Изобретение относится к измерению уровня жидкостей акустическим методом и может найти широкое применение в автоматизированных системах контроля и учета в нефтегазоперерабатывающей промышленности, водоснабжении и водоотведении в коммунальном хозяйстве, других отраслях народного хозяйства, связанных с производством, хранением и использованием жидкостей при нормальном атмосферном давлении.
Актуальность разработки новых средств измерения уровня жидких сред в открытых и закрытых, в том числе подземных резервуарах и лотках определяется необходимостью автоматизированного оперативного учета наличия и расхода на всех этапах их производства, хранения и реализации.
В настоящее время разработаны различные контактные и дистанционные устройства для измерения уровня жидких сред, в которых используются различные частотные диапазоны, в том числе ультразвуковой и звуковой (акустический). Однако существующие устройства измерения уровня жидкости не обладают достаточной универсальностью, надежностью, точностью, технологичностью, возможностью гибкой, оперативной программной перестройки применительно к условиям эксплуатации.
Известен акустический уровнемер (а.с. N 821939, М. кл.3 G 01 F 23/28), содержащий измерительный и эталонный датчики, каждый из которых состоит из блока возбуждения зондирующих импульсов, усилителя, излучателя и приемника акустических сигналов, включенных в схему автоциркуляции, трубу эталонного датчика, снабженную фиксированным отражателем, трубу измерительного датчика и регистрирующий блок. С целью повышения точности измерений в эталонной трубе установлены дополнительные фиксированные отражатели, а также введен блок синхронизации, включенный между выходом усилителя эталонного акустического датчика и блоком возбуждения зондирующих импульсов этого датчика.
Недостатками данного устройства являются использование отдельных блоков излучения и приема для каждой отдельной измерительной и эталонной труб, наличие в эталонной трубе нескольких фиксированных отражателей и применение автоциркуляционной схемы, что в конечном итоге может приводить к увеличению погрешности измерений уровня в некоторых интервалах его значений из-за интерференционных явлений в эталонной трубе, расхождения параметров приемопередающих устройств обоих каналов, остаточных погрешностей в схеме автоциркуляции.
Известно устройство для измерения уровня жидких сред (см. а.с. СССР N 1048322, M. кл.3 G 01 F 23/28), содержащее расположенный над контролируемой средой двухлучевой акустический излучатель, генератор зондирующих импульсов, усилитель-формирователь, электронные ключи, ждущий управляемый мультивибратор, реверсивный счетчик и триггер.
Недостатками данного устройства, которые могут приводить к снижению точности измерения, являются использование двухлучевого акустического излучателя, обеспечивающего одновременное излучение и прием сигналов во взаимно перпендикулярных плоскостях, необходимость "точной" установки этого излучателя с учетом требований создания "эталонного" расстояния l0 во взаимно перпендикулярных плоскостях, сложный алгоритм формирования информационных сигналов, использование вторично переотраженных сигналов, что накладывает дополнительные требования на уровень излучаемой мощности, расположение эталонного расстояния в горизонтальной плоскости.
Известен акустический уровнемер (пат. RU N 2010180, M.кл.5 G 01 F 23/28), содержащий звукопровод, выполненный в виде трубы, снабженный отражателем со шлифованной поверхностью, акустический измерительный элемент, соединенный с блоком регистрации, стержневой волновод, установленный соосно в трубе. Отражатель выполнен трапецеидальной формы и закреплен на трубе напротив рабочего торца волновода. При этом боковые грани отражателя установлены под углом 60o к горизонтальной грани отражателя, которая расположена перпендикулярно рабочему торцу волновода.
Недостатки данного устройства определяются крайне сложной структурой звукопровода, что ограничивает области его использования, кроме того, введение отражателя в звукопровод может приводить к интерференционным явлениям за счет многократного отражения от его поверхности.
Наиболее близким по назначению и технической сущности к предлагаемому техническому решению аналогом-прототипом может служить акустический уровнемер, защищенный авторским свидетельством СССР N 1615559, М. кл.5 G 01 F 23/28. Он содержит измерительную трубу с акустическим излучателем зондирующего импульса и приемником акустических сигналов, усилитель-формирователь зондирующего видеоимпульса, усилитель-формирователь принятых импульсов, схему измерения временного интервала, пропорционального измеряемому уровню, и индикатор.
Основным недостатком данного устройства (прототипа) является достижение поставленной цели за счет сложного алгоритма обработки принятого сигнала, что, однако, не исключает снижения достоверности результатов измерения из-за изменчивости внешних факторов (установка одного датчика температуры не обеспечивает достоверности учета обычно неравномерного в вертикальной и горизонтальной плоскостях распределения температуры внутри резервуара). Другие недостатки связаны с установкой излучателя и приемника на одном уровне, что может приводить к необоснованному увеличению диаметра трубы, снижению энергетических показателей устройства и ограничению возможностей его применения.
Задачей настоящего изобретения является разработка устройства, обеспечивающего повышение точности и надежности измерения уровня жидкостей в резервуарах и лотках различных типов (открытых, закрытых, подземных), упрощение алгоритма формирования информационных сигналов, снижение влияния внешних помех, снижение энергоемкости, улучшение эксплуатационных параметров.
Согласно изобретению поставленная задача решена следующим образом. В устройство для измерения уровня жидких сред, содержащее измерительную трубу с акустическим излучателем зондирующего сигнала и первым приемником акустических сигналов, усилитель - формирователь зондирующего видеосигнала, усилитель - формирователь принятых сигналов, схему измерения временного интервала, функционально связанного с измеряемым уровнем, и индикатор, дополнительно введен второй приемник, акустических сигналов, расположенный ниже первого приемника на фиксированном расстоянии от него и выше максимально допустимого уровня жидкости для данного резервуара. Причем оба приемника установлены ниже уровня излучателя на наружной стенке измерительной трубы и связаны входами с ее полостью через согласующие трансформаторы, а выходами через усилитель - формирователь принятых сигналов подключены к сигнальному входу схемы измерения временного интервала, функционально связанного с измеряемым уровнем, выполненной в виде микропроцессора, реализующего заданную программу управления процессом измерения и вычисления усредненного значения измеряемого уровня жидкости lж в соответствии с исходными данными по формуле
где L - расстояние от второго приемника до дна резервуара; l0 - фиксированное расстояние между приемниками; N - количество последних отсчетов, по которым проводится усреднение результатов измерения уровня; txi - временной интервал между зондирующим и отраженным сигналами, принятыми вторым приемником в i - м измерении; toi - временной интервал между приемом зондирующего сигнала, принятого первым и вторым приемниками в i - м измерении; t'oi - временной интервал между приемом отраженного сигнала вторым и первым приемниками в i - м измерении. При этом первый выход микропроцессора, синхронизирующий, соединен с управляющим входом усилителя - формирователя зондирующих видеосигналов, к выходу которого подключен акустический излучатель, второй выход микропроцессора, информационный, соединен с входом индикатора измеряемого уровня, а третий выход служит для связи с внешними устройствами.
Поставленная задача в данном изобретении достигается следующим образом:
- введение второго приемника акустических сигналов, установленного ниже первого приемника, на фиксированном расстоянии от него, позволяет применить простой алгоритм формирования информационных сигналов, обеспечивает возможность использования части измерительной трубы, расположенной между первым и вторым приемниками, в качестве эталонного участка, необходимого для повышения точности измерений уровня;
- введение микропроцессора обеспечивает расширение функциональных возможностей устройства, возможность индивидуальной адаптации каждого устройства к условиям эксплуатации, повышения коммерческой точности измерений за счет текущего усреднения результатов измерений, подключение устройства к различным системам сбора и обработки данных;
- установка первого и второго приемников на наружной стенке измерительной трубы позволяет повысить надежность устройства за счет устранения интерференционных явлений внутри измерительной трубы, обеспечивает увеличение помехозащищенности устройства от внутренних и внешних помех, повышает технологичность устройства в процессе его изготовления и улучшает эксплуатационные характеристики.
Совокупность вышеизложенных признаков изобретения реализуется в формуле измерения уровня L = f(lж; txi; toi; t'oi), позволяющей существенно снизить систематическую погрешность, обусловленную погрешностью установки приемников и разбросом длины эталонного расстояния, а также снизить случайные погрешности в  раз.
раз.
Сущность изобретения поясняется чертежами, на которых изображено:
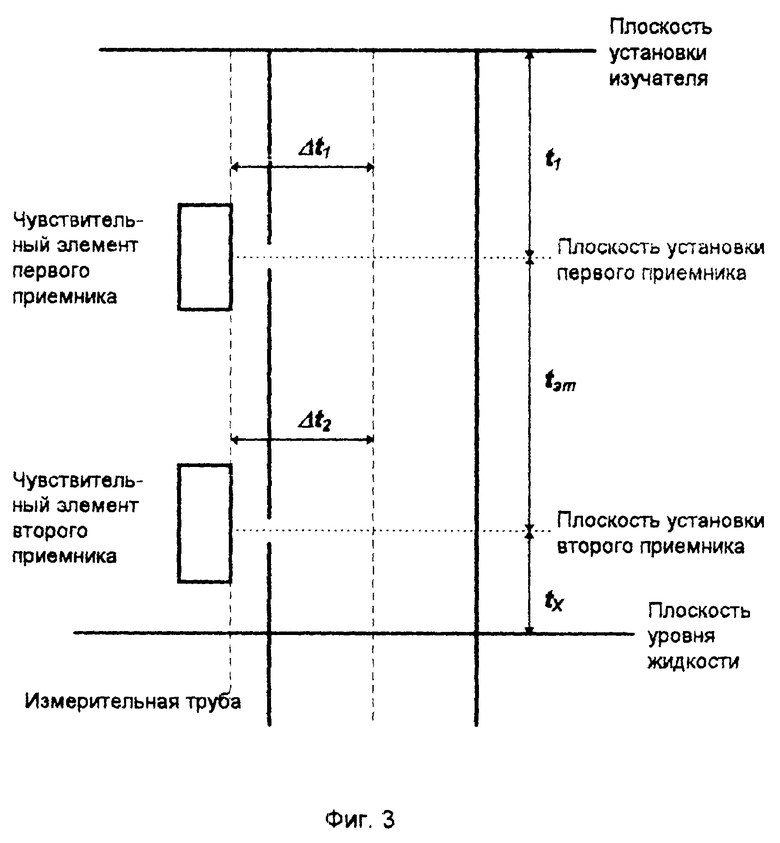
на фиг. 1 - блок-схема предлагаемого устройства для измерения уровня жидких сред;
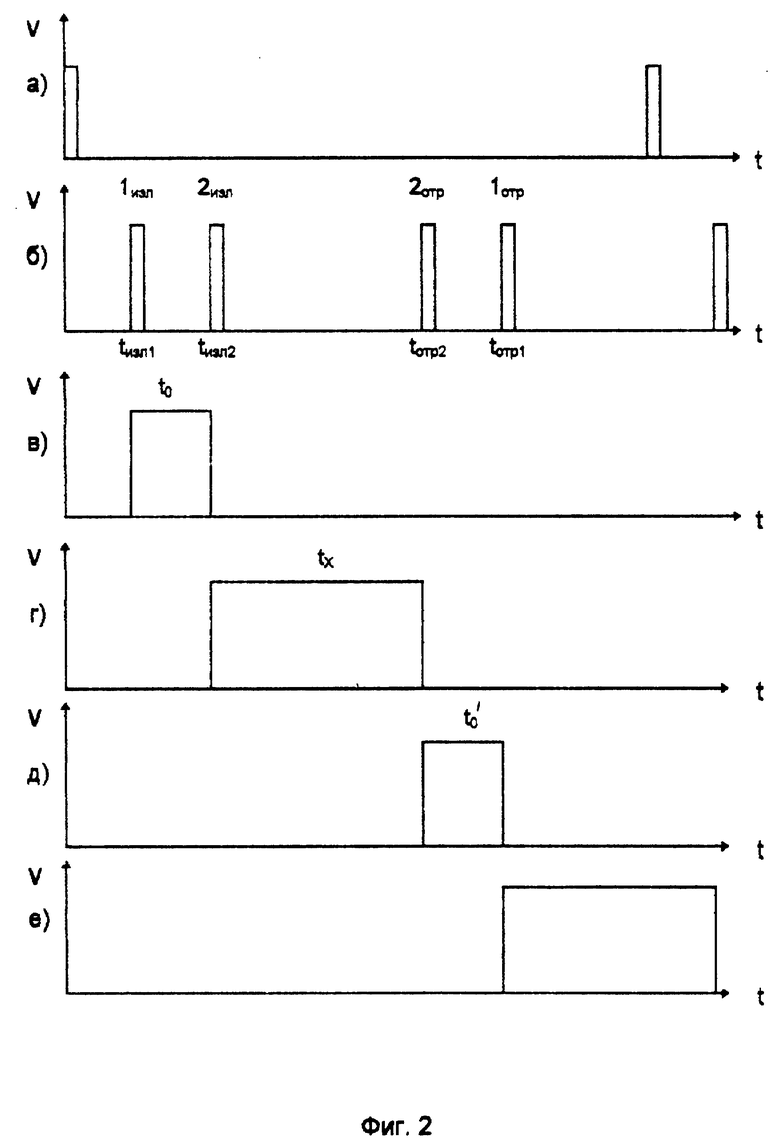
на фиг. 2 - временная диаграмма работы устройства;
на фиг. 3 - иллюстрация к устранению влияния погрешности установки приемников.
Предлагаемое устройство для измерения уровня жидкости в резервуаре (емкости) 1 содержит измерительную трубу 2, вертикально устанавливаемую в резервуар 1. В нижней части трубы 2 имеются отверстия 3 для поступления жидкости из емкости 1 в измерительную трубу 2, а в верхней части - вентиляционные отверстия 4 связи ее внутренней полости с атмосферой для устранения избыточного давления паров жидкости и достижения равномерного их распределения вдоль измерительной трубы 2. На верхнем конце измерительной трубы 2 установлен акустический излучатель 5. На наружной стенке трубы 2 установлены на фиксированном расстоянии друг от друга по высоте два приемника 6, 7 акустических сигналов, причем первый, верхний, приемник 6 расположен ниже уровня излучателя 5, а второй, нижний, приемник 7 расположен выше максимально допустимого уровня жидкости для данного резервуара 1. Входы приемников 6, 7 связаны с внутренним объемом трубы 2 с помощью согласующих трансформаторов 8, 9 (отверстий связи). Вторичная схема устройства содержит усилитель - формирователь 10 зондирующих видеосигналов, усилитель - формирователь 11 принятых сигналов, микропроцессор 12, реализующий заданную программу управления процессом измерения, вычисления усредненного значения измеряемого уровня в зависимости от назначения и исходных данных, управления индикатором 13 и связи с внешними устройствами. Выходы обоих приемников 6, 7 через усилитель - формирователь 11 принятых сигналов подключены к сигнальному входу микропроцессора 12, первый, синхронизирующий, выход которого подключен к управляющему входу усилителя - формирователя 10 зондирующих видеосигналов, соединенного своим выходом с акустическим излучателем 5. Второй выход микропроцессора 12, информационный, соединен с входом индикатора 13 измеряемого уровня. Третий выход микропроцессора 12 служит для связи с внешними устройствами, например ЭВМ и т.д.
Вычисления измеряемого уровня в микропроцессоре 12 осуществляется по формуле:
где L - расстояние от второго приемника 7 до дна резервуара 1; l0 - фиксированное расстояние между приемниками 6, 7; N - количество отсчетов, по которым проводится усреднение результатов измерения уровня; txi - временной интервал между зондирующим и отраженным сигналами, принятыми вторым приемником в i - м измерении; toi - временной интервал между приемом зондирующего импульса первым и вторым приемниками в i - м измерении; t'oi - временной интервал между приемом отраженного сигнала вторым и первым приемниками i - м измерении.
Предложенное устройство для измерения уровня жидких сред работает следующим образом.
Микропроцессор 12 вырабатывает сигнал (см. фиг. 2a) запуска усилителя - формирователя 10 зондирующего видеосигнала. Излучатель 5 излучает в измерительную трубу 2 зондирующий сигнал, который через трансформаторы связи 8, 9 в моменты времени tизл1 и tизл2 поступает на входы приемников 6, 7, где происходит преобразование в электрические сигналы Vизл1 и Vизл2 и усиление. С выхода приемников 6, 7 сигналы Vизл1 и Vизл2 поступают на вход усилителя - формирователя 11, где из каждого из них формируются (входные для микропроцессора 12) видеоимпульсы, условно представленные в виде видеоимпульсов 1изл и 2изл соответственно на фиг.2б.
Зондирующий сигнал, достигнув поверхности жидкости и отразившись от нее, вновь через трансформаторы 9, 8 связи в моменты времени tотр2 и tотр1 поступает на входы приемников 7, 6 соответственно, где принятые отраженные сигналы Vотр2 и Vотр1, аналогично зондирующим, после преобразования и усиления поступают на вход усилителя - формирователя 11, где из каждого из них также формируются входные видеоимпульсы микропроцессора 12, условно представленные в виде видеоимпульсов 2отр и 1отр соответственно на фиг.2б.
Видеоимпульсы 1изл; 2изл; 2отр и 1отр поступают на информационный вход микропроцессора 12, который производит измерение следующих временных интервалов:
- эталонного (первого), соответствующего временному интервалу t0 = tизл- tизл1 (см. фиг. 2в);
- измеряемого, соответствующего временному интервалу tx = tотр2 - tизл1 (см. фиг. 2г);
- эталонного (второго), соответствующего временному интервалу t'o = tотр1 - tотр2 (см. фиг. 2д).
После поступления четвертого импульса (см. импульс 1отр на фиг. 2в) на информационный вход микропроцессора 12 в нем запрещен прием какой-либо информации с этого входа до выработки следующего сигнала запуска. Сигнал запрета условно изображен на фиг. 2е.
В микропроцессоре 12 определяются длительности временных интервалов t0, tx, t'o и вычисляется уровень жидкости lж по формуле
где L - расстояние от второго приемника 7 до дна резервуара 1; l0 - фиксированное расстояние между первым и вторым приемниками 6, 7; N - количество отсчетов, по которым проводится усреднение результатов измерения уровня; txi - временной интервал между зондирующим и отраженным сигналами, принятыми вторым приемником в i - м измерении; toi - временной интервал между приемом зондирующего сигнала первым и вторым приемниками в i - м измерении; t'oi - временной интервал между приемом отраженного сигнала вторым и первым приемниками в i - м измерении.
Результат измерения со второго выхода микропроцессора 12 поступает на вход индикатора 13, а с третьего выхода - на вход внешних устройств, например ЭВМ, система сбора информации, управления и т.д.
Для уменьшения времени реакции на измерение уровня жидкости информация на индикатор выдается после каждого зондирующего импульса, а определение уровня по приведенной выше формуле проводится для N последних результатов измерения.
Предложенное устройство позволяет по измеренному уровню определять объем и массу жидкости в резервуаре по внесенным в ПЗУ процессора паспортным данным резервуара и плотности жидкости, а также определять текущий расход (приход) жидкости в резервуарах и лотках по заданному алгоритму "уровень - расход".
Повышение точности результатов измерений в данном устройстве достигается следующим образом:
- измеряемые временные интервалы toi, txi и t'oi связаны с соответствующими расстояниями между обоими приемниками и между вторым приемником и поверхностью жидкости известными выражениями:
toi = t'oi = l0 / Voi и txi = 2lx / Vxi,
где Voi и Vxi - величины скорости звука в измерительной трубе на ее участках между первым и вторым приемниками и между вторым приемником и уровнем жидкости в i - м измерении соответственно.
Наличие отверстий 4 в верхней части измерительной трубы 2 приводит к тому, что в ней устанавливается отношение скоростей звука Vxi / Voi, величина которого практически не зависит от внешних условий и близка к единице (в силу соизмеримости протяженностей участков lx и l0). В этом случае отношение
а значит, и расчетное выражение для определения уровня жидкости lж практически не зависит от внешних условий;
- при измерении суммарного эталонного временного интервала (to + t'o) для излученных и отраженных сигналов исключается погрешность установки обоих приемников, являющаяся источником систематической погрешности измерения уровня. Действительно, моменты появления сигналов на входах приемников можно представить следующим образом (см. фиг. 3):
tизл1= t1+Δt1;
tизл2= t1+tэт+Δt2;
tотр2= t1+tэт+tx+Δt2;
tотр1= t1+tэт+tx+tэт+Δt1.
где t1 - временной интервал прохождения сигнала от излучателя до плоскости расположения первого приемника; tэт - временной интервал происхождения сигналов от плоскости расположения первого приемника до плоскости расположения второго приемника; tx - временной интервал происхождения сигнала от плоскости расположения второго приемника до плоскости отражения жидкостью и обратно: Δt1 и Δt2 - временные интервалы прохождения сигналов от плоскости расположения первого и второго приемников до их входных устройств соответственно.
Измеряемые интервалы to и t'o определяются выражениями:
to= tизл2-tизл1= tэт+Δt2-Δt1;
а их сумма очевидным образом не зависит от расстояния между осевой линией измерительной трубы и чувствительным элементом каждого приемника, что помимо снижения систематической для каждого образца погрешности измерений улучшает технологичность устройства.
Повышение надежности измерений, снижение влияния внутренних и внешних помех, универсальность в данном устройстве достигается использованием звуковода, согласованного с излучателем, и установкой приемников на его наружной стенке, что полностью исключает возможность возникновения дополнительных переотраженных сигналов, а также позволяет снизить энергоемкость всего устройства.
Таким образом, предложенное устройство измерения уровня жидких сред обеспечивает повышение точности и надежности результатов измерения, сохраняет работоспособность в условиях внешних акустических помех, технологично и обладает пониженным энергопотреблением.
Кроме того, предложенное устройство обладает универсальностью за счет возможности использования в резервуарах и лотках различного назначения, в том числе с движущимися жидкостями, возможностью смены материала измерительной трубы (металл, пластмасса, стекло и т.д.) для различных типов жидкостей, возможностью индивидуальной перестройки исходных данных по месту установки устройства, а также определения объема, массы и расхода жидкости.
В настоящее время макет устройства по данному изобретению изготовлен и проверена его работоспособность в лабораторных и производственных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКИХ СРЕД | 1998 |
|
RU2143668C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЖИДКИХ ТОПЛИВ | 1999 |
|
RU2163373C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ | 2008 |
|
RU2364841C1 |
| СПОСОБ КОНТРОЛЯ УРОВНЯ ЖИДКОСТИ В РЕЗЕРВУАРАХ ПО ХАРАКТЕРИСТИКАМ ВОЛН ЛЭМБА И УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ УРОВНЯ ЖИДКОСТИ В РЕЗЕРВУАРАХ | 2020 |
|
RU2739562C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ | 2011 |
|
RU2454637C1 |
| СПОСОБ АКТИВНОГО ГАШЕНИЯ АКУСТИЧЕСКОГО ШУМА | 2008 |
|
RU2368017C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2432558C1 |
| Акустический профилемер подземных полостей, заполненных жидкостью | 1989 |
|
SU1786458A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2406979C2 |
Изобретение относится к нефтегазоперерабатывающей промышленности, водоснабжению. Устройство содержит измерительную трубу с акустическим излучателем зондирующего сигнала и двумя приемниками акустических сигналов, усилитель-формирователь зондирующих сигналов, усилитель-формирователь принятых сигналов, схему измерения временного интервала, функционально связанного с измеряемым уровнем, и индикатор. Второй приемник акустических сигналов расположен ниже первого приемника на фиксированном расстоянии от него и выше максимально допустимого уровня жидкости для данного резервуара. Оба приемника установлены ниже уровня излучателя на наружной стенке измерительной трубы и связаны входами с ее полостью через согласующие трансформаторы, а выходами через усилитель-формирователь принятых сигналов подключены к сигнальному входу схемы измерения временного интервала, функционально связанного с измеряемым уровнем, выполненной на микропроцессоре, реализующем заданную программу управления процессом измерения, вычисления усредненного значения измеряемого уровня жидкости в соответствии с назначением и исходными данными по приводимой формуле. Первый выход микропроцессора подключен к управляющему входу усилителя-формирователя зондирующих видеосигналов, второй выход соединен с входом цифрового индикатора измеряемого уровня, а третий выход служит для связи с внешними устройствами. Обеспечена высокая точность, надежность измерения уровня жидкости в резервуарах и лотках различных типов, простота конструкции, малая энергоемкость и высокие эксплуатационные характеристики, снижено влияние внешних помех. 3 ил.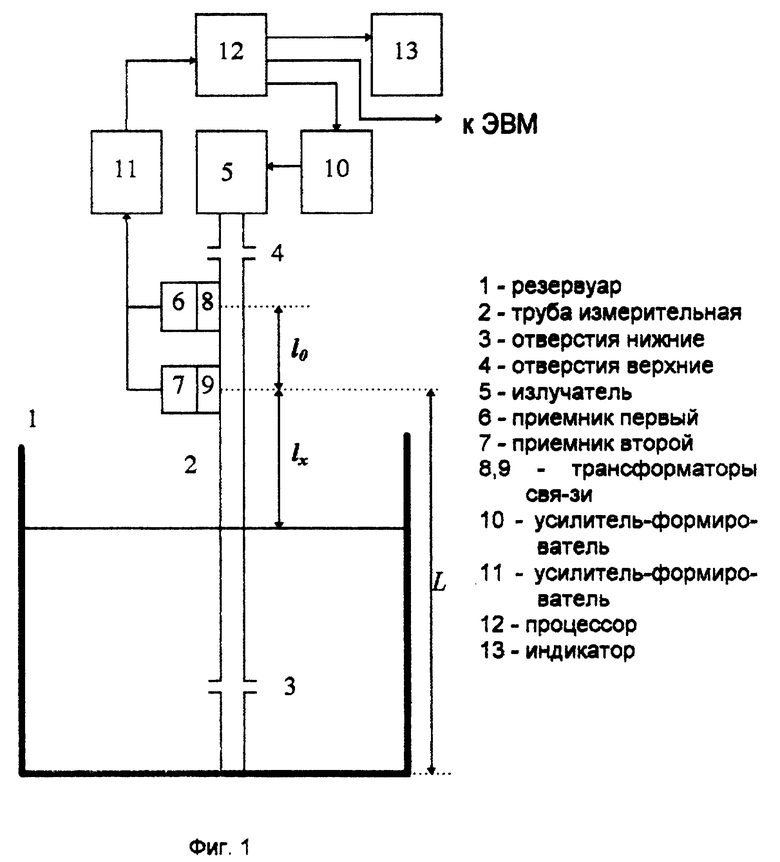
Устройство для измерения уровня жидких сред, содержащее измерительную трубу с акустическим излучателем зондирующего сигнала и первым приемником акустических сигналов, усилитель-формирователь зондирующих сигналов, усилитель-формирователь принятых сигналов, схему измерения временного интервала, функционально связанного с измеряемым уровнем, и индикатор, отличающееся тем, что в него введен второй приемник акустических сигналов, расположенный ниже первого приемника на фиксированном расстоянии от него и выше максимально допустимого уровня жидкости для данного резервуара, причем оба приемника установлены ниже уровня излучателя на наружной стенке измерительной трубы и связаны входами с ее полостью через согласующие трансформаторы, а выходами через усилитель-формирователь принятых сигналов подключены к сигнальному входу схемы измерения временного интервала, функционально связанного с измеряемым уровнем, выполненной на микропроцессоре, реализующем заданную программу управления процессом измерения и вычисления усредненного значения измеряемого уровня жидкости lж в соответствии с назначением и исходными данными по формуле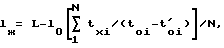
где L - расстояние от второго приемника до дна резервуара;
l0 - фиксированное расстояние между обоими приемниками;
N - количество последних отсчетов, по которым проводится усреднение результатов измерения уровня;
txi - временной интервал между зондирующим и отраженным сигналами, принятыми вторым приемником в i-м измерении;
toi - временной интервал между приемом зондирующего сигнала первым и вторым приемниками в i-м измерении;
toi ' - временной интервал между приемом отраженного сигнала вторым и первым приемниками в i-м измерении,
при этом первый выход микропроцессора, синхронизирующий, соединен с управляющим входом усилителя-формирователя зондирующих видеосигналов, к выходу которого подключен акустический излучатель, второй выход микропроцессора, информационный, соединен с входом индикатора измеряемого уровня, а третий выход служит для связи с внешними устройствами.
| Акустический уровнемер | 1988 |
|
SU1615559A1 |
| US 5471872 A, 07.03.1991 | |||
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРИВОДА ПОДАЧ МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 2006 |
|
RU2312749C2 |
