Настоящее изобретение относится к гидравлическому рулевому механизму, содержащему корпус, в котором с возможностью вращения друг относительно друга установлены внутренний регулирующий подвижный орган и внешний регулирующий подвижный орган, вместе установленные как средства формирования изменяемого проточного канала между подводящими соединительными средствами и рабочими соединительными средствами.
Такой рулевой механизм описан, например в патенте Германии N 4342933 Al.
В рулевых механизмах этого типа подводящие соединительные средства в основном содержат нагнетательный патрубок и сливной патрубок, а рабочие соединительные средства - два рабочих патрубка. Присоединенный к механизму двигатель рулевого управления перемещается в том или ином направлении в зависимости от того, какой из рабочих патрубков подвергается воздействию давления.
В большинстве случаев внутренний регулирующий подвижный орган перемещают посредством рулевого колеса, то есть этот подвижный орган поворачивают по отношению к внешнему регулирующему подвижному органу. В этом случае проточный канал между нагнетательным патрубком и соответствующим рабочим патрубком, а также между другим рабочим патрубком и сливным патрубком разблокируется при меньшем или большем дросселировании. Следовательно, рабочая жидкость снова посредством двигателя рулевого управления течет от насоса к резервуару. В то же время рабочая жидкость приводит в действие измерительный двигатель, который поворачивает внешний регулирующий подвижный орган по отношению к внутреннему регулирующему подвижному органу, и таким образом оба регулирующих подвижных органа снова выставляются в первоначальное выставленное положение, при их нахождении в котором проточный канал закрыт.
В некоторых случаях возникает необходимость в управлении транспортным средством, снабженным таким рулевым механизмом, не только с места водителя с использованием рулевого колеса, но, например, из нескольких мест в случае самоходных рабочих машин.
До настоящего времени это достигалось просто путем установки на валу рулевого колеса приводного двигателя, который при соответствующем приведении в действие выполняет функцию человеческой руки в качестве средств привода этого вала. Однако в этом случае необходимо дополнительное пространство для установки приводного двигателя.
Настоящее изобретение основано на проблеме создания приспособления для дистанционного регулирования, предназначенного для рулевого механизма и имеющего простую конструкцию.
В гидравлическом рулевом механизме указанного во вступительной части типа эта проблема решается тем, что каждый регулирующий подвижный орган присоединен к ведущему подвижному органу, и между двумя ведущими подвижными органами образована по меньшей мере одна камера повышенного давления, которая подвергается воздействию текучей среды под давлением и изменение объема которой вызывает относительное смещение двух регулирующих подвижных органов.
Следовательно, можно отказаться от обычного места установки дистанционного рулевого механизма, а именно на валу рулевого колеса. Дистанционным управлением в этом случае воздействуют непосредственно на два регулирующих подвижных органа и могут, следовательно, вызвать их относительное смещение. При этом только под воздействием нагрузки давления и расширения в результате этого камеры повышенного давления, образованной между двумя ведущими подвижными органами, создается соответствующий крутящий момент, так что можно отказаться от дополнительных внешних двигателей. Непосредственное вмешательство в кинематику двух регулирующих подвижных органов не только обеспечивает возможность вращения внутреннего регулирующего подвижного органа по отношению к корпусу, как это было ранее, когда за ним вынужден был следовать внешний регулирующий подвижный орган (в случае, когда приводится в движение внешний регулирующий подвижный орган, за ним вынужден следовать внутренний регулирующий подвижный орган). Кроме того, относительное смещение в корпусе двух регулирующих подвижных органов может быть вызвано непосредственно, так что в некоторых случаях можно полностью избежать перемещения рулевого колеса, сопровождающегося возникновением опасности для обслуживающего персонала. Более того, при таком виде дистанционного регулирования могут быть выбраны другие принципы управления. Например, можно отказаться от измерительного двигателя. При подаче других соответствующих сигналов управления ведущие подвижные органы могут таким же образом вызвать возврат двух регулирующих подвижный органов в их начальное положение.
В этом случае особенно предпочтительным является выполнение по меньшей мере одного регулирующего подвижного органа за одно целое с соединенным с ним ведущим подвижным органом, что упрощает конструкцию. Кроме того, выполнение ведущего и регулирующего подвижных органов за одно целое не требует каких-либо дополнительных крепежных элементов.
Предпочтительная конструкция выполнена так, что два ведущих подвижных органа расположены концентрично по отношению друг к другу, а камера повышенного давления расположена в кольцевом зазоре между этими двумя ведущими подвижными органами, каждый из которых имеет выступ, выдающийся в этот кольцевой зазор, упирающийся в другой ведущий подвижный орган и ограничивающий камеру повышенного давления в окружном направлении. В такой конструкции увеличение объема, получаемое, например, при поступлении текучей среды под давлением в камеру повышенного давления, непосредственно вызывает крутящий момент и, таким образом, вращение двух подвижных органов друг относительно друга. В этом случае нет необходимости в применении каких-либо дополнительных мер. Размер выступов, а именно расстояние, на которое они выступают в радиальном и осевом направлениях, задает поверхность приложения допустимого давления, которая в свою очередь вместе с давлением в камере повышенного давления определяет создаваемый крутящий момент. Даже при наличии относительно небольшого кольцевого зазора может быть создан крутящий момент, необходимый для смещения двух регулирующих подвижных органов друг относительно друга.
Также предпочтительно, чтобы выступы были закруглены по своему свободному краю. Этим краем является край выступов, которым они прилегают к соответствующему другому ведущему подвижному органу. При таком закруглении снижается износ и в некоторой степени улучшаются условия, необходимые для герметизации.
Предпочтительным является то, что каждый выступ служит границей для двух камер повышенного давления. Возможность приведения в действие рулевого механизма в обоих направлениях улучшается при наличии двух камер повышенного давления. В этом случае упрощено приложение возвратных усилий.
Предпочтительным является и то, что рулевой механизм имеет более двух камер повышенного давления. Количество выступов и, таким образом, количество поверхностей, к которым может быть приложено давление, также соответственно увеличено. Таким образом, без особых трудностей может быть увеличен крутящий момент. С точки зрения необходимого пространства в большинстве случаев возможно также размещение более двух камер повышенного давления, поскольку относительное смещение двух регулирующих подвижных органов составляет главным образом в среднем менее 20o, и нет необходимости в значительно большем размере камер повышенного давления, чем в данном случае.
Предпочтительно также то, что рулевой механизм имеет четное количество камер повышенного давления. В этом случае воздействие ведущих подвижных органов может быть одинаковым в обоих направлениях управления.
Преимуществом является то, что текучая среда под давлением поступает из того же источника давления, что и рабочая жидкость, используемая для рулевого механизма. Следовательно, нет необходимости в дополнительном источнике давления. В любом случае рабочая жидкость в целом поступает под необходимым давлением. Поскольку для приведения в движение ведущих подвижных органов используется лишь сравнительно небольшое количество рабочей жидкости, то таким образом может быть достигнута экономичная работа.
Преимуществом является то, что между каждой камерой повышенного давления и источником давления расположено регулирующее устройство. В отдельной камере повышенного давления может быть по желанию установлено специальное значение давления, так что могут быть получены возникающие при этом необходимое относительное вращение двух ведущих подвижных органов и необходимое относительное вращение двух регулирующих подвижных органов.
Регулирующее устройство предпочтительно содержит электромагнитные клапаны с импульсным регулированием. С использованием таких клапанов необходимое давление может быть установлено с относительно меньшими проблемами с применением коэффициента импульсного цикла. Этот коэффициент является отношением времени открытия электромагнитного клапана и времени всего цикла, то есть суммы времени открытия и времени закрытия.
Преимуществом является также и то, что камеры повышенного давления разделены на две группы, для каждой из которых имеются электромагнитный клапан и дроссель, соединенные последовательно, и каждая из которых присоединена к точке ответвления между электромагнитным клапаном и дросселем. Поскольку камеры повышенного давления одинаково скомбинированы с образованием группы камер повышенного давления, то в каждой камере группы давление одинаково, так что приложение крутящего момента в окружном направлении практически одинаково. Использование одного электромагнитного клапана с дросселем для одной группы обеспечивает создание относительно простой системы регулирования.
Камеры повышенного давления совместно с дросселями предпочтительно выполнены в виде демпфирующего приспособления. Таким образом, достигнуто демпфирование между двумя подвижными органами. В этом случае можно достаточно просто предотвратить любую тенденцию к колебаниям. Это является существенным преимуществом, в особенности в транспортных средствах с центральным поворотным управлением.
Преимуществом является также и то, что общее соединение дросселей присоединено к воспринимающей нагрузку регулирующей линии. Таким образом перепад давления в электромагнитных клапанах и дросселях всегда может поддерживаться постоянным, что облегчает, например электронный запуск электромагнитных клапанов.
Ниже изобретение описано со ссылкой на предпочтительный вариант выполнения в сочетании с чертежами, на которых:
фиг.1 изображает схематичный продольный разрез рулевого механизма,
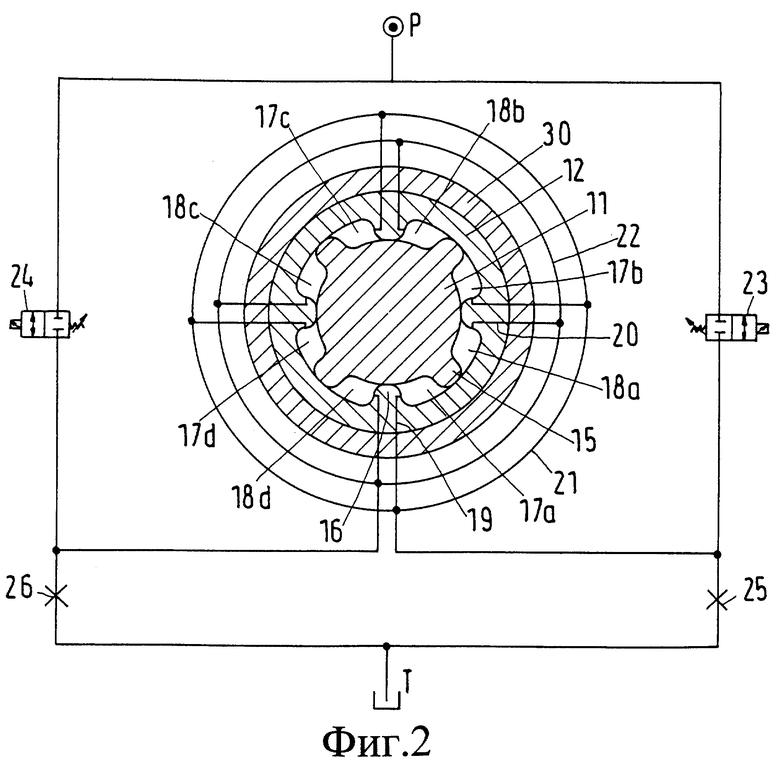
фиг. 2 изображает схематичный разрез по линии 11-11 на фиг. 1.
На фиг.1 схематично показан рулевой механизм 101, содержащий корпус 30 с выполненным в нем корпусным отверстием 31, в котором с возможностью вращения установлены внешний регулирующий подвижный орган 32 и расположенный в нем внутренний регулирующий подвижный орган 33. Шарнирно установленный вал 34 присоединяет измерительный двигатель 116 к органу 32. Орган 33 расположен с возможностью присоединения посредством муфты 35 к валу рулевого колеса, который на чертеже не показан. В представленном случае муфта выполнена в виде многошлицевого вала, в который может быть вставлен вал рулевого колеса.
Органы 32 и 33 присоединены друг к другу посредством пластинчатых пружин 36, обеспечивающих возможность поворота этих подвижных органов друг относительно друга в ограниченных пределах.
Двигатель 116 выполнен в виде шестеренного двигателя, который имеет кольцо 37 с внешним зубчатым венцом и внутреннее зубчатое колесо 38, между которыми расположены вытеснительные камеры 39; весь узел закрыт крышкой 40. Два органа 32 и 33 образуют средства 41 формирования проточного канала.
Средства 41 селективно соединяют различные патрубки и сами соединены с различными дроссельными устройствами. Для этого выполнены кольцевая канавка 42, соединенная со сливным патрубком Т, кольцевая канавка 43, соединенная с левым рабочим патрубком L, кольцевая канавка 44, соединенная с правым рабочим патрубком R, ряд регулирующих отверстий 45, соединенных посредством осевых каналов 46 с соответствующими камерами 39, кольцевая канавка 47, соединенная с нагнетательным патрубком P, и кольцевая канавка 48, соединенная с патрубком LS для сигнала управления.
Кроме того, в регулирующем механизме выполнены несколько осевых каналов, например каналы 49, и несколько регулирующих отверстий, например отверстия 50. Вместе они образуют средства формирования проточного канала между подводящими соединительными средствами, в данном случае образованными патрубками P и T, и рабочими соединительными средствами, здесь образованными патрубками L и R.
Конструкция и способ работы такого рулевого механизма по сути известны. Когда орган 33 поворачивают относительно органа 32 посредством вала рулевого колеса, то в зависимости от направления поворота проточный канал выходит из патрубка P в один из рабочих патрубков L, R. Другой проточный канал выходит соответственно из другого рабочего патрубка R, L в патрубок T. В то же самое время рабочая жидкость воздействует на двигатель 116. Колесо 38 при этом вращается в соответствии с количеством поданной рабочей жидкости и протягивает орган 32 по органу 33 до тех пор, пока они снова не займут нейтральное положение и отдельные проточные каналы не будут снова перекрыты.
В дополнение к тому, что сделано в механизме 101 для приведения в действие органа 33 посредством вала рулевого колеса через муфту 35, также предусмотрены некоторые предложения для дистанционного регулирования. Для этого в зоне конца двух органов 32, 33, в которой также установлена муфта 35, расположено приводное устройство 10.
Устройство 10, разрез которого схематично показан на фиг.2, содержит внутренний ведущий подвижный орган 11 и внешний ведущий подвижный орган 12, которые концентрично установлены в отверстии 31 корпуса 30. Таким образом возможно вращение двух органов 11, 12 по отношению друг к другу и по отношению к корпусу 30.
Как показано на фиг. 1, орган 11 выполнен за одно целое с органом 33. Орган 12 также может быть выполнен за одно целое с органом 32, однако в этом частном случае он присоединен к органу 32 посредством соединительного приспособления 13.
Между двумя органами 11, 12 находится кольцевое пространство 14, в поперечном сечении имеющее форму кольца.
Внутренний регулирующий подвижный орган имеет четыре выступа 15, выступающих радиально в наружном направлении, проходящих через пространство 14 и упирающихся в орган 12 или, более точно, в его внутреннюю стенку. Аналогичным образом орган 12 имеет четыре выступа 16, проходящих радиально через пространство 14 и упирающихся в орган 11. Таким образом образовано всего восемь камер 17a, 17b, 17c, 17d, 18a, 18b, 18c, 18d повышенного давления, на каждую из которых может воздействовать давление через линию 18c, 18d давления. В данном случае линии 19 давления для камер 17a, 17b, 17c, 17d объединены в группу кольцевой линией 21. Линии 20 давления для камер 18a, 18b, 18c, 18d объединены в группу кольцевой линией 22.
Для каждой группы имеется регулирующее устройство, содержащее последовательное соединение электромагнитного клапана 23 (для камер 17), 24 (для камер 18) с импульсным регулированием и дросселя 25, 26, при этом камеры 17 соединены с точкой ответвления между клапаном 23 и дросселем 25, а камеры 18 - с точкой от ветвления между клапаном 24 и дросселем 26. Оба канала 23, 25 и 24, 26 расположены параллельно друг другу между патрубками P и T.
В качестве клапанов 23, 24 применены клапаны с импульсным регулированием. Следовательно, в пределах заданного периода они в течение изменяемого времени находятся в открытом положении, а в течение остального времени этого периода - в закрытом положении. Таким образом, может быть установлена средняя степень открытия, задающая дросселирующее сопротивление клапана 23, 24.
В случае, когда дроссели 25, 26 обладают одинаковыми характеристиками, при равномерном запуске двух клапанов 23, 24 имеет место равенство давлений между камерами 17 и 18. Положение, которое занимает орган 11 по отношению к органу 12, тем самым не изменяется. Однако, если клапан 23 открыт дольше, давление в камерах 17 повышается, а орган 11 поворачивается против часовой стрелки по отношению к органу 12, если смотреть на фиг. 2. Если по какой-либо причине рулевое колесо держат в неподвижном положении, орган 12 также может поворачиваться по часовой стрелке по отношению к органу 11. В обоих случаях эффект фактически один и тот же. Достигается требуемое относительное смещение органа 33 к органу 32, которое сопровождается требуемым приведением в действие двигателя рулевого управления, присоединенного к патрубкам L, R.
Очевидно, что возможно наличие еще большего количества камер повышенного давления, чем показанные восемь камер. В целом максимальная возможность регулирования между внутренним и внешним регулирующими подвижными органами составляет около 15o. Следовательно, нет необходимости в более крупных в окружном направлении камерах повышенного давления. Чем больше эти камеры, тем больше окружные поверхности приложения давления, и тем больший создаваемый крутящий момент может быть создан при том же самом давлении.
Выступы 15, 16 закруглены по своему свободному краю, а именно по краю, которым они упираются в соответствующий другой орган 12, 11. Это округление снижает износ и улучшает герметичность.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ МЕХАНИЗМ И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1996 |
|
RU2143985C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ, ПОДАВАЕМОГО К БЛОКУ ГИДРОСТАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2123447C1 |
| КЛАПАН СО СРЕДСТВАМИ ПРЕДВАРИТЕЛЬНОЙ РЕГУЛИРОВКИ | 1993 |
|
RU2102646C1 |
| ПОДЪЕМНЫЙ КЛАПАН | 1999 |
|
RU2171934C2 |
| РЕГУЛИРУЮЩИЙ КЛАПАН | 2008 |
|
RU2447345C2 |
| ЗАДВИЖКА ДЛЯ РЕГУЛИРОВКИ РАСХОДА | 2007 |
|
RU2406000C1 |
| ВЕНТИЛЬ, В ЧАСТНОСТИ ТЕРМОСТАТИЧЕСКИЙ ВЕНТИЛЬ ДЛЯ ОТОПИТЕЛЬНЫХ УСТАНОВОК | 2000 |
|
RU2191310C2 |
| ВЕНТИЛЬ, В ЧАСТНОСТИ ТЕРМОСТАТИЧЕСКИЙ ВЕНТИЛЬ ДЛЯ ОТОПИТЕЛЬНЫХ УСТАНОВОК | 2000 |
|
RU2205313C2 |
| ВЕНТИЛЬ, В ОСОБЕННОСТИ ТЕРМОРЕГУЛИРУЮЩИЙ РАСШИРИТЕЛЬНЫЙ ВЕНТИЛЬ | 1995 |
|
RU2120577C1 |
| ТЕРМОСТАТИЧЕСКАЯ НАСАДКА КЛАПАНА | 2000 |
|
RU2211979C2 |
Изобретение относится к гидравлическим рулевым механизмам рулевого управления. Гидравлический рулевой механизм содержит корпус (3), в котором с возможностью вращения друг относительно друга установлены внутренний регулирующий подвижный орган и внешний регулирующий подвижный орган, вместе расположенные как средства формирования изменяемого проточного канала между подводящими соединительными средствами и рабочими соединительными средствами. Для дистанционного регулирования каждый регулирующий подвижный орган присоединен к ведущему подвижному органу (12, 11), между двумя ведущими подвижными органами образована по меньшей мере одна камера (17а-d, 18а-d) повышенного давления, которая подвергается воздействию текучей среды под давлением и изменение объема которой вызывает относительное смещение двух регулирующих подвижных органов. Технический результат заключается в создании приспособления для дистанционного регулирования, предназначенного для рулевого механизма, имеющего простую конструкцию. 12 з.п. ф-лы, 2 ил.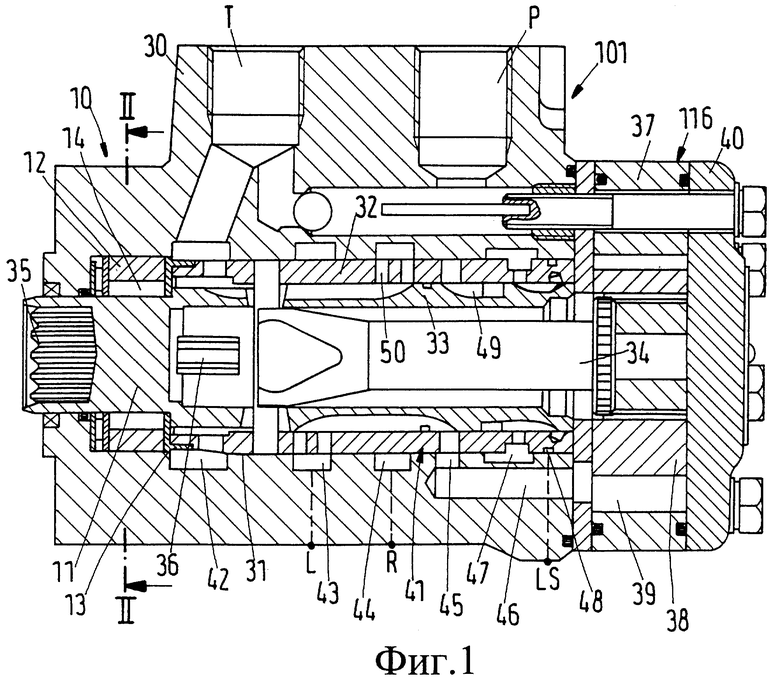
| DE 4342933 C2, 19.10.95 | |||
| DE 3619331 A1, 29.01.87 | |||
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР С ПРЕОБРАЗОВАТЕЛЬНЫМ БЛОКОМ, СОДЕРЖАЩИМ ПРИЕМНИК И КОЛЕНЧАТЫЙ СОЕДИНИТЕЛЬ | 2011 |
|
RU2518030C2 |
| Роторный гидравлический распределитель | 1971 |
|
SU477032A1 |
