Изобретение относится к области навигации, а более конкретно к определению координат преимущественно подводных аппаратов для позиционирования подводных объектов при обследовании морских объектов хозяйственной деятельности.
Известна гидроакустическая синхронная дальномерная навигационная система (патент RU №2032787 [1], содержащая донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, М-канальный приемник, М измерителей времени распространения гидроакустических сигналов до приемоответчиков и обратно, M·N блоков преобразования временных интервалов в дистанции по N в каждом из каналов из М, М блоков выбора максимального значения дистанции из N значений и вычислитель координат объекта навигации, в котором каждый из М каналов введены по числу лучевых траекторий N-1 дополнительных измерителей времени распространения гидроакустических сигналов, N-1 мультивибраторов задержки, N-1 мультивибраторов строб-импульса, N-1 селекторов, причем первые входы N-1 измерителей распространения соединены с выходом генератора синхроимпульсов, вторые входы соединены с первыми выходами соответствующих селекторов, а выходы соединены с M·N входами блока преобразования временных интервалов в дистанции, первый вход каждого из селекторов соединен с выходом соответствующего мультивибратора строб-импульса, второй вход соединен с выходом соответствующего канала приемника, вход первого мультивибратора задержки соединен с выходом соответствующего канала приемника, а выход каждого последующего мультивибратора задержки соединен с вторым выходом соответствующего селектора, в каждый из М каналов введены N(N-1) дополнительных блоков преобразования временных интервалов в дистанции, N-1 дополнительных блоков выбора максимального значения дистанции и усреднитель дистанции, причем входы каждого из N-1 наборов по N блоков преобразования временных интервалов в дистанции соединены с соответствующими выходами N-1 дополнительных измерителей временных интервалов, а выходы соединены с входами N-1 дополнительных блоков выбора максимального значения, выходы всех блоков выбора максимального значения дистанции соединены с N входами усреднителя дистанций, а выход усреднителя дистанций соединен с входом вычислителя координат объекта навигации.
В данной системе реализован способ навигации подводного объекта, включающий размещение гидроакустических ответчиков на дне водоема, создание навигационной базы из М гидроакустических приемоответчиков с различными частотами ответа, калибровку с помощью внешних средств обеспечения навигационной базы, посредством гидроакустического передатчика, размещенного на подводном объекте, измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками. Для получения достоверных результатов измерений измеренные дистанции усредняют. Навигационная база таких систем, предварительно устанавливаемая на дне акватории, как правило, состоит из 12-16 маяков-ответчиков и предварительно калибруется в относительных и в географических координатах (относительная и абсолютная калибровки) с помощью судна обеспечения, оснащенного бортовым комплексом спутниковой и гидроакустической системы навигации. После выработки своего энергетического ресурса маяки-ответчики заменяются, при этом производится новая калибровка донной навигационной базы. Данный способ позволяет обеспечить географическую привязку подводного аппарата в пределах площади до 100 квадратных километров и протяженностью до 50 километров.
Использование известного способа навигации подводных аппаратов требует значительных затрат судового времени при замене выработавших свой ресурс маяков-ответчиков. При проведении научно-исследовательских работ с применением автономных подводных обитаемых аппаратов, выполнении оперативно-тактических задач подводными аппаратами на морских полигонах протяженностью до тысяч километров и площадью десятки тысяч квадратных километров особое значение приобретает оперативное высоконадежное обеспечение этих работ без использования судна обеспечения.
Наиболее близкими по своей сути к заявляемому объекту техники являются устройства, приведенные в патентных описаниях (патент RU №2289149 [2] и авторское свидетельство SU №713278 [3]) и в источнике [4].
Известна гидроакустическая синхронная дальномерная навигационная система [3], состоящая из базы гидроакустических приемоответчиков, служащих для измерения времени распространения акустических сигналов от объекта навигации до маяков, устройства вычисления дистанции по измеренному времени распространения и известной скорости звука, и устройства вычисления координат объекта навигации по найденным значениям дистанций.
Недостатком такой системы является большая погрешность определения координат, связанная с изменчивостью скорости звука в морской среде.
Известна также гидроакустическая синхронная дальномерная навигационная система [4], содержащая донную базу из М гидроакустических приемоответчиков с различными частотами ответа, размещенные на объекте навигации, передатчик, вход которого соединен с первым выходом генератора синхроимпульсов, М-канальный приемник, выходы которого подключены к входам М измерителей времени распространения гидроакустических сигналов до соответствующего приемоответчика и обратно, вторые входы которых соединены с вторым выходом генератора синхроимпульсов, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых подключены к соответствующим выходам измерителей времени распространения, М блоков выбора максимального значения, входы которых соединены с выходами N блоков каждого из М каналов преобразования временных интервалов в дистанции, вычислитель координат объекта навигации, вход которого соединен с выходами М блоков выбора максимального значения.
Наличие в структуре навигационной системы блоков преобразования временных интервалов в дистанции, работающих по алгоритму, учитывающему изменчивость скорости звука и эффекты многолучевости, позволяет снизить погрешность определения координат. Такая система по технической сущности является наиболее близкой к предлагаемому изобретению.
Недостатком указанной навигационной системы является относительно малая дальность действия при работе объекта навигации вблизи дна и при использовании донных маяков-ответчиков, которая связана с эффектами рефракции звука вблизи дна.
В основу технического решения [2] положена задача разработки гидроакустической синхронной навигационной системы с большей дальностью действия без увеличения погрешности определения координат объекта навигации.
Поставленная задача известным устройством [2] решается тем, что в состав гидроакустической синхронной дальномерной навигационной системы дальнего действия, содержащей донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа fm (m=1-M), размещенные на объекте навигации генератор синхроимпульсов, акустический передатчик с частотой опроса f0, вход которого соединен с первым выходом генератора синхроимпульсов. М-канальный приемник для приема ответных сигналов с частотами fm, М измерителей времени распространения акустических сигналов до приемоответчика, работающего на частоте этого канала, и обратно, первые входы которых соединены с выходами М канального приемника, а вторые входы соединены с вторым выходом генератора синхроимпульсов, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, М блоков выбора максимального значения дистанции, входы которых соединены с выходами N блоков преобразования временных интервалов в дистанции данного канала, вычислитель координат объекта навигации, первый вход которого соединен с выходами М блоков выбора максимального значения дистанций, введены дополнительно вторая донная навигационная база из М гидроакустических маяков-пингеров с различными частотами излучения Fm (m=1-M), механически связанных с соответствующими М маяками-ответчиками, содержащих М синхронно работающих генераторов синхроимпульсов, М передатчиков с различными рабочими частотами Fm, входы которых соединены с выходами генераторов синхроимпульсов, М гидроакустических излучателей с рабочими частотами Fm, входы которых соединены с выходами передатчиков с соответствующими рабочими частотами.
Кроме того, на объекте навигации дополнительно размещены второй генератор синхроимпульсов, работающий синхронно с генераторами синхроимпульсов маяков-пингеров, первый выход которого используется для синхронизации М синхронно работающих генераторов синхроимпульсов гидроакустических маяков-пингеров перед их установкой на дно, буксируемая приемная акустическая антенна, второй М канальный приемник для приема акустических сигналов маяков-пингеров, вход которого соединен с выходом буксируемой приемной акустической антенны, М измерителей времени распространения акустических сигналов от маяков-пингеров до объекта навигации, первые входы которых соединены с выходами второго М канального приемника, а вторые входы соединены со вторым выходом второго генератора синхроимпульсов, дополнительные М блоков преобразования временных интервалов в дистанции, входы которых соединены с выходами М измерителей времени распространения акустических сигналов от маяков-пингеров до объекта навигации, а выходы соединены со вторыми входами вычислителя координат объекта навигации, причем М гидроакустических излучателей маяков-пингеров и буксируемая приемная акустическая антенна расположены вблизи морского дна на расстоянии не более длины волны на рабочих частотах Fm, а дополнительные М блоков преобразования временных интервалов в дистанции вычисляют искомые расстояния rm через измеренные времена распространения tm по известной формуле с учетом скорости распространения придонной волны, предварительно вычисленной через параметры пограничных сред границы раздела вода - морское дно по известной формуле с учетом плотности и скорости звука в придонном слое воды и плотности и скорости звука в осадочном слое морского дна [2].
Существенным недостатками известной гидроакустической синхронной дальномерной навигационной системы дальнего действия [2] является то, что получение координат подводного объекта отягощено многочисленными и трудоемкими вычислениями, обусловленными учетом скорости распространения придонной волны, плотности и скорости звука. При проведении исследований в районах со сложным рельефом эффективность вычислений может привести к обратному результату, т.е. к проявлению дополнительной погрешности в итоговых результатах определения координат подводного объекта. Кроме того, с учетом того, что донная навигационная база расположена на дне, а приемник акустических сигналов находится на подводном объекте, т.е. на разных горизонтах по глубине, то в вычисления также необходимо вводить поправочные коэффициенты.
Кроме того, формирование двух донных баз из маяков-ответчиков требует размещения большого количества активных маяков-ответчиков, автономный энергоресурс которых весьма ограничен.
Задачей заявляемого технического решения является сокращение трудоемкости определения координат подводных объектов.
Поставленная задача решается за счет того, что в гидроакустической навигационной системе, содержащей донную навигационную базу из М ответчиков с различными частотами ответа fm, размещенные на объекте навигации акустический передатчик с частотой опроса f0, М-канальный приемник для приема ответных сигналов с частотами fm, M измерителей времени распространения акустических сигналов до ответчика, работающего на частоте этого канала, и обратно, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, вычислитель координат объекта навигации, дополнительную вторую донную навигационную базу из М ответчиков с различными частотами излучения Fm (m=1-M), механически связанных с соответствующими М ответчиками, при определении координат навигационного объекта учитывают скорость распространения звука в воде в отличие от аналогов и прототипа, ответчики первой и второй навигационных баз сформированы из ответчиков, выполненных в форме сферических поверхностей, причем ответчики первой навигационной базы выполнены из акустически жестких материалов, а ответчики второй базы выполнены из акустически мягких материалов, в точках, формирующих вторую навигационную базу, маяки размещены группами на расстояниях от соответствующего одиночного маяка, меньше длительности зондирующего импульса акустического передатчика, акустический передатчик излучает сигнал в сторону ответчиков с линейной частотной модуляцией, объект навигации снабжен датчиком измерения скорости звука в воде, установленным на горизонте глубины акустического передатчика.
В заявленной гидроакустической навигационной системе общими существенными признаками для нее и для ее прототипа являются:
- гидроакустическая навигационная система, содержащая донную навигационную базу из М ответчиков с различными частотами ответа fm (m=1-M);
- размещенные на объекте навигации акустический передатчик с частотой опроса f0;
- М канальный приемник для приема ответных сигналов с частотами fm;
- М измерителей времени распространения акустических сигналов до ответчика, работающего на частоте этого канала, и обратно;
- M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения;
- вычислитель координат объекта навигации;
- вторая донная навигационная база из М ответчиков с различными частотами излучения Fm (m=1-M), механически связанных с соответствующими М ответчиками;
- при определении координат навигационного объекта учитывают скорость распространения звука в воде.
Сопоставительный анализ существенных признаков заявленной гидроакустической системы и прототипа показывает, что первая в отличие от прототипа имеет следующие отличительные признаки:
- ответчики первой и второй навигационных баз сформированы из ответчиков, выполненных в форме сферических поверхностей;
- ответчики первой навигационной базы выполнены из акустически жестких материалов, а ответчики второй базы выполнены из акустически мягких материалов;
- в точках, формирующих вторую навигационную базу, маяки размещены группами на расстояниях от соответствующего одиночного маяка, меньше длительности зондирующего импульса акустического передатчика;
- акустический передатчик излучает сигнал в сторону ответчиков с линейной частотной модуляцией;
- объект навигации снабжен датчиком измерения скорости звука в воде, установленным на горизонте глубины акустического передатчика.
Совокупность новых отличительных признаков заявляемого объекта техники обеспечивает получение технического результата, заключающегося в сокращении трудоемкости определения координат подводных объектов, за счет того, что ответчики первой и второй навигационных баз сформированы из ответчиков, выполненных в форме сферических поверхностей, ответчики первой навигационной базы выполнены из акустически жестких материалов, а ответчики второй базы выполнены из акустически мягких материалов, в точках, формирующих вторую навигационную базу, маяки размещены группами на расстояниях от соответствующего одиночного маяка, меньше длительности зондирующего импульса акустического передатчика, акустический передатчик излучает сигнал в сторону ответчиков с линейной частотной модуляцией, объект навигации снабжен датчиком измерения скорости звука в воде, установленным на горизонте глубины акустического передатчика.
Сущность заявляемого технического решения поясняется чертежами.
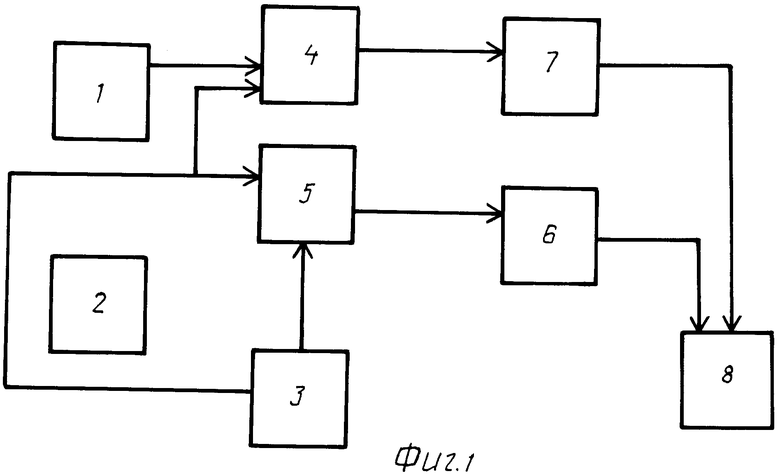
Фиг.1. Акустический передатчик
Излучающий тракт работает на принципе нелинейного взаимодействия акустических волн. Формирование исходных электрических сигналов осуществляется по двух канальной схеме. Сигналы с генераторов 1, 2 поступают на импульсные модуляторы 4, 5, которые управляются импульсным генератором 3. Затем радиоимпульсы усиливаются усилителями мощности 6, 7 и излучаются в воду преобразователями накачки 8. Преобразователь накачки 8 представляет собой 28-ми элементную мозаичную антенную решетку, состоящую из пьезокерамических элементов прямоугольной формы, образующих два набора с различными резонансными частотами. Излучающая поверхность преобразователя накачки 8 имеет форму квадрата со стороной 75 мм.
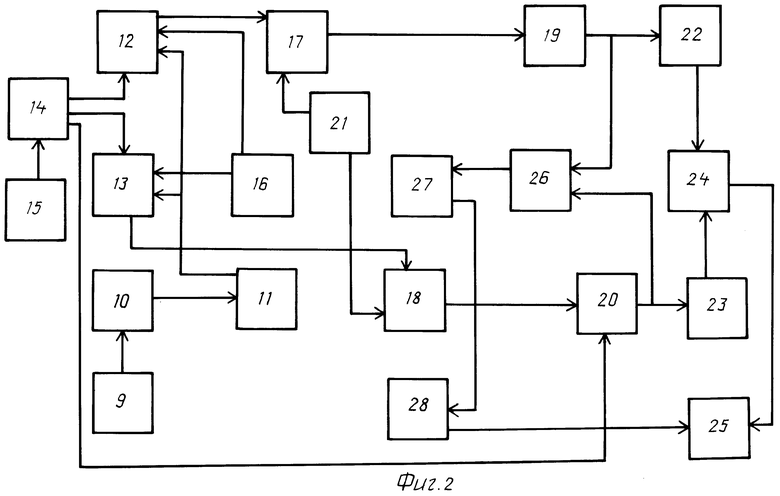
Фиг.2. Измерительный приемник
Измерительный приемник представляет собой двухканальное усилительное устройство, снабженное фильтром, стробирующим и решающим устройствами. Принятые гидрофоном 9 прямые (излученные антенной) и отраженные пассивным ответчиком сигналы поступают на входной фильтр нижних частот 10, который исключает попадание высокочастотных составляющих сигналов накачки в последующие каскады. Прошедшие через фильтр нижних частот сигналы разностной частоты усиливаются предварительным усилителем 11 и поступают на входы основных усилителей прямого 12 и отраженного 13 сигналов, в которых осуществляется временная селекция прямого и отраженного сигналов и усиление их до необходимых уровней. Работой стробирующих каскадов основных усилителей управляет импульсное устройство 14, которое формирует временные ворота для прямого и отраженного сигналов. Синхронизация импульсного устройства осуществляется формирователем 15. Установка коэффициентов усиления основных усилителей осуществляется кодом, формируемым в блоке управления 16. С выходов основных усилителей через полосовые фильтры 17 и 18 с регулируемой полосой пропускания сигналы с каналов для прямого и отраженного сигналов поступают на пиковые детекторы 19, 20. Регулировка полосы пропускания путем коммутации фильтров верхних и нижних частот по обоим каналам осуществляется блоком управления 21 фильтров. Пиковые детекторы фиксируют уровни напряжения прямого и отраженного сигналов, величины которых логарифмируются логарифмическими усилителями 22, 23 и поступают на вычитающее устройство 24. С вычитающего устройства 24 постоянное напряжение, пропорциональное разности между уровнями прямого и отраженного сигналов, поступает на решающее устройство 25. Импульсное устройство 14 перед приемом каждой следующей посылки вырабатывает импульс сброса и очищает память пиковых детекторов 19, 20. Для анализа прямого и отраженного сигналов одновременно или поочередно сигналы с выходов каналов прямого и отраженного сигналов, а также с выходов пиковых детекторов 19, 20 через коммутатор 26 поступают на сумматор 27, к выходу которого подключен регистратор 28. Измерительный приемник работает в диапазоне частот 5-50 кГц. Уровень шумов, приведенный ко входу по обоим каналам в полосе частот 5-50 кГц, не превышает 5 мкВ. Коэффициент усиления каждого канала изменяется в пределах 12-72 дБ. Фильтрами обеспечивается подавление высокочастотных сигналов накачки выше 100 кГц не мене 80 дБ.
Фильтр нижних частот 10 имеет частоты среза фильтра верхних частот 0,2; 2,5; 5; 10 кГц.
Максимальная амплитуда входного сигнала в диапазоне рабочих частот составляет не более 1 В.
В качестве приемной антенны используется набранное из пьезокерамических широкополосных приемников кольцо вокруг преобразователя накачки либо расположенная таким же образом звукоприемная антенна из электретного кабеля.
Фиг.3, фиг.4, фиг.5, фиг.6 и фиг.7 - иллюстрация теоретических и экспериментальных исследований.
Предлагаемый способ основан на методах формирования широкополосных параметрических антенн гидроакустических излучателей для исследования частотных характеристик подводных объектов для выявления их классификационных признаков.
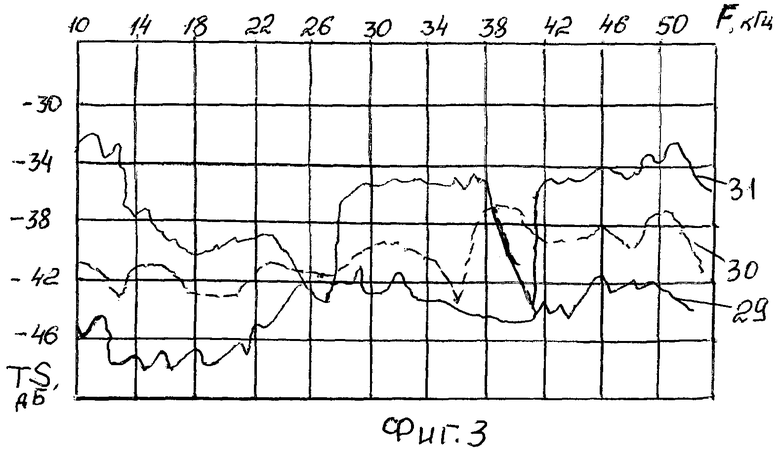
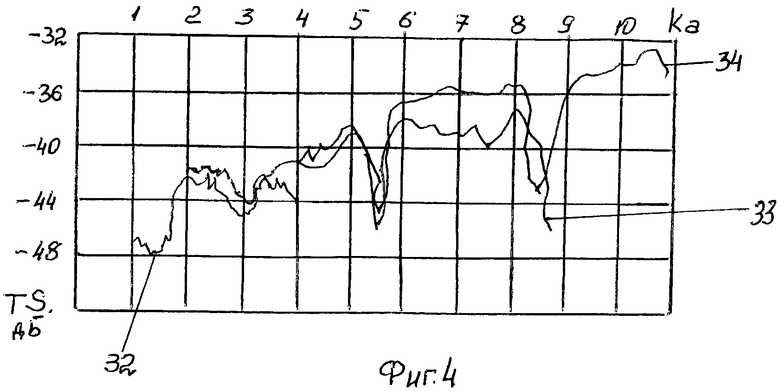
Для оценки влияния размеров исследуемых сфер на частотные зависимости силы цели были проведены измерения для трех сплошных сфер из стали диаметром 38, 76 и 100 мм соответственно. Результаты измерений силы цели представлены на фиг.3. Кривые 29, 30, 31 соответствуют зависимостям от частоты силы цели сфер диаметром 38, 76 и 100 мм. Сравнивая эти зависимости, можно отметить, что общим для них является чередование максимумов и минимумов, что характерно для 1<ka<10. Однако характер этих чередований, а также абсолютные значения силы цели и интервал частот между минимальными и максимальными значениями силы цели в данном диапазоне частот являются различными. Этот факт позволяет, например, различать эти объекты по их частотным характеристикам, а также оценивать размер этих сфер по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях по известной методике (Клей К., Медвин Г. Акустическая океанография. Основы и применения. - М.: Мир, 1980. - 580 с.). Размеры исследуемых сфер, вычисленные по частотным характеристикам по известной методике, составили 26, 73 и 80 мм для сфер диаметром 38, 76 и 100 мм соответственно. Как видно, оценка является достаточно приблизительной. Однако в некоторых практических случаях такой оценки размера объекта в совокупности с учетом абсолютной величины силы цели может оказаться вполне достаточным для того, чтобы различать объекты по их габаритам, и на основании этого принимать решения о принадлежности к тому или иному классу. Величина силы цели сферических тел часто рассматривается в зависимости от произведения ka. Такие характеристики позволяют оценить изменение отражательной способности сферы в зависимости от ее размеров или от частоты сигнала. На фиг.4 представлены графики зависимости силы цели от произведения ka для стальных сфер диаметром 38 мм (кривая 32), 76 мм (кривая 33) и 100 мм (кривая 34). Характеристики, полученные при использовании сфер разных диаметров, достаточно хорошо согласуются между собой при одинаковых значениях ka. Это еще раз подтверждает достаточную точность метода измерений. Кроме того, хорошее совпадение кривых свидетельствует о том, что характер частотных зависимостей силы цели обусловлен не просто диаметром сферы или длиной излучаемой волны, а однозначно определяется соотношением частоты и размера исследуемого акустического жесткого сферического тела.
Минимумы в частотных зависимостях силы цели обусловлены интерференцией между различными типами волн, участвующими в процессе формирования отраженного от сферы сигнала. Интерференция вызывает искажения формы отраженного импульса на соответствующих частотах, что в некоторых случаях по характеру искажений формы отраженного сигнала позволяет судить о материале и размерах объекта.
Исследования формы эхо-сигналов проводились путем теоретических расчетов и экспериментальных измерений.
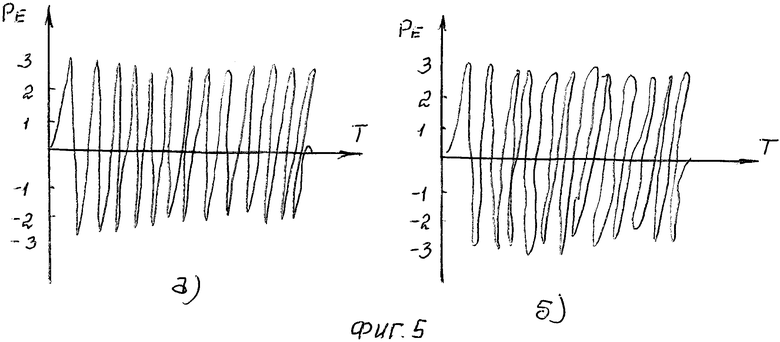
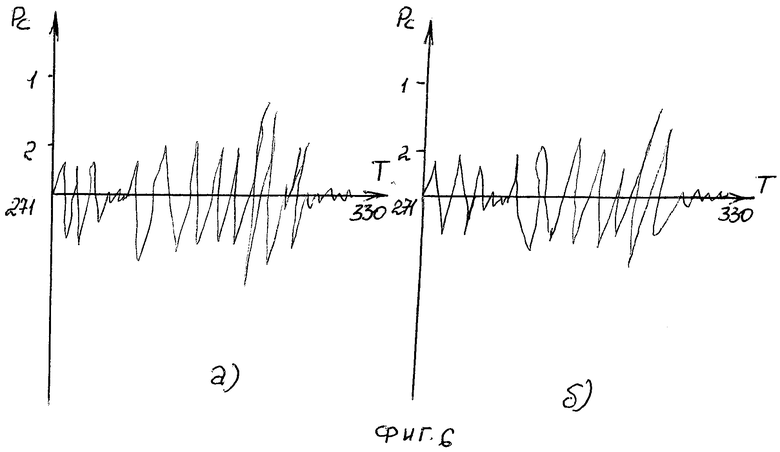
Теоретическая задача рассеивания звука на акустической жесткой упругой сфере, находящейся за областью эффективного нелинейного взаимодействия волн, решалась в соответствии с методикой (У.К. Метсавээр Я.А., Векслер Н.Д., Кутсер М.Э. Эхо-сигналы от упругих объектов. - Таллин: Академия наук ЭССР, 1974. - 214 с.). По полученным выражениям производились вычисления эхо-сигналов от сплошных упругих сфер. Параметры зондирующего сигнала и параметры сфер выбирались соответствующими данным, которые использовались при проведении экспериментальных измерений. На фиг.5 и фиг.6 представлены результаты расчетов (фиг.5а, фиг.6а) и экспериментальных измерений (фиг.5б, фиг.6б) эхо-сигналов от сплошной медной сферы диаметром 60 мм с физическими параметрами с физическими параметрами Е=12,5 кг/см2; ν=0,35; ρ=8,9 г/см3, где Е - модуль Юнга, ν - коэффициент Пуассона, ρ - плотность материала. Длительность зондирующего импульса составляла τ=0,6 мс, частота заполнения  и
и  . Уровень звукового давления зондирующего сигнала составлял 2000 Па. В результате расчетов получены временные диаграммы эхо-сигналов, амплитуда которых РЕ и время Т представлены в относительных единицах. Переход от безразмерных параметров РЕ, Т, которые используются при вычислениях, осуществлялся по формулам Р=РЕ·Р*·α и t=TR, где Р* - величина давления в падающем сигнале в Па; Р - величина давления в отраженном сигнале в Па; α=Δх/2π; Δх - шаг интегрирования, t - время в с; с - скорость звука в воде; R - радиус сферы.
. Уровень звукового давления зондирующего сигнала составлял 2000 Па. В результате расчетов получены временные диаграммы эхо-сигналов, амплитуда которых РЕ и время Т представлены в относительных единицах. Переход от безразмерных параметров РЕ, Т, которые используются при вычислениях, осуществлялся по формулам Р=РЕ·Р*·α и t=TR, где Р* - величина давления в падающем сигнале в Па; Р - величина давления в отраженном сигнале в Па; α=Δх/2π; Δх - шаг интегрирования, t - время в с; с - скорость звука в воде; R - радиус сферы.
Величина давления в отраженном сигнале, полученным экспериментальным путем, определялась по формуле Р=Uo/Кпγ, где Uo - напряжение на осциллографе; Кп - коэффициент передачи приемного тракта; γ - чувствительность измерительного гидрофона.
Сопоставление сигналов, полученных расчетным и экспериментальным путем (фиг.4 и фиг.5), позволяет сделать вывод о том, что формы огибающих приведенных сигналов достаточно хорошо совпадают и незначительные различия в амплитудах находятся в пределах измерений.
Искажения формы огибающих отраженных сигналов по отношению к падающим сигналам (последние имели прямоугольную форму огибающей) вызвано интерференцией различных типов волн, участвующих в формировании отраженного сигнала.
Степень влияния на результирующую огибающую отраженного сигнала тех или иных типов волн зависит от размеров материала объекта, а также частоты заполнения зондирующего импульса. Это позволяет исследовать с достаточной степенью точности (как показывает сравнение численных результатов с экспериментальными) звуковые поля отражающих объектов в однородной среде, в случаях, когда можно пренебречь эффектом нелинейного взаимодействия отраженных от объекта волн накачки. Эти случаи включают в себя случай рассеяния от тел, расположенных в однородной среде, обладающих значительным поглощением для волн накачки, например в водонасыщенном однородном иле.
В последующем были исследованы формы эхо-сигналов отраженных импульсов от сфер различных диаметров и изготовленных из разных материалов. В ходе исследований было установлено, что для сфер, изготовленных из одного типа материалов, форма отраженного сигнала зависит от соотношения между диаметром сферы и длиной волны. Подобные искажения формы отраженных импульсов характерны для однородных сфер, изготовленных из других металлов.
В случае использования сфер из акустически мягкого материала, например пенопласта или наполненной воздухом сферы с тонкой стенкой, форма отраженных импульсов в местах минимумов на частотных зависимостях силы цели отличается от формы импульса, отраженного от сплошной сферы.
Этот факт позволяет по форме, огибающей эхо-сигнал, отличать сферы, выполненные из акустически жестких и мягких материалов.
Для оценки влияния материала объекта на частотные зависимости цели сравнивались частотные зависимости для сфер равных размеров, выполненных из различных материалов (сталь, медь, алюминий, пенопласт), как полых, так и полностью изготовленных из однородного материала.
Анализ этих зависимостей показывает, что сходство, наблюдаемое в одинаковом частотном интервале между минимальными значениями в частотных зависимостях силы цели, обусловлено одинаковыми геометрическими размерами, и различие в материале сфер не оказывает существенного влияния на формирование этих зависимостей. Отличаются зависимости между собой крутизной переходов между экстремальными значениями силы цели, а также абсолютными значениями силы цели на одинаковых частотах.
Более существенное различие в частотных зависимостях наблюдаются между стальной сферой и сферой, выполненной из пенопласта. Разница в зависимостях обусловлена, в основном, значительными отличиями акустических свойств материалов, из которых изготовлены эти сферы.
Это позволяет отличать по частотным зависимостям силы цели сферы одинакового размера, изготовленные из акустически мягких материалов, от сфер, изготовленных из акустически жестких материалов.
Для оценки различий в частотных зависимостях однородных и полых сфер были измерены частотные зависимости силы цели полых сфер.
Результаты измерений показывают, что полые сферы имеют более сложный характер зависимости силы цели. Характерным отличием полых сфер от однородных является отсутствие регулярности минимумов в частотных характеристиках, которые для сплошных металлических сфер являются типичными.
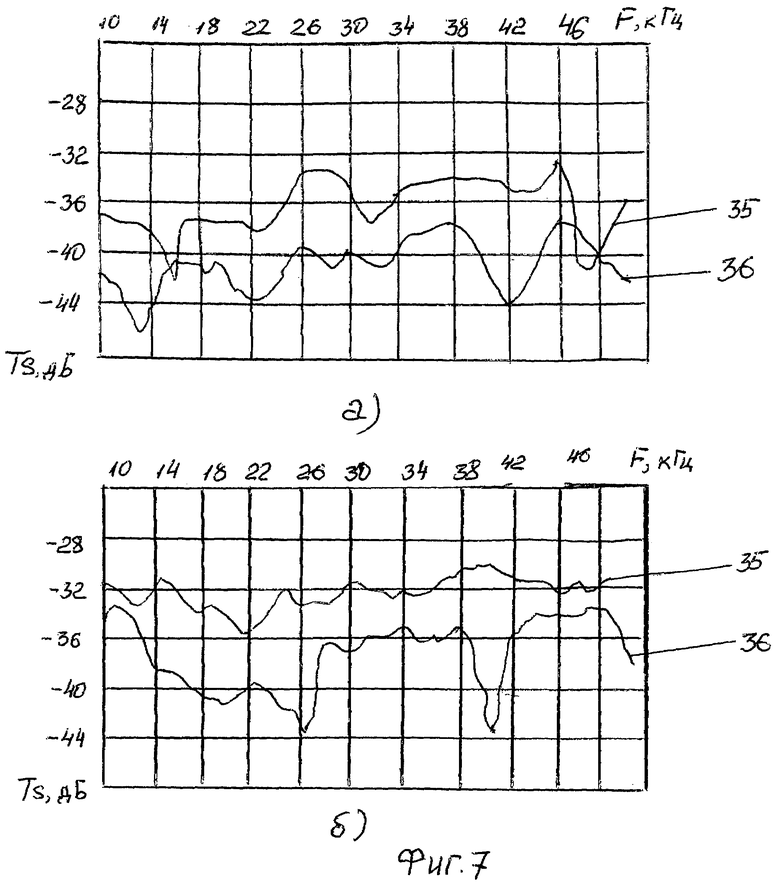
Достаточно сложным вопросом является задача распознавания групповой цели при расстояниях между элементами этой цели, меньшими длительности зондирующего импульса. Одним из способов, позволяющих отличать одиночную цель от групповой, может являться изучение частотной характеристики отраженного сигнала. При отражении от нескольких целей, находящихся в пределах длительности импульса, сигнал будет являться результатом интерференции отраженных сигналов от всех целей. Изменение частоты при этом будет изменять их фазовые соотношения, что скажется на результирующем отраженном сигнале и приведет к осцилляциям частотной зависимости силы цели. Подтверждением этому могут служить результаты эксперимента, в котором измерялась частотная зависимость величины отраженного сигнала для двух сплошных сфер, расположенных одна над другой на расстоянии 25 см друг от друга. Длительность импульса при проведении эксперимента составляла τ=1 мс. Результаты эксперимента приведены на фиг.7, на которой представлена частотная зависимость падающего сигнала (кривая 35) и частотная зависимость отраженного сигнала (кривая 36). Чередования минимумов и максимумов на кривой 36, характеризующей частотную зависимость величины отраженного сигнала, имеет строгую периодичность. Величина периодов зависит от расстояния между сферами. Такая сложная зависимость силы цели является результатом интерференции сигналов, отраженных от первой и второй сфер. Таким образом, по характеру частотной зависимости амплитуды отраженного сигнала можно различать одиночную или групповые цели.
Полученные частотные зависимости были получены при медленном изменении частоты зондирующих импульсов от импульса к импульсу. Широкополосность параметрических антенн позволяет излучать широкополосные сигналы, которые дают возможность определить частотные свойства отраженных объектов за один цикл излучения-приема. При экспериментах с использованием медной сплошной сферы диаметром 60 мм излучался сигнал с линейной частотной модуляцией (ЛЧМ). При сравнении с отраженным сигналом девиации разностной частоты составляла 5-52 кГц длительностью излученного импульса 2 мс. Сравнение частотной зависимости силы цели для аналогичной сферы, полученной при медленном изменении частоты от импульса к импульсу с огибающей отраженного сигнала ЛЧМ импульса, показало качественное их совпадение. Аналогичные результаты были получены и для алюминиевой сферы такого же диаметра.
При исследовании отраженных сигналов от групповой цели с помощью зондирующих ЛЧМ импульсов, при условиях эксперимента, таких же, как и при измерении с медленно меняющейся частотой для групповой цели, разница частоты девиации разностной частоты прямого и отраженного сигналов составляла от 30 до 40 кГц. Разница коэффициентов усиления приемного тракта для каналов прямого и отраженного сигналов составляла - 36 дБ. При этом отраженный импульс содержит биения двух частот, начало которых задержано относительно начала отраженного импульса на величину, равную расстоянию между объектами. Частота биений зависит от девиации частоты излучаемого сигнала и расстояния между объектами.
Как и в случае с медленно меняющей частотой, по форме отраженного ЛЧМ сигнала можно различать одиночную и групповую цели и оценивать расстояние между элементами групповой цели при расположении объектов на расстояниях, меньших длительности зондирующего импульса.
Совпадение огибающих отраженных сигналов от исследуемых объектов с их частотными зависимостями дает возможность за одну посылку при наличии обрабатывающей аппаратуры судить о частотных характеристиках отражающих объектов.
Результаты проведенных исследований отраженных сигналов от тел сферической формы позволяют сделать вывод о том, что параметрические антенны, обладающие широкополосностью, являются удобным инструментом для исследования отражающих свойств подводных объектов в широкой полосе частот.
Способ реализуется следующим образом.
В районе исследований на дне водоема размещают ответчики в количестве и последовательности в зависимости от удовлетворения требований, предъявляемых к точности определения координат подводного объекта и характера выполняемых исследовательских работ. При этом формируют из ответчиков две донные навигационные базы. Соответствующий каждый ответчик первой донной базы, механически связан с ответчиками второй навигационной базы, размещенными группой на расстояниях от соответствующего одиночного ответчика, меньше длительности зондирующего импульса акустического передатчика.
Каждый ответчик выполнен в виде сферы. Ответчики, формирующие первую донную навигационную базу выполнены из акустически жестких материалов, а ответчики второй базы выполнены из акустически мягких материалов. В точках, формирующих вторую навигационную базу, маяки размещены группами на расстояниях от соответствующего одиночного маяка первой донной навигационной базы меньше длительности зондирующего импульса акустического передатчика. Акустический передатчик излучает сигнал в сторону ответчиков с линейной частотной модуляцией, посредством параметрической антенны.
Объект навигации снабжен датчиком измерения скорости звука в воде, установленным на горизонте глубины акустического передатчика.
Излучающий тракт работает на принципе нелинейного взаимодействия акустических волн. Формирование исходных электрических сигналов осуществляется по двухканальной схеме. Сигналы с генераторов 1, 2 (фиг.1) поступают на импульсные модуляторы 4, 5, которые управляются импульсным генератором 3. Затем радиоимпульсы усиливаются усилителями мощности 6, 7 и излучаются в воду преобразователями накачки 8. Преобразователь накачки 8 представляет собой 28-элементную мозаичную антенную решетку, состоящую из пьезокерамических элементов прямоугольной формы, образующих два набора с различными резонансными частотами. Излучающая поверхность преобразователя накачки 8 имеет форму квадрата со стороной 75 мм.
Измерительный приемник (фиг.2) представляет собой двухканальное усилительное устройство, снабженное фильтром, стробирующим и решающим устройствами. Принятые гидрофоном 9 прямые (излученные антенной) и отраженные пассивным ответчиком сигналы поступают на входной фильтр нижних частот 10, который исключает попадание высокочастотных составляющих сигналов накачки в последующие каскады. Прошедшие через фильтр нижних частот сигналы разностной частоты усиливаются предварительным усилителем 11 и поступают на входы основных усилителей прямого 12 и отраженного 13 сигналов, в которых осуществляется временная селекция прямого и отраженного сигналов и усиление их до необходимых уровней. Работой стробирующих каскадов основных усилителей управляет импульсное устройство 14, которое формирует временные ворота для прямого и отраженного сигналов. Синхронизация импульсного устройства осуществляется формирователем 15. Установка коэффициентов усиления основных усилителей осуществляется кодом, формируемым в блоке управления 16. С выходов основных усилителей через полосовые фильтры 17 и 18 с регулируемой полосой пропускания сигналы с каналов для прямого и отраженного сигналов поступают на пиковые детекторы 19, 20. Регулировка полосы пропускания путем коммутации фильтров верхних и нижних частот по обоим каналам осуществляется блоком управления 21 фильтров. Пиковые детекторы фиксируют уровни напряжения прямого и отраженного сигналов, величины которых логарифмируются логарифмическими усилителями 22, 23 и поступают на вычитающее устройство 24. С вычитающего устройства 24 постоянное напряжение, пропорциональное разности между уровнями прямого и отраженного сигналов, поступает на решающее устройство 25, представляющее собой вычислительное устройство, реализованное на основе ПЭВМ PC/AT фирмы IBM с соответствующим программным обеспечением.
Импульсное устройство 14 перед приемом каждой следующей посылки вырабатывает импульс сброса и очищает память пиковых детекторов 19, 20. Для анализа прямого и отраженного сигналов одновременно или поочередно сигналы с выходов каналов прямого и отраженного сигналов, а также с выходов пиковых детекторов 19, 20 через коммутатор 26 поступают на сумматор 27, к выходу которого подключен регистратор 28. Измерительный приемник работает в диапазоне частот 5-50 кГц. Уровень шумов, приведенный ко входу по обоим каналам в полосе частот 5-50 кГц, не превышает 5 мкВ. Коэффициент усиления каждого канала изменяется в пределах 12-72 дБ. Фильтрами обеспечивается подавление высокочастотных сигналов накачки выше 100 кГц не мене 80 дБ.
Фильтр нижних частот 10 имеет частоты среза фильтра верхних частот 0,2; 2,5; 5; 10 кГц. Максимальная амплитуда входного сигнала в диапазоне рабочих частот составляет не более 1 В.
В качестве приемной антенны используется набранное из пьезокерамических широкополосных приемников кольцо вокруг преобразователя накачки либо расположенная таким же образом звукоприемная антенна из электретного кабеля.
В регистраторе 28, реализованном на основе микропроцессора, обеспечивающего ввод-вывод информации и преобразование сигналов от всех регистрирующих и измерительных устройств гидроакустической навигационной системы типа микропроцессора семейства A8rR фирмы АТМЕС, по форме отраженного огибающего эхо-сигнала (частотным зависимостям) в соответствии с классификационными признаками для каждой группы ответчиков устанавливаются позиционные номера ответчиков, координаты которых занесены в формуляр после установки ответчиков для проведения последующих исследований.
На решающее устройство 25 (вычислитель координат) также поступают значения скорости звука в воде, которые измеряются датчиком измерения скорости звука в воде, установленным на горизонте глубины акустического передатчика объекта навигации в моменты излучения и приема отраженных сигналов. Датчик измерения скорости звука в воде представляет собой циклический скоростемер (1. Гусев М.Н., Яковлев Г.В. Гидроакустические доплеровские лаги // Судостроение за рубежом, 1976, №5, с.53-57. 2. Судовые измерители скорости / А.А.Хребтов, В.Н.Кошкарев и др. - Судостроение, 1978, с.133) и учитывается при окончательном определении координат подводного объекта.
В отличие от аналогов и прототипа в предлагаемом способе используются пассивные маяки ответчики, не требующие энергетического обеспечения для их функционирования по прямому назначению. Обеспечивается возможность формировать донные навигационные базы любой конфигурации для обеспечения проводимых подводным объектом работ как по площадям, так и по строго определенным подводным трассам, например при укладке подводных коммуникаций.
Предлагаемый способ может также найти применение при обеспечении позиционирования подводных объектов.
Экспериментальные исследования проводились с использованием серийно изготовленной гидроакустической аппаратуре и отработанного программно-математического обеспечения.
Источники информации
1. Патент RU №2032187.
2. Патент RU №2289149.
3. Авторское свидетельство SU №713278.
4. Милн П.Х. Гидроакустические системы позиционирования. Л.: Судостроение, 1989, с.49-60.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
Использование: подводная навигация, а именно определение координат подводного объекта. Технический результат: сокращение трудоемкости определения координат подводных объектов, повышение точности измерений. Сущность: гидроакустическая навигационная система содержит донную навигационную базу из М ответчиков с различными частотами ответа fm, размещенные на объекте навигации акустический передатчик с частотой опроса f0, М-канальный приемник для приема ответных сигналов с частотами fm, M измерителей времени распространения акустических сигналов до ответчика, работающего на частоте этого канала, и обратно, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, вычислитель координат объекта навигации, дополнительную вторую донную навигационную базу из М ответчиков с различными частотами излучения Fm (m=1-M), механически связанных с соответствующими М ответчиками, при определении координат навигационного объекта учитывают скорость распространения звука в воде при этом ответчики первой и второй навигационных баз сформированы из ответчиков, выполненных в форме сферических поверхностей, ответчики первой навигационной базы выполнены из акустически жестких материалов, а ответчики второй базы выполнены из акустически мягких материалов, в точках, формирующих вторую навигационную базу, маяки размещены группами на расстояниях от соответствующего одиночного маяка, меньше длительности зондирующего импульса акустического передатчика, акустический передатчик излучает сигнал в сторону ответчиков с линейной частотной модуляцией, объект навигации снабжен датчиком измерения скорости звука в воде, установленным на горизонте глубины акустического передатчика. 7 ил.
Гидроакустическая навигационная система, содержащая донную навигационную базу из М ответчиков с различными частотами ответа fm, размещенные на объекте навигации акустический передатчик с частотой опроса f0, М-канальный приемник для приема ответных сигналов с частотами fm, M измерителей времени распространения акустических сигналов до ответчика, работающего на частоте этого канала, и обратно, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, вычислитель координат объекта навигации, дополнительную вторую донную навигационную базу из М ответчиков с различными частотами излучения Fm (m=1-M), механически связанных с соответствующими М ответчиками, при определении координат навигационного объекта учитывают скорость распространения звука в воде, отличающаяся тем, что ответчики первой и второй навигационных баз сформированы из ответчиков, выполненных в форме сферических поверхностей, ответчики первой навигационной базы выполнены из акустически жестких материалов, а ответчики второй базы выполнены из акустически мягких материалов, в точках, формирующих вторую навигационную базу, маяки размещены группами на расстояниях от соответствующего одиночного маяка, меньше длительности зондирующего импульса акустического передатчика, акустический передатчик излучает сигнал в сторону ответчиков с линейной частотной модуляцией, объект навигации снабжен датчиком измерения скорости звука в воде, установленным на горизонте глубины акустического передатчика.
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ МЕЛКОГО МОРЯ | 1999 |
|
RU2158431C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ МЕЛКОГО МОРЯ | 1999 |
|
RU2158431C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2032187C1 |
| JP 61151488 А, 10.07.1986 | |||
| JP 9068575 А, 11.03.1997. | |||

