Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля и диагностики состояния сооружений газо- и нефтепроводов, насосных станций, коллекторов, инженерных сооружений, находящихся в сейсмически неустойчивой зоне или в зоне неустойчивого грунта, оползней, болот, дна рек и морей, вечной мерзлоты и др.
Известны способ и устройство для контроля за герметичностью проложенных в свободном пространстве и в грунте трубопроводов и конструкций и термопластичной пластмассы (1). Устройство содержит датчик и блок обработки данных, датчик образован одной однородной тонкослойной пленкой, выполненной из электрически проводящего термопластичного материала определенных размеров. Электрически проводящий слой пленки связан с помощью кабеля одним концом с высокочастотным электрическим прибором, другой полюс которого связан с коунтерэлектродом, установленным параллельно с электрически проводящим слоем, что позволяет выдавать контрольный сигнал о состоянии объекта.
Недостатком известного решения является то, что невозможно осуществлять непрерывный во времени контроль состояния объектов, невозможность осуществления контроля в любой конкретный момент времени по всей трассе трубопровода.
Наиболее близким к заявленному техническому решению является способ дистанционного контроля и диагностики состояния трубопроводов, заключающийся в том, что на пункте контроля через линию связи производят регистрацию показаний с блоков измерения, размещенных по трассе расположения объектов контроля, фиксируется местоположение того блока измерения, на котором сигнал не соответствует заранее зафиксированной величине, запомненной в схеме этого блока измерений (2). Измененный по сравнению с первоначальным по частоте сигнал передается на приемную станцию. Наиболее близким является устройство дистанционного контроля и диагностики трубопроводов, содержащее центральный пункт контроля, блоки измерения, расположенные на диагностируемой поверхности по трассе размещения объектов контроля и линию связи. В каждом блоке измерения содержится датчик давления или течи и элемент сравнения с эталонным сигналом, а сигнал рассогласования передается на пункт контроля по проводной линии связи (2).
Недостатком способа и устройства является невозможность получения сигнала контроля в каждый момент времени с конкретного заданного блока измерения и отсутствие обеспечения контроля изменения положения контролируемой конструкции, а также невозможность контроля при отсутствии линий связи в труднодоступных районах.
Техническим результатом при использовании изобретения является повышение оперативности контроля и расширение области применения.
Результат достигается тем, что в способе дистанционного контроля и диагностики состояния конструкции трубопроводов и инженерных сооружений, заключающийся в том, что на пункте контроля через линию связи производят регистрацию сигналов с блоков измерения, размещенных на поверхности объекта в местах диагностирования вдоль трассы расположения объекта контроля, а о наличии изменений контролируемого параметра судят по отклонению его от заранее зафиксированного значения, формируют на пункте контроля кодированные радиосигналы, каждый из которых соответствует коду одного из блоков измерения, производят опрос блоков измерения кодированными радиосигналами, принимают сигналы на блоках измерения, производят сравнение кода блока измерения с кодом сигнала опроса и при их совпадении производят с соответствующего блока измерения передачу на пункт контроля сигнала, несущего измерительную информацию, а сравнение ее с заранее зафиксированным значением производят на пункте контроля.
Результат достигается также тем, что в устройстве дистанционного контроля и диагностики состояния конструкции трубопровода, содержащем центральный пункт контроля, блоки измерения, размещенные на поверхности объекта в местах диагностирования вдоль трассы расположения объекта контроля, и линию связи центрального пункта контроля и блоков измерения, отличающееся тем, что центральный пункт контроля выполнен в виде ЭВМ с принтером, блока последовательного интерфейса, соединенного с ее входом-выходом, соединенных последовательно кодера, модулятора, радиоприемопередатчика, демодулятора и декодера, выход которого связан с вторым входом блока последовательного интерфейса, второй выход которого соединен с входом кодера, каждый блок измерения выполнен в виде соединенных последовательно коммутатора, вторичного блока питания, датчика горизонта, аналого-цифрового преобразователя, кодера, модулятора, радиоприемопередатчика, демодулятора, декодера с схемой сравнения, выход которого подключен к первому входу коммутатора, к второму входу которого подключен автономный источник питания, а линией связи является линия радиосвязи через антенны радиоприемопередатчиков.
На чертеже представлена блок-схема устройства, реализующего способ дистанционного контроля и диагностики.
Устройство состоит из центрального пункта контроля, выполненного в виде ЭВМ 1 с подключенными к ней принтером 2, блок 3 питания, блока 4 последовательного интерфейса, выход-вход которого подключен к входу-выходу ЭВМ 1, соединенных последовательно кодера 5, модулятора 6, радиоприемопередатчика 7, демодулятора 8, декодера 9, выход которого подключен к второму входу блока 4, блока измерений (деформаций), выполненного в виде соединенных последовательно датчика 10 горизонта, аналого-цифрового преобразователя (АЦП) 11, кодера 12, модулятора 13, радиоприемопередатчика 14, демодулятора 15, декодера 16 со схемой сравнения и коммутатора 17, второй вход которого подключен к автономному источнику 18 питания, выход коммутатора 17 подключен через вторичный блок 19 питания к входу датчика 10 горизонта.
Способ осуществляется описанным устройством следующим образом.
Оператор с целью получения информации, например, с одного конкретного блока измерения подает с ЭВМ 1 командный сигнал, который поступает на блок 4 последовательного интерфейса, который обеспечивает стыковку выхода ЭВМ 1 с участком схемы, кодер 5, модулятор 6 и в закодированном виде на частоте модуляции радиосигнала радиоприемопередатчиком 7 транслируется в эфир.
Кодированный радиосигнал принимается радиоприемопередатчиком 14 всех блоков измерения, которые постоянно работают в приемном режиме.
Принятый сигнал во всех блоках измерения проходит демодулятор 15 и декодер 16, где с помощью схемы сравнения сравнивается с присущим конкретному блоку измерения кодом, если принятый код и код в схеме сравнения совпадут, то сигнал проходит на коммутатор 17, подключающий автономный источник 18 к вторичному блоку 19 питания, и информация с датчика 10, соответствующая углу наклона конструкции, на которой он установлен, поступает в аналоговом виде на АЦП 11, откуда в цифровом виде последовательно проходит кодер 12, позволяющий за счет специального кодирования избежать влияния помех и повысить различимость на фоне других информационных сигналов, далее сигнал идет на модулятор 13, где он модулируется радиочастотой и передается передающей антенной радиоприемопередатчика 14 на пункт контроля, где сигнал последовательно преобразуется и поступает на ЭВМ 1, где текущее значение угла наклона запрашиваемого блока измерения информации сравнивается с начальным, заложенным в блок памяти ЭВМ 1. Полученная информация протоколируется с выводом на принтер 2, по результатам обработки информации принимаются решения по проведению профилактических и ремонтных работ.
Кроме того, если позволяют условия, линия связи может быть любой, в частности и проводной.
Следует отметить, что автономный источник 18 питания и коммутатор 17 могут быть едиными для всех блоков измерения на приемном пункте и тогда один коммутатор 17 будет подключать источник 18 только к вторичному блоку 19 питания в том блоке измерения, код которого совпадает с кодом запроса пункта измерения.
Следует также отметить, что пункт контроля может быть выполнен подвижным, а связь между ним и блоками измерения может осуществляться по любой линии связи.
Описанное техническое решение позволяет с относительно небольшими начальными затратами обеспечить непрерывный дистанционный контроль за деформацией сооружений всех конструкций по всей трассе.
Источники информации
1. EP N 0511343, G 01 M 3/18, 1991.
2. Патент США N 3851521, G 01 M 3/16, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОЖИДКОСТНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА (ВАРИАНТЫ) | 1996 |
|
RU2115091C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ И ДИАГНОСТИКИ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ КОНСТРУКЦИИ ТРУБОПРОВОДОВ | 2011 |
|
RU2474754C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ КОНСТРУКЦИИ И ИНЖЕНЕРНЫХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2247958C2 |
| СПОСОБ КОНТРОЛЯ ПРОЧНОСТИ И ВИБРАЦИИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2363935C1 |
| УСТРОЙСТВО ДЛЯ ТЕЛЕУПРАВЛЕНИЯ И ТЕЛЕСИГНАЛИЗАЦИИ | 1995 |
|
RU2111545C1 |
| ПРИЕМОПЕРЕДАТЧИК ВОЛОКОННО-ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ | 1989 |
|
RU2221342C2 |
| РЕТРАНСЛЯТОР | 2023 |
|
RU2808202C1 |
| УСТРОЙСТВО ТЕЛЕМЕХАНИКИ | 1995 |
|
RU2111546C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ПЕРЕДАЧИ ДАННЫХ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2008 |
|
RU2356171C1 |
| МНОГОКАНАЛЬНАЯ АППАРАТУРА ПЕРЕДАЧИ ДАННЫХ | 2009 |
|
RU2406121C2 |
Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля состояния сооружений трубопроводов, в частности газо- и нефтепроводов, насосных станций, коллекторов и т.д., в сейсмически неустойчивых районах, зонах неустойчивого грунта и вечной мерзлоты. Способ основан на дистанционном опросе датчиков, расположенных в диагностируемых точках контролируемых объектов. Центральный пункт контроля посылает на блоки измерения кодированный радиосигнал запроса. Измерительная информация передается на центральный пункт контроля тем блоком измерения, чей собственный код совпал с кодом сигнала запроса. Техническим результатом изобретения является повышение оперативности контроля и расширение области применения. 2 с.п. ф-лы, 1 ил.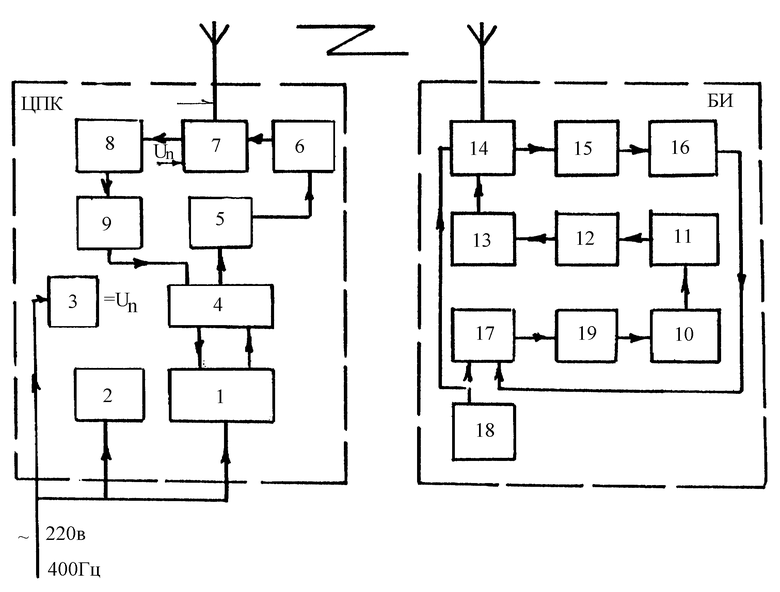
| US 3851521 A, 03.12.74 | |||
| US 4452087 A, 05.06.84 | |||
| СПОСОБ ЛЕЧЕНИЯ МЕСТНОРАСПРОСТРАНЕННЫХ ФОРМ РАКА МОЧЕВОГО ПУЗЫРЯ | 2004 |
|
RU2260434C1 |
| Евтихиев Н.Н | |||
| и др | |||
| Измерение электрических и неэлектрических величин | |||
| Учеб | |||
| пособие для вузов | |||
| - М.: Энергоатомиздат, 1990, с | |||
| Льночесальная машина | 1923 |
|
SU245A1 |
