Изобретение относится к гидравлическому рулевому механизму, в особенности для транспортного средства, содержащему корпус, в котором с возможностью перемещения друг относительно друга установлены два подвижных органа, вместе образующие по меньшей мере один регулируемый дроссель, и возвратное устройство для возврата в нейтральное положение этих двух подвижных органов, один из которых выполнен с возможностью его приведения в движение, а другой находится в функциональной связи с измерительным устройством. Кроме того изобретение относится к способу управления транспортным средством, в котором рабочую жидкость подают в двигатель рулевого управления, пропускают ее посредством рулевого механизма и отводят обратно, при этом в рулевом механизме перемещают два подвижных органа друг относительно друга.
Такой рулевой механизм и такой способ описаны в патенте США N 4759182. В этом случае два подвижных органа расположены в корпусе концентрично по отношению друг к другу. При управлении они взаимно поворачиваются, и внутренний подвижный орган может подвергаться воздействию рулевого колеса, при этом внешний подвижный орган присоединен к внутреннему посредством пружинного устройства, служащего в качестве возвратного устройства. Таким образом между двумя подвижными органами возможно некоторое относительное перемещение. Однако они могут занять нейтральное положение только в том случае, если рабочая жидкость прошла через измерительный двигатель и привела его в действие, так что внешний подвижный орган может последовать за внутренним. В известном рулевом механизме такое действие предназначено для обеспечения расширения рабочей жидкости, так что не вся рабочая жидкость может протекать через измерительный двигатель. Для этого параллельно измерительному двигателю установлен регулируемый дроссель.
Тем не менее должна существовать возможность работы такого рулевого механизма и при выходе из строя источника давления. В этом случае измерительный двигатель следует использовать в качестве вспомогательного насоса, создающего необходимое для регулирования рулевого механизма давление. Для этого регулируемый дроссель в проточном канале, расположенный параллельно измерительному двигателю, должен закрываться в верхней точке диапазона регулирования. Предполагаемое само по себе расширение рабочей жидкости исчезает, как только достигается большой и быстрый угол закрытия. Однако частая необходимость в таком угле закрытия возникает именно в критических ситуациях. Отсутствие требуемого расширения может привести к опасной ситуации.
Целью настоящего изобретения является улучшение взаимодействия между управляющим крутящим моментом и расширением потока, в особенности приведение к лучшей линейной зависимости отношения между управляющим крутящим моментом и расширением потока и увеличение стабильности рулевого механизма.
В рулевом механизме указанного во вступительной части типа эта цель достигается тем, что измерительное устройство действует в качестве насоса и расположено в проточном канале, замкнутом на себя, мимо которого проходит открытый проточный канал от подводящих соединительных средств до отводящих соединительных средств.
В этом случае отводящие соединительные средства содержат два рабочих патрубка, присоединенных к двигателю рулевого управления. В зависимости от того, какой из двух рабочих патрубков находится под давлением, двигатель рулевого управления регулирует поворот влево или вправо. Подводящие соединительные средства содержат нагнетательный патрубок, присоединенный к насосу или к другому источнику давления, и сливной патрубок, по которому рабочая жидкость, текущая назад из двигателя рулевого управления, подается в резервуар. Предложенная конструкция имеет две системы циркуляции, которые могут быть гидравлически изолированы друг от друга. Эти системы циркуляции выполнены в виде замкнутого проточного канала, в котором расположено измерительное устройство и который рассчитан только для регулирования относительного перемещения двух подвижных органов, и в виде открытого проточного канала, по которому "рабочая текучая среда" течет со стороны давления к двигателю рулевого управления и обратно. Путем перемещения двух подвижных органов друг относительно друга регулируют по меньшей мере открытый проточный канал. После приведения в движение одного подвижного органа регулируемый дроссель в открытом проточном канале открывается, и рабочая жидкость может течь от насоса к рабочим патрубкам. Посредством возвратного устройства приведенный в движение подвижный орган пытается увлечь за собой не приведенный в движение подвижный орган, так что возвратное устройство протягивает один подвижный орган по другому. Однако в связи с этим направляемый подвижный орган должен привести в действие измерительное устройство в виде насоса и провести жидкость через замкнутую систему циркуляции так, что из-за произведенных действий возврат не приведенного в движение подвижного органа задерживается. При соответствующей конструкции регулируемого дросселя и двух подвижных органов возможно обеспечение того, что при перемещении одного подвижного органа, достигнутом благодаря внешним приводным средствам, дроссель в открытом проточном канале остается открытым достаточно долго для прохода нужного количества рабочей жидкости через двигатель рулевого управления. Таким нужным количеством рабочей жидкости является количество, необходимое для перемещения двигателя рулевого управления на требуемое расстояние. Поскольку в замкнутый проточный канал не поступает рабочая жидкость, находящаяся в открытом проточном канале, измерительное устройство может быть выполнено относительно небольшим. Удовлетворительная точность может быть обеспечена даже в том случае, когда для регулирования транспортного средства требуется относительно большое количество рабочей жидкости, например в больших транспортных средствах и в управляемых машинах. Размеры обоих проточных каналов могут не зависеть друг от друга. Изоляция двух проточных каналов друг от друга предотвращает попадание рабочей жидкости из открытого канала в замкнутый канал. Кроме того, предложенный рулевой механизм является более стабильным по сравнению с известными рулевыми механизмами, в особенности это касается возможности возникновения колебаний.
В предпочтительной конструкции замкнутый проточный канал имеет по меньшей мере один дроссель, регулируемый путем перемещения двух подвижных органов друг относительно друга. Таким образом характеристика регулирования рулевого механизма может быть еще дополнительно улучшена. Характеристика срабатывания рулевого механизма может быть в действительности изменена посредством регулируемого дросселя, расположенного в замкнутом проточном канале. При широко открытом дросселе не приводной подвижный орган может перемещаться по приводному подвижному органу быстрее, чем при нахождении дросселя в закрытом или почти закрытом положении. Регулируемый дроссель в замкнутом проточном канале соответственно также остается открытым в течение более длительного или короткого периода времени. Следовательно, регулируемый дроссель в замкнутом проточном канале обеспечивает дополнительную возможность для расширительного фактора, находящегося под воздействием рулевого механизма.
В замкнутом проточном канале предпочтительно расположен по меньшей мере один регулируемый дроссель, повышающий гидравлическое сопротивление в указанном канале в зависимости от заданного относительного перемещения вперед двух подвижных органов. Таким образом, может быть создан противодействующий крутящий момент, в особенности при использовании для приведения в движение одного подвижного органа рулевого колеса, поскольку возвратному устройству труднее направлять не приводной подвижный орган из-за повышенного гидравлического сопротивления в замкнутом проточном канале. Противодействующая сила, воздействующая на приводной подвижный орган через возвратное устройство, соответственно является силой, действующей затем на рулевое колесо.
Открытый проточный канал предпочтительно содержит по меньшей мере один регулируемый дроссель между подводящими соединительными средствами и отводящими соединительными средствами, а также между отводящими соединительными средствами и подводящими соединительными средствами. Таким образом, может быть получено более равномерное распределение сил, действующих на два подвижных органа. Риск заклинивания двух подвижных органов друг против друга или в корпусе уменьшен. С использованием двух согласованных друг с другом дросселей нагрузка на отдельный дроссель дополнительно поддерживается более низкой.
В открытом проточном канале предпочтительно расположен по меньшей мере один регулируемый измерительный дроссель, служащий в качестве генератора сигналов для создания LS-сигнала. LS-сигнал, также называемый сигналом восприятия нагрузки, несет информацию о нагружении давлением рулевого механизма. Эта информация при необходимости может быть использована, например для регулирования насоса, создающего необходимое гидравлическое давление.
В предпочтительном варианте выполнения рулевой механизм содержит средства воздействия на давление, поддерживающие постоянный перепад давления в измерительном дросселе посредством сигналов восприятия нагрузки. Расход потока через измерительный дроссель и степень открытия этого дросселя, таким образом, хорошо скоррелированы друг с другом. Следовательно, в большинстве случаев может быть получена фактически линейная зависимость между степенью открытия измерительного дросселя и расходом протекающей через него рабочей жидкости.
В связи с этим особенно предпочтительным является то, что место измерения в открытом проточном канале за измерительным дросселем соединено со сливным патрубком посредством перепускного дросселя, открытого при нахождении двух подвижных органов в нейтральном положении и закрытого при относительном изменении их положения друг относительно друга. Таким образом может быть получена система восприятия нагрузки, которая в настоящем случае может иметь динамичную конструкцию. Однако эта система может быть статической.
В особенно предпочтительной конструкции между открытым и замкнутым проточными каналами расположен обратный клапан, закрытый в направлении к замкнутому проточному каналу. Несмотря на изоляцию двух проточных каналов, с использованием этого обратного клапана в данном случае может быть получена функция аварийного управления. В действительности при падении давления насоса для открытия обратного клапана достаточно давления рабочей жидкости, подаваемой измерительным устройством, в данном случае действующим в качестве насоса. Измерительное устройство может затем нагнетать рабочую жидкость через обратный клапан в открытый проточный канал для приведения в действие двигателя рулевого управления. Однако в обратном направлении канал остается закрытым обратным клапаном, так что поток рабочей жидкости в замкнутом проточном канале не подвергается воздействию потока рабочей жидкости открытого проточного канала.
Обратный клапан предпочтительно присоединен к нагнетательной линии открытого проточного канала, а рулевой механизм содержит соединение, ведущее к сливной линии указанного канала. Таким образом, функция аварийного управления более не зависит от количества жидкости, находящейся в замкнутом проточном канале. Наоборот, рабочая жидкость может, следовательно, откачиваться из резервуара через сливную линию.
В этом случае между обратным клапаном и соединением, ведущим к сливной линии, предпочтительно расположен дроссель, в особенности дроссель, выполненный с возможностью закрытия. Когда измерительное устройство действует в качестве насоса и нагнетает рабочую жидкость, дроссель может быть закрыт, так что рабочая жидкость при этом не может более прокачиваться по контуру в системе циркуляции в замкнутом проточном канале, а течет через обратный клапан в открытый проточный канал.
Обратный клапан также предпочтительно выведен в нагнетательную линию перед первым дросселем, расположенным в ней. В этом месте при работоспособном насосе давление является наибольшим. Таким образом, обратный клапан с большой степенью надежности удерживается закрытым, а влияние жидкости в открытом проточном канале на жидкость в замкнутом канале, таким образом, тоже с большой степенью надежности исключено.
В замкнутом проточном канале предпочтительно расположен запорный клапан, посредством которого поток в указанном канале может быть перекрыт. Как только этот канал перекрыт, отсутствует возможность перемещения не приводного подвижного органа возвратным устройством в положение приводного подвижного органа. Сохраняется относительное смещение этих двух подвижных органов друг относительно друга. В этом положении рабочая жидкость может протекать от насоса к двигателю рулевого управления без регулирования, которое должно быть дополнительно инициировано, например без рулевого колеса, которое должно быть дополнительно повернуто. Такой режим работы, названный также "spak"-управлением, отбирает рабочую нагрузку у водителя. При закрытом запорном клапане водителю нужно только переместить рулевое колесо на заданный угловой интервал. Двигатель рулевого управления толкает колеса или другие управляемые элементы регулирования в заданное положение в течение времени, при котором рулевое колесо находится в смещенном положении.
Запорный клапан предпочтительно выполнен в виде клапана, управляемого давлением, который в направлении открытия подвергается воздействию давления нагнетания. Таким образом, запорный клапан приобретает дополнительную функцию. Действительно, при падении давления нагнетания он автоматически перекрывает замкнутый проточный канал. В этом случае следует учесть, что насос не может подавать давление, необходимое для управления транспортным средством, так что следует использовать функцию аварийного управления измерительного устройства. Поскольку запорный клапан предотвращает протекание рабочей жидкости, передаваемой измерительный устройством, по системе циркуляции в замкнутом проточном канале, то эта рабочая жидкость автоматически нагнетается в двигатель рулевого управления.
Запорный клапан в направлении закрытия предпочтительно подвергается воздействию давления за измерительным дросселем. Таким образом, запорный клапан удерживается в открытом положении давлением в измерительном дросселе. При слишком большом понижении давления, например из-за дополнительного смещения двух подвижных органов друг относительно друга, измерительный дроссель открыт широко, а дополнительное смещение подвижных органов заблокировано, что в виде крайней меры может быть прервано водителем. В то же время, однако, перемещение не приводного подвижного органа за приводным предотвращено, так что в случае наличия ограничителей больших углов поворота рулевого колеса автоматически устанавливается "spak"-управление.
Запорный клапан также предпочтительно выполнен в виде электромагнитного клапана. Тогда для изменения режима регулирования и инициирования так называемого "spak"-управления могут использоваться внешние сигналы.
Между внутренним и внешним подвижными органами преимущественно расположены две камеры повышенного давления, выполненные с возможностью повышения в них давления посредством жидкости под давлением, при этом увеличение объема одной камеры повышенного давления вызывает относительное смещение двух подвижных органов. Таким образом на рулевой механизм можно воздействовать посредством дистанционного регулирования, то есть один подвижный орган может быть приведен в движение посредством увеличения давления в одной из двух камер повышенного давления.
В связи с этим предпочтительно, чтобы два подвижных органа были расположены концентрично по отношению друг к другу, а две камеры повышенного давления в сечении имели бы форму части кругового кольца, причем как внешний, так и внутренний подвижный орган имеет соответствующий выступ, упирающийся в соответствующий другой подвижный орган и ограничивающий камеры повышенного давления. Концентричное расположение двух подвижных органов обеспечивает возможность их простой ориентации в одном направлении и сравнительно простого осуществления их относительного перемещения в другом направлении.
Две камеры повышенного давления предпочтительно присоединены к источнику давления посредством соответствующего регулирующего устройства, что облегчает дистанционное регулирование. Регулирующее устройство может регулировать давление в двух камерах повышенного давления или в каждой камере повышенного давления, так что обеспечено необходимое относительное перемещение двух подвижных органов друг относительно друга.
Регулирующие устройства предпочтительно выполнены в виде электромагнитных клапанов с импульсным регулированием, выполненных с возможностью регулирования, например посредством фазоимпульсной модуляции, что обеспечивает весьма точное размещение двух подвижных органов друг относительно друга.
Цель изобретения также достигается тем, что в указанном во вступительной части описания способе возврат двух подвижных органов в нейтральное положение осуществляют под воздействием отдельной жидкости.
Эта расположенная в замкнутом проточном канале другая жидкость в основном вызывает задержку, с которой два подвижных органа перемещаются назад в нейтральное положение. Более точно, это вызывает задержку, с которой один подвижный орган перемещается по другому подвижному органу. До тех пор, пока эти два органа снова не займут взаимное нейтральное положение, обеспечено нагнетание рабочей жидкости в рулевой механизм.
Ниже изобретение описано со ссылкой на предпочтительные варианты выполнения и на чертежи, на которых:
фиг. 1 изображает первый вариант выполнения рулевого механизма, присоединенного к двигателю рулевого управления;
фиг. 2 изображает второй вариант выполнения рулевого механизма;
фиг. 3 изображает третий вариант выполнения рулевого механизма;
фиг. 4 изображает четвертый вариант выполнения рулевого механизма;
фиг. 5 изображает схему рулевого механизма;
фиг. 6 изображает развернутый вид узла подвижных органов и
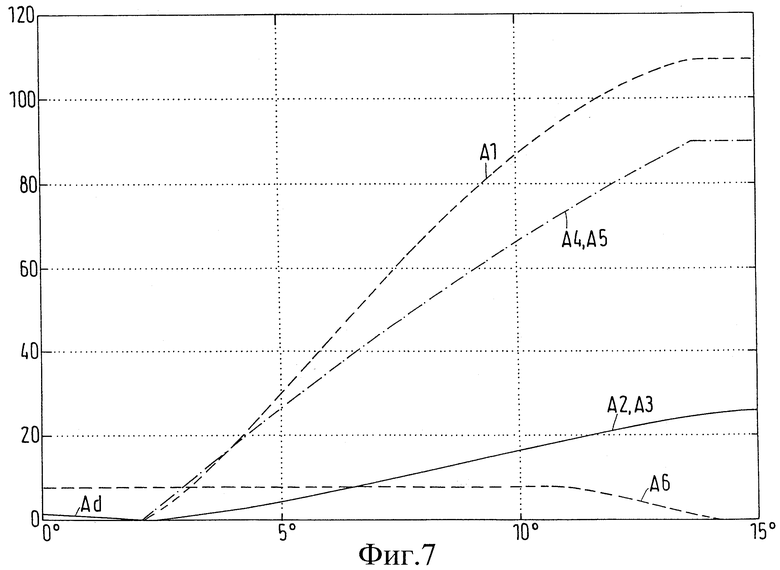
фиг. 7 изображает кривые, показывающие степень открытия регулируемых дросселей в зависимости от смещения подвижных органов.
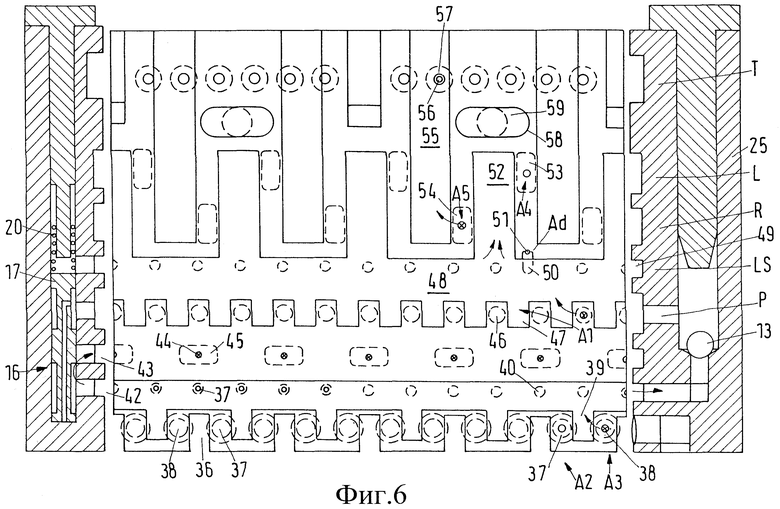
Рулевой механизм 1 содержит нагнетательный патрубок P, присоединенный через приоритетный клапан 2 к насосу 3, который нагнетает рабочую жидкость из резервуара 4 через механизм 1. Кроме того, механизм 1 имеет сливной патрубок Т, также присоединенный к резервуару 4. Патрубки P и Т вместе образуют подводящие соединительные средства.
Механизм 1 также содержит отводящие соединительные средства, включающие рабочие патрубки А, В, присоединенные посредством блока 5 определения направления к направляющим патрубкам R, L, которые, в свою очередь, также присоединены к двигателю 6 рулевого управления. Блок 5 изображен в виде отдельного элемента только из соображений ясности. В действительности блок 5 является составной частью механизма 1. Регулирование направления достигается тем, что на механизм 1 каждый раз в различных направлениях воздействует крутящий момент, так что его подвижные органы, не показанные на чертеже, перемещаются в различных направлениях друг относительно друга.
Механизм 1, как и известные рулевые механизмы, содержит не показанный на чертежах корпус, который снабжен указанными патрубками P, Т, R, L и в котором концентрично по отношению друг к другу расположены два подвижных органа. Оба эти органа установлены с возможностью вращения по отношению к корпусу и в разных направлениях по отношению друг к другу.
Внутренний из двух подвижных органов в этом случае выполнен с возможностью приведения в движение, например посредством вала, присоединенного к рулевому колесу, или дистанционного двигателя управления. Внешний подвижный орган присоединен к внутреннему подвижному органу посредством возвратного устройства, например пружинного приспособления. При повороте внутреннего подвижного органа возвратное устройство пытается протянуть по нему внешний подвижный орган и вернуть его обратно в такое положение по отношению к внутреннему подвижному органу, в котором оба подвижных органа занимают нейтральное положение по отношению друг к другу.
Однако внешний подвижный орган, аналогичный известному, например из упомянутого в начале описания патента США N 4759182, присоединен к измерительному устройству 7, например к зубчатому колесу зубчатой передачи, которое движется по орбите и вращается в кольце с зубчатым венцом. Очевидно, что внутренний подвижный орган может выполнять те же функции, что и внешний подвижный орган, который в этом случае будет выполнять функции внутреннего.
В отличие от известных конструкций устройство 7 не действует в качестве двигателя, приводимого в действие извне рабочей жидкостью, а действует в качестве насоса. Как можно видеть на фиг. 1, этот насос расположен в замкнутом проточном канале 8, который проходит от выхода устройства 7 к его входу. Канал 8 содержит три регулируемых дросселя A2, A3 и A6, которые образованы отверстиями в двух подвижных органах, причем эти отверстия могут быть совмещены или смещены из этого положения. Альтернативно дроссели, образованные в механизме 1, могут быть образованы поверхностными структурами в подвижных органах (это касается также и следующих дросселей).
В этом случае два дросселя A2, A3 выполнены так, что они открыты при повороте подвижных органов друг против друга. С другой стороны, дроссель A6 выполнен так, что с момента некоторого относительного перемещения двух подвижных органов вперед он начинает закрываться и оказывается закрытым при некотором угле поворота двух подвижных органов. Когда в случае небольшого смещения или поворота двух подвижных органов друг против друга устройство 7 приводится в действие, в канале 8 имеет место некоторое гидравлическое сопротивление, так что возврат двух подвижных органов возвратным устройством опять в нейтральное положение по отношению друг к другу занимает некоторое время, поскольку насосу требуется некоторое время для приведения в движение необходимого количества рабочей жидкости через канал 8.
Кроме того, механизм 1 имеет открытый проточный канал 9, образованный нагнетательной линией 10 и сливной линией 11. Линия 10 соединена с патрубком P и рабочим патрубком A. Сливная линия расположена между патрубком Т и другим рабочим патрубком В. В линии 10 расположены два регулируемых дросселя A1, A4. Еще один регулируемый дроссель A5 расположен в линии 11. Дроссели A1, A4 и A5 также образованы двумя подвижными органами, то есть они регулируются поворотом этих двух органов друг относительно друга. Дроссели A1, A4 и A5 открыты, когда два подвижных органа повернуты друг относительно друга.
Кроме того, механизм 1 содержит перепускную линию 12, имеющую перепускной дроссель Ad и расположенную между линиями 10 и 11. Линия 12 ответвляется в этом случае между двумя дросселями A1, A4. Дроссель Ad открыт при нахождении двух подвижных органов в нейтральном положении и закрыт, как только эти два органа поворачиваются друг относительно друга на небольшой угол. Характеристики открытия и закрытия отдельных дросселей представлены на фиг. 7.
Дроссель A1 может быть также назван измерительным дросселем. LS-сигнал (сигнал восприятия нагрузки) выдается за этим дросселем A1, что означает, что за ним отмечено давление. Сигнал возвращается к клапану 2 и осуществляет регулирование этого клапана 2, так что давление в дросселе A1 всегда поддерживается на постоянном уровне. Таким образом, количество жидкости, протекающей через дроссель A1, в действительности всегда имеет фактически линейную зависимость от степени его открытия. Альтернативно LS-сигнал может также быть использован в качестве сигнала управления для регулируемого насоса.
Рулевой механизм, изображенный на фиг. 1, работает следующим образом.
Когда внутренний подвижный орган повернут по отношению к внешнему подвижному органу на небольшой угол, например на 5o, дроссели A1-A5 открыты. Дроссель Ad закрыт. Рабочая жидкость может протекать от насоса 3 к двигателю 6. Рабочая жидкость, вытесненная двигателем 6, снова течет через механизм 1 назад к резервуару 4. Количество жидкости, поданной в двигатель 6, регулируется посредством дросселей A1, A4 и A5.
В то же самое время возвратное устройство пытается отвести два подвижных органа назад в нейтральное положение, то есть изменить угол до 0o. Однако для этого сначала внешний подвижный орган должен привести в действие устройство 7 для обеспечения возможности следования за внутренним подвижным органом и провести соответствующее количество рабочей жидкости через канал 8, то есть через дроссели A2, A3 и A6. По завершении возврата двух подвижных органов в нейтральное положение дроссели A1, A2, A3, A4 и A5 снова закрыты.
Как очевидно из фиг. 7, зависимость между углом поворота и степенью открытия дросселей является фактически линейной. Поскольку перепад давления в дросселе A1 с помощью LS-сигнала поддерживают постоянным, в результате может быть получена фактически линейная характеристика расширения, то есть ограничение угла поворота управляемых колес (или другого управляемого элемента, например судового руля) всегда соответствует одному и тому же множителю ограничения угла поворота рулевого колеса или других средств привода для рулевого механизма.
Однако для больших ограничений угла поворота рулевого колеса, то есть для больших относительных смещений двух подвижных органов регулирование несколько отличается. При смещении двух подвижных органов друг против друга на угол, больший заданного, например на 15, регулируемый дроссель A6 закрыт (фиг. 7). В этом случае рабочая жидкость не может более протекать по каналу 8, так что устройство 7, действующее в качестве насоса, не может также более подавать эту жидкость. Протягивание внешнего подвижного органа относительно внутреннего тем самым заблокировано. Следовательно, оба подвижных органа остаются в повернутом положении по отношению друг к другу, при этом дроссели A1, A4, A5 в канале 9 остаются открытыми. Без дополнительного поворота рулевого колеса двигатель 6, следовательно, смещается дальше со скоростью, соответствующей присутствующей затем степени открытия дросселей A1, A4 и A5.
В этой конструкции устройство 7 может быть относительно небольшим. В основном оно нужно только для задержки прохождения внешнего подвижного органа относительно внутреннего подвижного органа, который приводится в движение рулевым колесом или устройством дистанционного регулирования, до тех пор, пока достаточное количество рабочей жидкости пройдет к двигателю 6.
Два канала 8, 9 могут быть полностью изолированы друг от друга. В принципе, в канале 8 возможно даже использование другой жидкости, кроме той, которая используется в канале 9. Однако преимущественным является использование в обоих каналах одной и той же рабочей жидкости, поскольку фактически невозможно получить в механизме 1 полностью герметичный узел подвижных органов.
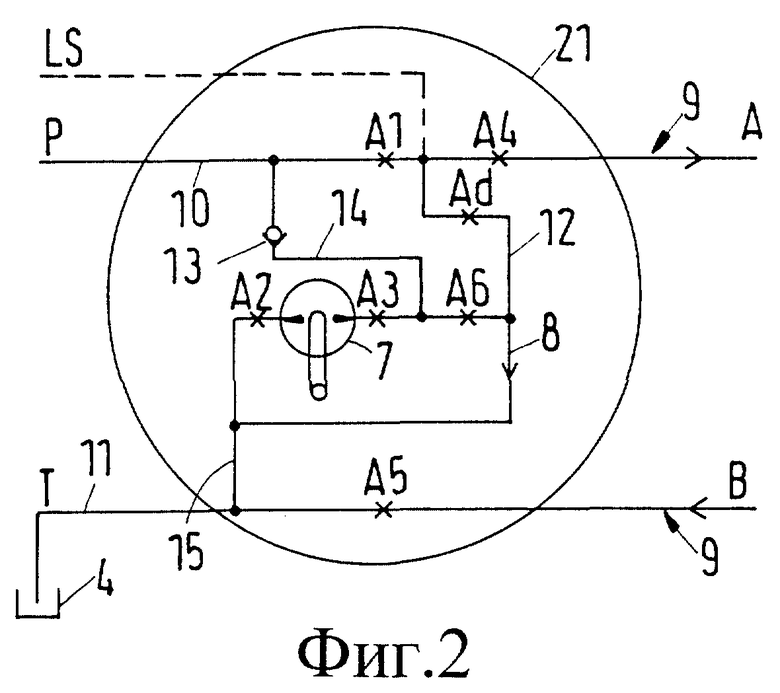
На фиг. 2 показан второй вариант выполнения рулевого механизма 21, в котором части, соответствующие аналогичным частям на фиг. 1, обозначены одинаковыми номерами позиций.
Этот вариант выполнения имеет два отличия по сравнению с конфигурацией, показанной на фиг. 1. Во-первых, линия 12 в этом случае проходит через замкнутый проточный канал 8. Это не вызывает никаких проблем, поскольку при повороте двух подвижных органов друг против друга дроссель A1 закрыт, так что не следует опасаться, что рабочая жидкость проникнет из канала 9 в канал 8. Наоборот, при нахождении двух подвижных органов в нейтральном положении поток через канал 8 невозможен, поскольку дроссели A2, A3 закрыты.
Кроме того, между каналами 8 и 9 установлен обратный клапан 13, закрытый в направлении к каналу 8. Обратный клапан расположен во вспомогательной линии 14, присоединенной между дросселями A3, A6 в канале 8 и между патрубком P и дросселем A1 в канале 9 или, более точно, в линии 10. На клапан 13, таким образом, в направлении закрытия воздействует давление нагнетания, а в направлении открытия - давление между дросселями A3 и A6. Так как давление в патрубке P в целом больше давления перед дросселем A6, клапан 13 обычно остается закрытым. Он открывается только при падении фактически до нуля давления в патрубке P, что случается только при неисправности насоса 3. В этом случае устройство 7 может действовать в качестве аварийного насоса.
Для этого канал 9 присоединен посредством всасывающей линии 15 к линии 11, так что устройство 7 может качать рабочую жидкость из резервуара через линию 15. При такой аварийной работе необходимо большое смещение двух подвижных органов друг относительно друга для того, чтобы с необходимой мощностью осуществлять привод устройства 7. При таком большом смещении, однако, дроссель A6 закрыт, так что рабочая жидкость нагнетается в двигатель 6 из линии 11 через дроссели A2, A3, клапан 13 и дроссели A1, A4.
Между точками P и A1 преимущественно может быть также вставлен обратный клапан, открытый в направлении к A1. Это обеспечивает отсутствие протекания рабочей жидкости наружу через линию P, когда, например патрубок давления перекрыт.
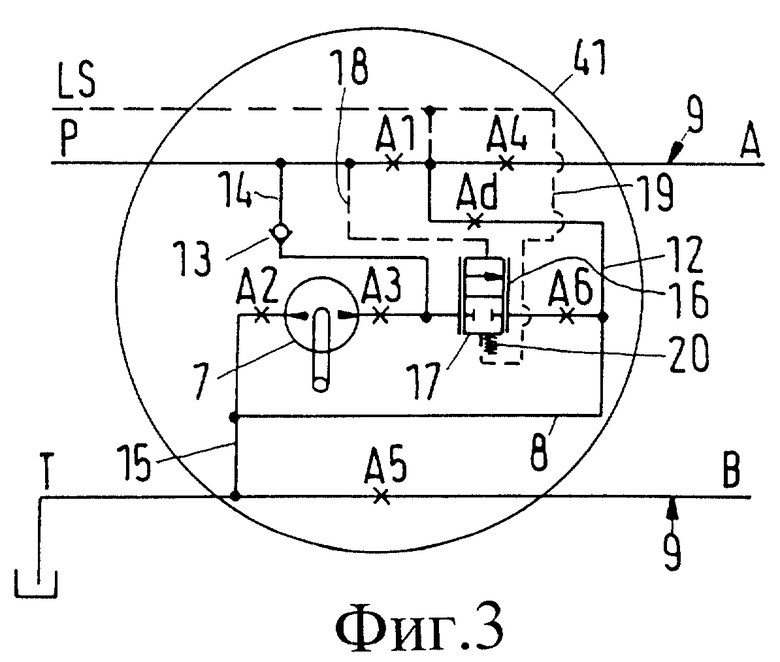
На фиг. 3 показана третья конфигурация рулевого механизма 41, в котором части, соответствующие аналогичным частям на фиг. 1 и 2, обозначены одинаковыми номерами позиций.
По сравнению с фиг. 2 в этой конфигурации добавлен запорный клапан 16, снабженный подвижным органом 17. Клапан 16 расположен в канале 8 и в положении, показанном на фиг. 3, может предотвратить циркуляцию жидкости в канале 8.
Орган 17 подвергается воздействию перепада давления в измерительном дросселе A1, то есть орган 17 в направлении открытия подвергается воздействию давления в патрубке P через линию 18, а в направлении закрытия - воздействию давления в LS-точке восприятия нагрузки через линию 19 и пружину 20.
Если перепад давления в дросселе A1 падает, то силы пружины 20 достаточно для смещения органа 17 в закрытое положение. Если канал 8 перекрыт, устройство 7 не может более пропускать жидкость и создает тем самым препятствие, так что поворот внешнего подвижного органа заблокирован. Только внутренний подвижный орган может поворачиваться, и под действием возвратной пружины он автоматически поворачивается обратно в нейтральное положение. Это снова создает так называемое "spak"-управление. Усилие пружины 20 может быть выбрано, например так, что ее сила превышает силу перепада давления в дросселе A1, когда последний достиг наибольшей ширины открытия. В этом случае дальнейший поворот двух подвижных органов будет бессмысленным.
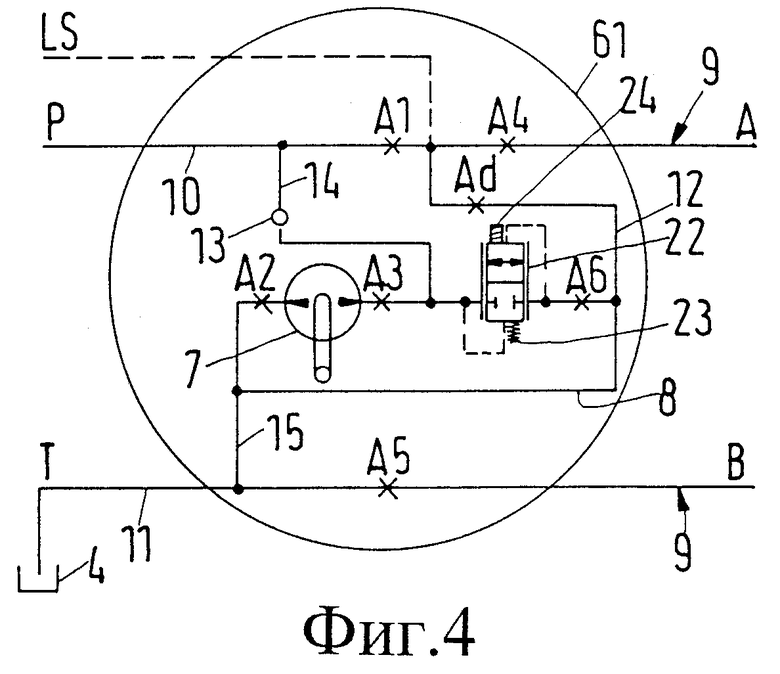
В конфигурации, которая показана на фиг. 4 и в которой части, соответствующие аналогичным частям на фиг. 1-3, обозначены одинаковыми номерами позиций, также присутствует запорный клапан 22, но выполненный в виде электромагнитного клапана. Электромагнитный клапан закрывается пружиной 23, а открывается магнитным приводом 24. "Spak"- управление может быть таким образом вызвано вне зависимости от произошедшего смещения двух подвижных органов.
Во многих случаях внутренний подвижный орган рулевого механизма приводится в движение посредством рулевого колеса через вал.
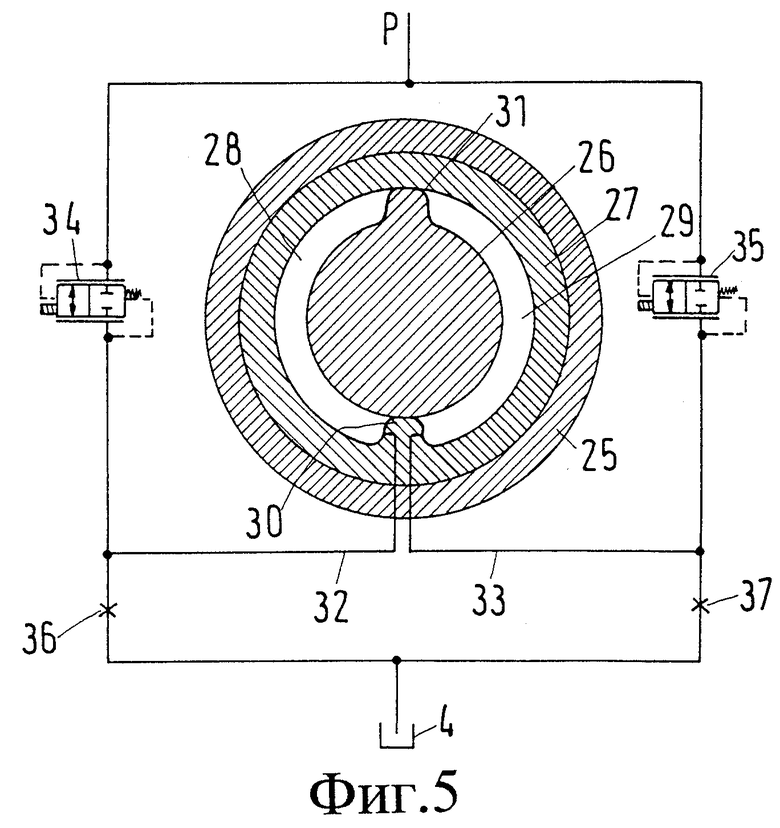
На фиг. 5 показана другая конфигурация, которая также может использоваться вместе с рулевым колесом.
В корпусе 25 внутренний подвижный орган 26 и внешний подвижный орган 27 расположены концентрично по отношению друг к другу. Между органами 26 и 27 образованы две камеры 28, 29 повышенного давления, отделенные друг от друга выступом 30 на органе 27, упирающимся в орган 26, и выступом 31 на органе 26, упирающимся в орган 27. Обе камеры повышенного давления линиями 32, 33 присоединены к патрубку Р. Однако в обеих линиях установлено электромагнитное клапанное устройство 34, 35, регулирующее поток рабочей жидкости в линиях 32, 33 и, таким образом, давление в камерах 28, 29. Электромагнитные клапаны 34, 35 могут быть выполнены с импульсным регулированием для установки каждый раз необходимого давления в камерах 28, 29. Излишняя рабочая жидкость может вытекать в резервуар 4 через дроссели 36, 37. Например, когда клапан 34 открыт, давление в камере 28 поднимается, и орган 26 поворачивается против часовой стрелки до тех пор, пока не установится равенство давлений. В противном случае поднимается давление в камере 29.
На фиг. 6 показан развернутый вид двух подвижных органов, причем контуры на наружной поверхности органа 26 показаны сплошными линиями, полости или сквозные отверстия в органе 27 - пунктирными линиями, а контуры корпуса 25 в радиальном сечении показаны заштрихованными.
Канал 8 имеет пазы 36, 39 и отверстия 37, 38. Паз 36 внутреннего подвижного органа имеет соединение с патрубком Т и вместе с отверстиями 37 образует дроссель A2. Не показанный патрубок в корпусе 25 ведет от отверстия 37 к устройству 7. От устройства 7 рабочая жидкость течет обратно через корпус 25 к отверстиям 38, которые вместе с пазами 39 образуют дроссель A3. Пазы 39 посредством отверстий 40 соединены с клапаном 13. Таким же образом пазы 39 соединены посредством отверстий 40 с кольцевым каналом 42 корпуса 25, соединенным с клапаном 16, который содержит подвижный орган 17 и пружину 20. Клапан 16 при его нахождении в открытом положении обеспечивает соединение с дополнительным кольцевым каналом 43, который присоединен к отверстиям 44, вместе с удлиненным отверстием 45, образующим дроссель A6. Отсюда рабочая жидкость может течь снова к пазам 36, или наоборот к резервуару, соединенному с пазами 36.
За патрубком P канал 9 образован полостями 46, вместе с пазами 47, образующими дроссель A1, присоединенный к более широкому каналу, в котором расположены отверстия 48, ведущие к LS-линии или LS-канавке 49 восприятия нагрузки.
Кроме того, дроссель Ad образован отверстиями 50, взаимодействующими с отверстиями 51 и в этом случае расположенными на внешнем подвижном органе, причем отверстия 51 расположены на внутреннем подвижном органе.
Кольцевой канал у выхода дросселя A1 также соединен с пазами 52 внутреннего подвижного органа. При повороте двух подвижных органов друг относительно друга эти пазы могут совместиться с удлиненным отверстием 53 внешнего подвижного органа, в результате чего может образоваться соединение, ведущее к патрубку L, или с отверстием 54, которое присоединено к патрубку R. В зависимости от направления, в котором два подвижных органа поворачиваются друг относительно друга, за этим автоматически следует регулирование рулевого механизма в отношении направления. Отверстие 54 при этом совпадает с удлиненным пазом 55. Паз 52 вместе с отверстием 53 образует дроссель A4, а вместе с отверстием 54 - дроссель A5. По завершении смещения в другом направлении условия меняются на обратные, то есть паз 52 вместе с отверстием 54 образует дроссель A4, а паз 55 вместе с отверстием 53 образует дроссель A5. Соединение, ведущее от пазов 55 к резервуару, обеспечивается отверстиями 56 и 57.
Кроме того, во внутреннем подвижном органе имеется удлиненная полость 58, в которую выступает стержень. Этот стержень может быть вставлен в полость 59 во внешнем подвижном органе, что действует в качестве специфического приспособления, ограничивающего перемещение двух подвижных органов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ МЕХАНИЗМ | 1996 |
|
RU2143984C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ, ПОДАВАЕМОГО К БЛОКУ ГИДРОСТАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2123447C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ РАСПРЕДЕЛЕНИЯ ТЕКУЧЕЙ СРЕДЫ | 2012 |
|
RU2508510C1 |
| ПОДЪЕМНЫЙ КЛАПАН | 1999 |
|
RU2171934C2 |
| КЛАПАН РЕГУЛИРОВКИ РАСХОДА | 2007 |
|
RU2395745C1 |
| КЛАПАН, В ЧАСТНОСТИ РАДИАТОРНЫЙ КЛАПАН, И ВСТАВКА ДЛЯ ТАКОГО КЛАПАНА | 2007 |
|
RU2392523C1 |
| КЛАПАН СО СРЕДСТВАМИ ПРЕДВАРИТЕЛЬНОЙ РЕГУЛИРОВКИ | 1993 |
|
RU2102646C1 |
| ЗАДВИЖКА ДЛЯ РЕГУЛИРОВКИ РАСХОДА | 2007 |
|
RU2406000C1 |
| СПОСОБ РАБОТЫ КЛАПАНА | 2010 |
|
RU2500945C2 |
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ЖИДКИХ ЛЕКАРСТВЕННЫХ ФОРМ | 2003 |
|
RU2279898C2 |
Изобретение относится к гидравлическим рулевым механизмам, в основном для транспортных средств. Гидравлический рулевой механизм (1) содержит корпус, в котором с возможностью перемещения друг относительно друга установлены два подвижных органа, вместе образующие по меньшей мере один регулируемый дроссель (А1-А6, Аd), и возвратное устройство для возврата в нейтральное положение этих двух подвижных органов, один из которых выполнен с возможностью его приведения в движение, а другой находится в функциональной связи с измерительным устройством (7). Для такого рулевого механизма существует потребность в улучшении корреляции между управляющим крутящим моментом и расширением потока и желательно это отношение привести к лучшей линейной зависимости. Для этого измерительное устройство (7) действует в качестве насоса и расположено в проточном канале (8), замкнутом на себя, мимо которого проходит открытый проточный канал (9) от подводящих соединительных средств (Р, Т) до отводящих соединительных средств (А, В). Технический результат заключается в приведении к лучшей линейной зависимости отношения между управляющим крутящим моментом и расширением потока и, следовательно, к увеличению стабильности работы рулевого механизма. 2 с. и 18 з.п. ф-лы, 7 ил.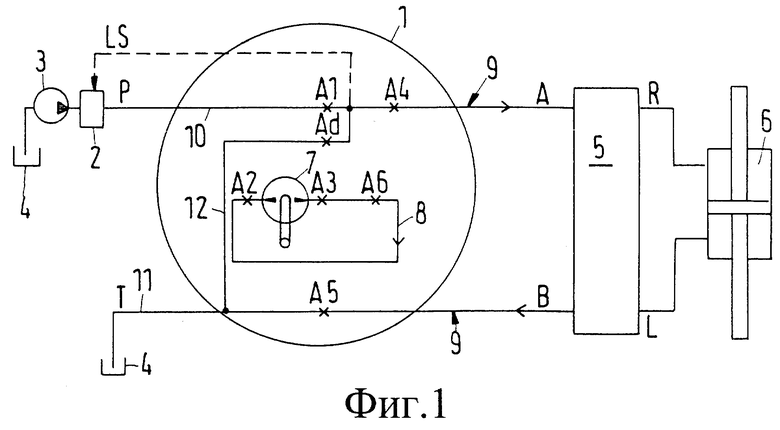
| US 4759182 A 26.07.88 | |||
| СПОСОБ ТЕРАПЕВТИЧЕСКОГО ВОЗДЕЙСТВИЯ НА ОРГАНИЗМ | 1996 |
|
RU2228531C2 |
| Способ предотвращения возгорания древесины опор оттока утечки | 1940 |
|
SU61005A1 |
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ЛЕКАРСТВЕННЫХ ПОРОШКОВ | 1991 |
|
RU2014096C1 |
| Гидравлический рулевой механизм для транспортного средства | 1974 |
|
SU597589A1 |
