Изобретение относится к области технических средств автоматизации боевых и рабочих процессов в танках, в боевых машинах пехоты и других военных гусеничных машинах (ВГМ) и может быть использовано при проектировании индивидуальных и коллективных рабочих мест операторов (членов экипажа) различных гусеничных и колесных машин.
Известно, что за счет развития структуры комплексов управления вооружением ВГМ, автоматизации процессов учета и ввода поправок на отклонения условий стрельбы от нормальных и совершенствования систем стабилизации вооружения в горизонтальной и вертикальной плоскостях, была существенно повышена эффективность стрельбы (см. Танк Т-72А. Техническое описание и инструкция по эксплуатации, кн. 1 - М.: Воениздат, 1988, - 107 с.). Но это привело к росту удельного веса составляющих ошибок стрельбы, обусловленных воздействием на операторов статических и динамических нагрузок, вызванных колебаниями боевой машины, движущейся по пересеченной местности.
К настоящему времени разработаны несколько вариантов компоновки танков и БМП с полной стабилизацией боевого отделения и рабочих мест операторов, примером которых могут служить конструкции легких башен LWT-3/2, LWT-3 и LWT-3M, созданные промышленностью ФРГ (см. Wehrtechnik, 1975, N 4, c. 146-152).
Данные конструкции, обеспечивающие сохранение заданного углового положения рабочих мест командира и наводчика относительно плоскости горизонта, обладают следующими принципиальными недостатками, делающими их практически непригодными для создания тяжелых танковых башен, стабилизированных в трех плоскостях:
значительное увеличение высоты боевого отделения;
рост требуемой мощности исполнительных приводов систем стабилизации, обусловленный необходимостью компенсации больших возмущающих воздействий, возникающих при движении ВГМ и стрельбе из основного и дополнительного вооружения;
сложность обеспечения требуемых углов снижения орудия при расположении оси цапф в плоскости погона башни;
невозможность минимизации линейных ускорений (в первую очередь их продольных и вертикальных составляющих), возникающих при движении боевой машины и в значительной степени определяющих уровень динамических нагрузок на членов экипажа.
В качестве прототипа выбрано рабочее место наводчика ВГМ - танка Т-80Б, содержащее прицел, кресло оператора, датчик крена системы управления огнем, пульт управления и механически связанный с ним прицел, в корпусе которого установлены оптический блок, стабилизирующий блок, блок дальности, измеритель временных интервалов, головка, образующие объективную часть прицела, а также панель управления и окуляр, составляющие его окулярную часть, с которой соединен налобник прицела (Танк Т-80Б. Техническое описание и инструкция по эксплуатации, кн. 1, - М.: Воениздат, 1984, - 152 с.).
Недостатком прототипа является снижение эффективности боевой деятельности экипажа (увеличение времени поиска целей, уменьшение предельной дальности их обнаружения, увеличение ошибки наведения и прицеливания) из-за роста времени перерывов в наблюдении и понижении разрешающей способности системы "прибор-глаз", вызванных воздействием линейных ускорений (в первую очередь их продольных и вертикальных составляющих), возникающих при движении боевой машины.
Задачей настоящего изобретения является повышение эффективности боевой деятельности оператора (члена экипажа ВГМ) за счет уменьшения действующих на него статических и динамических нагрузок при движении боевой машины по пересеченной местности.
Решение поставленной задачи достигается за счет стабилизации углового положения рабочего места оператора в трех плоскостях и его подрессоривания.
А в связи с тем, что оператор располагается в башне, стабилизированной в горизонтальной плоскости, то для трехплоскостной стабилизации и сохранения заданного углового положения элементов рабочего места достаточно иметь две системы их горизонтирования в продольной и поперечной плоскостях, а для уменьшения (гашения) линейных ускорений - две системы подрессоривания в вертикальной и продольной плоскостях.
На фиг. 1 показано рабочее место оператора ВГМ (конструктивная схема рабочего места члена экипажа);
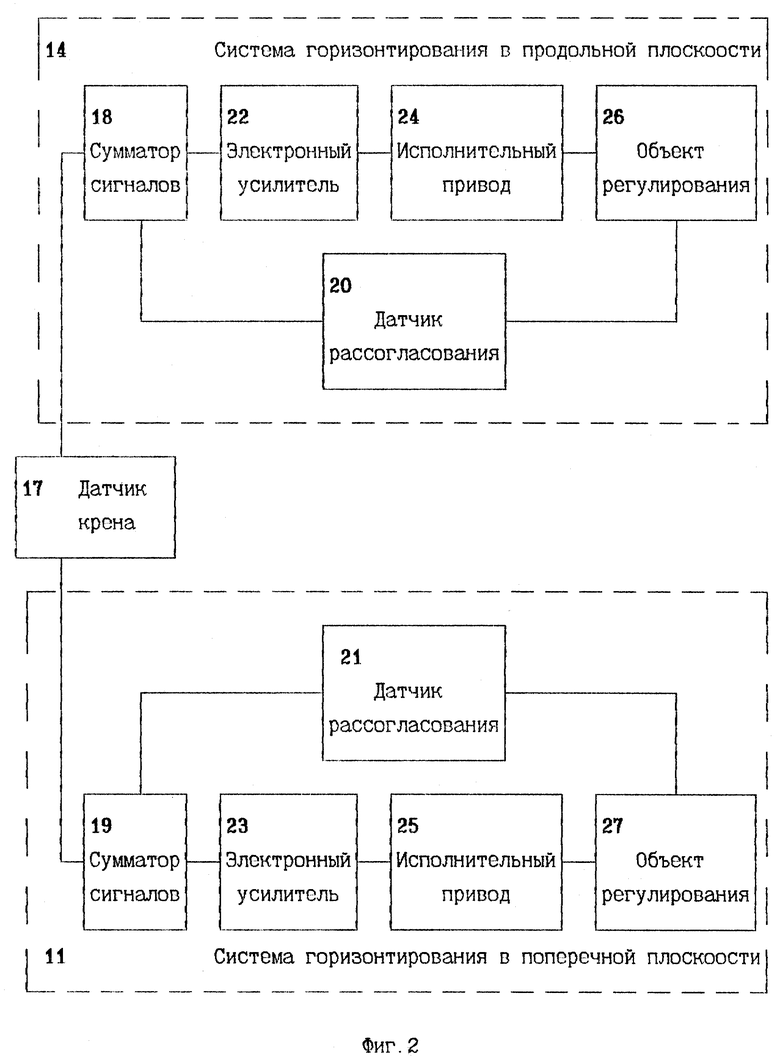
на фиг. 2 - рабочее место оператора ВГМ (функциональная схема систем горизонтирования в продольной и поперечной плоскостях).
где: 1 - корпус объективной части прицела;
2 - корпус окулярной части прицела;
3 - световод;
4 - панель управления;
5 - окуляр;
6 - налобник;
7 - пульт управления;
8 - система подрессоривания в продольном направлении;
9 - обойма с подшипниками;
10 - зубчатый сектор;
11 - система горизонтирования в поперечной плоскости;
12 - кресло оператора;
13 - полуось;
14 - система горизонтирования в продольной плоскости;
15 - система подрессоривания в вертикальном направлении;
16 - крыша башни;
17 - датчик крена;
18, 19 - сумматоры сигналов;
20, 21 - датчики рассогласования;
22, 23 - электронные усилители;
24, 25 - исполнительные приводы;
26, 27 - объекты регулирования.
Сущность изобретения состоит в том, что прицел оператора разделен на две части, именуемые в дальнейшем объективной и окулярной частями прицела, которые выполняются в двух отдельных корпусах 1 и 2, механически нежестко соединенных между собой, а оптическая связь между ними осуществляется с помощью гибкого световода 3.
Объективная часть прицела представляет собой корпус 1, жестко закрепленный в башне, в котором содержатся блоки, принципиально не отличающиеся от аналогичных блоков прототипа (оптический блок, стабилизирующий блок, блок дальности, измеритель временных интервалов, головка).
Окулярная часть прицела содержит корпус 2, панель управления 4, на которой установлены органы управления, содержащиеся на крышке прицела-прототипа, а также непосредственно сам окуляр 5, налобник 6, пульт управления 7, аналогичные прототипу.
На корпус окулярной части прицела 2 установлены: система подрессоривания в продольном направлении 8, обойма с подшипниками 9 и зубчатый сектор 10 системы горизонтирования в поперечной плоскости 11. С обоймой 9 жестко связаны следующие элементы рабочего места оператора: налобник 6, панель управления 4, пульт управления 7, кресло оператора 12 и система горизонтирования в поперечной плоскости 11.
Система подрессоривания в продольном направлении 8 через одну из полуосей 15 и систему горизонтирования в продольной плоскости 14 кинематически связана с системой подрессоривания в вертикальном направлении 13, которая крепится к крыше башни 16.
Под воздействием вертикальных составляющих линейных ускорений в башне танка кресло оператора 12, окулярная часть прицела 2 и все связанные с ними узлы и детали перемещаются относительно башни, благодаря системе подрессоривания в вертикальном направлении 13, которая гасит эти составляющие линейных ускорений.
Работа системы подрессоривания в продольном направлении 8 осуществляется аналогично. При этом окулярная часть прицела 2 под действием продольных линейных ускорений перемещается с направляющих системы подрессоривания 8. Вместе с ней перемещаются и все остальные подвижные элементы рабочего моста. В результате обеспечивается снижение величины линейных ускорений, действующих на оператора при движении боевой машины.
Функциональные схемы систем горизонтирования в продольной 14 и поперечной 11 плоскостях, представленные на фиг. 2, практически идентичны.
Для выработки электрических сигналов, пропорциональных углам наклона башни в продольной и поперечной плоскостях, используется датчик крена 17 системы управления огнем, аналогичный прототипу.
Сигналы, вырабатываемые датчиком крена, поступают в соответствующие системы горизонтирования, где в сумматорах 18, 19 складываются с сигналами обратной связи от датчиков рассогласования 20, 21, предназначенных для измерения относительного углового положения башни и рабочего места оператора в соответствующей плоскости.
Суммарные сигналы усиливаются, преобразуются электронными усилителями 22, 23 и поступают на исполнительные приводы 24, 25, которые создают стабилизирующий момент на объектах регулирования 26, 27 соответствующих систем горизонтирования.
Объектом регулирования 26 в системе горизонтирования в продольной плоскости 14 является окулярная часть прицела 2 и все связанные с ней элементы рабочего места оператора, которые под воздействием стабилизирующего момента поворачиваются относительно полуосей 15 до тех пор, пока угловое положение рабочего места в продольной плоскости не совпадет с заданным (в этом случае сигнал от датчика рассогласования 20 станет равным сигналу датчика крена 17).
Объектом регулирования 27 в системе горизонтирования в поперечной плоскости 11 является кресло оператора 12 и все связанные с ним элементы рабочего места оператора, которые под воздействием стабилизирующего момента поворачиваются в поперечной плоскости относительно корпуса окулярной части прицела 2 на обойме с подшипниками 6.
В результате, независимо от величины и знака углов наклона башни в поперечной и продольной плоскостях сохраняется заданное угловое положение элементов рабочего места оператора относительно горизонтальной плоскости.
Таким образом, предлагаемая функционально-конструктивная схема обеспечивает как стабилизацию углового положения рабочего места оператора в трех плоскостях, так и минимизацию продольных и вертикальных составляющих линейных ускорений, возникающих при движении боевой машины. Ее реализация в перспективных танках, БМП и другие ВГМ позволит существенно повысить эффективность боевой деятельности операторов (командиров и наводчиков) за счет максимального приближения условий их работы в движущейся машине к условиям работы на месте, а следовательно, приведет к уменьшению времени разведки целей из движущейся боевой машины и увеличению предельной дальности их обнаружения за счет сокращения времени перерывов в наблюдении и повышения разрешающей способности системы "прибор-глаз".
Источники информации
1. Танк Т-80Б. Техническое описание и инструкция по эксплуатации. Кн. 1. - М.: Воениздат, 1984, 152 с.
2. Танк Т-72А. Техническое описание и инструкция по эксплуатации. Кн. 1. - М.: Воениздат, 1986, 107 с.
3. Wehrtochnik. - 1975, N 4, c. 146-152.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧЕЕ МЕСТО ОПЕРАТОРА ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1998 |
|
RU2146797C1 |
| УЧЕБНО-ТРЕНИРОВОЧНОЕ СРЕДСТВО | 1998 |
|
RU2130158C1 |
| УЧЕБНО-ТРЕНИРОВОЧНОЕ СРЕДСТВО | 1998 |
|
RU2126127C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ВЫСТРЕЛОВ ВО ВРАЩАЮЩИЙСЯ ТРАНСПОРТЕР АВТОМАТА ЗАРЯЖАНИЯ | 1997 |
|
RU2118778C1 |
| КОНТРОЛЬНО-ТРЕНИРОВОЧНЫЙ ПРИБОР | 1997 |
|
RU2120598C1 |
| СПОСОБ ВИЗИРОВАНИЯ | 1994 |
|
RU2090823C1 |
| САМОХОДНАЯ АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 1999 |
|
RU2169337C2 |
| БРОНИРОВАННАЯ РЕМОНТНО-ЭВАКУАЦИОННАЯ СОЧЛЕНЕННАЯ МАШИНА | 1995 |
|
RU2116217C1 |
| БРОНИРОВАННАЯ СОЧЛЕНЕННАЯ МАШИНА | 1995 |
|
RU2086893C1 |
| БРОНИРОВАННАЯ СОЧЛЕНЕННАЯ МАШИНА | 1995 |
|
RU2088885C1 |
Изобретение относится к области технических средств автоматизации боевых и рабочих процессов в танках, боевых машинах пехоты и других военных гусеничных машинах (ВГМ) и может быть использовано при проектировании индивидуальных и коллективных рабочих мест операторов (членов экипажа) различных гусеничных и колесных машин. Техническим результатом изобретения является повышение эффективности боевой деятельности оператора (командира, наводчика) ВГМ за счет максимального приближения условий их работы в движущейся машине к условиям работы на месте. Сущность: обеспечиваются стабилизация углового положения рабочего места оператора в трех плоскостях и минимизация воздействующих на него продольных и вертикальных составляющих линейных ускорений, возникающих при движении ВГМ, за счет оснащения системами подрессоривания в продольном и вертикальном направлениях и системами горизонтирования в продольной и поперечной плоскостях кресла оператора, соединенного с окулярной частью прицела, выполненной в отдельном корпусе и оптически связанной с помощью гибкого световода с объективной частью прицела, жестко закрепленной на крыше башни ВГМ. 2 ил.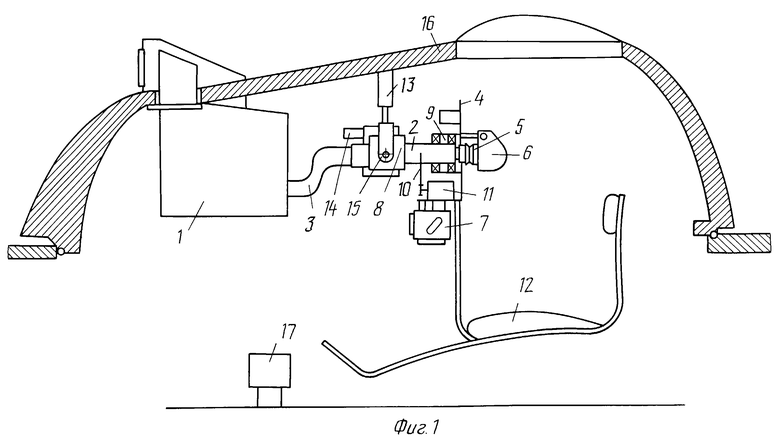
Рабочее место оператора военной гусеничной машины, содержащее кресло оператора, датчик крена, пульт управления и механически связанный с ним прицел, в корпусе которого установлены оптический блок, стабилизирующий блок, блок дальности, измеритель временных интервалов и головка, образующие объективную часть прицела, а также панель управления и окуляр, составляющие его окулярную часть, с которой соединен налобник прицела, отличающееся тем, что оно снабжено системами подрессоривания в продольном и вертикальном направлениях и системами горизонтирования в продольной и поперечной плоскостях, каждая из которых входом связана с соответствующим выходом датчика крена и включает сумматор сигналов, датчик рассогласования, электронный усилитель и исполнительный привод, а на корпусе окулярной части прицела, которая связана гибким световодом с прикрепленной к крыше башни его объективной частью, на подшипниках качения установлена вращающаяся в поперечной плоскости обойма, соединенная с панелью управления, пультом управления, креслом оператора и налобником прицела, корпус окулярной части которого через систему подрессоривания в продольном направлении и полуоси ее крепления соединен с системой подрессоривания в вертикальном направлении, связанной с крышей башни военной гусеничной машины, причем обе системы подрессоривания кинематически связаны элементами системы горизонтирования в продольной плоскости, а исполнительный привод системы горизонтирования в поперечной плоскости через редуктор соединен с корпусом окулярной части прицела.
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ИНДИКАТОР РАЦИОНАЛЬНЫХ УСЛОВИЙ СТРЕЛЬБЫ | 1997 |
|
RU2121125C1 |
| RU 94024245 A1, 27.04.97 | |||
| US 5187317 A, 16.02.93 | |||
| US 5347910 A, 20.09.94 | |||
| СПОСОБ ВЫВОДА ИЗ РАБОТЫ ОДНОГО ИЛИ БОЛЕЕ ЦИЛИНДРОВ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2014 |
|
RU2656077C2 |
| DE 3332416 C3, 21.03.85 | |||
| DE 3134012 A1, 17.03.83. | |||
