 8, может быть от восьми до одиннадцати.
Пример выполнения блока 8 формирования интервалов дополнительного интегрирования приведен на фиг. 5. Схема выполнена в предположении непрерывной аналоговой функции виброподвеса для n = 8.
Блок 8 содержит:
удвоители частоты 11, 12;
дифференциатор 13;
компараторы 14, 15, 16;
инверторы 17, 18, 19;
схемы "И" 20, 21, 22;
двухвходовые схемы "И-НЕ" 23, 24, 25, 26, 27;
трехвходовые схемы "И-НЕ" 28, 29.
Удвоители 11 и 12 частоты могут быть выполнены, например, на двухполупериодных выпрямителях и усилителях переменного тока.
Дифференциатор 13 позволяет получить функцию, сдвинутую по фазе на π/2 относительно функции виброподвеса.
Компараторы 14, 15, 16 выделяют корни соответствующих сигналов и формируют временные последовательности типа "меандр" второй и четвертой гармоник, а также первой гармоники функции виброподвеса, сдвинутой по фазе на π/2. Из этих временных последовательностей с помощью логических схем 17 - 29 формируют все интервалы дополнительного интегрирования, временные диаграммы которых представлены на фиг. 1. Диаграммы фиг. 1 (a, b...j) соответствуют входному сигналу a и выходным сигналам b - j блока 8 формирования интервалов интегрирования, схема которого приведена на фиг. 5.
На фиг. 1 рассмотрен случай для n = 8. При этом:
на фиг. 1b показан сигнал управляющий интегрированием на интервале; T1 = TВП/8 = T8/8;
на фиг. 1c показан сигнал, управляющий интегрированием на интервале T2 = 2/8TВП;
на фиг. 1d показан сигнал, управляющий интегрированием на интервале T3 = 3/8TВП;
на фиг. 1e, 1f показан сигнал, управляющий интегрированием на интервале T4 = 4/8TВП;
на фиг. 1g, 1h показан сигнал, управляющий интегрированием на интервале T5 = 5/8TВП;
на фиг. 1i, 1j показан сигнал, управляющий интегрированием на интервале T6 = 6/8TВП;
на фиг. 1k, 1l показан сигнал, управляющий интегрированием на интервале T7 = 7/8TВП.
Интервалы T8 совпадают с периодом функции виброподвеса TВП.
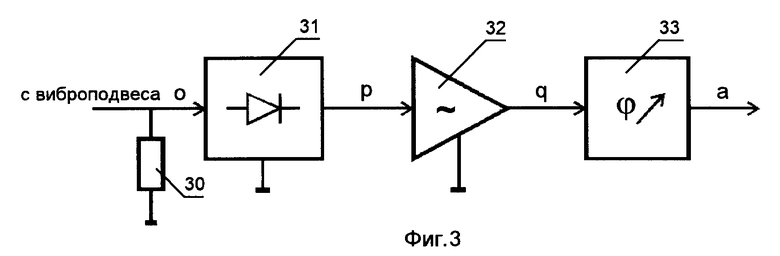
Блок 7 формирования функции переменной подставки, в случае применения виброподвеса, может быть выполнен либо в виде датчика положения резонатора относительно корпуса лазерного гироскопа с виброподвесом, либо, как представлено на фиг. 3, в виде датчика тока виброподвеса, в качестве которого используется резистор 30, удвоителя частоты, состоящего из диодного выпрямителя 31 и операционного усилителя 32, и фазовращателя 33, позволяющего компенсировать электромеханическую задержку виброподвеса. В последнем случае необходима настройка, заключающаяся в совмещении корней функции виброподвеса и знаковой функции при Ω(t) = 0. Работа блока 7 поясняется временными диаграммами на фиг. 4, где на диаграмме (n) показана знаковая функция.
При использовании зеемановской или фарадеевской переменных подставок для формирования функции переменной подставки можно регистрировать ток, образующий переменное магнитное поле.
Мультиплексор 9 (см. фиг. 2) служит для коммутации цифровых выходов реверсивных счетчиков 4, 5, 6 на входную шину блока 10 обработки. Управляется мультиплексор 9 сигналами блока 8 формирования интервалов дополнительного интегрирования.
Блок 10 обработки реализует в реальном времени алгоритм, описанный выражениями (4) и (5), причем отсчеты на выходе блока 10 обработки регистрируются с частотой равной 2nfВП, для n = 8 частота равна 16fВП (см. фиг. 1m), где fВП - частота колебаний переменой подставки.
Устройство (см. фиг. 2) работает следующим образом. Из двух аналоговых сигналов, поступающих с выхода лазерного гироскопа 1 и сдвинутых друг относительно друга на π/2, блок 2 формирует последовательность суммируемых и последовательность вычитаемых импульсов, а блок 3 формирует знаковую функцию. При этом частота счетных импульсов пропорциональна проекции на ось чувствительности суммарного воздействия угловой скорости Ω(t) и угловой скорости виброподвеса ωВП(t) на резонатор лазерного гироскопа, а знаковая функция имеет те же корни, что и у суммарного воздействия, т.е. нуль-переходы суммарного воздействия совпадают с фронтами знаковой функции.
Основные реверсивные счетчики 4 и 5 запускаются со сдвигом относительно друг друга на половину периода знаковой функции и интегрируют счетные импульсы непрерывно. Информация с основных реверсивных счетчиков 4 и 5 (полное значение интеграла) снимается в моменты окончания периодов знаковой функции.
Блок 7 формирует сигнал a (см. фиг. 4) являющийся функцией переменной подставки, таким образом, чтобы при Ω(t) = 0 его нуль-переходы совпадали с фронтами сигнала n (см. фиг. 4), являющийся знаковой функцией.
Блок 8 формирует из функции виброподвеса, поступающей с выхода блока 7, импульсные сигналы b - l (фиг. 5). Эти сигналы управляют работой дополнительных реверсивных счетчиков 6, которые измеряют приращения интеграла за доли периода функции виброподвеса.
По переднему фронту сигналов b - l (см. фиг. 1), поступающих с блока 8, происходит обнуление соответствующих дополнительных реверсивных счетчиков 6, а во время действия единичного уровня этих сигналов на счетные входы счетчиков 6 подаются счетные импульсы с выхода блока 2 формирования счетных импульсов.
Таким образом, на входные шины мультиплексора 9 с выходов основных реверсивных счетчиков 4 и 5 поступают текущие значения полного интеграла Qi, а с выходов дополнительных реверсивных счетчиков 6 - значения приращений интеграла Vi,k.
Блок 10 обработки выполняет следующие операции:
обнуляет все реверсивные счетчики, причем основные 4 и 5 - с сдвигом на половину периода знаковой функции;
управляет мультиплексором 9;
осуществляет считывание значений Qi и Vi,k и запись их в буферную память блока 10 обработки;
вычисляет значения Wi,k по рекурсивному алгоритму (4);
вычисляет значения Qi,k и формирует их на выходе блока 10 - выходной шине устройства.
Источники информации
1. Патент Великобритании N 1296786.
2. Лукьянов Д.П., Филатов Ю.В. Основы квантовой гироскопии: Учеб. пособие/Ленингр. электротехн. ин-т им. В.И. Ульянова (Ленина). - Л., 1987.
3. Руководство по технической эксплуатации к инерциальной системе И-432-1С. Раменский приборостроительный завод. 194100 Моск. обл, г. Раменск, ул. Михайлевича, 39.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОДИРУЮЩИЙ ВРЕМЯИМПУЛЬСНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2141721C1 |
| ЦИФРОВОЙ ТЕРМОМЕТР | 1997 |
|
RU2135965C1 |
| ВРЕМЯИМПУЛЬСНЫЙ КВАДРАТИЧНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2149449C1 |
| УСТРОЙСТВО ДЛЯ ФУНКЦИОНАЛЬНОГО ПРЕОБРАЗОВАНИЯ ШИРОТНО-ИМПУЛЬСНЫХ СИГНАЛОВ | 1992 |
|
RU2041499C1 |
| МНОЖИТЕЛЬНО-ДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 1995 |
|
RU2097829C1 |
| ЦИФРОВОЙ ТЕРМОМЕТР | 1992 |
|
RU2039953C1 |
| УСТРОЙСТВО ДЛЯ АППРОКСИМАЦИИ ФУНКЦИЙ | 1992 |
|
RU2010324C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ АКТИВНОЙ МОЩНОСТИ | 1993 |
|
RU2074397C1 |
| ПРЕОБРАЗОВАТЕЛЬ КОД - АНАЛОГ | 1999 |
|
RU2159506C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ | 1993 |
|
RU2099865C1 |

Способ может быть использован для измерений углов при помощи лазерного гироскопа с переменной подставкой, например, при измерении профиля железнодорожных путей скоростных железных дорог, а также в составе быстродействующих бесплатформенных инерциальных систем. Из двух аналоговых сигналов, снимаемых с лазерного гироскопа с переменной подставкой и сдвинутых друг относительно друга на π/2, формируют знаковую функцию и две последовательности счетных импульсов. Последние интегрируют со сдвигом начала интегрирования на время, равное половине периода знаковой функции, и по результатам интегрирования судят о значениях измеряемого углового перемещения на интервалах, кратных целому числу периода знаковой функции. Формируют функцию переменной подставки и дополнительно интегрируют последовательности счетных импульсов на 2(n-1) временных интервалах, формируемых симметрично относительно нуль-переходов функции переменной подставки. При этом длительности интервалов определенным образом зависят от периода функции переменной подставки. В результате дополнительного интегрирования получают значения приращений интеграла, которые не зависят от функции переменной подставки, а зависят от характера изменения входной угловой скорости, что позволяет с помощью определенного рекурсивного алгоритма получать дополнительные значения измеряемых угловых перемещений. Способ позволяет производить динамические измерения угловых перемещений с частотой, в 2n раза превышающей частоту колебаний переменной подставки, и тем самым увеличить точность слежения за изменением угловых перемещений. 5 ил.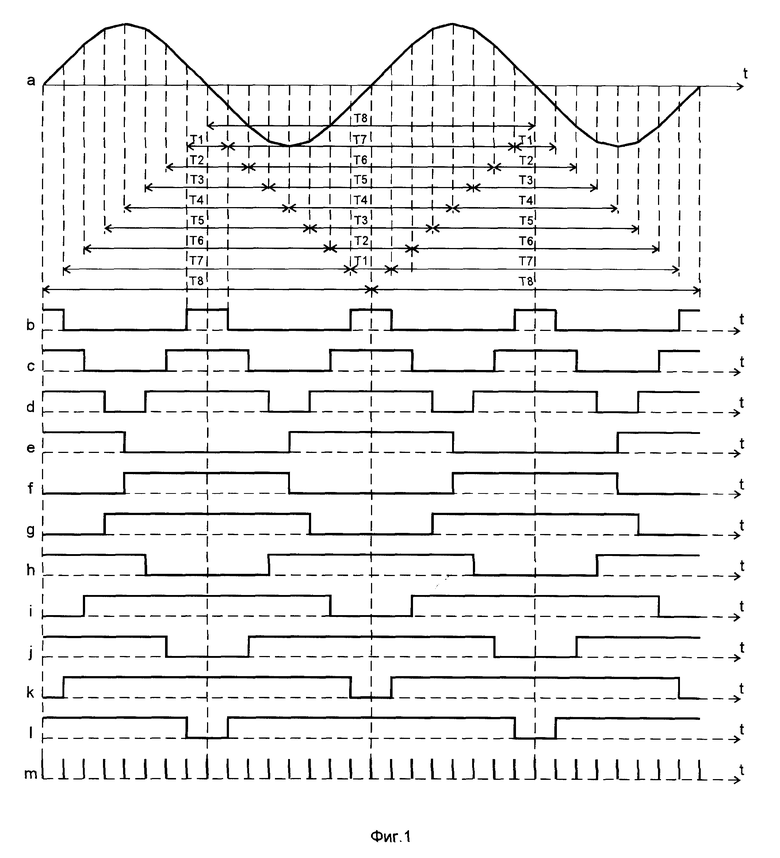
Способ динамического измерения угловых перемещений, заключающийся в том, что из двух аналоговых сигналов лазерного гироскопа с переменной подставкой, сдвинутых друг относительно друга на π/2, формируют знаковую функцию и две последовательности счетных импульсов, интегрируют последовательности счетных импульсов со сдвигом начала интегрирования одной последовательности относительно другой на время, равное половине периода знаковой функции, и фиксируют результаты интегрирования, являющиеся значениями измеряемого углового перемещения, за интервалы, кратные целому числу периодов знаковой функции, отличающийся тем, что дополнительно формируют функцию переменной подставки в виде периодического сигнала таким образом, что при нулевом значении угловой скорости нуль-переходы функции переменной подставки совпадают с нуль-переходами знаковой функции, получают значения Vi,k приращений интеграла путем дополнительного интегрирования последовательностей счетных импульсов на интервалах интегрирования, представляющих собой 2(n-1) временных интервалов, симметричных относительно нуль-переходов функции переменной подставки, длительности которых составляют k/n часть периода функции переменной подставки, где n - целое число, не менее 2, k - индекс временного интервала, изменяющийся от 1 до n, и определяет дополнительные значения Qi,k углового перемещения по следующему соотношению:
Qi,k = Qi,k-1 + Wi,k,
где Wi,k вычисляется по следующему рекурсивному алгоритму:
Wi,k = Vi,k - Vi,k-1 - Wi-1,n- (k-1),
при условии, что Vi,o = 0; Wi,k = 0; Vi,n = Qi - Qi-2,
где Qi - результаты интегрирования за интервалы, кратные целому числу периодов знаковой функции, являющиеся значениями углового перемещения;
i - текущий номер нуль-перехода знаковой функции, являющийся номером цикла измерений;
Vi,k - значения приращений интеграла за k-тый временной интервал в i-ом цикле.
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| МАССА ДЛЯ ФОРМОВАНИЯ ОСНОВНЫХ ОГНЕУПОРОВ И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 1998 |
|
RU2136630C1 |
| ИНТЕРПОЛЯТОР СТОЯЧИХ ВОЛН | 1991 |
|
RU2076305C1 |
| DE 3837380 A1, 15.05.97 | |||
| US 4678335 A, 07.07.87. | |||
